ESP8266是一种低成本的Wi-Fi模块,可用于连接物联网设备,控制器和传感器等。它具有小巧、高度集成和低功耗的特点,因此在物联网应用中被广泛使用。ESP8266模块由Espressif Systems开发,具有单芯片的封装和多种功能,包括Wi-Fi网络连接、GPIO控制、PWM控制和模拟输入/输出等。ESP8266模块支持多种编程语言和开发工具,包括C语言、Lua脚本和Arduino开发环境。ESP8266模块的一个优点是它的成本相对较低,因此可以用于低成本的物联网项目。另外,由于它具有小巧的封装和低功耗的特性,因此它可以在嵌入式系统和移动设备中使用。
总之,ESP8266模块是一种功能强大、低成本、小巧、低功耗的Wi-Fi模块,非常适合用于物联网和其他嵌入式应用中。
我在本次开发中选择的是模块型号为ESP8266-01S,与ESP8266一样,他们都有8个引脚,我们只用得到其中的4个引脚,分别是:
VCC:电源引脚,接收3.3V的直流电源。(也可以接5V)
VCC:电源引脚,接收3.3V的直流电源。
TXD:串行传输引脚,用于发送串行数据。
RXD:串行接收引脚,用于接收串行数据。
而唯一与ESP8266不同的是,esp8266需要接第5个引脚EN,接在高电平上。
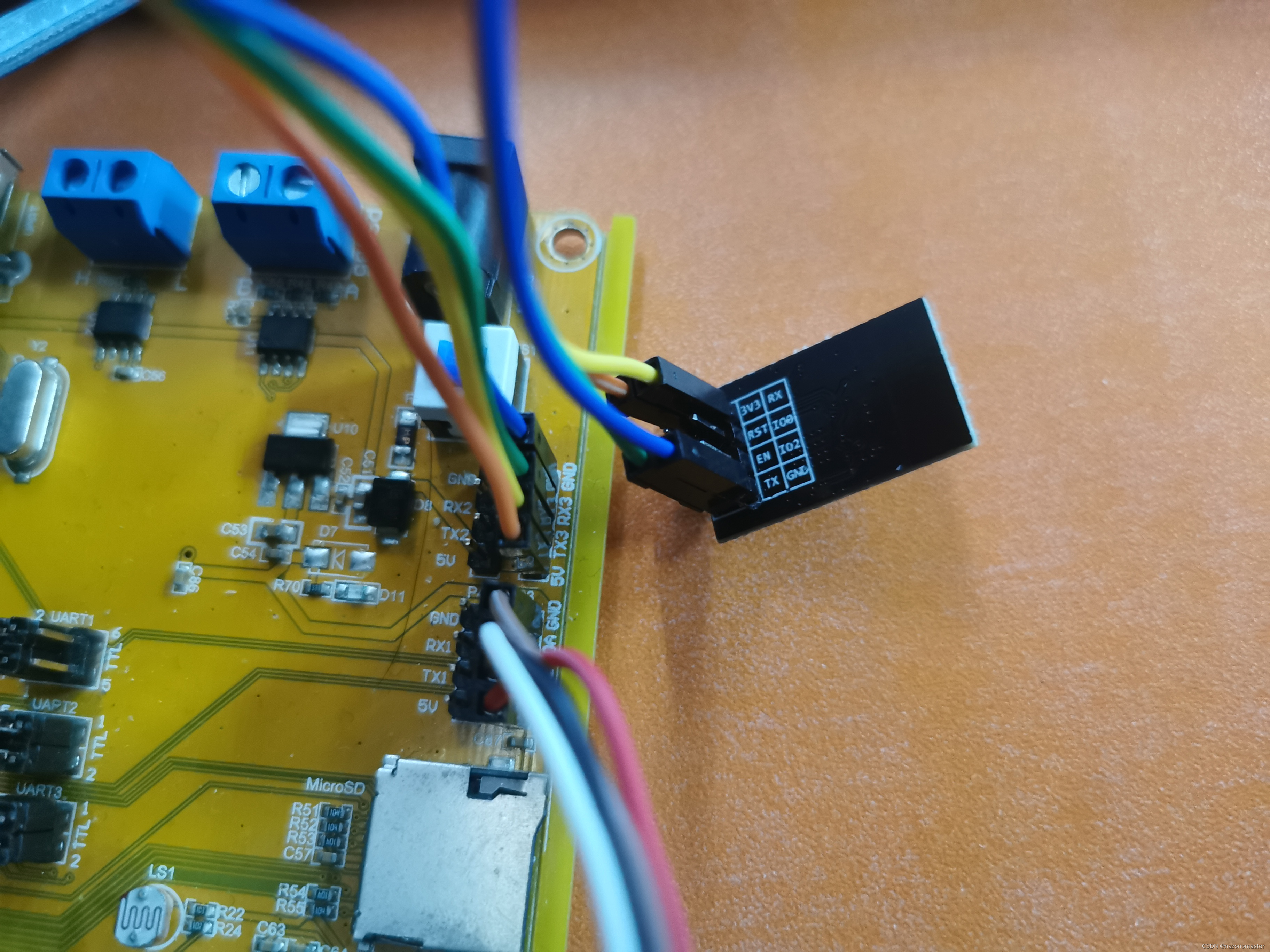
在与STM32连接时,VCC接3.3V或5V,GND接地,TX接在32单片机的RX上,RX接在32单片机的TX上。我使用的32单片机型号为STM32F407ze,通过查找资料可知,其内部的电路图大致如下图所示:
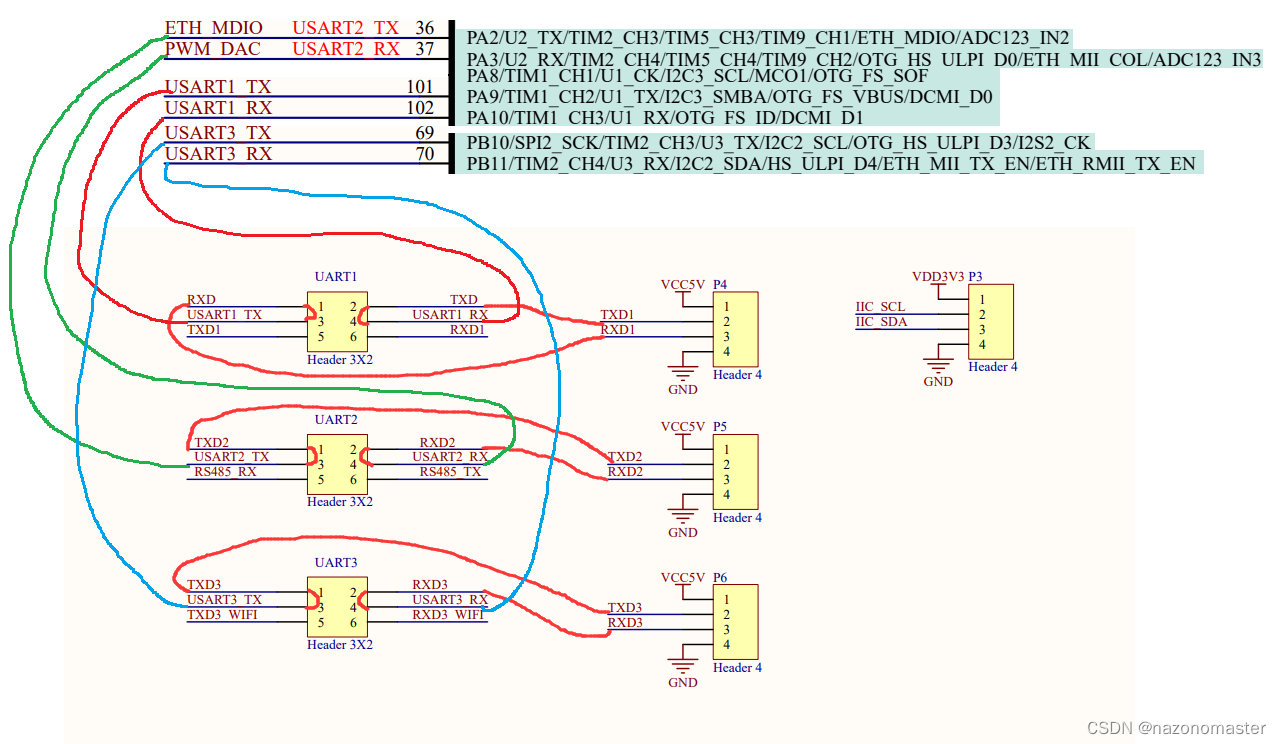
我选择把WiFi模块连接到P6上,以下是我的实物连接图(下面那个是我连接的OLED模块,不用理会):
接下来就是敲代码让他运行起来了。
首先是定义串口,定义串口1是为了将串口3的收到数据发给电脑看。定义串口3用于WiFi模块的使用。
这段代码是用于配置STM32芯片上的UART1串口,并定义了一个函数 send_sring 用于通过UART1发送字符串。
#include "uart.h"
void UART1_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
//初始化GPIOA的时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);
//初始化串口1的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
//通过结构体初始化串口引脚
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9 | GPIO_Pin_10; //配置的引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //复用模式
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽模式
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //速度为100MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL; //上下拉电阻:无上下拉电阻
GPIO_Init(GPIOA, &GPIO_InitStructure);
//选择引脚复用功能
GPIO_PinAFConfig(GPIOA, GPIO_PinSource9, GPIO_AF_USART1);
GPIO_PinAFConfig(GPIOA, GPIO_PinSource10, GPIO_AF_USART1);
//配置串口相关属性
USART_InitStructure.USART_BaudRate = 115200; //波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b; //数据位
USART_InitStructure.USART_StopBits = USART_StopBits_1; //停止位
USART_InitStructure.USART_Parity = USART_Parity_No; //校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //无流控
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //接收发送模式
USART_Init(USART1, &USART_InitStructure);
//配置串口的中断(数据接收触发中断)
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
//串口1工作
USART_Cmd(USART1,ENABLE);
}
/* 参数:要发送的字符串,要求字符串末尾以 \0 结尾 */
void send_string(char *arr)
{
while(*arr) //判断字符串是否结束
{
//通过串口1发送数据到PC
USART_SendData(USART1, *arr++);
while(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);//等待发送数据完毕
}
}
这里面定义了串口3的定义函数,中断函数和数据发送函数。在中断函数获取串口3收到的数据,其中包含单片机发给串口3的,也含括WiFi模块接收到消息并回传给串口3的。32单片机发给串口3的数据不需要我们获取,关键是如何获取WiFi模块收到手机的数据后回传给串口3的数据。
要知道如何获取WiFi模块收到手机的数据后回传给串口3的数据,首先要知道WiFi模块要如何工作。WiFi模块的配置工作在下面,可以先去看看。
在多次调试与测试时我发现,WiFi模块在接收手机发来的数据时,会以“数据来源:数据”的格式将数据发给串口,所以我们只要在串口中断中,获取数据,然后在数据里找到带有“:”的数据,“:”往后几个字节就是手机发来的数据。
在函数中,我定义了 USART3_RX_BUF [USART3_MAX_RECV_LEN] 用于保存所有串口接收到的数据,然后在 USART3_RX_BUF 中查询是否含有 “:”,如果有,就说明是手机发来的数据,我将 “:” 后面的11个字节保存到 get_data[11] 中(这个数组大小可变,因为我设定的是手机发送9个字节给WiFi模块,所以才定义了个大小为 11 的数组变量 get_data)。因为我手机发送的数据是以空格为间隔的三个数值,比如“ 40 50 20”,为了从 u8 类型的数组变量中获取这三个数值,我把 u8 类型的 get_data 转化为字符类型的 str_get_data[11],利用 strtok 函数把字符串 str_get_data[11] 以空格拆分,再把拆下来的部分转化为整型赋值给阈值参数。
#include "uart3.h"
#include "delay.h"
#include "stdarg.h"
#include "stdio.h"
#include "string.h"
#include "tim.h"
int i=0;
extern u8 Temperature_yu,Smog_yu,CO_yu;
//串口发送缓存区
__align(8) u8 USART3_TX_BUF[USART3_MAX_SEND_LEN]; //发送缓冲,最大USART3_MAX_SEND_LEN字节
#ifdef USART3_RX_EN //如果使能了接收
//串口接收缓存区
u8 USART3_RX_BUF [USART3_MAX_RECV_LEN]; //接收缓冲,最大USART3_MAX_RECV_LEN个字节.
//通过判断接收连续2个字符之间的时间差不大于100ms来决定是不是一次连续的数据.
//如果2个字符接收间隔超过100ms,则认为不是1次连续数据.也就是超过100ms没有接收到
//任何数据,则表示此次接收完毕.
//接收到的数据状态
//[15]:0,没有接收到数据;1,接收到了一批数据.
//[14:0]:接收到的数据长度
u16 USART3_RX_STA=0;
void USART3_IRQHandler(void)
{
u8 res;
int j,k,find;
u8 get_data[11];//用于保存手机发送的数据
char str_get_data[11];//用于把手机发送的数据转换为字符类型
char* token;
if(USART_GetITStatus(USART3,USART_IT_RXNE) != RESET)//接收到数据
{
res =USART_ReceiveData(USART3);
if((USART3_RX_STA&(1<<15))==0)//接收完的一批数据,还没有被处理,则不再接收其他数据
{
if(USART3_RX_STA<USART3_MAX_RECV_LEN)//还可以接收数据
{
USART3_RX_BUF[USART3_RX_STA++]=res;
// 判断接收到的数据是否为esp8266发送的数据
if(res == '\n' && USART3_RX_BUF[USART3_RX_STA - 2] == '\r')
{
// 提取接收缓存区中的数据并进行处理
if(USART3_RX_BUF[0] == '\n' || USART3_RX_BUF[0] == '\r' ){} //舍弃换行符,以免输出空行
else{
if(i<47){ //过滤掉重置wifi模块时传给串口3的返回值
i++;
}
else{
printf("串口3收到%s",USART3_RX_BUF);
/*寻找 USART3_RX_BUF 中的冒号*/
for(j=0;j<20;j++){
find = 0;
if(USART3_RX_BUF[j] == ':')
{
find = 1;//找到后find = 1,退出循环
break;
}
}
if(find==1){
for(k=0;k<10;k++){
get_data[k] = USART3_RX_BUF[k+j];
}
printf("get_data%s\n",get_data);
snprintf(str_get_data, sizeof(str_get_data), "%s", get_data);
// 按空格分割字符串
token = strtok(str_get_data, " ");
if (token != NULL) {
// 第一个数值
token = strtok(NULL, " ");
if (token != NULL) {
Temperature_yu = atoi(token);
// 第二个数值
token = strtok(NULL, " ");
if (token != NULL) {
Smog_yu = atoi(token);
// 第三个数值
token = strtok(NULL, " ");
if (token != NULL){
CO_yu = atoi(token);
} else {
// 如果没有第三个数值,可以给它赋一个默认值
CO_yu = 20;
}
} else {
// 如果没有第二个数值,可以给它赋一个默认值
CO_yu = 20;
}
} else {
// 如果没有任何数值,可以给它们都赋一个默认值
Temperature_yu = 40;
Smog_yu = 20;
CO_yu = 20;
}
} else {
// 如果没有任何数值,可以给它们都赋一个默认值
Temperature_yu = 40;
Smog_yu = 20;
CO_yu = 20;
}
}
}
}
// 清空接收缓存区
USART3_RX_STA = 0;
memset(USART3_RX_BUF, 0, sizeof(USART3_RX_BUF));//用于清空接收缓存区USART3_RX_BUF,将其中的所有元素都设置为0
}
}
else
{
USART3_RX_STA|=1<<15;
}
}
}
}
#endif
void UART3_Config(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB,ENABLE);//使能GPIOB时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART3,ENABLE);//使能USART3时钟
USART_DeInit(USART3);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11 | GPIO_Pin_10;//GPIOB11和GPIOB10初始化
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF ;//复用功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//速度50MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//推挽复用输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;//上拉
GPIO_Init(GPIOB,&GPIO_InitStructure);//初始化GPIOB11,和GPIOB10
GPIO_PinAFConfig(GPIOB,GPIO_PinSource11,GPIO_AF_USART3);//GPIOB11复用为USART3
GPIO_PinAFConfig(GPIOB,GPIO_PinSource10,GPIO_AF_USART3);//GPIOB10复用为USART3
USART_InitStructure. USART_BaudRate = 115200;//波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;//收发模式
USART_Init(USART3, &USART_InitStructure);//初始化串口3
USART_ITConfig(USART3,USART_IT_RXNE,ENABLE);//开启中断
NVIC_InitStructure.NVIC_IRQChannel = USART3_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=0 ;//抢占优先级2
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;//子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;//IRQ通道使能
NVIC_Init(&NVIC_InitStructure);//根据指定的参数初始化VIC寄存器
// TIM7_Config(1000-1,8400-1); //100ms中断
USART3_RX_STA=0;//清零
TIM_Cmd(TIM7,DISABLE);//关闭定时器7
USART_Cmd (USART3,ENABLE);//使能串口
}
//串口3,printf 函数
//确保一次发送数据不超过USART3_MAX_SEND_LEN字节
void u3_printf(char* fmt, ...)
{
u16 i,j;
va_list ap;
va_start(ap,fmt);
vsprintf((char*)USART3_TX_BUF,fmt,ap);
va_end(ap);
i=strlen((const char*)USART3_TX_BUF);//此次发送数据的长度
for(j=0;j<i;j++)//循环发送数据
{
while(USART_GetFlagStatus(USART3,USART_FLAG_TC)==RESET);//等待上次数据传输完成
USART_SendData(USART3,(uint8_t)USART3_TX_BUF[j]);
}
}
#ifndef _UART3_H
#define _UART3_H
//C文件中需要的其他的头文件
#include "sys.h"
#include <stm32f4xx.h>
#define USART3_MAX_RECV_LEN 500
#define USART3_MAX_SEND_LEN 500
#define USART3_RX_EN 1
extern u8 USART3_RX_BUF[USART3_MAX_RECV_LEN];
extern u8 USART3_TX_BUF[USART3_MAX_SEND_LEN];
extern u16 USART3_RX_STA;
void UART3_Config(void);
void TIM7_Int_Init(u16 arr,u16 psc);
void u3_printf(char* fmt, ...);
#endif
要使WiFi模块与手机通信,我的做法是让WiFi模块开启热点并作为TCP服务器,手机作为TCP客户端连接服务器,实现数据的传输。
这里的代码使用 atk_8266_start_trans() 函数初始化WiFi模块,让其工作,这段代码主要作用是给WiFi模块发送各种AT指令。如“AT”用来确认模块是否可正常工作,“AT+RST” 用来重置模块,“AT+CWMODE=2” 用来让模块进入AP模式,就是开启热点,“AT+CWSAP=\"ESP8266-ly\",\"123456789\",11,0” 用于配置热点,“AT+CIPMUX=1” 用于开启多路连接模式,最后“AT+CIPSERVER=1” 用于开启TCP服务器,这样就可以通过WiFi使用TCP协议与TCP客户端也就是手机通信了。
#include "esp8266.h"
void atk_8266_start_trans(void)
{
u8 ret = 0;
delay_ms(1000);
delay_ms(1000);
ret = atk_8266_send_cmd("AT","OK", 100);
if(ret == 0 ) printf("AT成功\n");
else printf("AT fail\n");
delay_ms(1000);
ret = atk_8266_send_cmd ("AT+RST" , NULL ,100);
if(ret == 0 ) printf("AT+RST成功\n");
else printf("AT+RST fail\n");
delay_ms(2000);
ret = atk_8266_send_cmd("AT+CWMODE=2","OK",200);//开启热点
if(ret == 0 ) printf("AT+CWMODE=2\n");
else printf("AT+CWMODE fail\n");
delay_ms(1000);
ret = atk_8266_send_cmd("AT+CWSAP=\"ESP8266-ly\",\"123456789\",11,0","OK",100);//设置热点
if(ret == 0 ) printf("AT+CWSAP成功\n");
else printf("AT+CWSAP fail\n");
delay_ms(1000);
ret = atk_8266_send_cmd("AT+CIPMUX=1","OK",20);//=0:单路连接模式=1:多路连接模式
if(ret == 0 ) printf("AT+CIPMUX=1\n");
else printf("AT+CIPMUX=1 fail\n");
delay_ms(1000);
ret = atk_8266_send_cmd("AT+CIPSERVER=1","OK",200);//启动TCP服务器
if(ret == 0 ) printf("AT+CIPSERVER=1\n");
else printf("AT+CIPSERVER fail\n");
delay_ms(1000);
}
u8 atk_8266_check_cmd(char *str)
{
if(USART3_RX_STA&0x8000)//接收到一次数据
{
USART3_RX_BUF[USART3_RX_STA&0x7fff]=0;//添加结束符
if(strstr((const char*)USART3_RX_BUF,(const char*)str))
return 1;
else
return 0;
}
return 0;
}
//向atk_8266发送命令
//cmd:发送的命令字符串; ack:期待的应答结果,如果为空,则表示不需要等待应答;waittime:等待时间(单位:10ms)
//返回值:0,发送成功(得到了期待的应答结果);1,发送失败
u8 atk_8266_send_cmd(char *cmd, char *ack,u16 waittime)
{
u8 res=0;
USART3_RX_STA=0;
u3_printf("%s\r\n",cmd);//发送命令
if(ack && waittime)//需要等待应答
{
while(--waittime)//等待倒计时
{
delay_ms(100);
if(USART3_RX_STA&0x8000)//接收到期待的应答结果
{
if(atk_8266_check_cmd(ack))
{
printf("ack:%s\r\n",(u8*)ack);
break;//得到有效数据
}
}
USART3_RX_STA=0;
}
if(waittime==0)res=1;
}
return res;
}
//向atk_8266发送数据
//cmd:发送的命令字符串;waittime:等待时间(单位:10ms)
//返回值:发送数据后,服务器的返回验证码
u8* atk_8266_send_data(char *cmd,u16 waittime)
{
char temp[5];
char *ack=temp;
USART3_RX_STA=0;
u3_printf("%s\r\n",cmd);//发送命令
if(waittime)//需要等待应答
{
while(--waittime)//等待倒计时
{
delay_ms(10);
if(USART3_RX_STA&0X8000)//接收到期待的应答结果
{
USART3_RX_BUF[USART3_RX_STA&0X7fff]=0;//添加结束符
ack=(char*)USART3_RX_BUF;
printf("ack:%s\r\n",(u8*)ack);
USART3_RX_STA=0;
break;
}
}
}
return (u8*)ack;
}
#ifndef _ESP8266_H
#define _ESP8266_H
//C文件中需要的其他的头文件
#include <stm32f4xx.h>
#include "sys.h"
#include "delay.h"
#include "uart3.h"
#include "uart.h"
#include "string.h"
#include <stdio.h>
extern char restart[];
extern char cwmode[];
extern char cwlap[];
extern char cwjap[];
extern char cifsr[];
extern char cipmux[];
extern char cipstart[];
extern char cipsend[];
extern char cipserver[];
extern char cwlif[];
extern char cipstatus[];
extern char cipsto[];
extern char cipmode[];
extern char test[];
u8 atk_8266_send_cmd(char *cmd,char *ack,u16 waittime);
u8* atk_8266_send_data(char *cmd,u16 waittime);
u8 atk_8266_check_cmd(char *str);
void atk_8266_start_trans(void);
u8 atk_8266_quit_trans(void);
#endif
使用WiFi模块发送数据,其AT指令为“AT+CIPSEND=0,21”(其中0表示第0个客户端,21表示发送21个字节,所以这句话意思为向第0个客户端发送21个字节的数据),当配置好WiFi模块并发送这一串指令后,WiFi模块便会做出应答,并将我们接下来传给他的数据中的前21个字节发送给第0个客户端。具体代码可以写入主函数,其代码如下:
ret = atk_8266_send_cmd("AT+CIPSEND=0,21",NULL,200);
if(ret == 0 )
{
delay_ms(1000);
ret1 = atk_8266_send_cmd(str, NULL, 200);//str即为要发送给App的数据
if(ret1 == 0 ) printf("SEND OK\n");
else printf("SEND fail\n");
}
else printf("AT+CIPSEND fail\n");
我构建了两个需要相互通信和发送文件的Rails应用程序。例如,一个Rails应用程序会发送请求以查看其他应用程序数据库中的表。然后另一个应用程序将呈现该表的json并将其发回。我还希望一个应用程序将存储在其公共(public)目录中的文本文件发送到另一个应用程序的公共(public)目录。我从来没有做过这样的事情,所以我什至不知道从哪里开始。任何帮助,将不胜感激。谢谢! 最佳答案 无论Rails是什么,几乎所有Web应用程序都有您的要求,大多数现代Web应用程序都需要相互通信。但是有一个小小的理解需要你坚持下去,网站不应直接访问彼此
我是Google云的新手,我正在尝试对其进行首次部署。我的第一个部署是RubyonRails项目。我基本上是在关注thisguideinthegoogleclouddocumentation.唯一的区别是我使用的是我自己的项目,而不是他们提供的“helloworld”项目。这是我的app.yaml文件runtime:customvm:trueentrypoint:bundleexecrackup-p8080-Eproductionconfig.ruresources:cpu:0.5memory_gb:1.3disk_size_gb:10当我转到我的项目目录并运行gcloudprevie
当我在我的Rails应用程序根目录中运行rakedoc:app时,API文档是使用/doc/README_FOR_APP作为主页生成的。我想向该文件添加.rdoc扩展名,以便它在GitHub上正确呈现。更好的是,我想将它移动到应用程序根目录(/README.rdoc)。有没有办法通过修改包含的rake/rdoctask任务在我的Rakefile中执行此操作?是否有某个地方可以查找可以修改的主页文件的名称?还是我必须编写一个新的Rake任务?额外的问题:Rails应用程序的两个单独文件/README和/doc/README_FOR_APP背后的逻辑是什么?为什么不只有一个?
其实做自媒体的成本并不高,入门只需要一部手机即可!在手机上找视频素材、使用手机剪辑视频、最后使用手机发布视频作品获得收益!方法并不难,今天这期内容就来给粉丝们分享一种小方法,每天稳定收益100-300,抓紧点赞收藏!1、找素材(1)使用手机拍摄自己喜欢的经典段落,使用程序把文案内容提取出来(2)也可以在豆瓣、知乎、微博等网站中找一些自己需要的文案素材(3)把文案进行润色修改,可以加入一些自己的观点(4)视频素材可以使用软件中自带的素材,也可以在素材网站中下载完整版的素材2、文案配音(1)把复制好的文案直接导入小程序中(2)调整音色、音调后一键合成音频即可(3)可以选择自己朗读配音,需要花一点时
文章目录1.开发板选择*用到的资源2.串口通信(个人理解)3.代码分析(注释比较详细)1.主函数2.串口1配置3.串口2配置以及中断函数4.注意问题5.源码链接1.开发板选择我用的是STM32F103RCT6的板子,不过代码大概在F103系列的板子上都可以运行,我试过在野火103的霸道板上也可以,主要看一下串口对应的引脚一不一样就行了,不一样的就更改一下。*用到的资源keil5软件这里用到了两个串口资源,采集数据一个,串口通信一个,板子对应引脚如下:串口1,TX:PA9,RX:PA10串口2,TX:PA2,RX:PA32.串口通信(个人理解)我就从串口采集传感器数据这个过程说一下我自己的理解,
我正在使用Postgres.app在OSX(10.8.3)上。我已经修改了我的PATH,以便应用程序的bin文件夹位于所有其他文件夹之前。Rammy:~phrogz$whichpg_config/Applications/Postgres.app/Contents/MacOS/bin/pg_config我已经安装了rvm并且可以毫无错误地安装pggem,但是当我需要它时我得到一个错误:Rammy:~phrogz$gem-v1.8.25Rammy:~phrogz$geminstallpgFetching:pg-0.15.1.gem(100%)Buildingnativeextension
MIMO技术的优缺点优点通过下面三个增益来总体概括:阵列增益。阵列增益是指由于接收机通过对接收信号的相干合并而活得的平均SNR的提高。在发射机不知道信道信息的情况下,MIMO系统可以获得的阵列增益与接收天线数成正比复用增益。在采用空间复用方案的MIMO系统中,可以获得复用增益,即信道容量成倍增加。信道容量的增加与min(Nt,Nr)成正比分集增益。在采用空间分集方案的MIMO系统中,可以获得分集增益,即可靠性性能的改善。分集增益用独立衰落支路数来描述,即分集指数。在使用了空时编码的MIMO系统中,由于接收天线或发射天线之间的间距较远,可认为它们各自的大尺度衰落是相互独立的,因此分布式MIMO
我的测试尝试访问网页并验证页面上是否存在某些元素。例如,它访问http://foo.com/homepage.html并检查Logo图像,然后访问http://bar.com/store/blah.html并检查页面上是否出现了某些文本。我的目标是访问经过Kerberos身份验证的网页。我发现Kerberos代码如下:主文件uri=URI.parse(Capybara.app_host)kerberos=Kerberos.new(uri.host)@kerberos_token=kerberos.encoded_tokenkerberos.rb文件classKerberosdefini
LL库和HAL库简介LL:Low-Layer,底层库HAL:HardwareAbstractionLayer,硬件抽象层库LL库和hal库对比,很精简,这实际上是一个精简的库。LL库的配置选择如下:在STM32CUBEMX中,点击菜单的“ProjectManager”–>“AdvancedSettings”,在下面的界面中选择“AdvancedSettings”,然后在每个模块后面选择使用的库总结:1、如果使用的MCU是小容量的,那么STM32CubeLL将是最佳选择;2、如果结合可移植性和优化,使用STM32CubeHAL并使用特定的优化实现替换一些调用,可保持最大的可移植性。另外HAL和L
我想在Rails中使用插件系统创建一个应用程序。潜在用户应该能够上传(或更好地从存储库安装)一个插件并安装它,使我的应用程序能够做更多的事情。这应该在没有FTP/SSH/对服务器的任何低级别访问的情况下完成。关于如何在Rails3中完成它,是否有任何好的gems或教程? 最佳答案 你看过http://edgeguides.rubyonrails.org/plugins.html了吗??它似乎不是100%兼容Rails3,但它可以帮助您入门。我看过的大多数插件文章都涉及Rails2。 关于