CubeMX配置PWM
本章介绍使用STM32CubeMX对PWM进行配置的方法,PWM的基本原理,并通过示波器来测试实现结果,如果有LED灯也可以,PWM控制LED灯的亮度。
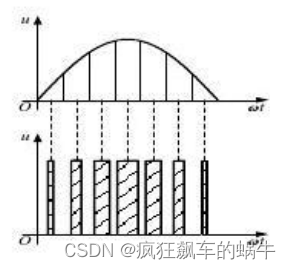
PWM(Pulse Width Modulation)脉冲宽度调制,是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术。它是把每一脉冲宽度均相等的脉冲列作为PWM波形,通过改变脉冲列的周期可以调频,改变脉冲的宽度或占空比可以调压,采用适当控制方法即可使电压与频率协调变化。可以通过调整PWM的周期、PWM的占空比而达到控制电流。例如输出占空比为50%,频率为10Hz的脉冲,高电平为3.3V.则其输出的模拟效果相当于输出一个1.65V的高电平。脉冲调制有两个重要的参数,第一个就是输出频率,频率越高,则模拟的效果越好。第二个就是占空比。占空比就是改变输出模拟效果的电压大小。占空比越大则模拟出的电压越大。
广泛应用在从测量、通信到功率控制与变换的许多领域中。STM32内置多个IO输出PWM通道。
脉冲宽度调制模式可以生成一个信号,该信号频率由自动重载寄存器(TIMx_ARR)寄存器值决定,其占空比则由捕获/比较寄存器(TIMx_CCRx) 寄存器值决定。
在 PWM 模式下,计数器寄存器(TIMx_CNT )总是与捕获/比较寄存器(TIMx_CCRx )进行比较,以确定是TIMx_CCRx>TIMx_CNT 还是 TIMx_CNT<TIMx_CCRx(取决于计数器计数方向)。
下图为PWM边沿对齐模式(递增计数配置)。图中CCRx为捕获/比较寄存器,OCxREF为输出比较信号,CCxIF为中断状态标识位。
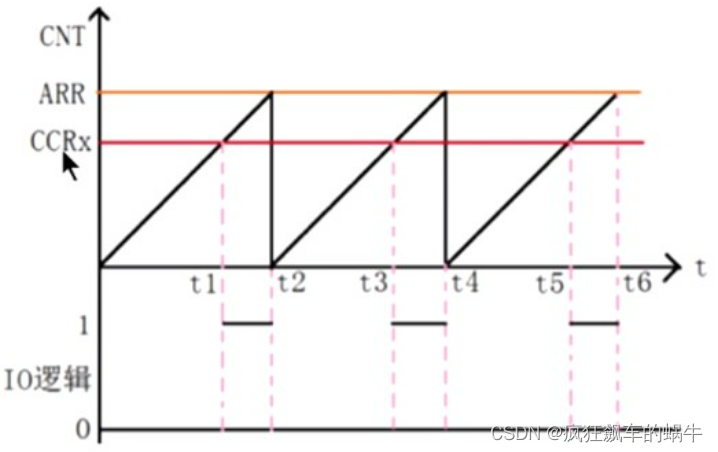
当CCRX=4时,当捕获/比较寄存器(TIMx_CCRx)比计数器小时,输出高电平,反之则输出低电平。
因此改变CCRx的值就可以改变PWM输出的占空比,改变ARR的值就可以改变PWM输出的频率.

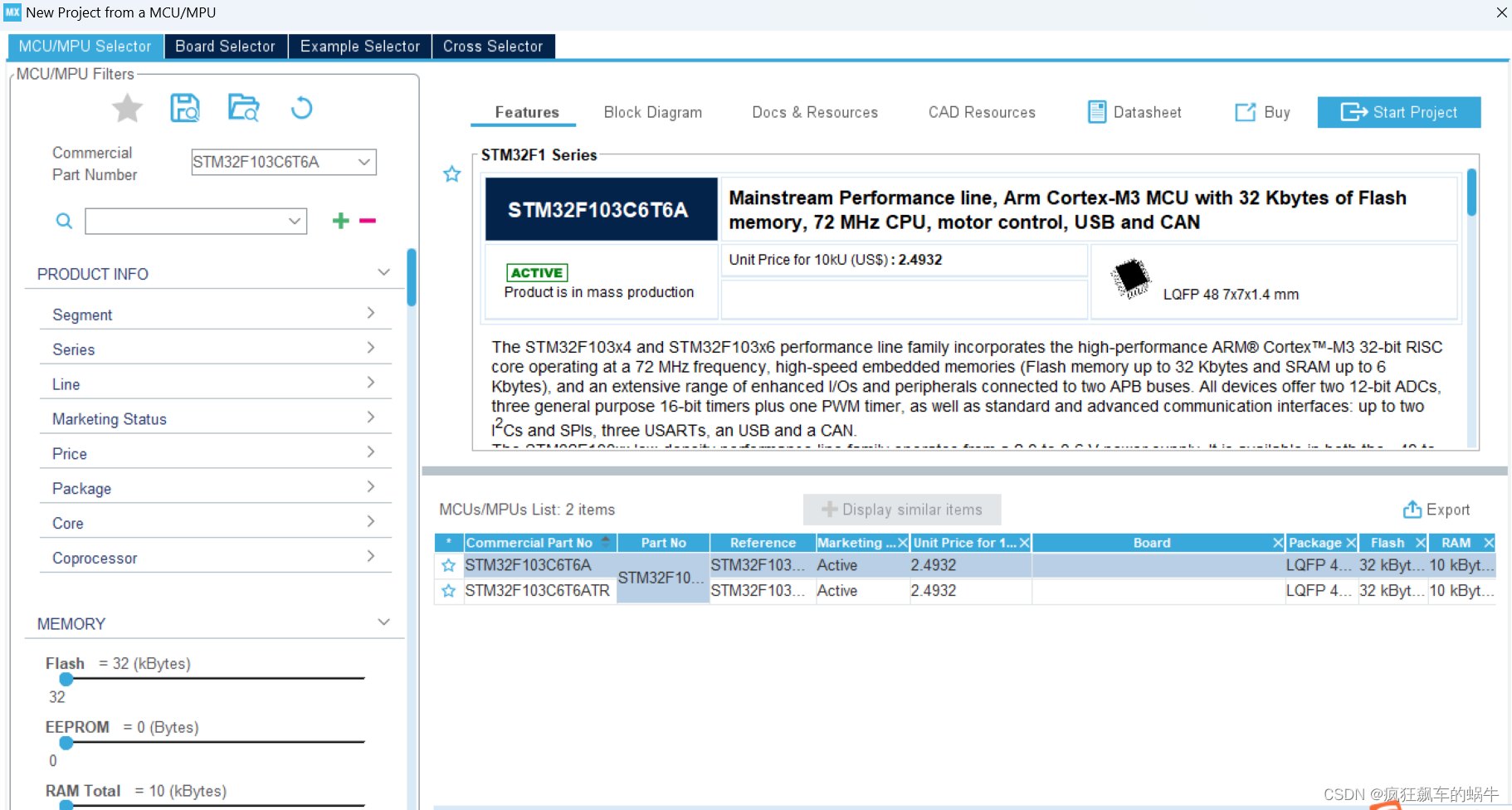
选择芯片stm32f103c6t6,新建工程
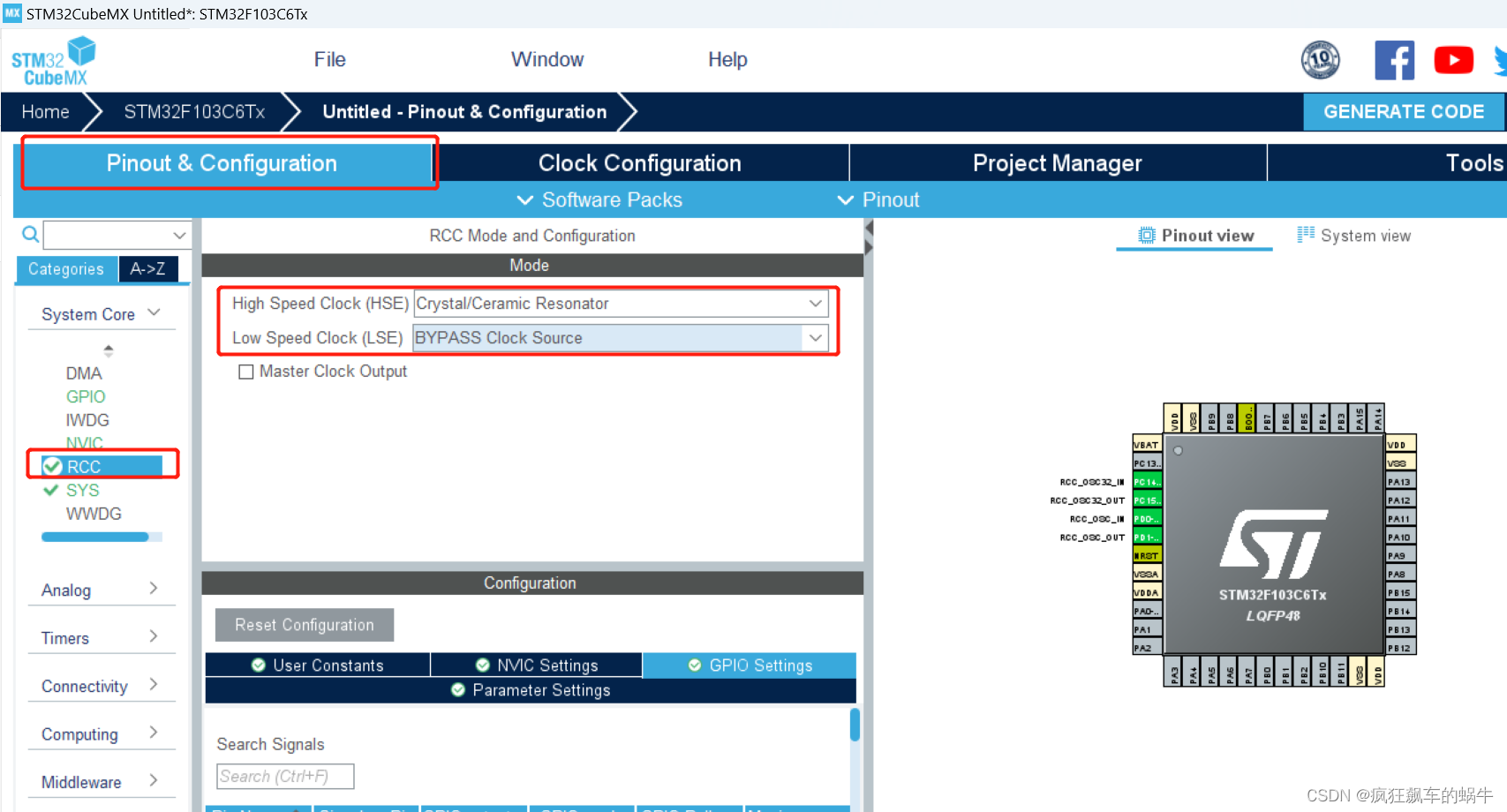
设置时钟源,最小系统外部晶振8Mhz,作为外部高速HSE时钟源。由于没有外接外部低速晶振,这里低速时钟源选择旁路时钟源。
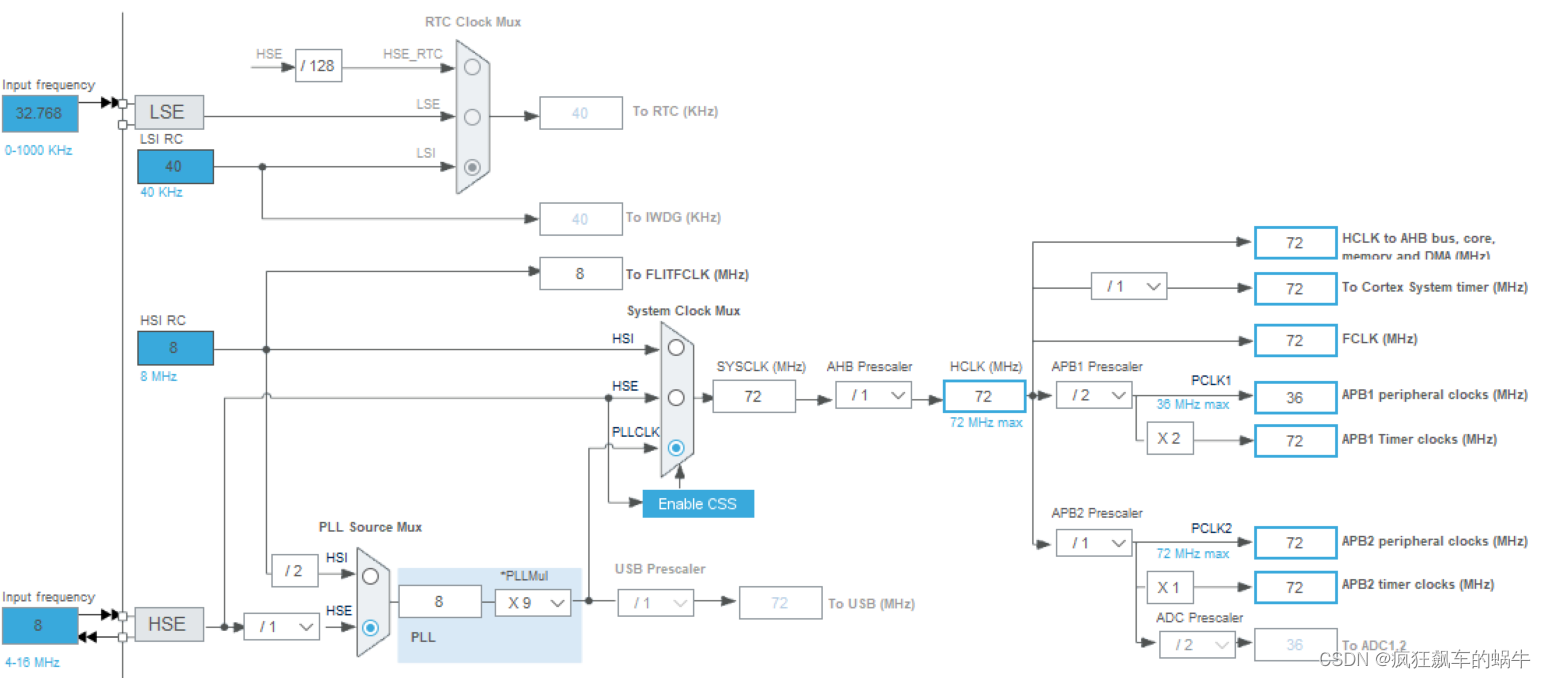
配置时钟树,这里使用官方推荐的配置
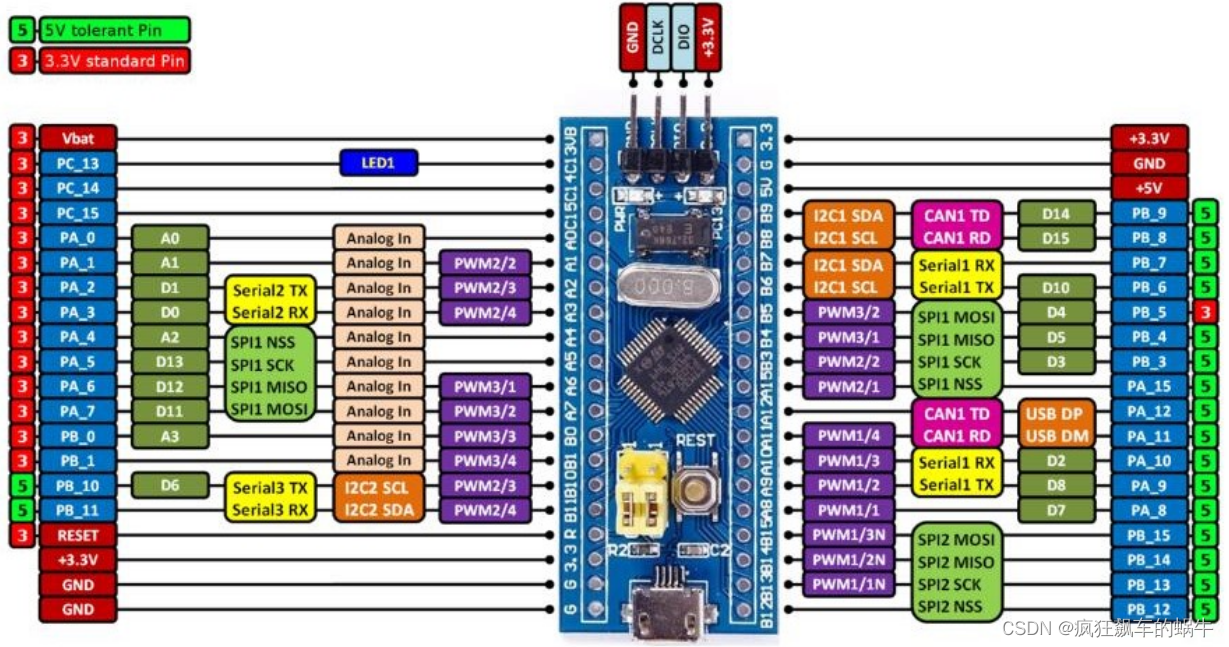
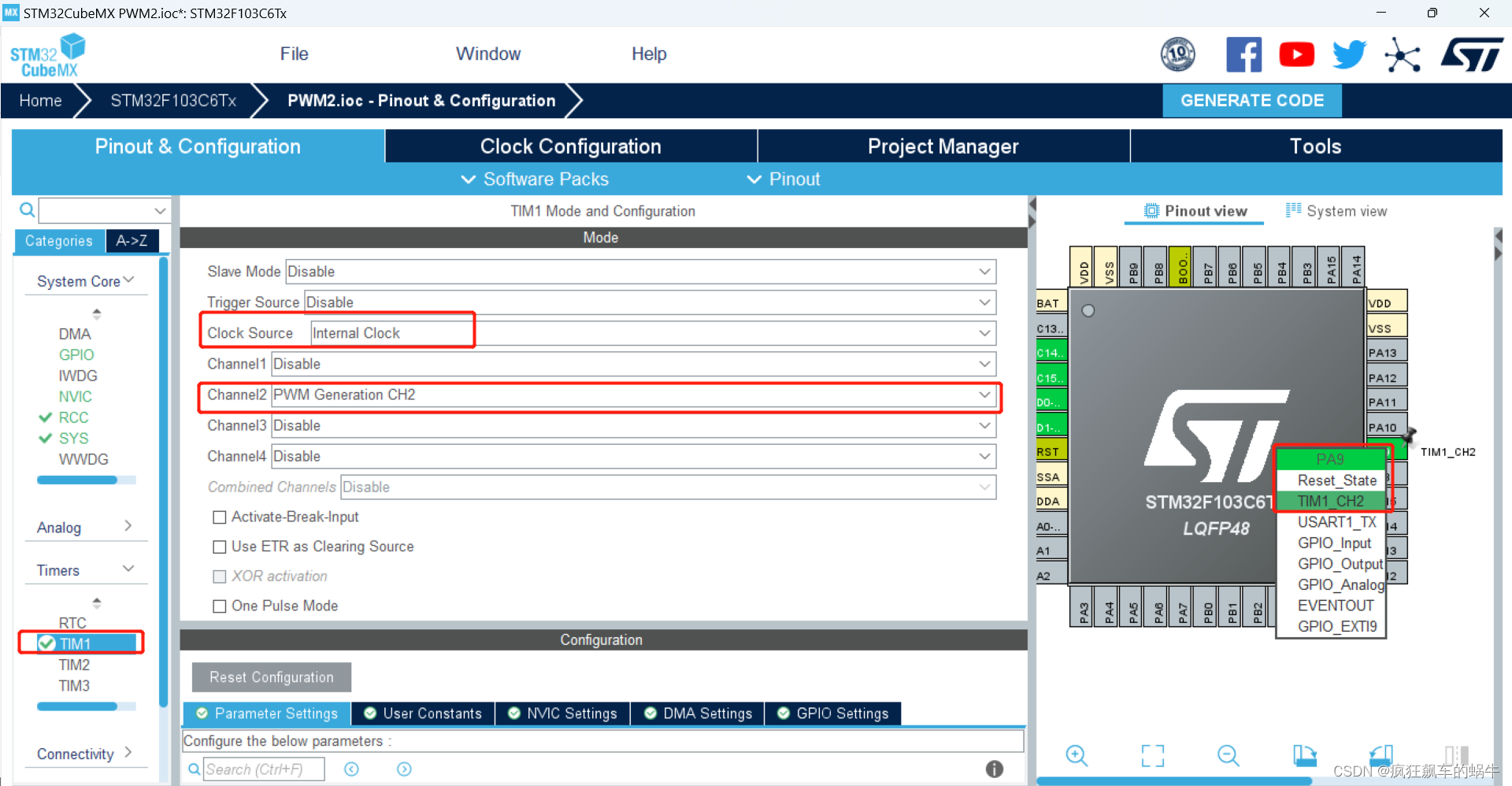
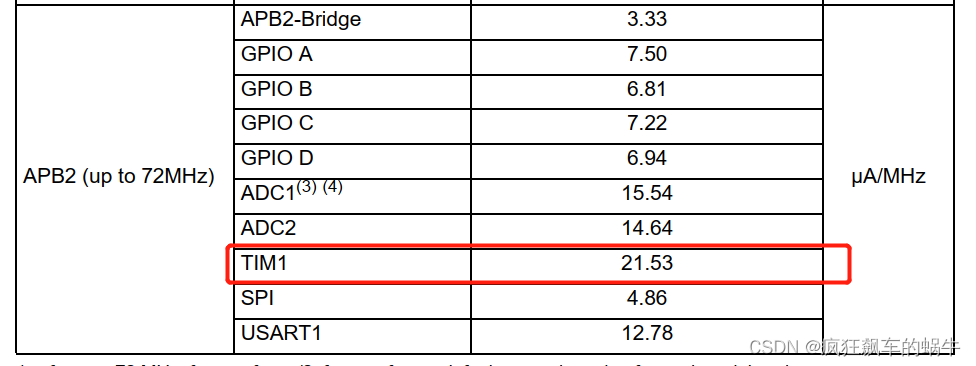
配置引脚功能,从datasheet中可以PA9可以复用为TIM1_CH2输出,因此将管脚PA9配置为定时器1的通道2输出。同时TIM1的通道2配置为PWM,这样就可以在PA9管脚得到PWM输出。datasheet截图如下:

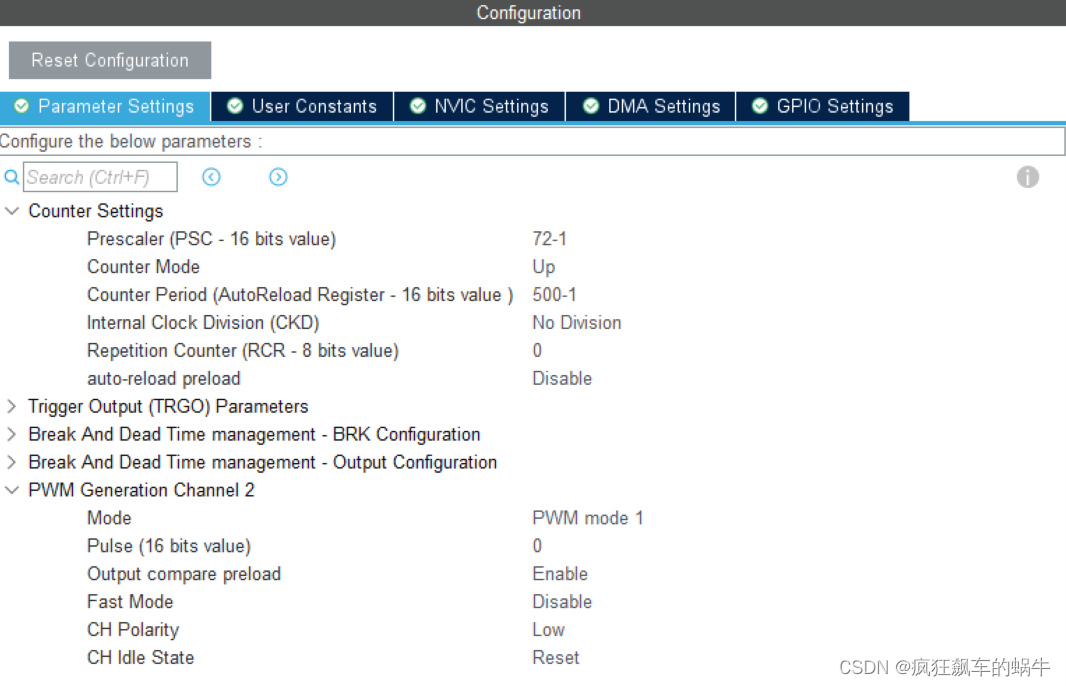
配置如下:
前面设置HSE时钟为72MHz;TIM1的时钟挂载在APB2 Time Clocks上为72MHz
预分频系数设置为72-1,向上计数,自动重装载值设为500-1,则计时器时钟频率为1MHz,计时器周期为1us,定时器溢出周期(即PWM周期)为 500 * 1 = 500us,溢出频率(即PWM频率)为1/500us = 2KHz
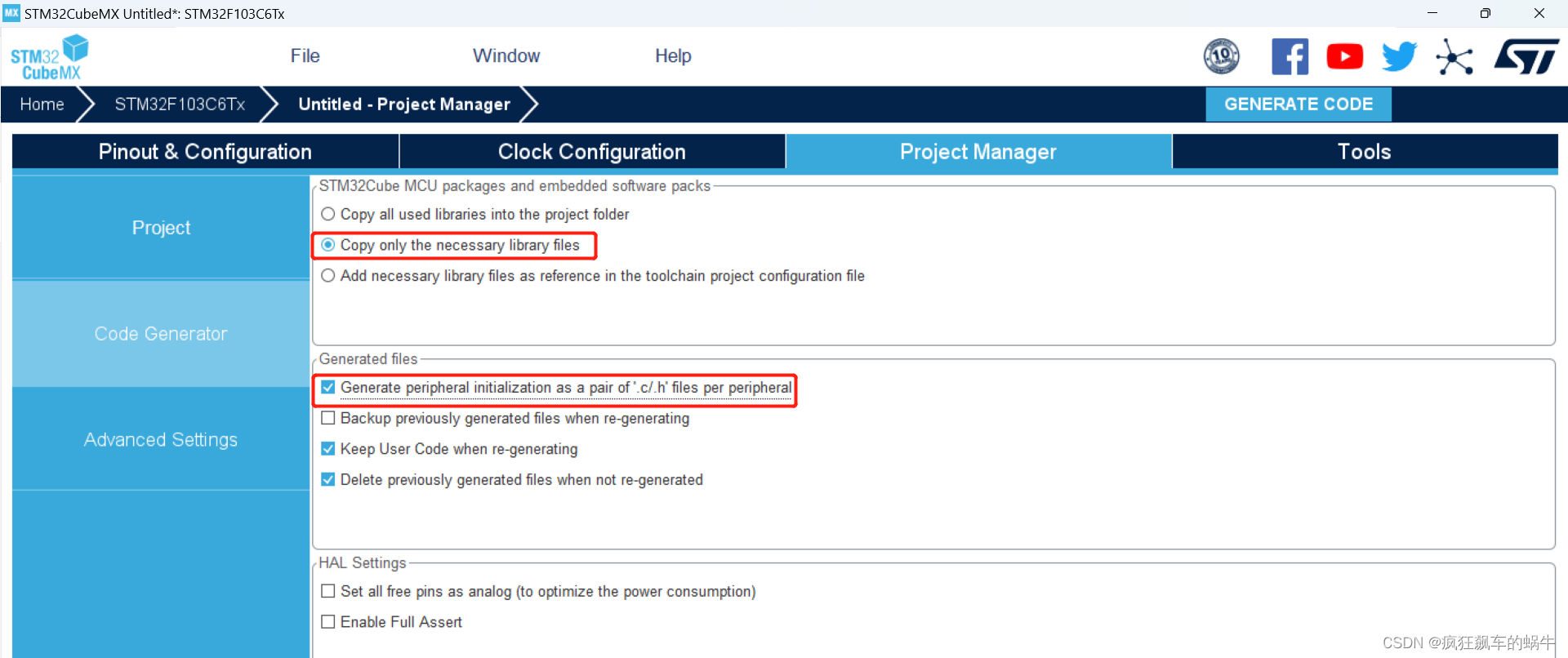
Code Generator中设置只拷贝使用到的库,分离.c和.h文件
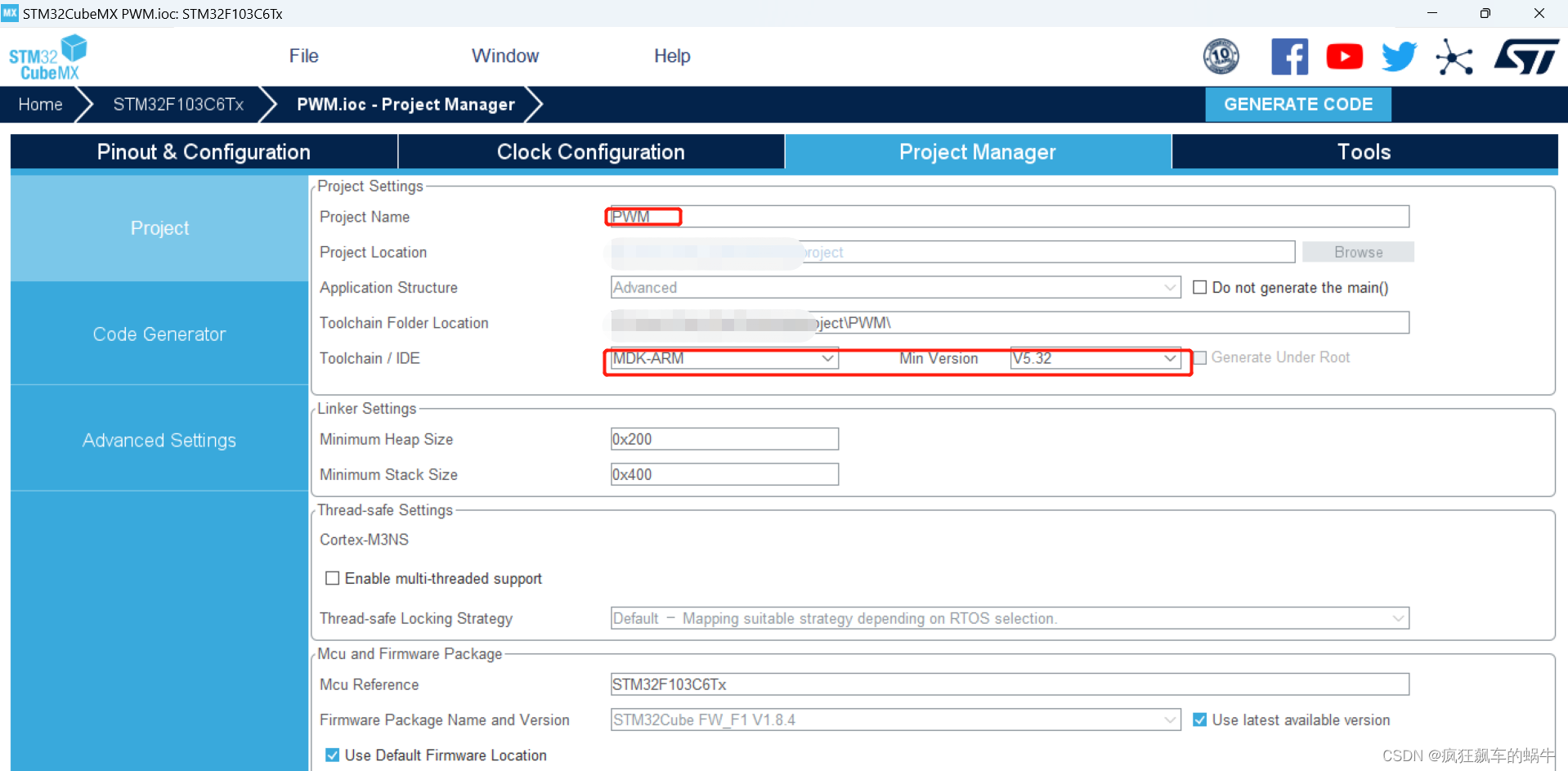
设置好项目名称和路径,点击GENERATE CODE即可,生成后使用keil5 IDE打开。
实现一个周期为500us,占空比不断变化的pwm输出功能,代码如下
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
uint16_t pwmVal=0; //PWM占空比
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_TIM1_Init();
/* USER CODE BEGIN 2 */
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_2); //开启定时器PWM输出
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
while (pwmVal< 500)
{
pwmVal++;
__HAL_TIM_SetCompare(&htim1, TIM_CHANNEL_2, pwmVal); //修改占空比
HAL_Delay(1);
}
while (pwmVal)
{
pwmVal--;
__HAL_TIM_SetCompare(&htim1, TIM_CHANNEL_2, pwmVal); //修改占空比
HAL_Delay(1);
}
HAL_Delay(200);
/* USER CODE END 3 */
}
/* USER CODE END 3 */
}
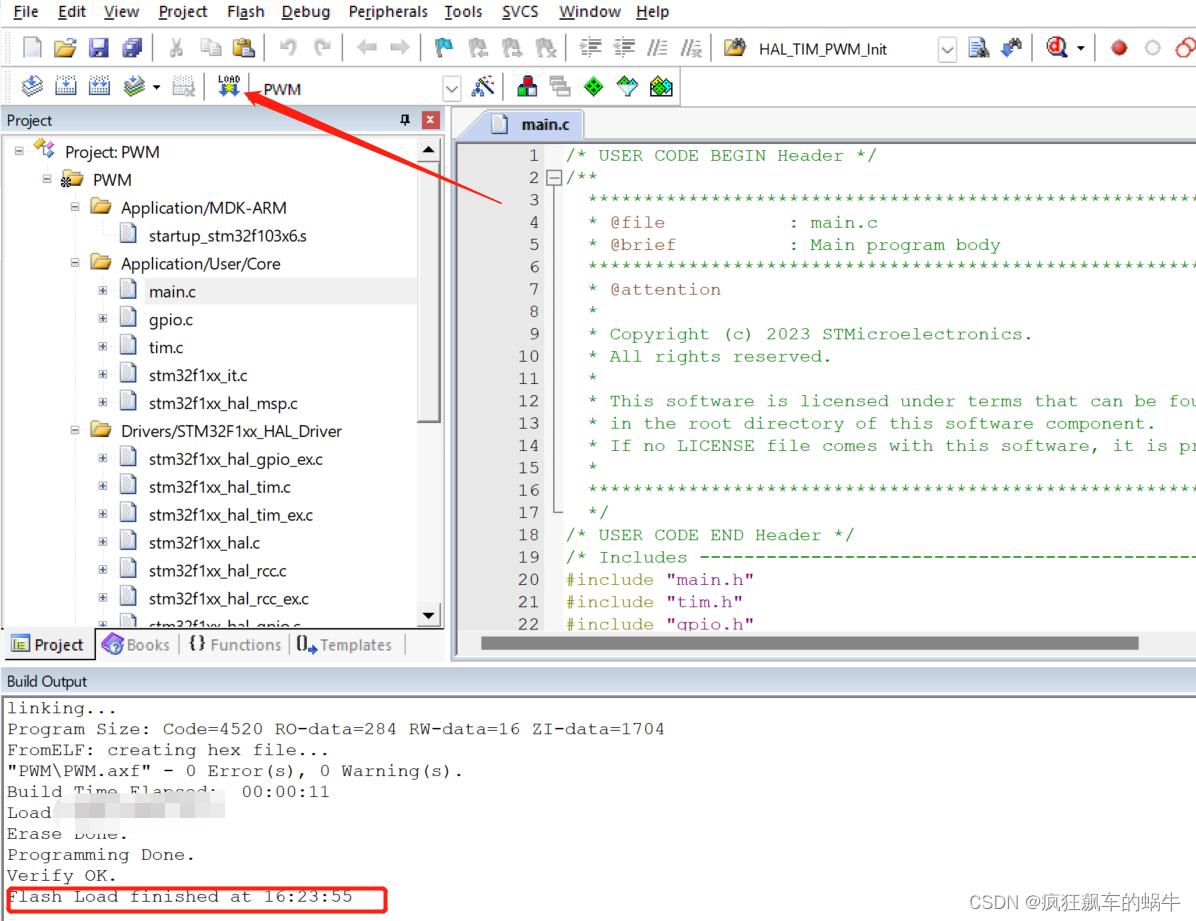
代码编译成功
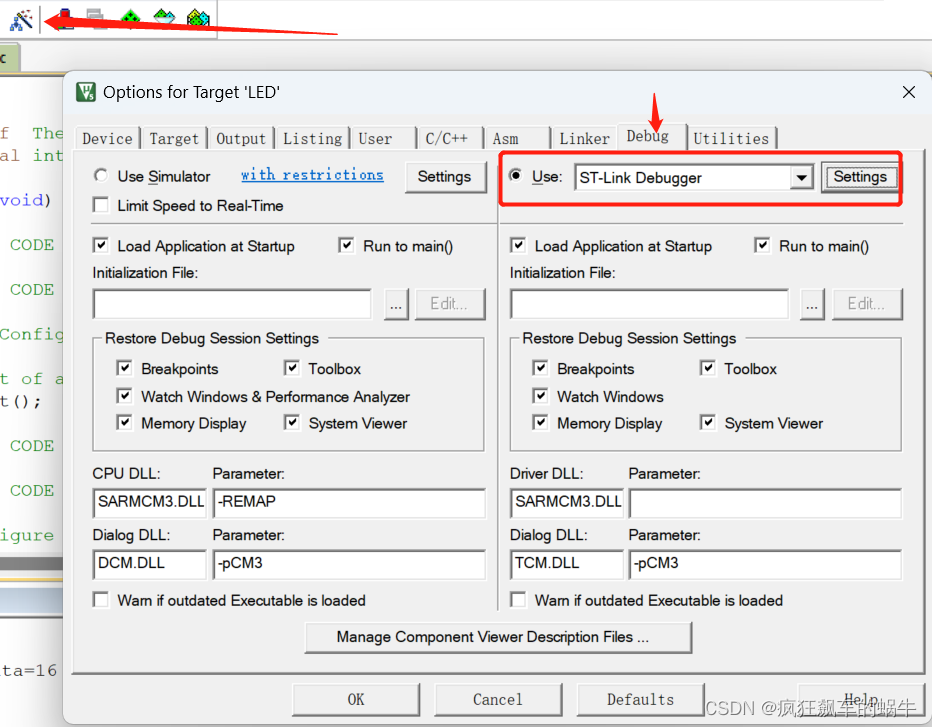
在下载前检查keil是否检测到ST-LINK,选择魔法棒进行设置
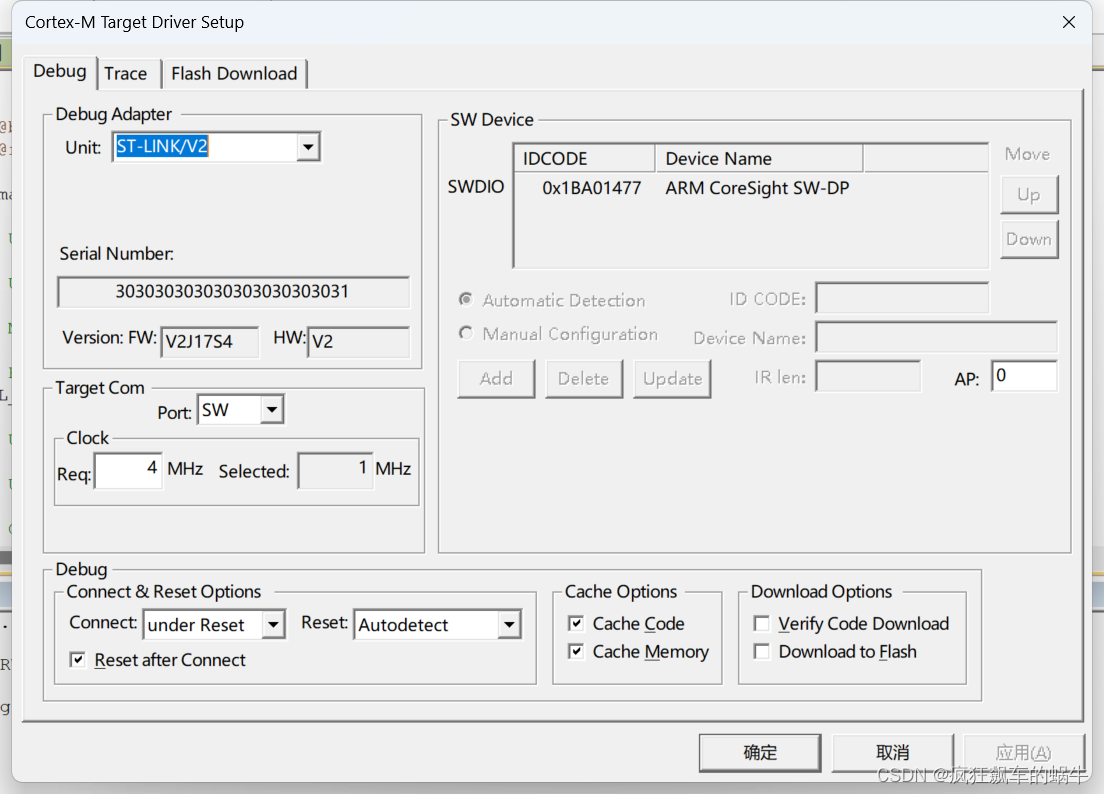
如图所示,已经检测到ST-LINK 下载器
点击load,自动下载固件
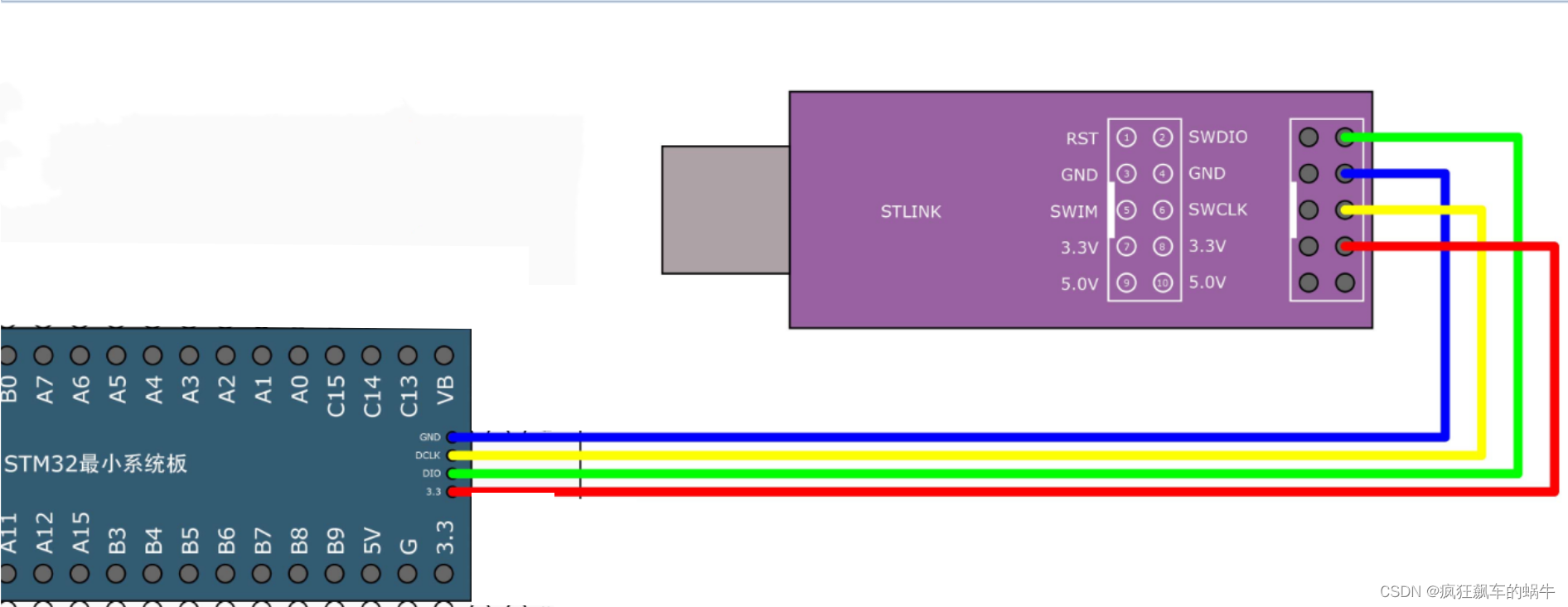
烧录器ST-LINK V2和最小系统板的连接如图所示: 四线连接 SWDIO,GND,SWCLK,和3.3V电源
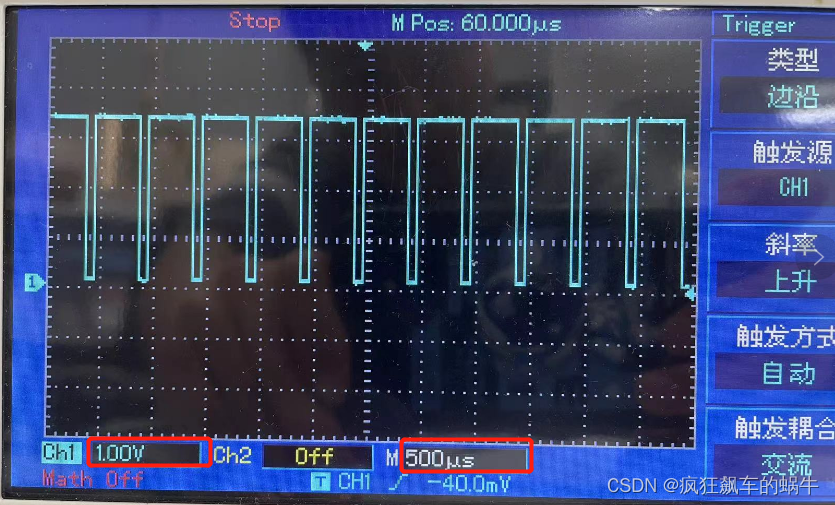
由于没有找到LED灯,所以使用示波器进行测量,从测试结果可以看到,输出了PA9脚输出了电压为3.3V,周期为500 us的方波,且占空比在不断变化,如下图所示。
下面上个动图,看一下占空比不断变化的过程
本章介绍STM32CubeMX对PWM进行配置的方法,PWM的技术实现原理,最后使用示波器来测试实验结果。
我正在编写一个包含C扩展的gem。通常当我写一个gem时,我会遵循TDD的过程,我会写一个失败的规范,然后处理代码直到它通过,等等......在“ext/mygem/mygem.c”中我的C扩展和在gemspec的“扩展”中配置的有效extconf.rb,如何运行我的规范并仍然加载我的C扩展?当我更改C代码时,我需要采取哪些步骤来重新编译代码?这可能是个愚蠢的问题,但是从我的gem的开发源代码树中输入“bundleinstall”不会构建任何native扩展。当我手动运行rubyext/mygem/extconf.rb时,我确实得到了一个Makefile(在整个项目的根目录中),然后当
我有一个在Linux服务器上运行的ruby脚本。它不使用rails或任何东西。它基本上是一个命令行ruby脚本,可以像这样传递参数:./ruby_script.rbarg1arg2如何将参数抽象到配置文件(例如yaml文件或其他文件)中?您能否举例说明如何做到这一点?提前谢谢你。 最佳答案 首先,您可以运行一个写入YAML配置文件的独立脚本:require"yaml"File.write("path_to_yaml_file",[arg1,arg2].to_yaml)然后,在您的应用中阅读它:require"yaml"arg
我已经在Sinatra上创建了应用程序,它代表了一个简单的API。我想在生产和开发上进行部署。我想在部署时选择,是开发还是生产,一些方法的逻辑应该改变,这取决于部署类型。是否有任何想法,如何完成以及解决此问题的一些示例。例子:我有代码get'/api/test'doreturn"Itisdev"end但是在部署到生产环境之后我想在运行/api/test之后看到ItisPROD如何实现? 最佳答案 根据SinatraDocumentation:EnvironmentscanbesetthroughtheRACK_ENVenvironm
我们的git存储库中目前有一个Gemfile。但是,有一个gem我只在我的环境中本地使用(我的团队不使用它)。为了使用它,我必须将它添加到我们的Gemfile中,但每次我checkout到我们的master/dev主分支时,由于与跟踪的gemfile冲突,我必须删除它。我想要的是类似Gemfile.local的东西,它将继承从Gemfile导入的gems,但也允许在那里导入新的gems以供使用只有我的机器。此文件将在.gitignore中被忽略。这可能吗? 最佳答案 设置BUNDLE_GEMFILE环境变量:BUNDLE_GEMFI
这似乎非常适得其反,因为太多的gem会在window上破裂。我一直在处理很多mysql和ruby-mysqlgem问题(gem本身发生段错误,一个名为UnixSocket的类显然在Windows机器上不能正常工作,等等)。我只是在浪费时间吗?我应该转向不同的脚本语言吗? 最佳答案 我在Windows上使用Ruby的经验很少,但是当我开始使用Ruby时,我是在Windows上,我的总体印象是它不是Windows原生系统。因此,在主要使用Windows多年之后,开始使用Ruby促使我切换回原来的系统Unix,这次是Linux。Rub
我正在玩HTML5视频并且在ERB中有以下片段:mp4视频从在我的开发环境中运行的服务器很好地流式传输到chrome。然而firefox显示带有海报图像的视频播放器,但带有一个大X。问题似乎是mongrel不确定ogv扩展的mime类型,并且只返回text/plain,如curl所示:$curl-Ihttp://0.0.0.0:3000/pr6.ogvHTTP/1.1200OKConnection:closeDate:Mon,19Apr201012:33:50GMTLast-Modified:Sun,18Apr201012:46:07GMTContent-Type:text/plain
无论您是想搭建桌面端、WEB端或者移动端APP应用,HOOPSPlatform组件都可以为您提供弹性的3D集成架构,同时,由工业领域3D技术专家组成的HOOPS技术团队也能为您提供技术支持服务。如果您的客户期望有一种在多个平台(桌面/WEB/APP,而且某些客户端是“瘦”客户端)快速、方便地将数据接入到3D应用系统的解决方案,并且当访问数据时,在各个平台上的性能和用户体验保持一致,HOOPSPlatform将帮助您完成。利用HOOPSPlatform,您可以开发在任何环境下的3D基础应用架构。HOOPSPlatform可以帮您打造3D创新型产品,HOOPSSDK包含的技术有:快速且准确的CAD
在应用开发中,有时候我们需要获取系统的设备信息,用于数据上报和行为分析。那在鸿蒙系统中,我们应该怎么去获取设备的系统信息呢,比如说获取手机的系统版本号、手机的制造商、手机型号等数据。1、获取方式这里分为两种情况,一种是设备信息的获取,一种是系统信息的获取。1.1、获取设备信息获取设备信息,鸿蒙的SDK包为我们提供了DeviceInfo类,通过该类的一些静态方法,可以获取设备信息,DeviceInfo类的包路径为:ohos.system.DeviceInfo.具体的方法如下:ModifierandTypeMethodDescriptionstatic StringgetAbiList()Obt
之前在培训新生的时候,windows环境下配置opencv环境一直教的都是网上主流的vsstudio配置属性表,但是这个似乎对新生来说难度略高(虽然个人觉得完全是他们自己的问题),加之暑假之后对cmake实在是爱不释手,且这样配置确实十分简单(其实都不需要配置),故斗胆妄言vscode下配置CV之法。其实极为简单,图比较多所以很长。如果你看此文还配不好,你应该思考一下是不是自己的问题。闲话少说,直接开始。0.CMkae简介有的人到大二了都不知道cmake是什么,我不说是谁。CMake是一个开源免费并且跨平台的构建工具,可以用简单的语句来描述所有平台的编译过程。它能够根据当前所在平台输出对应的m
文章目录1.开发板选择*用到的资源2.串口通信(个人理解)3.代码分析(注释比较详细)1.主函数2.串口1配置3.串口2配置以及中断函数4.注意问题5.源码链接1.开发板选择我用的是STM32F103RCT6的板子,不过代码大概在F103系列的板子上都可以运行,我试过在野火103的霸道板上也可以,主要看一下串口对应的引脚一不一样就行了,不一样的就更改一下。*用到的资源keil5软件这里用到了两个串口资源,采集数据一个,串口通信一个,板子对应引脚如下:串口1,TX:PA9,RX:PA10串口2,TX:PA2,RX:PA32.串口通信(个人理解)我就从串口采集传感器数据这个过程说一下我自己的理解,