2.4 精确率(Accuracy)和正确率(Precision)的区别
在机器学习领域,混淆矩阵(Confusion Matrix),又称为可能性矩阵或错误矩阵。混淆矩阵是可视化工具,特别用于监督学习,在无监督学习一般叫做匹配矩阵。在图像精度评价中,主要用于比较分类结果和实际测得值,可以把分类结果的精度显示在一个混淆矩阵里面。
混淆矩阵的结构一般如下图表示的方法。
混淆矩阵要表达的含义:
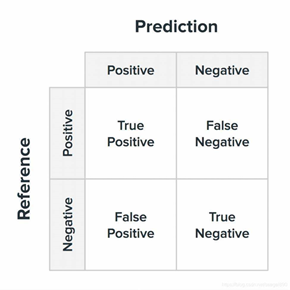
True Positive(TP):真正类。样本的真实类别是正类,并且模型识别的结果也是正类。
False Negative(FN):假负类。样本的真实类别是正类,但是模型将其识别为负类。
False Positive(FP):假正类。样本的真实类别是负类,但是模型将其识别为正类。
True Negative(TN):真负类。样本的真实类别是负类,并且模型将其识别为负类。
该矩阵可用于易于理解的二类分类问题,但通过向混淆矩阵添加更多行和列,可轻松应用于具有3个或更多类值的问题。
举例
如有150个样本数据,预测为类I,类II,类III 各为50个。分类结束后得到的混淆矩阵为:
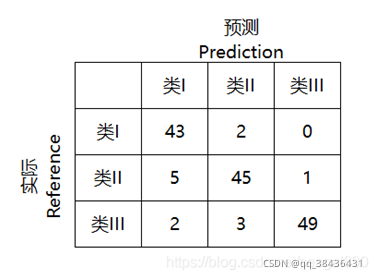
每一行之和表示该类别的真实样本数量,每一列之和表示被预测为该类别的样本数量。
第一行第一列中的43表示有43个实际归属第一类的实例被预测为第一类,同理,第一行第二列的2表示有2个实际归属为第一类的实例被错误预测为第二类。
混淆矩阵是对分类问题的预测结果的总结。使用计数值汇总正确和不正确预测的数量,并按每个类进行细分,这是混淆矩阵的关键所在。混淆矩阵显示了分类模型的在进行预测时会对哪一部分产生混淆。它不仅可以让您了解分类模型所犯的错误,更重要的是可以了解哪些错误类型正在发生。正是这种对结果的分解克服了仅使用分类准确率所带来的局限性。
从混淆矩阵当中,可以得到更高级的分类指标:Accuracy(精确率),Precision(正确率或者准确率),Recall(召回率),Specificity(特异性),Sensitivity(灵敏度)。
精确率是最常用的分类性能指标。可以用来表示模型的精度,即模型识别正确的个数/样本的总个数。一般情况下,模型的精度越高,说明模型的效果越好。
Accuracy = (TP+TN)/(TP+FN+FP+TN)
又称为查准率,表示在模型识别为正类的样本中,真正为正类的样本所占的比例。一般情况下,查准率越高,说明模型的效果越好。
Precision = TP/(TP+FP)
又称为查全率,召回率表现出在实际正样本中,分类器能预测出多少。
Recall(召回率) = Sensitivity(敏感指标,True Positive Rate,TPR)= 查全率
表示的是,模型正确识别出为正类的样本的数量占总的正类样本数量的比值。一般情况下,Recall越高,说明有更多的正类样本被模型预测正确,模型的效果越好。
Recall = TP/(TP+FN)
查准率和查全率是一对矛盾的指标。一般来说,查准率高时,查全率旺旺偏低;二查全率高时,查准率往往偏低。
Accuracy,不管是哪个类别,只要预测正确,其数量都放在分子上,而分母是全部数据量,说明这个精确率是对全部数据的判断。
而正确率在分类中对应的是某个类别,分子是预测该类别正确的数量,分母是预测为该类别的全部的数量。
或者说,Accuracy是对分类器整体上的精确率的评价,而Precision是分类器预测为某一个类别的精确的评价。
特异性指标,表示的是模型识别为负类的样本的数量,占总的负类样本数量的比值。
负正类率(False Positive Rate, FPR),计算公式为:FPR=FP/(TN+FP),计算的是模型错识别为正类的负类样本占所有负类样本的比例,一般越低越好。
Specificity = 1 - FPR
Fβ的物理意义就是将正确率和召回率的一种加权平均,在合并的过程中,召回率的权重是正确率的β倍。
F1分数认为召回率和正确率同等重要,F2分数认为召回率的重要程度是正确率的2倍,而F0.5分数认为召回率的重要程度是正确率的一半。比较常用的是F1分数(F1 Score),是统计学中用来衡量二分类模型精确度的一种指标。
F1_Score:数学定义为 F1分数(F1-Score),又称为平衡 F分数(Balanced Score),它被定义为正确率和召回率的调和平均数。在 β=1 的情况,F1-Score的值是从0到1的,1是最好,0是最差。
因此我们知道,计算Precision,Recall,Specificity等只是计算某一分类的特性,而Accuracy和F1-Score是判断分类模型总体的标准。
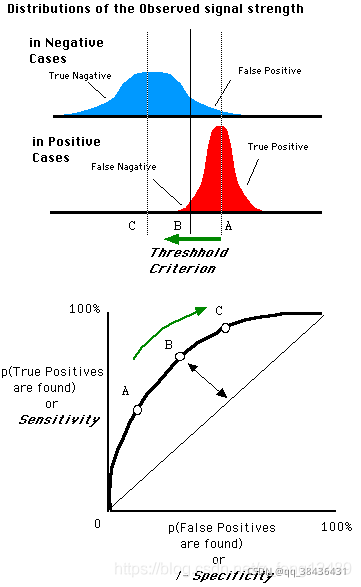
ROC 曲线
横坐标 :1-Specificity,伪正类率(False positive rate,FPR),预测为正但实际为负的样本占所有负例样本的比例。
纵坐标: Sensitivity,真正类率(True positive rate,TPR),预测为正且实际为正的样本占所有正例样本 的比例。
在一个二分类模型中,假设采用逻辑回归分类器,其给出针对每个实例为正类的概率,那么通过设定一个阈值如0.6,概率大于等于0.6的为正类,小于0.6的为负类。对应的就可以算出一组(FPR,TPR),在平面中得到对应坐标点。随着阈值的逐渐减小,越来越多的实例被划分为正类,但是这些正类中同样也掺杂着真正的负实例,即TPR和FPR会同时增大。阈值最大时,对应坐标点为(0,0),阈值最小时,对应坐标点(1,1)。
如下面这幅图,(a)图中实线为ROC曲线,线上每个点对应一个阈值。
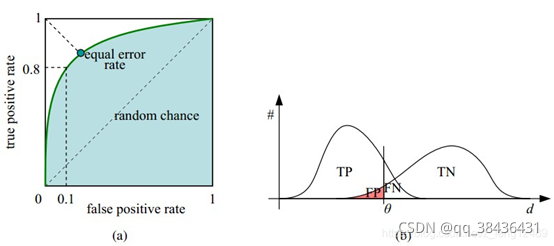
① 理想情况下,TPR应该接近1,FPR应该接近0。ROC曲线上的每一个点对应于一个threshold,对于一个分类器,每个threshold下会有一个TPR和FPR。比如Threshold最大时,TP=FP=0,对应于原点;Threshold最小时,TN=FN=0,对应于右上角的点(1,1)。
② P和N得分不作为特征间距离d的一个函数,随着阈值theta增加,TP和FP都增加。
对于一个特定的分类器和测试数据集,显然只能得到一个分类结果,即一组FPR和TPR结果,而要得到一个曲线,我们实际上需要一系列FPR和TPR的值,这又是如何得到的呢?我们先来看一下Wikipedia上对ROC曲线的定义:
In signal detection theory, a receiver operating characteristic (ROC), or simply ROC curve, is a graphical plot which illustrates the performance of a binary classifier system as its discrimination threshold is varied.
问题在于"as its discrimination threashold is varied"。如何理解这里的"discrimination threashold"呢?我们忽略了分类器的一个重要功能"概率输出",即表示分类器认为某个样本具有多大的概率属于正样本(或负样本)。通过更深入地了解各个分类器的内部机理,我们总能想办法得到一种概率输出。通常来说,是将一个实数范围通过某个变换映射到(0,1)区间。
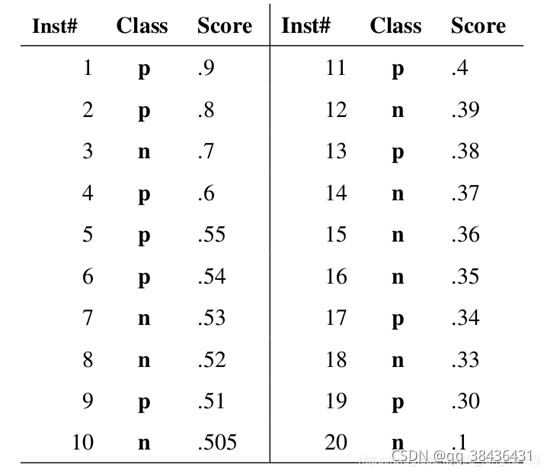
假如我们已经得到了所有样本的概率输出(属于正样本的概率),现在的问题是如何改变"discrimination threashold"?我们根据每个测试样本属于正样本的概率值从大到小排序。下图是一个示例,图中共有20个测试样本,"Class"一栏表示每个测试样本真正的标签(p表示正样本,n表示负样本),"Score"表示每个测试样本属于正样本的概率。
接下来,我们从高到低,依次将"Score"值作为阈值threshold,当测试样本属于正样本的概率大于或等于这个threshold时,我们认为它为正样本,否则为负样本。举例来说,对于图中的第4个样本,其"Score"值为0.6,那么样本1,2,3,4都被认为是正样本,因为它们的"Score"值都大于等于0.6,而其他样本则都认为是负样本。每次选取一个不同的threshold,我们就可以得到一组FPR和TPR,即ROC曲线上的一点。这样一来,我们一共得到了20组FPR和TPR的值,将它们画在ROC曲线的结果如下图:
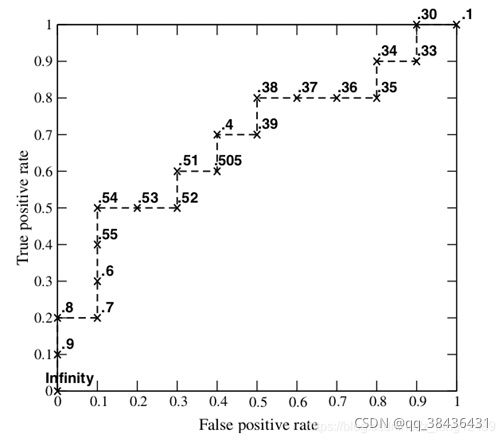
当我们将threshold设置为1和0时,分别可以得到ROC曲线上的(0,0)和(1,1)两个点。将这些(FPR,TPR)对连接起来,就得到了ROC曲线。当threshold取值越多,ROC曲线越平滑。
其实,我们并不一定要得到每个测试样本是正样本的概率值,只要得到这个分类器对该测试样本的"评分值"即可(评分值并不一定在(0,1)区间)。评分越高,表示分类器越肯定地认为这个测试样本是正样本,而且同时使用各个评分值作为threshold。我认为将评分值转化为概率更易于理解一些。
AUC (Area Under Curve) 被定义为ROC曲线下的面积,显然这个面积的数值不会大于1。又由于ROC曲线一般都处于y=x这条直线的上方,所以AUC的取值范围一般在0.5和1之间。使用AUC值作为评价标准是因为很多时候ROC曲线并不能清晰的说明哪个分类器的效果更好,而作为一个数值,对应AUC更大的分类器效果更好。
AUC的计算有两种方式,梯形法和ROC AUCH法,都是以逼近法求近似值,具体见wikipedia。
那么AUC值的含义是什么呢?根据(Fawcett, 2006),AUC的值的含义是:
The AUC value is equivalent to the probability that a randomly chosen positive example is ranked higher than a randomly chosen negative example.
这句话有些绕,我尝试解释一下:首先AUC值是一个概率值,当你随机挑选一个正样本以及一个负样本,当前的分类算法根据计算得到的Score值将这个正样本排在负样本前面的概率就是AUC值。当然,AUC值越大,当前的分类算法越有可能将正样本排在负样本前面,即能够更好的分类。
从AUC判断分类器(预测模型)优劣的标准:
AUC = 1,是完美分类器,采用这个预测模型时,存在至少一个阈值能得出完美预测。绝大多数预测的场合,不存在完美分类器。
0.5< AUC <1,优于随机猜测。这个分类器(模型)妥善设定阈值的话,能有预测价值。
AUC = 0.5,跟随机猜测一样(例:丢铜板),模型没有预测价值。
AUC <0.5,比随机猜测还差;但只要总是反预测而行,就优于随机猜测。
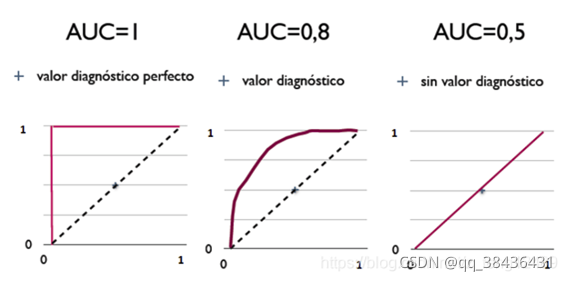
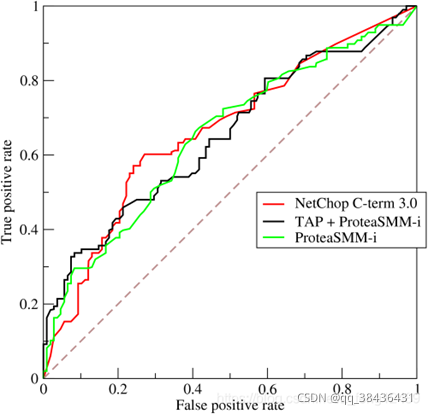
4.3 三种 AUC 值示例:
简单说:AUC值越大的分类器,正确率越高。
为什么使用 ROC 曲线
既然已经这么多评价标准,为什么还要使用ROC和AUC呢?因为ROC曲线有个很好的特性:当测试集中的正负样本的分布变化的时候,ROC曲线能够保持不变。在实际的数据集中经常会出现类不平衡(class imbalance)现象,即负样本比正样本多很多(或者相反),而且测试数据中的正负样本的分布也可能随着时间变化。下图是ROC曲线和Precision-Recall曲线的对比:
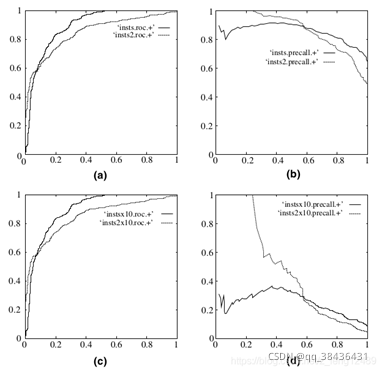
标准,为什么还要使用ROC和AUC呢?因为ROC曲线有个很好的特性:当测试集中的正负样本的分布变化的时候,ROC曲线能够保持不变。在实际的数据集中经常会出现类不平衡(class imbalance)现象,即负样本比正样本多很多(或者相反),而且测试数据中的正负样本的分布也可能随着时间变化。下图是ROC曲线和Precision-Recall曲线的对比:
在上图中,(a)和©为ROC曲线,(b)和(d)为Precision-Recall曲线。(a)和(b)展示的是分类其在原始测试集(正负样本分布平衡)的结果,©和(d)是将测试集中负样本的数量增加到原来的10倍后,分类器的结果。可以明显的看出,ROC曲线基本保持原貌,而Precision-Recall曲线则变化较大。
点向量坐标矩阵的几何意义介绍旋转矩阵的几何含义之前,先介绍一下点向量坐标矩阵的几何含义点:在一维空间下就是一个标量,如同一条直线上,以任意某一个位置为0点,以一定的尺度间隔为1,2,3...,相反方向为-1,-2,-3...;如此就形成了一维坐标系,这时候任何一个点都可以用一个数值表示,如点p1=5,即即从原点出发沿着x轴正方向移动5个尺度;点p2=-3,负方向移动3个尺度; 在一维坐标系上过原点做垂直于一维坐标系的直线,则形成了二维坐标系,此时描述一个点需要两个数值来表示点p3=(3,2),即从原点出发沿着x轴正方向移动3个尺度,在此基础上沿着y轴正方向移动两个尺度的位置就是点p3。
我在Ruby中遇到了一个关于Dir[]和File.join()的简单程序,blobs_dir='/path/to/dir'Dir[File.join(blobs_dir,"**","*")].eachdo|file|FileUtils.rm_rf(file)ifFile.symlink?(file)我有两个困惑:首先,File.join(@blobs_dir,"**","*")中的第二个和第三个参数是什么意思?其次,Dir[]在Ruby中有什么用?我只知道它等价于Dir.glob(),但是,我对Dir.glob()确实不是很清楚。 最佳答案
所有题目均有五种语言实现。C实现目录、C++实现目录、Python实现目录、Java实现目录、JavaScript实现目录题目n行m列的矩阵,每个位置上有一个元素你可以上下左右行走,代价是前后两个位置元素值差的绝对值.另外,你最多可以使用一次传送阵(只能从一个数跳到另外一个相同的数)求从走上角走到右下角最少需要多少时间。输入描述:第一行两个整数n,m,分别代表矩阵的行和列。后面n行,每行m个整数,分别代表矩阵中的元素。输出描述:一个整数,表示最少需要多少时间。
请有人帮助我了解ruby应用程序如何管理应用程序的gemfile和rvmgemsets。如果我当前使用的是Gemset,安装了一堆gem,并且我的gemfile中也有gems,那么Ruby应用程序是使用gemfile中的gem还是应用程序的gemset中的gem? 最佳答案 要理解这一点,您需要退后一步,了解rubygems的一般工作原理。让我们从一个没有rvm或Gemfile的系统开始。当您通过“geminstall”安装gem时,它会进入系统gem位置。每当您编写ruby脚本并需要gem时,它就会从那里获取。现在假设
一、习惯约定图片来自PSINS(高精度捷联惯导算法)PSINS工具箱入门与详解.pptx二、基本旋转矩阵绕x轴逆时钟旋转α\alphaα角度Rx(α)=[ 1000cosαsinα0−sinαcosα]R_x(\alpha)=\begin{bmatrix}\1&0&0\\0&\cos\alpha&\sin\alpha\\0&-\sin\alpha&\cos\alpha\end{bmatrix}Rx(α)= 1000cosα−sinα0sinαcosα绕y轴逆时钟旋转α\alphaα角度Ry(α)=[ cosα0−sinα010sinα0cosα]R_y(\alpha
欧拉角、旋转矩阵及四元数1.简介2.欧拉角2.1欧拉角定义2.2右手系和左手系2.3转换流程3.旋转矩阵4.四元数4.1四元数与欧拉角和旋转矩阵之间等效变换4.2测试Matlab代码5.总结1.简介常用姿态参数表达方式包括方向余弦矩阵、欧拉轴/角参数、欧拉角、四元数以及罗德里格参数等。高分辨率光学遥感卫星主要采用欧拉角与四元数对姿态参数进行描述。这里着重讲解欧拉角、旋转矩阵和四元数。2.欧拉角2.1欧拉角定义欧拉角是表征刚体旋转的一种方法之一,由莱昂哈德·欧拉引入的三个角度,用于描述刚体相对于固定坐标系的方向。在摄影测量、空间科学或其它技术领域,一般用一组(三个)欧拉角描述两个空间坐标之间的旋
目录一、什么是Websocket二、WebSocket部分header介绍三、HTTPVSWebSocket四、什么时候使用WebSockets五、关于SockJS和STOMP一、什么是Websocket根据RFC6455标准,Websocket协议提供了一种标准化的方式在客户端和服务端之间通过TCP连接建立全双工、双向通信渠道。它是一种不同于HTTP的TCP协议,但是被设计为在HTTP基础上运行。Websocket交互始于HTTP请求,该请求会通过HTTPUpgrade请求头去升级请求,进而切换到Websocket协议。请求报文如下:GET/spring-websocket-portfoli
ChatGPT掀起了AI股历史上最疯狂的一轮市值狂飙。自春节后至今,ChatGPT概念股开始了暴走模式,短短半月时间,海天瑞声、开普云等ChatGPT概念股市值累计增加了近1400亿。如此的爆炸效应,得益于ChatGPT所展现出商业化落地的巨大潜力。要知道,在此之前,无论是十年AI投入超千亿的百度,还是困在硬件化里的AI四小龙,都在重复着AI商业化难落地的故事。ChatGPT的出现,让AI从生产力的赋能者直接成为一种创造生产力的工具。随着订阅模式的推出,ChatGPT已经成为第一个以AI技术为核心直接变现的消费者应用。本文持有以下核心观点:1、ChatGPT是AI技术迭代的受益者。过去受限技术
我理解RubystdlibMatrix是不可修改的,也就是说,例如。m=Matrix.zero(3,4)不会写m[0,1]=7但我非常想做...我可以用笨拙的编程来做,比如defmodify_value_in_a_matrix(matrix,row,col,newval)ary=(0...m.row_size).map{|i|m.rowi}.map(&:to_a)ary[row][col]=newvalMatrix[*ary]end...或者作弊,比如Matrix.send:[]=,0,1,7但我想知道,这一定是人们一直遇到的问题。有没有一些标准的、习惯的方法可以做到这一点,而不必使用
快速求三阶矩阵的逆矩阵前言一般情况下,我们求解伴随矩阵是要注意符号问题和位置问题的(如下所示)A−1=1[ ][−[ ]−[ ]−[ ] −[ ]]=A−1=1[ ][ M11−[M12] M13−[M21] M22−[M23] M31−[M32] M33]⊤\begin{aligned}&A^{-1}=\frac{1}{[\\]}\left[\begin{array}{cccccc}&-[\\]&\\-[\\]&&-[\\]\\\\&-[\\]&\\\end{array}\right]=\\\\&A^{-1}=\frac{1}{[\\]}\left[\b