各位网友我又来了哈!!!最近7天都在玩stm32驱动小车,但是关于PWM调速这一块真的是有点难住我了,差点就放弃了。哈哈哈哈........今天先来分享一波,后面再聊故事吧!
用是stm32PWM调速首先要了解它的工作原理,简要概述就是:在stm32的GPIO口输出一个可以任意改变的电压信号,那么由于电压的值不同,电机的旋转方向和转速就会不同,即小车就可以做出加速减速,左转右转,前进后退的动作了。我是通过L298N模块来驱动电机的,下面我会通过图片和代码的形式来展示我的作品。温馨提示:不适合大佬观看!
一、对L298N的简单描述(图片来自百度)

如图,该模块可以驱动AB两个直流电机(采用并联可以驱动好几个)12V输入口可接外部电源提供动力,最重要就是右下方的那6个排针了。如图从左往右依次为:ENA,IN1,IN2,IN3,IN4,ENB。调速时要拔除ENA,ENB上的跳线帽,为了简便期间,我这里只论述电机A。电机B同理,和A一模一样。
对电机A来说,会用到3个排针:ENA,IN1,IN2。IN1,IN2分别接电机A的两个线(随便接就行),ENA就是用来给电机输入PWM信号的,也就是用来接收stm32输出的PWM信号的。那事情聊到这里就简单了。接下来就是配置stm32的GPIO口,让一个GPIO口输出PWM信号了。
二、PWM信号的输出(以时钟TIM2为例)
首先要说明的是:stm32的时钟通道的引脚是官方确定好的,一般情况下不能更改(二般情况下用“重映射”知识来更改),这里给大家提供图片一张(来自B站江科大自化协)
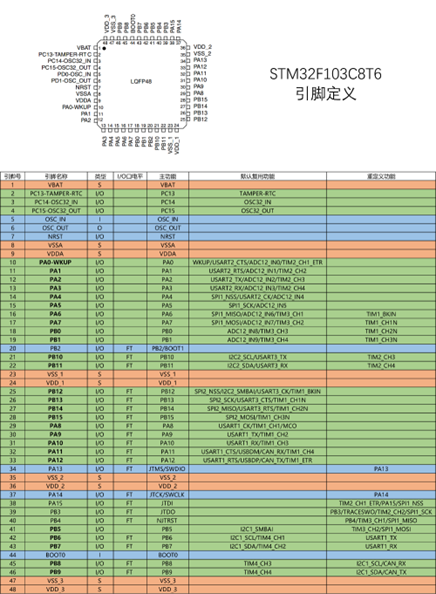
由大佬总结的图可知:对于TIM2时钟来说,它的通道1,2,3,4分别对应PA0,PA1,PA2,PA3。也就是说,我们只能选择这四种对应引脚进行设置。下面我以TIM2的通道1为例(再次提醒:TIM2的通道1对应PA0引脚)
1、封装一个PWM初始化的函数
2、在函数里面打开时钟
3、在函数里面配置GPIO PA0
4、在函数里面配置时基单元
5、在函数里面配置输出比较单元
详见代码
void PWM_TIM2_Init(void)/*配置TIM用来输出PWM波形时,要参考使用手册,因为它的GPIO口是官方确定的*/
{
/*打开TIM和GPIO的时钟*/
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
/*配置GPIO的输出模式、GPIO口、频率*/
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;/*复用推挽输出*/
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);/*GPIO初始化*/
/**/
TIM_InternalClockConfig(TIM2);
/*这里通过ARR,PSC,CCR的值来计算计时频率和占空比的值*/
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInitStructure.TIM_Period = 100 - 1; //ARR
TIM_TimeBaseInitStructure.TIM_Prescaler = 720 - 1; //PSC
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;/*确定占空比*/
TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStructure);
/*这里配置输出比较单元*/
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_OCStructInit(&TIM_OCInitStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCNPolarity_High;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = 0; //CCR的值
/*输出PWM波形的GPIO口的初始化*/
TIM_OC1Init(TIM2,&TIM_OCInitStructure); /*非常重要且容易忘记,配置好PWM的gpio口后一定要记得初始化*/
/*使能TIM2*/
TIM_Cmd(TIM2,ENABLE);
}为了方便起见,在这个函数的下面再封装一个函数(是用来自己改变占空比的)
/*封装TIM的通道的调用函数,不封装也可以,看自己情况*/
void PWM_TIM2_SetCompare1(uint16_t Compare) //TIM2 的通道1
{
TIM_SetCompare1(TIM2,Compare);/*很重要,改变占空比参数就靠这个函数*/
}以上的这两个函数,都是放在.c文件里的,你可以自己在建一个.h文件来声明一下这两个函数
如图
#ifndef _PWM_H
#define _PWM_H
void PWM_TIM2_Init(void);
void PWM_TIM2_SetCompare1(uint16_t Compare);
#endif聊到这里,PWM初始化就完成了,代码注释里面也有比较详细的解释。
最后就可以调用void PWM_TIM2_SetCompare1(uint16_t Compare)这个函数,自更改参数来改变速度的方向了。以下是我的小车动作函数的封装(里面有TIM3,因为我使用了两个时钟)
下面这个是PWM.c
#include "stm32f10x.h" // Device header
#include "PWM.h"
void PWM_TIM2_Init(void)/*配置TIM用来输出PWM波形时,要参考使用手册,因为它的GPIO口是官方确定的*/
{
/*打开TIM和GPIO的时钟*/
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
/*配置GPIO的输出模式、GPIO口、频率*/
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;/*复用推挽输出*/
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);/*GPIO初始化*/
/**/
TIM_InternalClockConfig(TIM2);
/*这里通过ARR,PSC,CCR的值来计算计时频率和占空比的值*/
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInitStructure.TIM_Period = 100 - 1; //ARR
TIM_TimeBaseInitStructure.TIM_Prescaler = 720 - 1; //PSC
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;/*确定占空比*/
TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStructure);
/*这里配置输出比较单元*/
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_OCStructInit(&TIM_OCInitStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCNPolarity_High;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = 0; //CCR的值
/*输出PWM波形的GPIO口的初始化*/
TIM_OC1Init(TIM2,&TIM_OCInitStructure); /*非常重要且容易忘记,配置好PWM的gpio口后一定要记得初始化*/
/*使能TIM2*/
TIM_Cmd(TIM2,ENABLE);
}
void PWM_TIM3_Init(void)/*这个是TIM3的配置,和上面的说明一样*/
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);
TIM_InternalClockConfig(TIM3);
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInitStructure.TIM_Period = 100 - 1; //ARR
TIM_TimeBaseInitStructure.TIM_Prescaler = 720 - 1; //PSC
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM3,&TIM_TimeBaseInitStructure);
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_OCStructInit(&TIM_OCInitStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCNPolarity_High;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = 0; //CCR的值
TIM_OC1Init(TIM3,&TIM_OCInitStructure);
TIM_Cmd(TIM3,ENABLE);
}
/*封装TIM的通道的调用函数,不封装也可以,看自己情况*/
void PWM_TIM2_SetCompare1(uint16_t Compare) //TIM2 的通道1
{
TIM_SetCompare1(TIM2,Compare);/*很重要,改变占空比参数就靠这个函数*/
}
void PWM_TIM3_SetCompare1(uint16_t Compare) //TIM3 的通道1
{
TIM_SetCompare1(TIM3,Compare);
}下面这个是PWM.h
#ifndef _PWM_H
#define _PWM_H
void PWM_TIM2_Init(void);
void PWM_TIM3_Init(void);
void PWM_TIM2_SetCompare1(uint16_t Compare);
void PWM_TIM3_SetCompare1(uint16_t Compare);
#endif下面这个是Motor.c
#include "stm32f10x.h" // Device header
#include "Motor.h"
#include "PWM.h"
void Motor_R_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2|GPIO_Pin_3;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);
PWM_TIM2_Init();
}
void Motor_L_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4|GPIO_Pin_5;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);
PWM_TIM3_Init();
}
void Motor_R_SetSpeed(int8_t Speed)
{
if(Speed>=0)
{
GPIO_SetBits(GPIOA,GPIO_Pin_2);
GPIO_ResetBits(GPIOA,GPIO_Pin_3);
PWM_TIM2_SetCompare1(Speed);
}
else
{
GPIO_SetBits(GPIOA,GPIO_Pin_3);
GPIO_ResetBits(GPIOA,GPIO_Pin_2);
PWM_TIM2_SetCompare1(-Speed);
}
}
void Motor_l_SetSpeed(int8_t Speed)
{
if(Speed>=0)
{
GPIO_SetBits(GPIOA,GPIO_Pin_4);
GPIO_ResetBits(GPIOA,GPIO_Pin_5);
PWM_TIM3_SetCompare1(Speed);
}
else
{
GPIO_SetBits(GPIOA,GPIO_Pin_5);
GPIO_ResetBits(GPIOA,GPIO_Pin_4);
PWM_TIM3_SetCompare1(-Speed);
}
}
下面这个是Motor.h
#ifndef _Motor_H
#define _Motor_H
void Motor_R_Init(void);
void Motor_L_Init(void);
void Motor_R_SetSpeed(int8_t Speed);
void Motor_l_SetSpeed(int8_t Speed);
#endif
下面这个是Car.c
#include "stm32f10x.h" // Device header
#include "Car.h"
#include "Motor.h"
void Car_Forword(uint8_t Speed)
{
Motor_R_SetSpeed(Speed);
Motor_l_SetSpeed(Speed);
}
void Car_Back(uint8_t Speed)
{
Motor_R_SetSpeed(-Speed);
Motor_l_SetSpeed(-Speed);
}
void Car_Left(uint8_t Speed)
{
Motor_R_SetSpeed(Speed);
Motor_l_SetSpeed(-Speed);
}
void Car_Right(uint8_t Speed)
{
Motor_R_SetSpeed(-Speed);
Motor_l_SetSpeed(Speed);
}
void Car_Stop(void)
{
Motor_R_SetSpeed(0);
Motor_l_SetSpeed(0);
}
最后这个是Car.h
#ifndef _Car_H
#define _Car_H
void Car_Forword(uint8_t Speed);
void Car_Back(uint8_t Speed);
void Car_Left(uint8_t Speed);
void Car_Right(uint8_t Speed);
void Car_Stop(void);
#endif代码部分结束了,这里得反思一下我自己,最近7天一直看这个PWM调速的视频,花这么长的时间是因为我的理论部分不扎实,总想自己调试出来,结果自己一顿乱操作,搞得自己也非常烦,当自己静下心来去查资料学习了理论知识后,清楚了思路,一个个看似压得我喘不过气的问题都是不足一提的小问题,今后的学习中,一定要注重理论知识的积累,再加实践!
现在是2022年12月31日19:11 ,祝大家跨年快乐哦,也感谢B站“江科大自化协”的教学视频。
我去玩狼人杀去了!!!!
文章目录1.开发板选择*用到的资源2.串口通信(个人理解)3.代码分析(注释比较详细)1.主函数2.串口1配置3.串口2配置以及中断函数4.注意问题5.源码链接1.开发板选择我用的是STM32F103RCT6的板子,不过代码大概在F103系列的板子上都可以运行,我试过在野火103的霸道板上也可以,主要看一下串口对应的引脚一不一样就行了,不一样的就更改一下。*用到的资源keil5软件这里用到了两个串口资源,采集数据一个,串口通信一个,板子对应引脚如下:串口1,TX:PA9,RX:PA10串口2,TX:PA2,RX:PA32.串口通信(个人理解)我就从串口采集传感器数据这个过程说一下我自己的理解,
LL库和HAL库简介LL:Low-Layer,底层库HAL:HardwareAbstractionLayer,硬件抽象层库LL库和hal库对比,很精简,这实际上是一个精简的库。LL库的配置选择如下:在STM32CUBEMX中,点击菜单的“ProjectManager”–>“AdvancedSettings”,在下面的界面中选择“AdvancedSettings”,然后在每个模块后面选择使用的库总结:1、如果使用的MCU是小容量的,那么STM32CubeLL将是最佳选择;2、如果结合可移植性和优化,使用STM32CubeHAL并使用特定的优化实现替换一些调用,可保持最大的可移植性。另外HAL和L
按照目前的情况,这个问题不适合我们的问答形式。我们希望答案得到事实、引用或专业知识的支持,但这个问题可能会引发辩论、争论、投票或扩展讨论。如果您觉得这个问题可以改进并可能重新打开,visitthehelpcenter指导。关闭10年前。在我在网上找到的每个基准测试中,Ruby似乎都很慢,比Java慢得多。Ruby的人只是说这无关紧要。您能举个例子说明RubyonRails(以及Ruby本身)的速度真的无关紧要吗?
目录一、ESP32简单介绍二、ESP32Wi-Fi模块介绍三、ESP32Wi-Fi编程模型四、ESP32Wi-Fi事件处理流程 五、ESP32Wi-Fi开发环境六、ESP32Wi-Fi具体代码七、ESP32Wi-Fi代码解读6.1主程序app_main7.2自定义代码wifi_init_sta()八、ESP32Wi-Fi连接验证8.1测试方法8.2服务器模拟工具sscom58.3测试代码8.4测试结果前言为了开发一款亚马逊物联网产品,开始入手ESP32模块。为了能够记录自己的学习过程,特记录如下操作过程。一、ESP32简单介绍ESP32是一套Wi-Fi(2.4GHz)和蓝牙(4.2)双模解决方
HTTP缓存是指浏览器或者代理服务器将已经请求过的资源保存到本地,以便下次请求时能够直接从缓存中获取资源,从而减少网络请求次数,提高网页的加载速度和用户体验。缓存分为强缓存和协商缓存两种模式。一.强缓存强缓存是指浏览器直接从本地缓存中获取资源,而不需要向web服务器发出网络请求。这是因为浏览器在第一次请求资源时,服务器会在响应头中添加相关缓存的响应头,以表明该资源的缓存策略。常见的强缓存响应头如下所述:Cache-ControlCache-Control响应头是用于控制强制缓存和协商缓存的缓存策略。该响应头中的指令如下:max-age:指定该资源在本地缓存的最长有效时间,以秒为单位。例如:Ca
有道无术,术尚可求,有术无道,止于术。本系列SpringBoot版本3.0.4本系列SpringSecurity版本6.0.2本系列SpringAuthorizationServer版本1.0.2源码地址:https://gitee.com/pearl-organization/study-spring-security-demo文章目录前言1.OAuth2AuthorizationServerMetadataEndpointFilter2.OAuth2AuthorizationEndpointFilter3.OidcProviderConfigurationEndpointFilter4.N
我有这段代码:date_counter=Time.mktime(2011,01,01,00,00,00,"+05:00")@weeks=Array.new(date_counter..Time.now).step(1.week)do|week|logger.debug"WEEK:"+week.inspect@weeks从技术上讲,代码有效,输出:SatJan0100:00:00-05002011SatJan0800:00:00-05002011SatJan1500:00:00-05002011etc.但是执行时间完全是垃圾!每周计算大约需要四秒钟。我在这段代码中是否遗漏了一些奇怪的低效
在我的代码中,我需要使用各种算法(包括CRC32)对文件进行哈希处理。因为我还在Digest系列中使用其他加密哈希函数,所以我认为为它们维护一个一致的接口(interface)会很好。为了记录,我确实找到了digest-crc,一颗完全符合我要求的gem。问题是,Zlib是标准库的一部分,并且有一个我想重用的CRC32工作实现。此外,它是用C编写的,因此它应该提供与digest-crc相关的卓越性能,后者是纯ruby实现。实现Digest::CRC32一开始看起来非常简单:%w(digestzlib).each{|f|requiref}classDigest::CRC32一切正常:
我正在尝试在我的机器上安装win32-apigem,但在构建native扩展时我遇到了一些问题:$geminstallwin32-api--no-ri--rdocTemporarilyenhancingPATHtoincludeDevKit...Buildingnativeextensions.Thiscouldtakeawhile...C:\Programs\dev_kit\bin\make.exe:***Couldn'treservespaceforcygwin'sheap,Win32error0ERROR:Errorinstallingwin32-api:ERROR:Failed
我在Windows上运行ruby1.9.2并试图移植在Ruby1.8中工作的代码。该代码使用以前运行良好的Open4.popen4。对于1.9.2,我做了以下事情:通过geminstallPOpen4安装了POpen4需要POpen4通过require'popen4'尝试像这样使用POpen4:Open4.popen4("cmd"){|io_in,io_out,io_er|...}当我这样做时,我得到了错误:nosuchfiletoload--win32/open3如果我尝试安装win32-open3(geminstallwin32-open3),我会收到错误消息:win32-op