编程即对这本电子书进行编辑:
读取数据:可以从指定位置开始一直读完这本书。
写入数据:一次最多只能写一页256个字,不能翻页写,需要等待上一页写完才能翻页。写入数据前需要保证写入的位置是擦除状态,才能正确写入数据,因为只能1写成0,不能0写成1。
擦除操作:有几种选择,可以每个小节、半个章节、整个章节、一本书进行擦除。
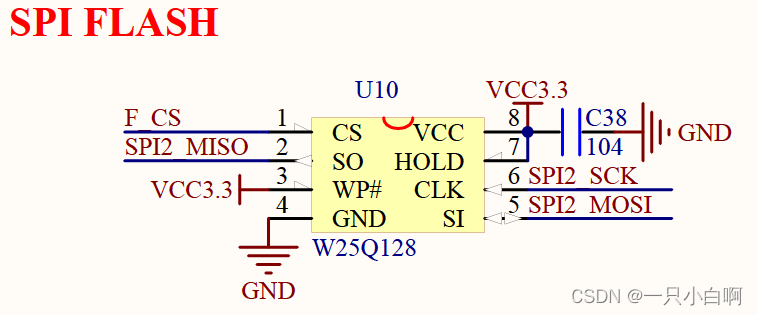
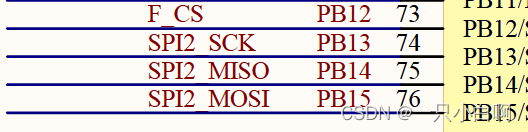
我用到的是ALIENTEK战舰STM32F1 V3开发板,关于W25Q128硬件连接如下图:
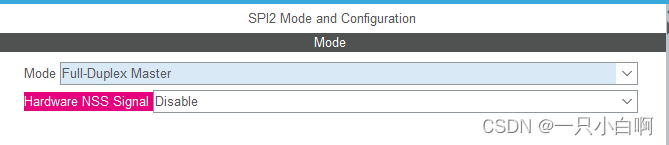
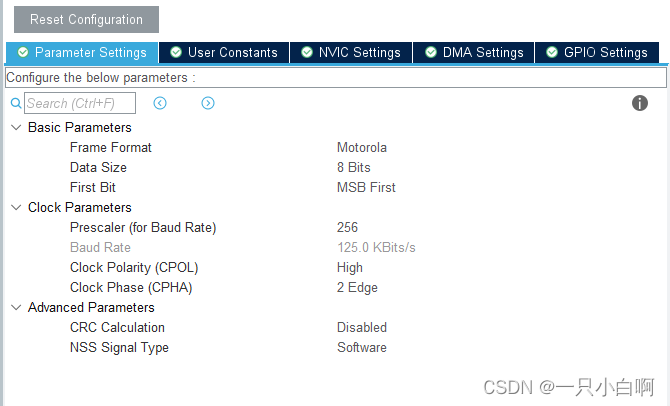
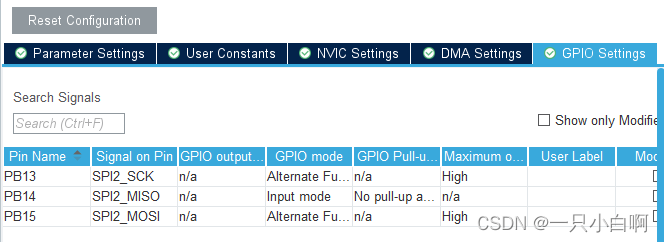
配置好之后生成代码就行了,然后再自己编辑一个驱动测试的c文件。
| 指令 | 名称 | 解释 |
| 02h | Page Program | 页编程,在一页上写字 |
| 03h | Read Data | 读取数据 |
| 05h | Read Status Register | 读取寄存器状态 |
| 06h | Write Enable | 将状态寄存器中的写启用闩锁(WEL)位设置为1。 |
| 20h | Sector Erase | 扇区擦除 |
| C7h/60h | Chip Erase | 整个芯片擦除 |
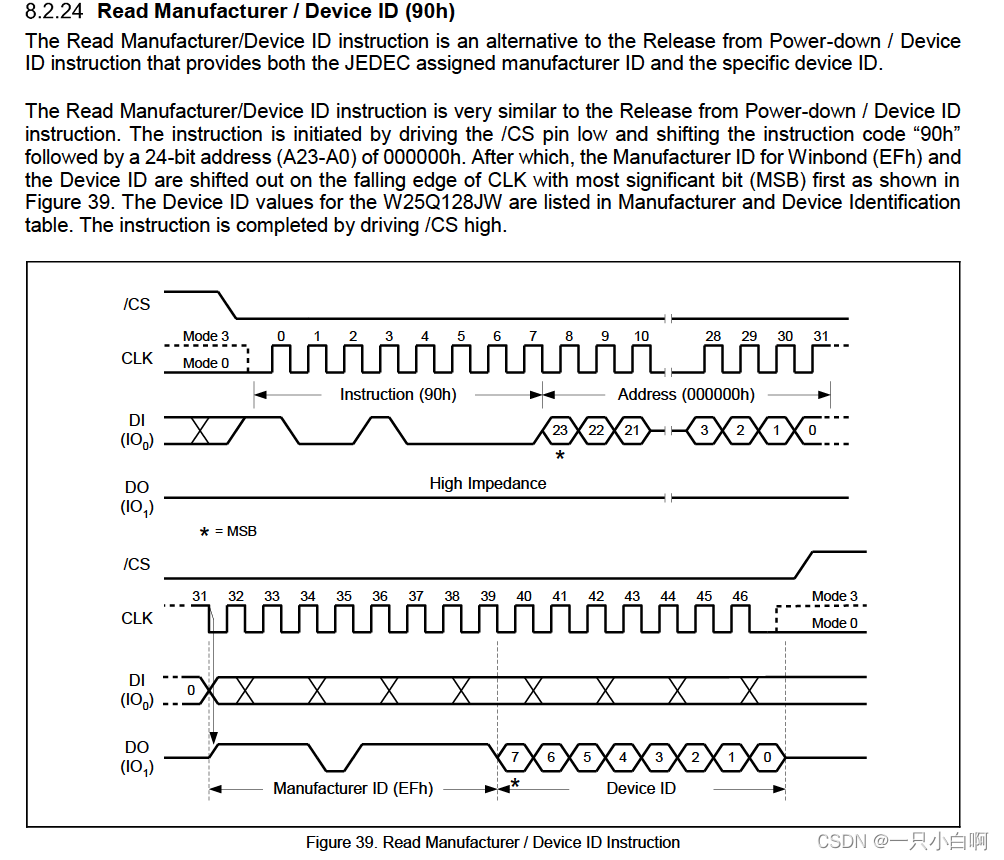
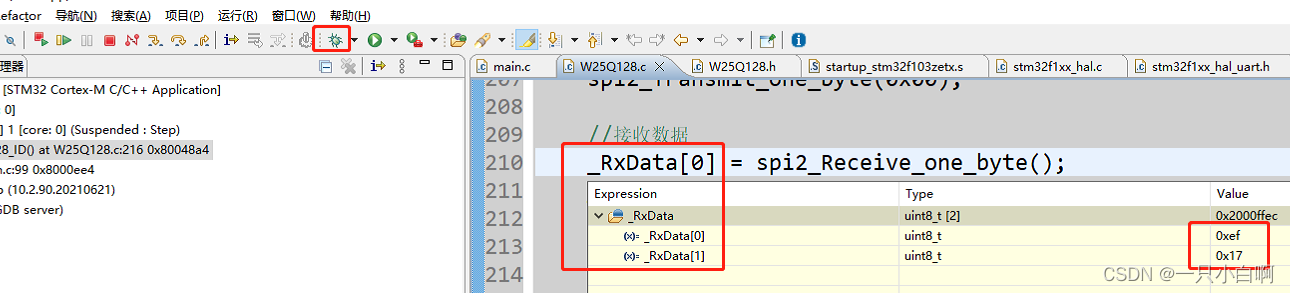
读取设备ID指令根据数据手册,发送0X90+24位地址之后,就可以接收到0XEF + ID,W25Q128的ID为0X17。read_W25Q128_ID()函数可以通过串口打印ID,或者通过单步调试Debug直接查看读到的ID值。
可以理解为MCU向W25Q128发送命令0x90 0x00 0x00 0x00 ,然后就可以接收到W25Q128的两个字节 0xEF 0x17
// 读取 ID 测试 OK 0xEF 0X17
void read_W25Q128_ID()
{
uint8_t _RxData[2]={0x00};
W25Q128_Enable();
//发送指令
spi2_Transmit_one_byte(0x90);
spi2_Transmit_one_byte(0x00);
spi2_Transmit_one_byte(0x00);
spi2_Transmit_one_byte(0x00);
//接收数据
_RxData[0] = spi2_Receive_one_byte();
_RxData[1] = spi2_Receive_one_byte();
W25Q128_Disable();
printf("%s\r\n",_RxData); //串口打印 ID
}
读、写、擦除操作的24位地址取值范围是0-16777216,因为读可以从指定地址一直读到最后,而写,一次最多写一页,擦除的最小单位为一个扇区4096个字即16页,当然也可以一不做二不休整个芯片擦除,这个擦除时间比较长十几秒,因为是自学,所以总得做点什么。比如:
1、写10个数,卡在第一页和第二页之间,即第一页写5个数第二页写5个数。
2、写10个数,卡在第一个扇区和第二个扇区之间,即第255页写5个数第256页写5个 数。
问题点:第一个问题,就要考虑翻页写的问题,第二个问题就要考虑擦除两个扇区和翻页写的问题。
解决思路:
1、通过地址定位到当页还剩下多少个字可以写,通过要写字的个数,分为几次写,写完当页后再翻页写到下一页,直到写完。相关函数:
Write_Page() Write_Word()
2、因为要先进行擦除,然后再写数据,才能保证写入数据的准确性,可以直接擦除整个芯片,要想时间最快,擦除部分应该是最小的,所以选择擦除扇区。通过地址和要写字的个数,就可以判断,要写的地方在哪几个扇区,然后执行擦除即可。相关函数:
Erase_Write_data_Sector() Erase_one_Sector()
W25Q28.c文件
#include "W25Q128.h"
#include "spi.h"
#include "usart.h"
#include <stdio.h>
uint32_t FLASH_SIZE=16*1024*1024; //FLASH 大小为16M字节
uint32_t Data_Address = 4090; //测试地址 250(地址在两页之间) 和 4090 (地址在两扇区并且两页之间)
//要写的数据
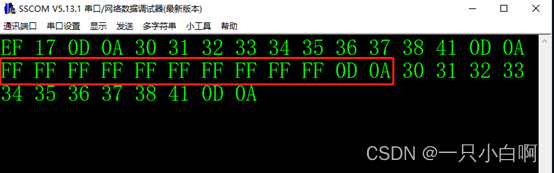
uint8_t Write_data[]={0x30,0x31,0x32,0x33,0x34,0x35,0x36,0x37,0x38,0x41};
#define Write_data_SIZE sizeof(Write_data)
//要读的数据
uint8_t Read_data[100] = {0};
#define Read_data_SIZE sizeof(Read_data)
/* Nicky ******************************************************************* */
//器件使能
void W25Q128_Enable()
{
HAL_GPIO_WritePin(SPI_CS_GPIO_Port, SPI_CS_Pin, RESET); // Chip select
}
/* Nicky ******************************************************************* */
//器件失能
void W25Q128_Disable()
{
HAL_GPIO_WritePin(SPI_CS_GPIO_Port, SPI_CS_Pin, SET); // Chip disselect
}
/* Nicky ******************************************************************* */
//SPI2 发送 1 个字节数据
void spi2_Transmit_one_byte(uint8_t _dataTx)
{
HAL_SPI_Transmit(&hspi2,(uint8_t*) &_dataTx,1,HAL_MAX_DELAY);
}
/* Nicky ******************************************************************* */
//SPI2 接收 1 个字节数据
uint8_t spi2_Receive_one_byte()
{
uint16_t _dataRx;
HAL_SPI_Receive(&hspi2,(uint8_t*) &_dataRx, 1, HAL_MAX_DELAY);
return _dataRx;
}
/* Nicky ******************************************************************* */
//W25Q128写使能,将WEL置1
void W25Q128_Write_Enable()
{
W25Q128_Enable(); //使能器件
spi2_Transmit_one_byte(0x06);
W25Q128_Disable(); //取消片选
}
/* Nicky ******************************************************************* */
//W25Q128写失能,将WEL置0
void W25Q128_Write_Disable()
{
W25Q128_Enable(); //使能器件
spi2_Transmit_one_byte(0x04);
W25Q128_Disable(); //取消片选
}
/* Nicky ******************************************************************* */
//读取寄存器状态
uint8_t W25Q128_ReadSR(void)
{
uint8_t byte=0;
W25Q128_Enable(); //使能器件
spi2_Transmit_one_byte(0x05); //发送读取状态寄存器命令
byte=spi2_Receive_one_byte(); //读取一个字节
W25Q128_Disable(); //取消片选
return byte;
}
/* Nicky ******************************************************************* */
//等待空闲
void W25Q128_Wait_Busy()
{
while((W25Q128_ReadSR()&0x01)==0x01); // 等待BUSY位清空
}
/* Nicky ******************************************************************* */
//擦除地址所在的一个扇区
void Erase_one_Sector(uint32_t Address)
{
W25Q128_Write_Enable(); //SET WEL
W25Q128_Wait_Busy();
W25Q128_Enable(); //使能器件
spi2_Transmit_one_byte(0x20); //发送扇区擦除指令
spi2_Transmit_one_byte((uint8_t)((Address)>>16)); //发送24bit地址
spi2_Transmit_one_byte((uint8_t)((Address)>>8));
spi2_Transmit_one_byte((uint8_t)Address);
W25Q128_Disable(); //取消片选
W25Q128_Wait_Busy(); //等待擦除完成
}
/* Nicky ******************************************************************* */
//擦除地址所在的扇区
void Erase_Write_data_Sector(uint32_t Address,uint32_t Write_data_NUM)
{
//总共4096个扇区
//计算 写入数据开始的地址 + 要写入数据个数的最后地址 所处的扇区
uint16_t Star_Sector,End_Sector,Num_Sector;
Star_Sector = Address / 4096; //数据写入开始的扇区
End_Sector = (Address + Write_data_NUM) / 4096; //数据写入结束的扇区
Num_Sector = End_Sector - Star_Sector; //数据写入跨几个扇区
//开始擦除扇区
for(uint16_t i=0;i <= Num_Sector;i++)
{
Erase_one_Sector(Address);
Address += 4095;
}
}
/* Nicky ******************************************************************* */
//擦除整个芯片 等待时间超长... 10-20S
void Erase_W25Q128_Chip(void)
{
W25Q128_Write_Enable(); //SET WEL
W25Q128_Wait_Busy();
W25Q128_Enable(); //使能器件
spi2_Transmit_one_byte(0x60); //发送片擦除命令
W25Q128_Disable(); //取消片选
W25Q128_Wait_Busy(); //等待芯片擦除结束
}
/* Nicky ******************************************************************* */
//读取W25Q128数据
void Read_W25Q128_data(uint8_t* pBuffer,uint32_t ReadAddr,uint16_t NumByteToRead)
{
uint16_t i=0;
W25Q128_Enable(); //使能器件
spi2_Transmit_one_byte(0x03); //发送读取命令
spi2_Transmit_one_byte((uint8_t)((ReadAddr)>>16)); //发送24bit地址
spi2_Transmit_one_byte((uint8_t)((ReadAddr)>>8));
spi2_Transmit_one_byte((uint8_t)ReadAddr);
for(;i<NumByteToRead;i++)
{
pBuffer[i]=spi2_Receive_one_byte(); //循环读数
}
W25Q128_Disable();
}
/* Nicky ******************************************************************* */
//写字,一次最多一页
void Write_Word(uint8_t* pBuffer, uint32_t WriteAddr, uint16_t NumByteToWrite)
{
uint16_t i;
W25Q128_Write_Enable(); //SET WEL
W25Q128_Enable(); //使能器件
spi2_Transmit_one_byte(0x02);
spi2_Transmit_one_byte((uint8_t)((WriteAddr) >> 16)); //写入的目标地址
spi2_Transmit_one_byte((uint8_t)((WriteAddr) >> 8));
spi2_Transmit_one_byte((uint8_t)WriteAddr);
for (i = 0; i < NumByteToWrite; i++)
spi2_Transmit_one_byte(pBuffer[i]);//循环写入字节数据
W25Q128_Disable();
W25Q128_Wait_Busy(); //写完之后需要等待芯片操作完。
}
/* Nicky ******************************************************************* */
//定位到页
void Write_Page(uint8_t* pBuffer,uint32_t WriteAddr,uint16_t NumByteToWrite)
{
uint16_t Word_remain;
Word_remain=256-WriteAddr%256; //定位页剩余的字数
if(NumByteToWrite <= Word_remain)
Word_remain=NumByteToWrite; //定位页能一次写完
while(1)
{
Write_Word(pBuffer,WriteAddr,Word_remain);
if(NumByteToWrite==Word_remain)
{
break; //判断写完就 break
}
else //没写完,翻页了
{
pBuffer += Word_remain; //直针后移当页已写字数
WriteAddr += Word_remain;
NumByteToWrite -= Word_remain; //减去已经写入了的字数
if(NumByteToWrite>256)
Word_remain=256; //一次可以写入256个字
else
Word_remain=NumByteToWrite; //不够256个字了
}
}
}
/* Nicky ******************************************************************* */
// 读取 ID 测试 OK 0xEF 0X17
void read_W25Q128_ID()
{
uint8_t _RxData[2]={0x00};
W25Q128_Enable();
//发送指令
spi2_Transmit_one_byte(0x90);
spi2_Transmit_one_byte(0x00);
spi2_Transmit_one_byte(0x00);
spi2_Transmit_one_byte(0x00);
//接收数据
_RxData[0] = spi2_Receive_one_byte();
_RxData[1] = spi2_Receive_one_byte();
W25Q128_Disable();
printf("%s\r\n",_RxData); //串口打印 ID
}
/* Nicky ******************************************************************* */
//测试程序
void W25Q128_test()
{
//读数据,看原始存在的数据
Read_W25Q128_data(Read_data,Data_Address,Read_data_SIZE);
for(uint8_t i=0;i<Write_data_SIZE;i++)
printf("%c",Read_data[i]);
printf("\r\n");
//擦除需要写数据所在的扇区
Erase_Write_data_Sector(Data_Address,Write_data_SIZE);
Read_W25Q128_data(Read_data,Data_Address,Read_data_SIZE);
for(uint8_t i=0;i<Write_data_SIZE;i++)
printf("%c",Read_data[i]);
printf("\r\n");
//写数据
Write_Page(Write_data,Data_Address,Write_data_SIZE);
Read_W25Q128_data(Read_data,Data_Address,Read_data_SIZE);
//串口打印数据
for(uint8_t i=0;i<Write_data_SIZE;i++)
printf("%c",Read_data[i]);
printf("\r\n");
}
W25Q28.h文件
#include "main.h"
void read_W25Q128_ID();
void W25Q128_test();中间为擦除后读取的数据。
按照目前的情况,这个问题不适合我们的问答形式。我们希望答案得到事实、引用或专业知识的支持,但这个问题可能会引发辩论、争论、投票或扩展讨论。如果您觉得这个问题可以改进并可能重新打开,visitthehelpcenter指导。关闭10年前。问题1)我想知道rubyonrails是否有功能类似于primefaces的gem。我问的原因是如果您使用primefaces(http://www.primefaces.org/showcase-labs/ui/home.jsf),开发人员无需担心javascript或jquery的东西。据我所知,JSF是一个规范,基于规范的各种可用实现,prim
本教程将在Unity3D中混合Optitrack与数据手套的数据流,在人体运动的基础上,添加双手手指部分的运动。双手手背的角度仍由Optitrack提供,数据手套提供双手手指的角度。 01 客户端软件分别安装MotiveBody与MotionVenus并校准人体与数据手套。MotiveBodyMotionVenus数据手套使用、校准流程参照:https://gitee.com/foheart_1/foheart-h1-data-summary.git02 数据转发打开MotiveBody软件的Streaming,开始向Unity3D广播数据;MotionVenus中设置->选项选择Unit
文章目录1.开发板选择*用到的资源2.串口通信(个人理解)3.代码分析(注释比较详细)1.主函数2.串口1配置3.串口2配置以及中断函数4.注意问题5.源码链接1.开发板选择我用的是STM32F103RCT6的板子,不过代码大概在F103系列的板子上都可以运行,我试过在野火103的霸道板上也可以,主要看一下串口对应的引脚一不一样就行了,不一样的就更改一下。*用到的资源keil5软件这里用到了两个串口资源,采集数据一个,串口通信一个,板子对应引脚如下:串口1,TX:PA9,RX:PA10串口2,TX:PA2,RX:PA32.串口通信(个人理解)我就从串口采集传感器数据这个过程说一下我自己的理解,
我在Rails中有一个具有以下方法的应用程序,该方法可以加密和解密文本并与Java客户端通信。defencrypt(string,key)cipher=OpenSSL::Cipher::AES.new(128,:CBC)cipher.encryptcipher.padding=1cipher.key=hex_to_bin(Digest::SHA1.hexdigest(key)[0..32])cipher_text=cipher.update(string)cipher_textexcenddefhex_to_bin(str)[str].pack"H*"enddefbin_to_hex(
LL库和HAL库简介LL:Low-Layer,底层库HAL:HardwareAbstractionLayer,硬件抽象层库LL库和hal库对比,很精简,这实际上是一个精简的库。LL库的配置选择如下:在STM32CUBEMX中,点击菜单的“ProjectManager”–>“AdvancedSettings”,在下面的界面中选择“AdvancedSettings”,然后在每个模块后面选择使用的库总结:1、如果使用的MCU是小容量的,那么STM32CubeLL将是最佳选择;2、如果结合可移植性和优化,使用STM32CubeHAL并使用特定的优化实现替换一些调用,可保持最大的可移植性。另外HAL和L
我使用的是最新版本的Chrome(32.0.1700.107)和Chrome驱动程序(V2.8)。但是当我在Ruby中使用以下代码运行示例测试时:require'selenium-webdriver'WAIT=Selenium::WebDriver::Wait.new(timeout:100)$driver=Selenium::WebDriver.for:chrome$driver.manage.window.maximize$driver.navigate.to'https://www.google.co.in'defapps_hoverele_hover=$driver.find_
按照目前的情况,这个问题不适合我们的问答形式。我们希望答案得到事实、引用或专业知识的支持,但这个问题可能会引发辩论、争论、投票或扩展讨论。如果您觉得这个问题可以改进并可能重新打开,visitthehelpcenter指导。关闭9年前。多年来,我一直在使用多种语言进行编程,并且认为自己总体上相当擅长。但是,我从未编写过任何自动化测试:没有单元测试,没有TDD,没有BDD,什么都没有。我已经尝试开始为我的项目编写适当的测试套件。我可以看到在进行任何更改后能够自动测试项目中所有代码的理论值(value)。我可以看到像RSpec和Mocha这样的测试框架应该如何使设置和运行所述测试变得相当容易
如果我在功能规范中调用url_for,它会返回一个以http://www.example.com/开头的绝对URL.Capybara会很乐意尝试加载该站点上的页面,但这与我的应用程序无关。以下是重现该问题的最少步骤:从这个Gemfile开始:source'https://rubygems.org'gem"sqlite3"gem"jquery-rails"gem"draper"gem"rails",'4.1.0'gem"therubyracer"gem"uglifier"gem"rspec-rails"gem"capybara"gem"poltergeist"gem"launchy"运行
在笔者前面有一篇文章《驱动开发:断链隐藏驱动程序自身》通过摘除驱动的链表实现了断链隐藏自身的目的,但此方法恢复时会触发PG会蓝屏,偶然间在网上找到了一个作者介绍的一种方法,觉得有必要详细分析一下他是如何实现的进程隐藏的,总体来说作者的思路是最终寻找到MiProcessLoaderEntry的入口地址,该函数的作用是将驱动信息加入链表和移除链表,运用这个函数即可动态处理驱动的添加和移除问题。MiProcessLoaderEntry(pDriverObject->DriverSection,1)添加MiProcessLoaderEntry(pDriverObject->DriverSection,
目录一、ESP32简单介绍二、ESP32Wi-Fi模块介绍三、ESP32Wi-Fi编程模型四、ESP32Wi-Fi事件处理流程 五、ESP32Wi-Fi开发环境六、ESP32Wi-Fi具体代码七、ESP32Wi-Fi代码解读6.1主程序app_main7.2自定义代码wifi_init_sta()八、ESP32Wi-Fi连接验证8.1测试方法8.2服务器模拟工具sscom58.3测试代码8.4测试结果前言为了开发一款亚马逊物联网产品,开始入手ESP32模块。为了能够记录自己的学习过程,特记录如下操作过程。一、ESP32简单介绍ESP32是一套Wi-Fi(2.4GHz)和蓝牙(4.2)双模解决方