文章目录
我用的是STM32F103RCT6的板子,不过代码大概在F103系列的板子上都可以运行,我试过在野火103的霸道板上也可以,主要看一下串口对应的引脚一不一样就行了,不一样的就更改一下。
keil5软件
这里用到了两个串口资源,采集数据一个,串口通信一个,板子对应引脚如下:
串口 1,TX:PA9,RX:PA10
串口 2,TX:PA2,RX:PA3
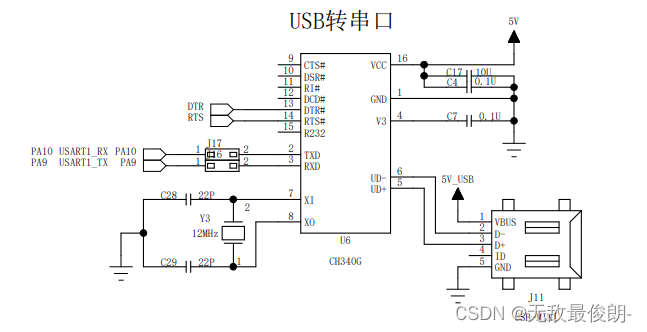
我就从串口采集传感器数据这个过程说一下我自己的理解,两个串口相当于两个通道,一般开发板上会有一个默认串口来作为串口通信的通道,参考你板子上的USB转串口原理图,看它连接的是哪个串口,一般都是串口一,这个是指板子与电脑串口助手之间的通道,他俩之间也只有这一个通道,其它的串口通道不可以直接通到串口助手,所以我们一般用另一个串口来采集数据,采集完数据后再通过默认串口将数据发送到串口助手,这样就可以在串口助手上打印采集的数据了。(个人理解)
一些配置文件就不说了,这里主要分析一下串口、中断等
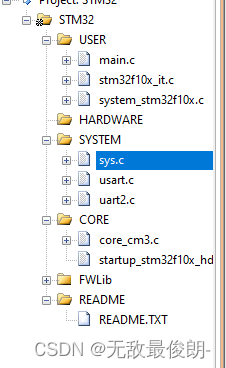
这主要是我的这个工程的文件夹设置,主要的就是两个串口和主函数。
#include "stm32f10x.h"
#include "sys.h" //延时文件
#include "uart2.h" //串口二配置,用于采集传感器
#include "usart.h" //串口一配置,用于与串口助手通信
int main(void)
{
SysTick_Init();//延时函数初始化,可以根据你的代码来,延时功能正常就行
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置中断优先级分组为组2:2位抢占优先级,2位响应优先级,优先级具体怎么设置我还没搞懂,但 对于目前只有一个中断来说,应该无所谓
uart1_init(9600); //串口1初始化为9600 ,与串口助手相同即可
uart2_init(9600); //串口2初始化为9600 ,按照用到的传感器进行匹配设置
while(1)
{
Delay_us(2000000);//两秒输出一次数据
}
}
#include "stm32f10x.h"
#include "usart.h"
#include "sys.h"
//加入以下代码,支持printf函数,printf函数就是可以通过串口1直接打印在串口助手上,需要加上下面的代码
#if 1
#pragma import(__use_no_semihosting)
//标准库需要的支持函数
struct __FILE
{
int handle;
};
FILE __stdout;
//定义_sys_exit()以避免使用半主机模式
_sys_exit(int x)
{
x = x;
}
//重定义fputc函数
int fputc(int ch,FILE *f)
{
USART1->SR; //USART_GetFlagStatus(USART1, USART_FLAG_TC) 解决第一个字符发送失败的问题
//一个一个发送字符
USART_SendData(USART1, (unsigned char) ch);
//等待发送完成
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)!=SET);
return(ch);
}
#endif
//功能:串口1初始化
void uart1_init(u32 bound) //初始化串口1,函数的参数是波特率
{
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE); //使 能USART1,GPIOA时钟
//USART1_TX GPIOA.9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.9
//USART1_RX GPIOA.10初始化
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;//PA10
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.10
//USART 初始化设置
USART_InitStructure.USART_BaudRate = bound;//串口波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART1, &USART_InitStructure); //初始化串口1
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启串口接受中断
USART_Cmd(USART1, ENABLE); //使能串口1
}
#include "stm32f10x.h"
#include "uart2.h"
#include "sys.h"
#include "usart.h"
//
//加入以下代码,支持printf函数,应该也可以不加了,串口一已经加了
#if 1
#pragma import(__use_no_semihosting)
//标准库需要的支持函数
struct __FILE
{
int handle;
};
#endif
void uart2_init(u32 bound) //初始化串口2,函数的参数是波特率
{
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);//使能GPIOA时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2,ENABLE);//使能USART2时钟
//USART_DeInit(USART2); //复位串口2
//USART2_TX GPIOA.2
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2; //PA.2
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.2
//USART2_RX GPIOA.3初始化
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;//PA3
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.3
//Usart2 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
//USART2 初始化设置
USART_InitStructure.USART_BaudRate = bound;//串口波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART2, &USART_InitStructure); //初始化串口2
USART_ITConfig(USART2, USART_IT_RXNE, ENABLE);//开启串口接受中断
USART_Cmd(USART2, ENABLE); //使能串口2
}
//功能:串口2中断服务程序,接收到数据会进入这个函数
//参数:无
//返回:无
u8 USART_RX_BUF[9];//定义接收数组,看传感器返回的有多少字节数据
u8 USART_RX_STA=0;//数组标志位,如第0位、第一位
static char start=0; //开始接收数据标志位
void USART2_IRQHandler(void)
{
u8 Res=0;//定义一个数来接收每次读取的数据
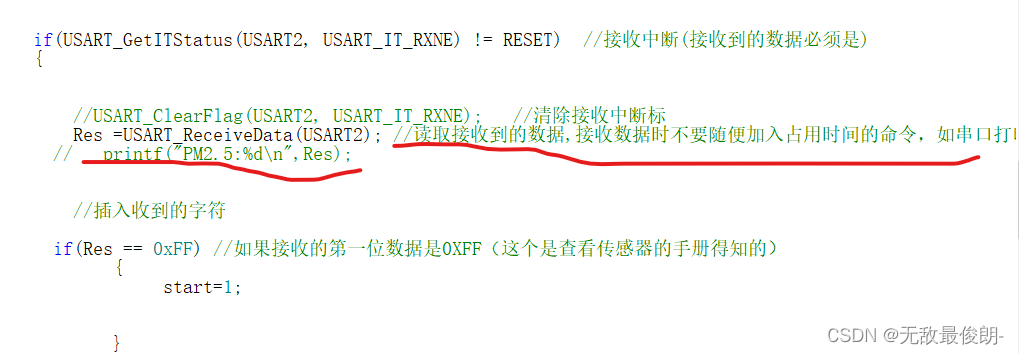
if(USART_GetITStatus(USART2, USART_IT_RXNE) != RESET) //接收中断,每一个字节都会中断一次
{
Res =USART_ReceiveData(USART2); //读取接收到的字节数据
//接收数据时不要随便加入占用时间的命令,如串口打印,会影响下面数据字节的接收
if(Res == 0xFF) //如果接收的第一位数据是0XFF(这个是查看传感器的手册得知的,这里相当于进行校验)
{
start=1; //开始接收数据标志位,一旦第一个接收正确,就就继续向下接收
}
if(start== 1)
{
USART_RX_BUF[USART_RX_STA] = Res ; //把接收到的数据存到数组里面
USART_RX_STA++;//数组标志位加1
if(USART_RX_STA >= 9 && (USART_RX_BUF[1]==0x86))//这里还校验了接收的第二个数据
{
printf("PM2.5:%d\n",USART_RX_BUF[4]);//通过串口1打印接收数组里的数据
USART_RX_STA=0;//重新开始接收
USART_RX_BUF[0] = 0;
start=0;
}
}
}
}
代码实现,这样就基本实现传感器数据采集功能了,其他的头文件啥的自己添加就行了
*路径添加,头文件都是要添加路径的,有时候添加了还会报错,就先把路径删了,代码部分也删了,再添加路径,再写include“ .h”,我的是这样解决的,这是keil的问题
*第二个就是在中断函数的地方,在字节与字节接收之间不要加其它占用时间的命令,如使用printf函数打印,这样可能会导致数据接收不完整,在整条数据接收完成后再执行打印命令,这里需要特别注意一下
链接: https://pan.baidu.com/s/1DJ-Bx3KFoaLm6EDi09dAkg
提取码: pjrq
我正在寻找执行以下操作的正确语法(在Perl、Shell或Ruby中):#variabletoaccessthedatalinesappendedasafileEND_OF_SCRIPT_MARKERrawdatastartshereanditcontinues. 最佳答案 Perl用__DATA__做这个:#!/usr/bin/perlusestrict;usewarnings;while(){print;}__DATA__Texttoprintgoeshere 关于ruby-如何将脚
好的,所以我的目标是轻松地将一些数据保存到磁盘以备后用。您如何简单地写入然后读取一个对象?所以如果我有一个简单的类classCattr_accessor:a,:bdefinitialize(a,b)@a,@b=a,bendend所以如果我从中非常快地制作一个objobj=C.new("foo","bar")#justgaveitsomerandomvalues然后我可以把它变成一个kindaidstring=obj.to_s#whichreturns""我终于可以将此字符串打印到文件或其他内容中。我的问题是,我该如何再次将这个id变回一个对象?我知道我可以自己挑选信息并制作一个接受该信
无论您是想搭建桌面端、WEB端或者移动端APP应用,HOOPSPlatform组件都可以为您提供弹性的3D集成架构,同时,由工业领域3D技术专家组成的HOOPS技术团队也能为您提供技术支持服务。如果您的客户期望有一种在多个平台(桌面/WEB/APP,而且某些客户端是“瘦”客户端)快速、方便地将数据接入到3D应用系统的解决方案,并且当访问数据时,在各个平台上的性能和用户体验保持一致,HOOPSPlatform将帮助您完成。利用HOOPSPlatform,您可以开发在任何环境下的3D基础应用架构。HOOPSPlatform可以帮您打造3D创新型产品,HOOPSSDK包含的技术有:快速且准确的CAD
我想解析一个已经存在的.mid文件,改变它的乐器,例如从“acousticgrandpiano”到“violin”,然后将它保存回去或作为另一个.mid文件。根据我在文档中看到的内容,该乐器通过program_change或patch_change指令进行了更改,但我找不到任何在已经存在的MIDI文件中执行此操作的库.他们似乎都只支持从头开始创建的MIDI文件。 最佳答案 MIDIpackage会为您完成此操作,但具体方法取决于midi文件的原始内容。一个MIDI文件由一个或多个音轨组成,每个音轨是十六个channel中任何一个上的
文章目录1.开发板选择*用到的资源2.串口通信(个人理解)3.代码分析(注释比较详细)1.主函数2.串口1配置3.串口2配置以及中断函数4.注意问题5.源码链接1.开发板选择我用的是STM32F103RCT6的板子,不过代码大概在F103系列的板子上都可以运行,我试过在野火103的霸道板上也可以,主要看一下串口对应的引脚一不一样就行了,不一样的就更改一下。*用到的资源keil5软件这里用到了两个串口资源,采集数据一个,串口通信一个,板子对应引脚如下:串口1,TX:PA9,RX:PA10串口2,TX:PA2,RX:PA32.串口通信(个人理解)我就从串口采集传感器数据这个过程说一下我自己的理解,
s=Socket.new(Socket::AF_INET,Socket::SOCK_STREAM,0)s.connect(Socket.pack_sockaddr_in('port','hostname'))ssl=OpenSSL::SSL::SSLSocket.new(s,sslcert)ssl.connect从这里开始,如果ssl连接和底层套接字仍然是ESTABLISHED,或者它是否在默认值7200之后进入CLOSE_WAIT,我想检查一个线程几秒钟甚至更糟的是在实际上不需要.write()或.read()的情况下关闭。是用select()、IO.select()还是其他方法完成
在Ruby1.9中,我如何从ARGF中读取CSV?我尝试了以下方法,但没有打印任何内容:require'csv'CSV(ARGF).readdo|row|prowendhttp://www.ruby-doc.org/core-1.9.3/ARGF.htmlhttp://ruby-doc.org/stdlib-1.9.2/libdoc/csv/rdoc/CSV.html 最佳答案 如果你想偷懒你可以试试:CSV.new(ARGF.file).eachdo|row|...end来源:http://www.ruby-doc.org/std
我正在编写一个ruby程序,它应该执行另一个程序,通过stdin向它传递值,从它的stdout读取响应,然后打印响应。这是我目前所拥有的。#!/usr/bin/envrubyrequire'open3'stdin,stdout,stderr=Open3.popen3('./MyProgram')stdin.puts"helloworld!"output=stdout.readerrors=stderr.readstdin.closestdout.closestderr.closeputs"Output:"puts"-------"putsoutputputs"\nErrors:"p
我们如何从ruby脚本返回值?#!/usr/bin/envrubya="test"a我们如何在Ubuntu终端或java或c中访问'a'的值? 最佳答案 在ruby/python脚本中打印你的变量,然后可以通过示例从shell脚本中读取它:#!/bin/bashruby_var=$(rubymyrubyscript.rb)python_var=$(pythonmypythonscript.py)echo"$ruby_var"echo"$python_var"注意你的ruby/python脚本只打印这个变量(有更多复杂的方
有没有办法将RubyVM::InstructionSequence存储到文件中并稍后读取?我尝试了Marshal.dump但没有成功。我收到以下错误:`dump':no_dump_dataisdefinedforclassRubyVM::InstructionSequence(TypeError) 最佳答案 是的,有办法。首先,您需要使InstructionSequence的load方法可访问,默认情况下该方法是禁用的:require'fiddle'classRubyVM::InstructionSequence#RetrieveR