三次多项式轨迹规划就是s(t)相对于时间t的变化满足三次多项式变化,其表达式如下:

如前文所述:t的取值范围是[0,T],s(t)的取值范围是[0,1], 又因为初始速度和末速度都为0,所以:

S(t)的一阶导数表达式为:

从而可以计算出对应的系数:

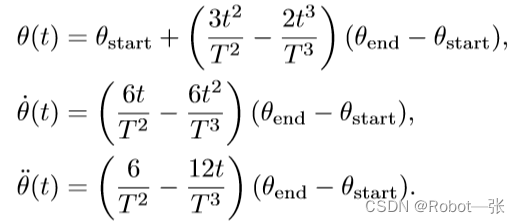
将系数带入到上面的三次多项式,可得到

再将上式代入到路径表达式,即可得到完整的轨迹规划表达式,如下所示:
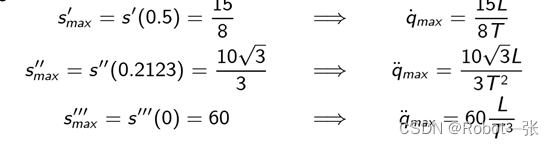
其中,最大的关节速度在 时刻到达,其数值为:
时刻到达,其数值为:

最大的关节加速度和关节减速度在 和
和 ,其中:
,其中:

TH1=[30,60,2,5,50,70,80]; %定义关节空间中的两个点TH1,TH2.
TH2=[90,54,3,60,80,40,60];
T=1;%定以一个时间,即从TH1到TH2的总时间。
TH=[];
TH_yijie=[];
TH_erjie=[];
TT=[];%定以四个变量TH、TH_yijie、TH_erjie、TT,用来储存数据
for t=0:0.001:T
th=TH1+(TH2-TH1)*(3*t^2/T^2-2*t^3/T^3);%角度和时间变化关系
th_yijie=(TH2-TH1)*(6*t/T^2-6*t^2/T^3);%角速度和时间变化关系
th_erjie=(TH2-TH1)*(6/T^2-12*t/T^3);%角加速度和时间变化关系
TH=[TH,th'];
TH_yijie=[TH_yijie,th_yijie'];
TH_erjie=[TH_erjie,th_erjie'];
TT=[TT,t];
end
TH=TH';%矩阵转置
TH_yijie=TH_yijie';
TH_erjie=TH_erjie';
TT=TT';
fig1=figure;
plot(TT,TH(:,1));%三维绘图此处绘制一轴关节角度变化示意。
grid on;
fig2=figure;
plot(TT,TH_yijie(:,1));%三维绘图此处绘制一轴关节角速度变化示意。
grid on;
fig3=figure;
plot(TT,TH_erjie(:,1));%三维绘图此处绘制一轴关节角加速度变化示意。
grid on;
A=[30,60,2]; %定义笛卡尔空间中的两个点A,B.
B=[90,54,3];
T=1;%定义一个时间,即从A到B的总时间。
X=[];
X_yijie=[];
X_erjie=[];
TT=[];%定以四个变量X、X_yijie、X_erjie、TT,用来储存数据
for t=0:0.001:T
x=A+(B-A)*(3*t^2/T^2-2*t^3/T^3);%角度和时间变化关系
x_yijie=(B-A)*(6*t/T^2-6*t^2/T^3);%角速度和时间变化关系
x_erjie=(B-A)*(6/T^2-12*t/T^3);%角加速度和时间变化关系
X=[X,x'];
X_yijie=[X_yijie,x_yijie'];
X_erjie=[X_erjie,x_erjie'];
TT=[TT,t];
end
X=X';%矩阵转置
X_yijie=X_yijie';
X_erjie=X_erjie';
TT=TT';
fig1=figure;
plot(TT,X(:,1));%三维绘图此处绘制x方向位移变化示意。
grid on;
fig2=figure;
plot(TT,X_yijie(:,1));%三维绘图此处绘制x方向速度变化示意。
grid on;
fig3=figure;
plot(TT,X_erjie(:,1));%三维绘图此处绘制x方向加速度变化示意。
grid on;
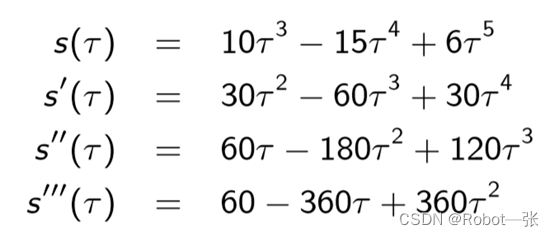
五次多项式轨迹规划就是s(t)相对于时间t的变化满足五次多项式变化,其表达式如下:

其中:

求出系数如下:

所以其运动方程如下:
各个变量的最值如下:
TH1=[30,60,2,5,50,70,80]; %定义关节空间中的两个点TH1,TH2.
TH2=[90,54,3,60,80,40,60];
T=1;%定以一个时间,即从TH1到TH2的总时间。
TH=[];
TH_yijie=[];
TH_erjie=[];
TT=[];%定以四个变量TH、TH_yijie、TH_erjie、TT,用来储存数据
for t=0:0.001:T
th=TH1+(TH2-TH1)*(10*(t/T)^3-15*(t/T)^4+6*(t/T)^5);%角度和时间变化关系
th_yijie=(TH2-TH1)*(30*(t/T)^2-60*(t/T)^3+30*(t/T)^4);%角速度和时间变化关系
th_erjie=(TH2-TH1)*(60*(t/T)-180*(t/T)^2+120*(t/T)^3);%角加速度和时间变化关系
TH=[TH,th'];
TH_yijie=[TH_yijie,th_yijie'];
TH_erjie=[TH_erjie,th_erjie'];
TT=[TT,t];
end
TH=TH';%矩阵转置
TH_yijie=TH_yijie';
TH_erjie=TH_erjie';
TT=TT';
fig1=figure;
plot(TT,TH(:,1));%三维绘图此处绘制一轴关节角度变化示意。
grid on;
fig2=figure;
plot(TT,TH_yijie(:,1));%三维绘图此处绘制一轴关节角速度变化示意。
grid on;
fig3=figure;
plot(TT,TH_erjie(:,1));%三维绘图此处绘制一轴关节角加速度变化示意。
grid on;
A=[30,60,2]; %定义笛卡尔空间中的两个点A,B.
B=[90,54,3];
T=1;%定义一个时间,即从A到B的总时间。
X=[];
X_yijie=[];
X_erjie=[];
TT=[];%定以四个变量X、X_yijie、X_erjie、TT,用来储存数据
for t=0:0.001:T
x=A+(B-A)*(10*(t/T)^3-15*(t/T)^4+6*(t/T)^5);%角度和时间变化关系
x_yijie=(B-A)*(30*(t/T)^2-60*(t/T)^3+30*(t/T)^4);%角速度和时间变化关系
x_erjie=(B-A)*(60*(t/T)-180*(t/T)^2+120*(t/T)^3);%角加速度和时间变化关系
X=[X,x'];
X_yijie=[X_yijie,x_yijie'];
X_erjie=[X_erjie,x_erjie'];
TT=[TT,t];
end
X=X';%矩阵转置
X_yijie=X_yijie';
X_erjie=X_erjie';
TT=TT';
fig1=figure;
plot(TT,X(:,1));%三维绘图此处绘制x方向位移变化示意。
grid on;
fig2=figure;
plot(TT,X_yijie(:,1));%三维绘图此处绘制x方向速度变化示意。
grid on;
fig3=figure;
plot(TT,X_erjie(:,1));%三维绘图此处绘制x方向加速度变化示意。
grid on;
五次多项式轨迹规划就是s(t)相对于时间t的变化满足五次多项式变化,其表达式如下:

其中:

求出系数如下:

所以其运动方程如下:
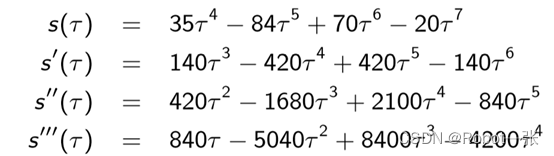
各个变量的最值如下:

TH1=[30,60,2,5,50,70,80]; %定义关节空间中的两个点TH1,TH2.
TH2=[90,54,3,60,80,40,60];
T=1;%定以一个时间,即从TH1到TH2的总时间。
TH=[];
TH_yijie=[];
TH_erjie=[];
TT=[];%定以四个变量TH、TH_yijie、TH_erjie、TT,用来储存数据
for t=0:0.001:T
th=TH1+(TH2-TH1)*(35*(t/T)^4-84*(t/T)^5+70*(t/T)^6-20*(t/T)^7);%角度和时间变化关系
th_yijie=(TH2-TH1)*(140*(t/T)^3-420*(t/T)^4+420*(t/T)^5-140*(t/T)^6);%角速度和时间变化关系
th_erjie=(TH2-TH1)*(420*(t/T)^2-1680*(t/T)^3+2100*(t/T)^4-840*(t/T)^5);%角加速度和时间变化关系
TH=[TH,th'];
TH_yijie=[TH_yijie,th_yijie'];
TH_erjie=[TH_erjie,th_erjie'];
TT=[TT,t];
end
TH=TH';%矩阵转置
TH_yijie=TH_yijie';
TH_erjie=TH_erjie';
TT=TT';
fig1=figure;
plot(TT,TH(:,1));%三维绘图此处绘制一轴关节角度变化示意。
grid on;
fig2=figure;
plot(TT,TH_yijie(:,1));%三维绘图此处绘制一轴关节角速度变化示意。
grid on;
fig3=figure;
plot(TT,TH_erjie(:,1));%三维绘图此处绘制一轴关节角加速度变化示意。
grid on;
A=[30,60,2]; %定义笛卡尔空间中的两个点A,B.
B=[90,54,3];
T=1;%定义一个时间,即从A到B的总时间。
X=[];
X_yijie=[];
X_erjie=[];
TT=[];%定以四个变量X、X_yijie、X_erjie、TT,用来储存数据
for t=0:0.001:T
x=A+(B-A)*(35*(t/T)^4-84*(t/T)^5+70*(t/T)^6-20*(t/T)^7);%角度和时间变化关系
x_yijie=(B-A)*(140*(t/T)^3-420*(t/T)^4+420*(t/T)^5-140*(t/T)^6);%角速度和时间变化关系
x_erjie=(B-A)*(420*(t/T)^2-1680*(t/T)^3+2100*(t/T)^4-840*(t/T)^5);%角加速度和时间变化关系
X=[X,x'];
X_yijie=[X_yijie,x_yijie'];
X_erjie=[X_erjie,x_erjie'];
TT=[TT,t];
end
X=X';%矩阵转置
X_yijie=X_yijie';
X_erjie=X_erjie';
TT=TT';
fig1=figure;
plot(TT,X(:,1));%三维绘图此处绘制x方向位移变化示意。
grid on;
fig2=figure;
plot(TT,X_yijie(:,1));%三维绘图此处绘制x方向速度变化示意。
grid on;
fig3=figure;
plot(TT,X_erjie(:,1));%三维绘图此处绘制x方向加速度变化示意。
grid on;
这似乎非常适得其反,因为太多的gem会在window上破裂。我一直在处理很多mysql和ruby-mysqlgem问题(gem本身发生段错误,一个名为UnixSocket的类显然在Windows机器上不能正常工作,等等)。我只是在浪费时间吗?我应该转向不同的脚本语言吗? 最佳答案 我在Windows上使用Ruby的经验很少,但是当我开始使用Ruby时,我是在Windows上,我的总体印象是它不是Windows原生系统。因此,在主要使用Windows多年之后,开始使用Ruby促使我切换回原来的系统Unix,这次是Linux。Rub
matlab打开matlab,用最简单的imread方法读取一个图像clcclearimg_h=imread('hua.jpg');返回一个数组(矩阵),往往是a*b*cunit8类型解释一下这个三维数组的意思,行数、数和层数,unit8:指数据类型,无符号八位整形,可理解为0~2^8的数三个层数分别代表RGB三个通道图像rgb最常用的是24-位实现方法,即RGB每个通道有256色阶(2^8)。基于这样的24-位RGB模型的色彩空间可以表现256×256×256≈1670万色当imshow传入了一个二维数组,它将以灰度方式绘制;可以把图像拆分为rgb三层,可以以灰度的方式观察它figure(1
我们目前正在为ROR3.2开发自定义cms引擎。在这个过程中,我们希望成为我们的rails应用程序中的一等公民的几个类类型起源,这意味着它们应该驻留在应用程序的app文件夹下,它是插件。目前我们有以下类型:数据源数据类型查看我在app文件夹下创建了多个目录来保存这些:应用/数据源应用/数据类型应用/View更多类型将随之而来,我有点担心应用程序文件夹被这么多目录污染。因此,我想将它们移动到一个子目录/模块中,该子目录/模块包含cms定义的所有类型。所有类都应位于MyCms命名空间内,目录布局应如下所示:应用程序/my_cms/data_source应用程序/my_cms/data_ty
MIMO技术的优缺点优点通过下面三个增益来总体概括:阵列增益。阵列增益是指由于接收机通过对接收信号的相干合并而活得的平均SNR的提高。在发射机不知道信道信息的情况下,MIMO系统可以获得的阵列增益与接收天线数成正比复用增益。在采用空间复用方案的MIMO系统中,可以获得复用增益,即信道容量成倍增加。信道容量的增加与min(Nt,Nr)成正比分集增益。在采用空间分集方案的MIMO系统中,可以获得分集增益,即可靠性性能的改善。分集增益用独立衰落支路数来描述,即分集指数。在使用了空时编码的MIMO系统中,由于接收天线或发射天线之间的间距较远,可认为它们各自的大尺度衰落是相互独立的,因此分布式MIMO
require"socket"server="irc.rizon.net"port="6667"nick="RubyIRCBot"channel="#0x40"s=TCPSocket.open(server,port)s.print("USERTesting",0)s.print("NICK#{nick}",0)s.print("JOIN#{channel}",0)这个IRC机器人没有连接到IRC服务器,我做错了什么? 最佳答案 失败并显示此消息::irc.shakeababy.net461*USER:Notenoughparame
文章目录1、自相关函数ACF2、偏自相关函数PACF3、ARIMA(p,d,q)的阶数判断4、代码实现1、引入所需依赖2、数据读取与处理3、一阶差分与绘图4、ACF5、PACF1、自相关函数ACF自相关函数反映了同一序列在不同时序的取值之间的相关性。公式:ACF(k)=ρk=Cov(yt,yt−k)Var(yt)ACF(k)=\rho_{k}=\frac{Cov(y_{t},y_{t-k})}{Var(y_{t})}ACF(k)=ρk=Var(yt)Cov(yt,yt−k)其中分子用于求协方差矩阵,分母用于计算样本方差。求出的ACF值为[-1,1]。但对于一个平稳的AR模型,求出其滞
目录0专栏介绍1平面2R机器人概述2运动学建模2.1正运动学模型2.2逆运动学模型2.3机器人运动学仿真3动力学建模3.1计算动能3.2势能计算与动力学方程3.3动力学仿真0专栏介绍?附C++/Python/Matlab全套代码?课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索、采样法、智能算法等);局部规划(DWA、APF等);曲线优化(贝塞尔曲线、B样条曲线等)。?详情:图解自动驾驶中的运动规划(MotionPlanning),附几十种规划算法1平面2R机器人概述如图1所示为本文的研究本体——平面2R机器人。对参数进行如下定义:机器人广义坐标
一、机器人介绍 此处是基于MATLABRVC工具箱,对ABB-IRB-1200型号的微型机械臂进行正逆向运动学分析,并利Simulink工具实现对机械臂进行具有动力学参数的末端轨迹规划仿真,最后根据机械模型设计Simulink-Adams联合仿真。 图1.ABBIRB 1200尺寸参数示意图ABBIRB 1200提供的两种型号广泛适用于各作业,且两者间零部件通用,两种型号的工作范围分别为700 mm 和 900 mm,大有效负载分别为 7 kg 和5 kg。 IRB 1200 能够在狭小空间内能发挥其工作范围与性能优势,具有全新的设计、小型化的体积、高效的性能、易于集成、便捷的接
2022年底,OpenAI的预训练模型ChatGPT给人工智能领域的爱好者和研究人员留下了深刻的印象和启发,他展现的惊人能力将人工智能的研究和应用热度推向高潮,网上也充斥着和ChatGPT的各种聊天,他可以作诗、写小说、写代码、讨论疫情问题等。下面就是一些他的神回复:人命关天的坑: 写歌,留给词作者的机会不多了。。。 回答人类怎么样面对人工智能: 什么是ChatGPT?借用网上的一段介绍,ChatGPT是由人工智能研究实验室OpenAI在2022年11月30日发布的全新聊天机器人模型,一款人工智能技术驱动的自然语言处理工具。它能够通过学习和理解人类的语言来进行对话,还能根据聊天的上下文进行互动
我正在为在AmazonEC2实例上运行的应用程序设计一个AutoScaling系统。应用程序从SQS读取消息并对其进行处理。AutoScaling系统将监控两件事:SQS中的消息数量,所有EC2机器上运行的进程总数。例如,如果SQS中的消息数量超过3000,我希望系统自动缩放,创建一个新的EC2实例,在其上部署代码,当消息数量低于2000时,我希望系统终止EC2实例.我正在用Ruby和Capistrano做这件事。我的问题是:我无法找到一种方法来确定在所有EC2机器上运行的进程数并将该数字保存在变量中。你能帮帮我吗? 最佳答案 您可