IPL:启动区,启动程序装载器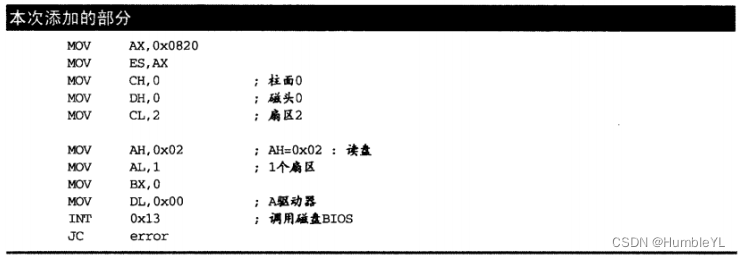
完整代码:
; haribote-ipl
; TAB=4
CYLS EQU 10 ; 声明CYLS=10
ORG 0x7c00 ; 指明程序装载地址
; 标准FAT12格式软盘专用的代码 Stand FAT12 format floppy code
JMP entry
DB 0x90
DB "HARIBOTE" ; 启动扇区名称(8字节)
DW 512 ; 每个扇区(sector)大小(必须512字节)
DB 1 ; 簇(cluster)大小(必须为1个扇区)
DW 1 ; FAT起始位置(一般为第一个扇区)
DB 2 ; FAT个数(必须为2)
DW 224 ; 根目录大小(一般为224项)
DW 2880 ; 该磁盘大小(必须为2880扇区1440*1024/512)
DB 0xf0 ; 磁盘类型(必须为0xf0)
DW 9 ; FAT的长度(必??9扇区)
DW 18 ; 一个磁道(track)有几个扇区(必须为18)
DW 2 ; 磁头数(必??2)
DD 0 ; 不使用分区,必须是0
DD 2880 ; 重写一次磁盘大小
DB 0,0,0x29 ; 意义不明(固定)
DD 0xffffffff ; (可能是)卷标号码
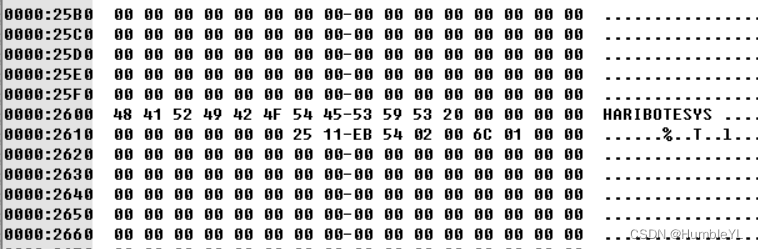
DB "HARIBOTEOS " ; 磁盘的名称(必须为11字?,不足填空格)
DB "FAT12 " ; 磁盘格式名称(必??8字?,不足填空格)
RESB 18 ; 先空出18字节
; 程序主体
entry:
MOV AX,0 ; 初始化寄存器
MOV SS,AX
MOV SP,0x7c00
MOV DS,AX
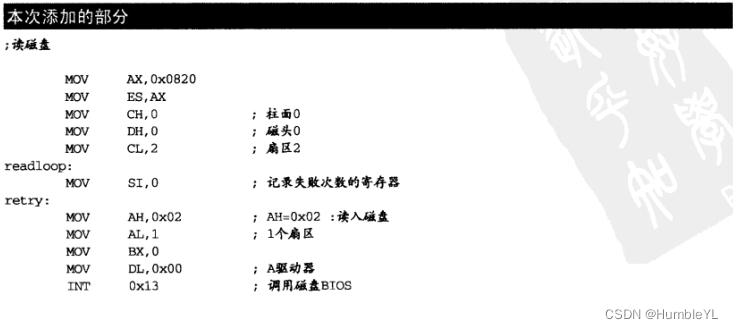
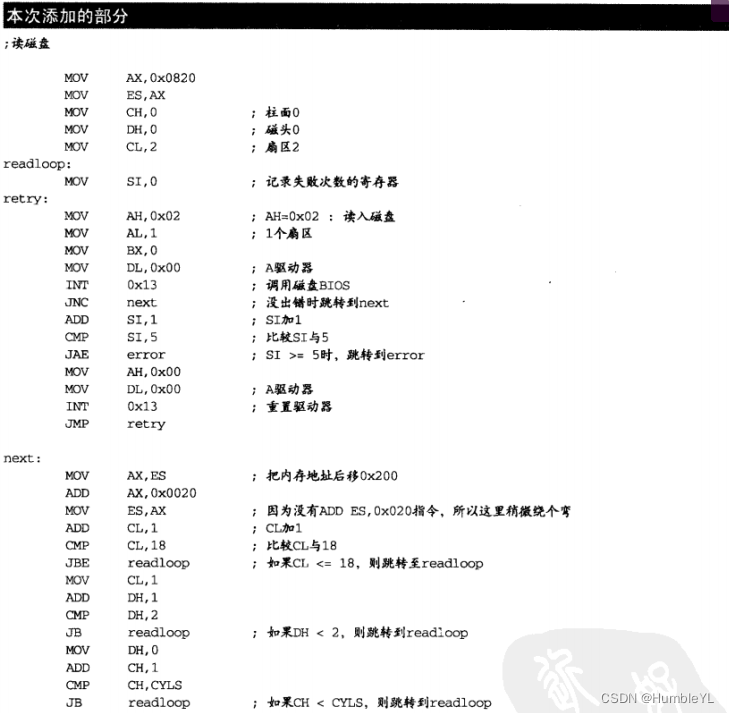
; 读取磁盘
MOV AX,0x0820
MOV ES,AX
MOV CH,0 ; 柱面0
MOV DH,0 ; 磁头0
MOV CL,2 ; 扇区2
readloop:
MOV SI,0 ; 记录失败次数寄存器
retry:
MOV AH,0x02 ; AH=0x02 : 读入磁盘
MOV AL,1 ; 1个扇区
MOV BX,0
MOV DL,0x00 ; A驱动器
INT 0x13 ; 调用磁盘BIOS
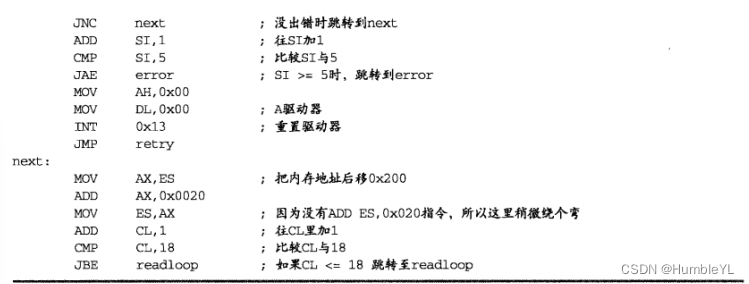
JNC next ; 没出错则跳转到next
ADD SI,1 ; 往SI加1
CMP SI,5 ; 比较SI与5
JAE error ; SI >= 5 跳转到error
MOV AH,0x00
MOV DL,0x00 ; A驱动器
INT 0x13 ; 重置驱动器
JMP retry
next:
MOV AX,ES ; 把内存地址后移0x200(512/16十六进制转换)
ADD AX,0x0020
MOV ES,AX ; ADD ES,0x020因为没有ADD ES,只能通过AX进行
ADD CL,1 ; 往CL里面加1
CMP CL,18 ; 比较CL与18
JBE readloop ; CL <= 18 跳转到readloop
MOV CL,1
ADD DH,1
CMP DH,2
JB readloop ; DH < 2 跳转到readloop
MOV DH,0
ADD CH,1
CMP CH,CYLS
JB readloop ; CH < CYLS 跳转到readloop
; 读取完毕,跳转到haribote.sys执行!
MOV [0x0ff0],CH ; IPLがどこまで読んだのかをメモ
JMP 0xc200
error:
MOV SI,msg
putloop:
MOV AL,[SI]
ADD SI,1 ; 给SI加1
CMP AL,0
JE fin
MOV AH,0x0e ; 显示一个文字
MOV BX,15 ; 指定字符颜色
INT 0x10 ; 调用显卡BIOS
JMP putloop
fin:
HLT ; 让CPU停止,等待指令
JMP fin ; 无限循环
msg:
DB 0x0a, 0x0a ; 换行两次
DB "load error"
DB 0x0a ; 换行
DB 0
RESB 0x7dfe-$ ; 填写0x00直到0x001fe
DB 0x55, 0xaa
这里有个JC指令,是有条件跳转指令
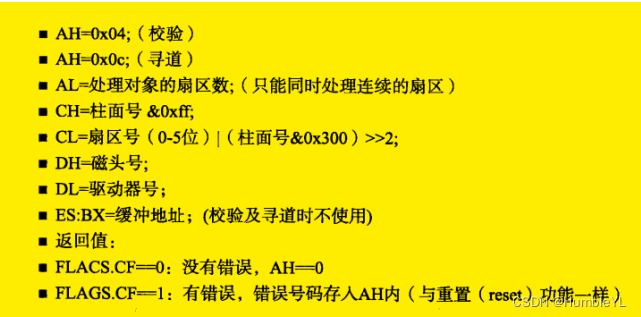
注意到上面有个INT 0x13,这是调用BIOS的0x13号函数
常用的有:
这个进位标志位是存储在标志寄存器里面。
为了明白今天新加的代码,需要了解磁盘的工作方式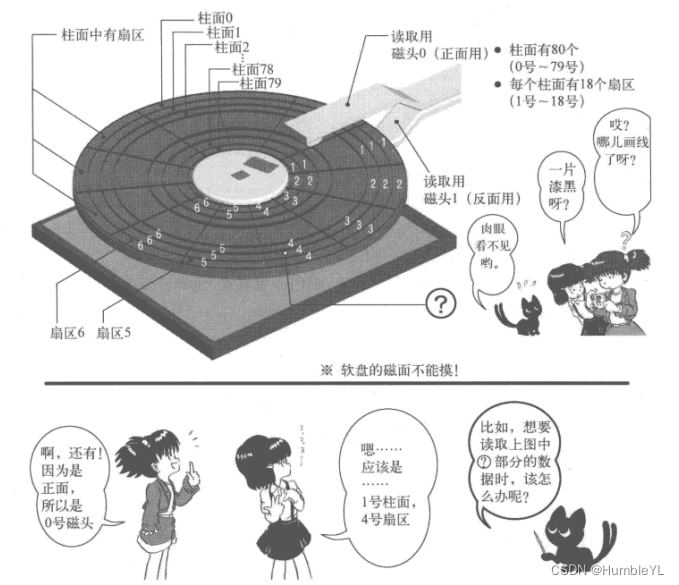
一定记得,磁盘他是实体的,是三维立体的物体,这样就好理解了
IPL启动区就在C0-H0-S1(柱面0-磁头0-扇区1)
接下来,为了介绍缓冲区(cache)的概念,需要再次复习一下,CPU寻址方式:段基址+段内地址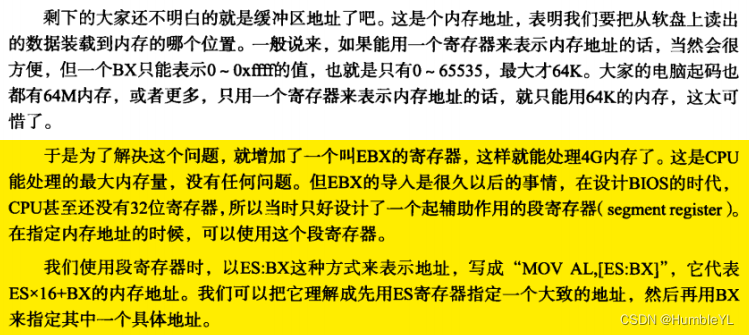
上面的说法比较老,最新的指令格式是AT&T格式,但是,基本思想是一致的,可百度。
这次的运行结果将会一闪而过,大家获取源码之后可以自行体验。
这里有一个报错:
解决方式如下:
16位不兼容解决方案
最好重启一下!!!!!!!!!!
运行结果解释漆黑一片:
软盘不可靠,读取失败的情况下,需要多次读取,考虑极端情况,需要限制读取次数
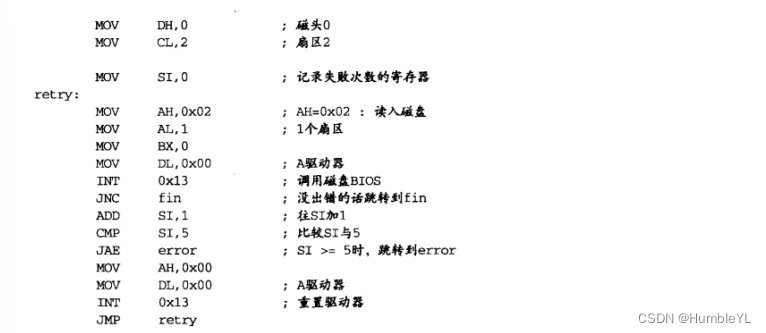
这里两个新的指令:
JNC:进位标志为0时跳转
JAE:大于等于时跳转
INT 0x13,功能是系统复位
新的指令:
JBE:小于等于跳转
代码如下:
; haribote-ipl
; TAB=4
CYLS EQU 10 ; 声明CYLS=10
ORG 0x7c00 ; 指明程序装载地址
; 标准FAT12格式软盘专用的代码 Stand FAT12 format floppy code
JMP entry
DB 0x90
DB "HARIBOTE" ; 启动扇区名称(8字节)
DW 512 ; 每个扇区(sector)大小(必须512字节)
DB 1 ; 簇(cluster)大小(必须为1个扇区)
DW 1 ; FAT起始位置(一般为第一个扇区)
DB 2 ; FAT个数(必须为2)
DW 224 ; 根目录大小(一般为224项)
DW 2880 ; 该磁盘大小(必须为2880扇区1440*1024/512)
DB 0xf0 ; 磁盘类型(必须为0xf0)
DW 9 ; FAT的长度(必??9扇区)
DW 18 ; 一个磁道(track)有几个扇区(必须为18)
DW 2 ; 磁头数(必??2)
DD 0 ; 不使用分区,必须是0
DD 2880 ; 重写一次磁盘大小
DB 0,0,0x29 ; 意义不明(固定)
DD 0xffffffff ; (可能是)卷标号码
DB "HARIBOTEOS " ; 磁盘的名称(必须为11字?,不足填空格)
DB "FAT12 " ; 磁盘格式名称(必??8字?,不足填空格)
RESB 18 ; 先空出18字节
; 程序主体
entry:
MOV AX,0 ; 初始化寄存器
MOV SS,AX
MOV SP,0x7c00
MOV DS,AX
; 读取磁盘
MOV AX,0x0820
MOV ES,AX
MOV CH,0 ; 柱面0
MOV DH,0 ; 磁头0
MOV CL,2 ; 扇区2
readloop:
MOV SI,0 ; 记录失败次数寄存器
retry:
MOV AH,0x02 ; AH=0x02 : 读入磁盘
MOV AL,1 ; 1个扇区
MOV BX,0
MOV DL,0x00 ; A驱动器
INT 0x13 ; 调用磁盘BIOS
JNC next ; 没出错则跳转到next
ADD SI,1 ; 往SI加1
CMP SI,5 ; 比较SI与5
JAE error ; SI >= 5 跳转到error
MOV AH,0x00
MOV DL,0x00 ; A驱动器
INT 0x13 ; 重置驱动器
JMP retry
next:
MOV AX,ES ; 把内存地址后移0x200(512/16十六进制转换)
ADD AX,0x0020
MOV ES,AX ; ADD ES,0x020因为没有ADD ES,只能通过AX进行
ADD CL,1 ; 往CL里面加1
CMP CL,18 ; 比较CL与18
JBE readloop ; CL <= 18 跳转到readloop
MOV CL,1
ADD DH,1
CMP DH,2
JB readloop ; DH < 2 跳转到readloop
MOV DH,0
ADD CH,1
CMP CH,CYLS
JB readloop ; CH < CYLS 跳转到readloop
; 读取完毕,跳转到haribote.sys执行!
MOV [0x0ff0],CH ; IPLがどこまで読んだのかをメモ
JMP 0xc200
error:
MOV SI,msg
putloop:
MOV AL,[SI]
ADD SI,1 ; 给SI加1
CMP AL,0
JE fin
MOV AH,0x0e ; 显示一个文字
MOV BX,15 ; 指定字符颜色
INT 0x10 ; 调用显卡BIOS
JMP putloop
fin:
HLT ; 让CPU停止,等待指令
JMP fin ; 无限循环
msg:
DB 0x0a, 0x0a ; 换行两次
DB "load error"
DB 0x0a ; 换行
DB 0
RESB 0x7dfe-$ ; 填写0x00直到0x001fe
DB 0x55, 0xaa
新加指令:
JB:如果小于,跳转
EQU:等价与#define

上面已经完成了启动区的制作
下面,写一个最简单的操作系统






全黑画面:
接下来就要以C语言作为开发语言,汇编语言暂时不用了。
32位模式就不能调用BIOS函数了(16位编写的)
所以需要使用BIOS的地方,我们需要首先放到前面去加载,在asmhead.nas文件中
; haribote-os boot asm
; TAB=4
BOTPAK EQU 0x00280000 ; 加载bootpack
DSKCAC EQU 0x00100000 ; 磁盘缓存的位置
DSKCAC0 EQU 0x00008000 ; 磁盘缓存的位置(实模式)
; BOOT_INFO相关
CYLS EQU 0x0ff0 ; 引导扇区设置
LEDS EQU 0x0ff1
VMODE EQU 0x0ff2 ; 关于颜色的信息
SCRNX EQU 0x0ff4 ; 分辨率X
SCRNY EQU 0x0ff6 ; 分辨率Y
VRAM EQU 0x0ff8 ; 图像缓冲区的起始地址
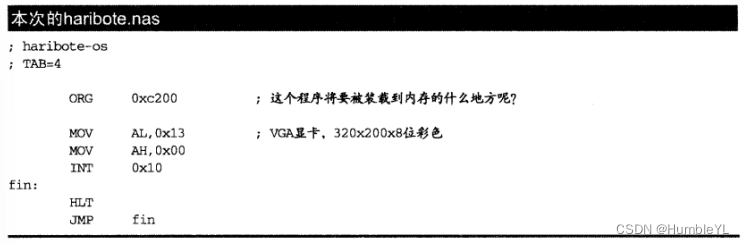
ORG 0xc200 ; 这个的程序要被装载的内存地址
; 画面モードを設定
MOV AL,0x13 ; VGA显卡,320x200x8bit
MOV AH,0x00
INT 0x10
MOV BYTE [VMODE],8 ; 屏幕的模式(参考C语言的引用)
MOV WORD [SCRNX],320
MOV WORD [SCRNY],200
MOV DWORD [VRAM],0x000a0000
; 通过BIOS获取指示灯状态
MOV AH,0x02
INT 0x16 ; keyboard BIOS
MOV [LEDS],AL
; 防止PIC接受所有中断
; AT兼容机的规范、PIC初始化
; 然后之前在CLI不做任何事就挂起
; PIC在同意后初始化
MOV AL,0xff
OUT 0x21,AL
NOP ; 不断执行OUT指令
OUT 0xa1,AL
CLI ; 进一步中断CPU
; 让CPU支持1M以上内存、设置A20GATE
CALL waitkbdout
MOV AL,0xd1
OUT 0x64,AL
CALL waitkbdout
MOV AL,0xdf ; enable A20
OUT 0x60,AL
CALL waitkbdout
; 保护模式转换
[INSTRSET "i486p"] ; 说明使用486指令
LGDT [GDTR0] ; 设置临时GDT
MOV EAX,CR0
AND EAX,0x7fffffff ; 使用bit31(禁用分页)
OR EAX,0x00000001 ; bit0到1转换(保护模式过渡)
MOV CR0,EAX
JMP pipelineflush
pipelineflush:
MOV AX,1*8 ; 写32bit的段
MOV DS,AX
MOV ES,AX
MOV FS,AX
MOV GS,AX
MOV SS,AX
; bootpack传递
MOV ESI,bootpack ; 源
MOV EDI,BOTPAK ; 目标
MOV ECX,512*1024/4
CALL memcpy
; 传输磁盘数据
; 从引导区开始
MOV ESI,0x7c00 ; 源
MOV EDI,DSKCAC ; 目标
MOV ECX,512/4
CALL memcpy
; 剩余的全部
MOV ESI,DSKCAC0+512 ; 源
MOV EDI,DSKCAC+512 ; 目标
MOV ECX,0
MOV CL,BYTE [CYLS]
IMUL ECX,512*18*2/4 ; 除以4得到字节数
SUB ECX,512/4 ; IPL偏移量
CALL memcpy
; 由于还需要asmhead才能完成
; 完成其余的bootpack任务
; bootpack启动
MOV EBX,BOTPAK
MOV ECX,[EBX+16]
ADD ECX,3 ; ECX += 3;
SHR ECX,2 ; ECX /= 4;
JZ skip ; 传输完成
MOV ESI,[EBX+20] ; 源
ADD ESI,EBX
MOV EDI,[EBX+12] ; 目标
CALL memcpy
skip:
MOV ESP,[EBX+12] ; 堆栈的初始化
JMP DWORD 2*8:0x0000001b
waitkbdout:
IN AL,0x64
AND AL,0x02
JNZ waitkbdout ; AND结果不为0跳转到waitkbdout
RET
memcpy:
MOV EAX,[ESI]
ADD ESI,4
MOV [EDI],EAX
ADD EDI,4
SUB ECX,1
JNZ memcpy ; 运算结果不为0跳转到memcpy
RET
; memcpy地址前缀大小
ALIGNB 16
GDT0:
RESB 8 ; 初始值
DW 0xffff,0x0000,0x9200,0x00cf ; 写32bit位段寄存器
DW 0xffff,