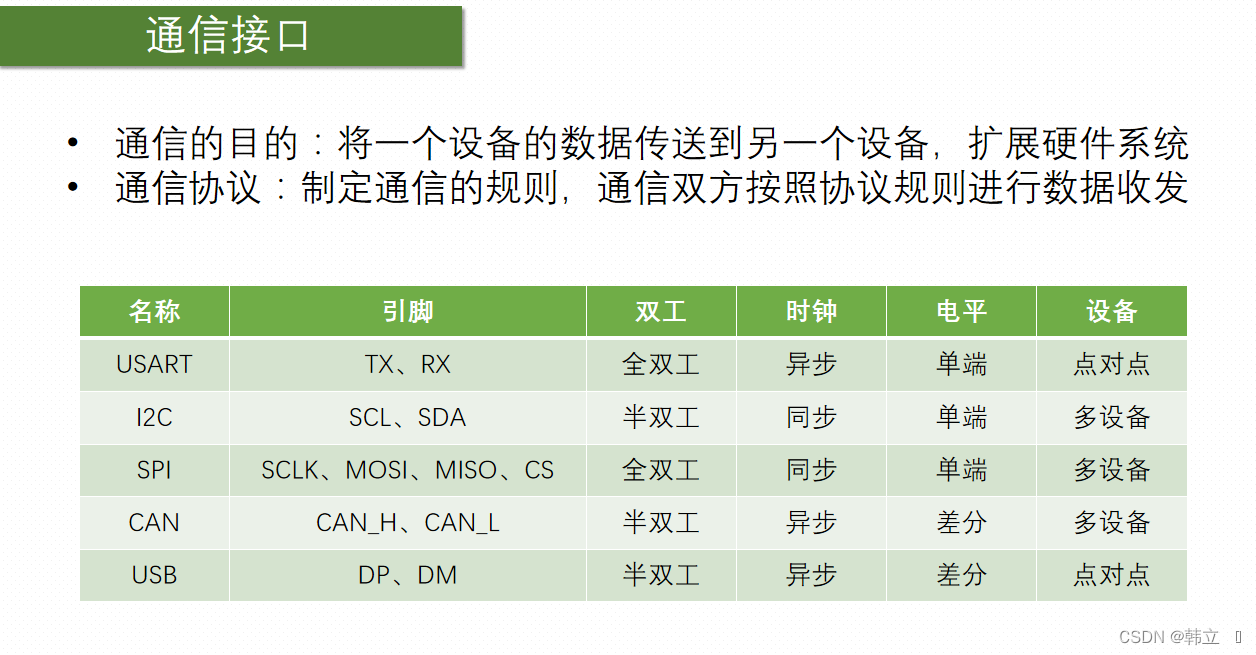
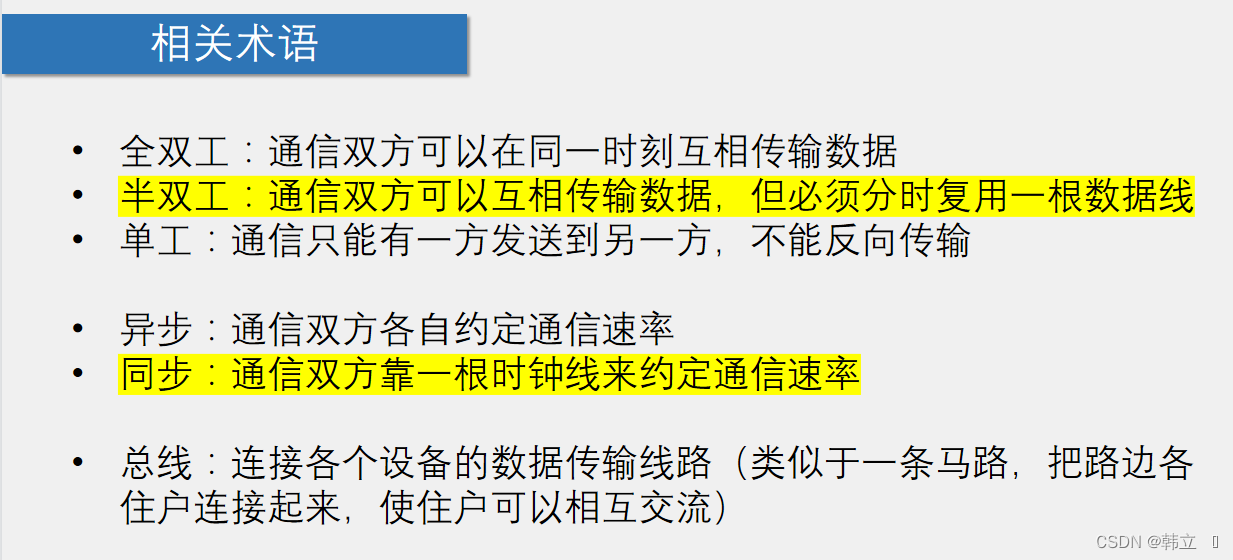
相关术语解释如下:
增强了单片机系统的硬件实力。
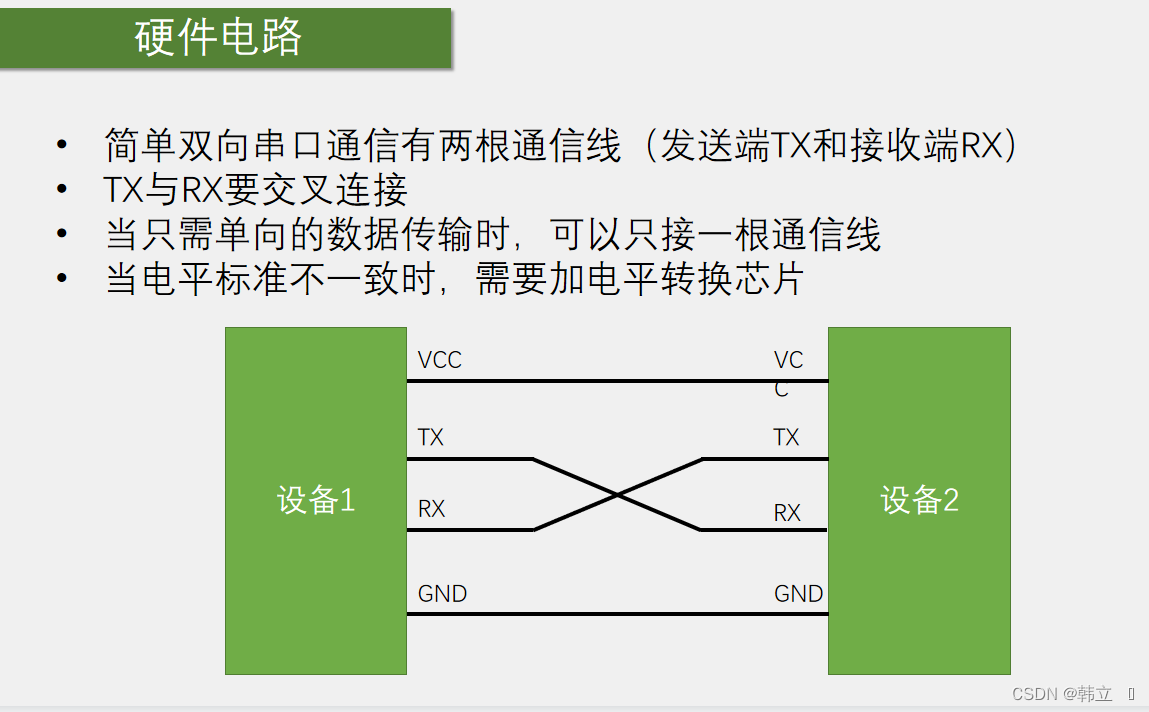
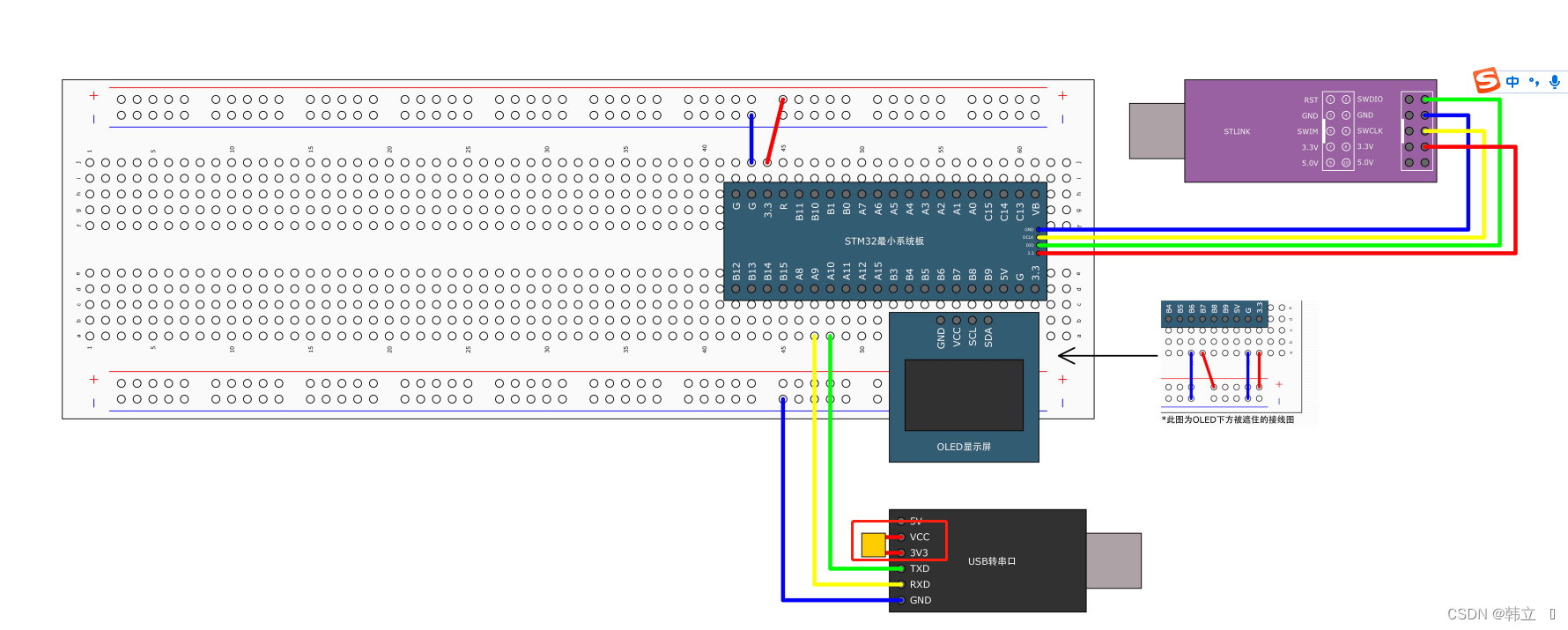
上图的CH340芯片实现USB协议转串口协议,通过该芯片,STM32的串口数据可通过该模块传送到PC端。
四、电平标准
电平标准是数据1和数据0的表达方式,是传输线缆中人为规定的电压与数据的对应关系,串口常用的电平标准有如下三种:
TTL电平:+3.3V或+5V表示1,0V表示0
RS232电平:-3 ~ -15V表示1,+3 ~ +15V表示0
RS485电平:两线压差+2 ~ +6V表示1,-2 ~ -6V表示0(差分信号)
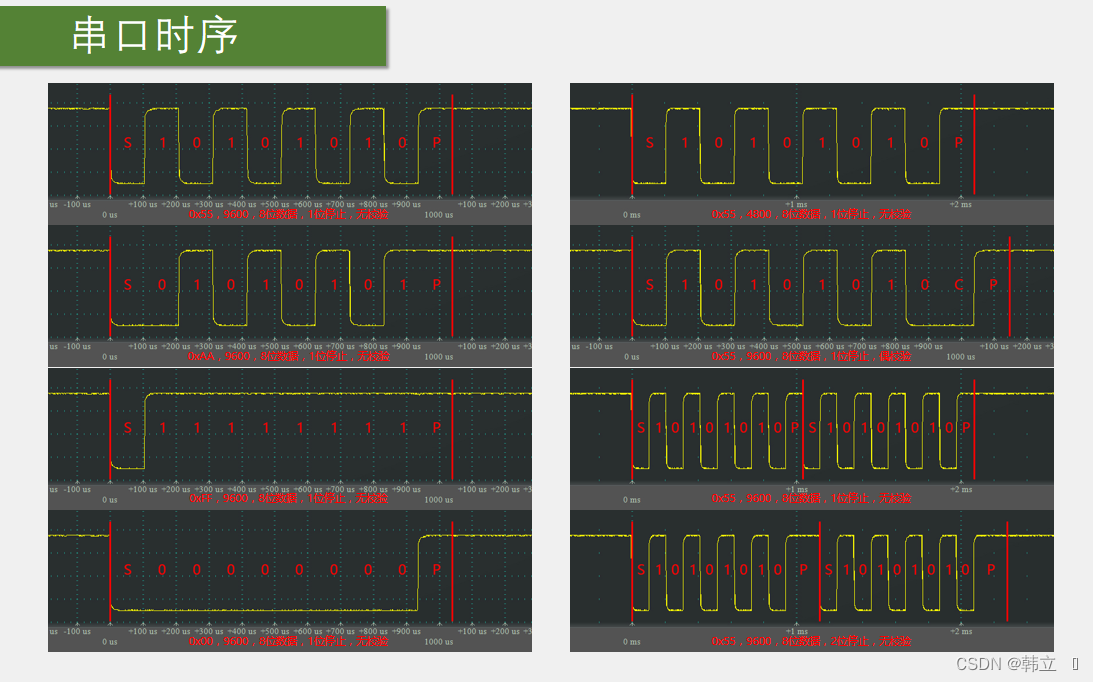
串口发送数据的数据帧
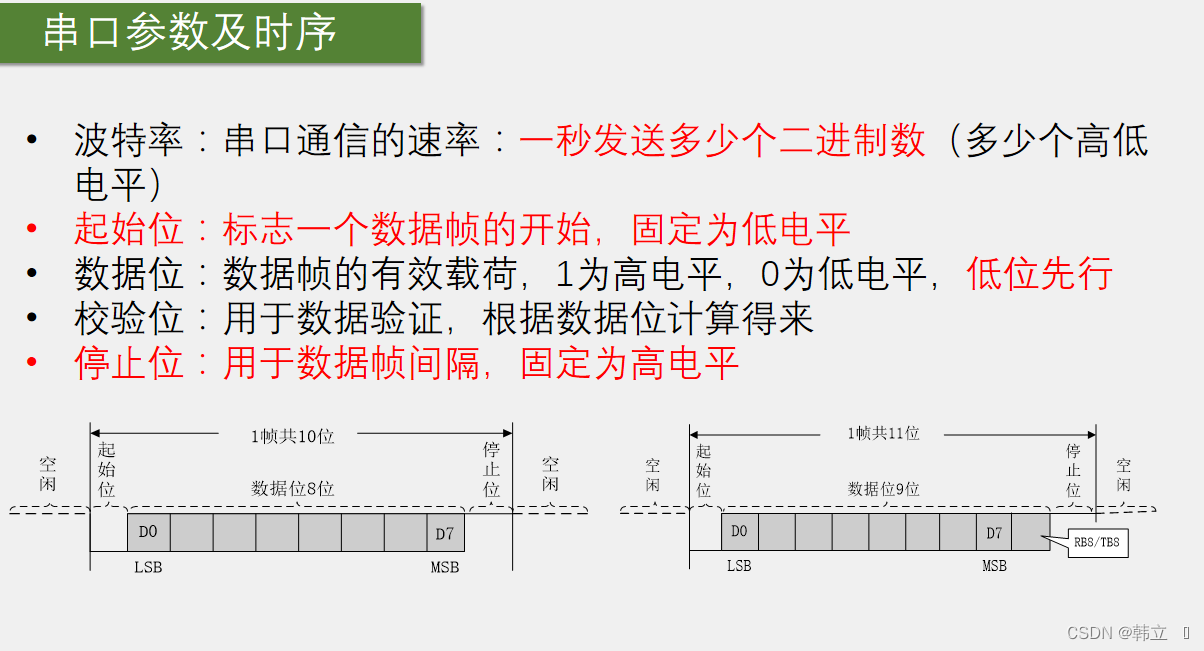
波特率:串口通信的速率(波特率1000,表示1秒需要发送1000位数据)
每秒传输码元个数,单位:码元(位)/秒,bps
起始位:标志一个数据帧的开始,固定为低电平
数据位:数据帧的有效载荷,1为高电平,0为低电平,低位先行(stm32的USART外设会自动翻转电平)
校验位:用于数据验证,根据数据位中1的个数计算得来(无、奇、偶校验)【CRC校验更好】
停止位:用于数据帧间隔,固定为高电平
六、STM32的USART外设简介
USART(Universal Synchronous/Asynchronous Receiver/Transmitter)通用同步/异步收发器
USART是STM32内部集成的硬件外设,可根据数据寄存器的一个字节数据自动生成数据帧时序,从TX引脚发送出去,也可自动接收RX引脚的数据帧时序,拼接为一个字节数据,存放在数据寄存器里
自带波特率发生器,最高达4.5Mbits/s【其实就是分频器,比如APB2总线是72MHZ频率,分频之后得到波特率时钟,在此频率下收发信号】
可配置数据位长度(8/9)、停止位长度(0.5/1/1.5/2)
可选校验位(无校验/奇校验/偶校验)
支持同步模式(多了时钟CLK输出)、硬件流控制(接收方在控制线上置高电平表示还未准备接收数据)、DMA、智能卡、IrDA、LIN
STM32F103C8T6 USART资源: USART1(APB2总线)、 USART2、 USART3
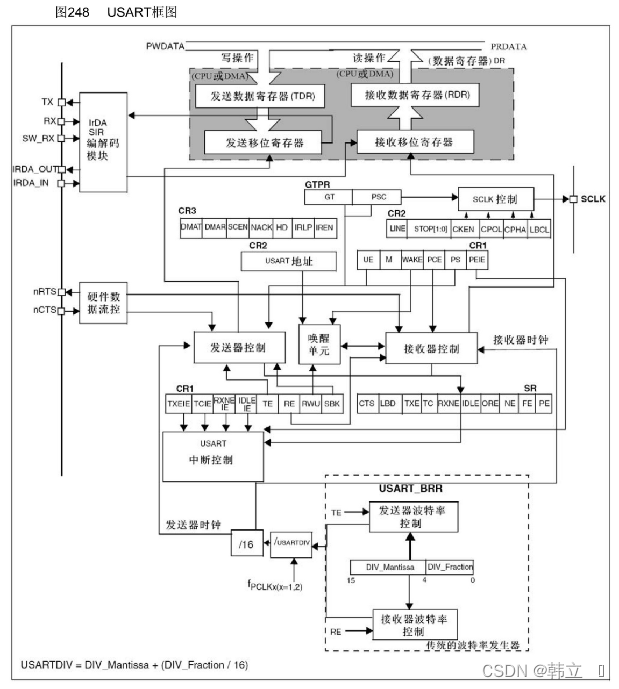
发送数据寄存器(TDR)-----》发送移位寄存器——》TX
RX——》接收移位寄存器——》接受数据寄存器(RDR)
当发送数据寄存器(TDR)将一个字节的数据发送到移位寄存器时,此时TXE标志位会置1,表示TDR可以写入新的数据,然后移位寄存器在发送控制器的做用下一位一位的发送到TX引脚,当移位寄存器为空的时候发送数据寄存器就会将一个字节的数据写入到移位寄存器。
RX将数据发送到接收移位寄存器,在接收控制器的作用下,将数据从移位寄存器发送到接受数据寄存器(RDR),此时RXNE置1
采用两个寄存器进行缓存,可以提高工作效率
发送数据寄存器和接受数据寄存器占用同一个地址,即软件上只有一个寄存器的存在,硬件上是两个寄存器
增强功能介绍
硬件数据流控:避免数据接收发送太快而导致丢失数据
需要接外部支持流控的串口,(例如内部的nRTS与外部的nCTS交叉连接进行通信,可以接收则发送低电平)
nRTS(request,n低电平有效)
nCTS(clear)
SCLK
配合发送移位寄存器工作,每发送一位,时钟就走一个周期,只支持输出,作用是兼容别的协议,例如SPI
唤醒单元
实现串口挂载多设备,在一条总线上接多个设备,每个设备都有一个地址,要通信先寻址
中断控制
右边是状态寄存器SR,其中TXE表示发送寄存器为空,RXNE表示接收寄存器为空
左边是控制寄存器CR
USART_BRR波特率发生器
发送器时钟与接收器时钟
USART1是72MHZ,USART2/3是36MHZ

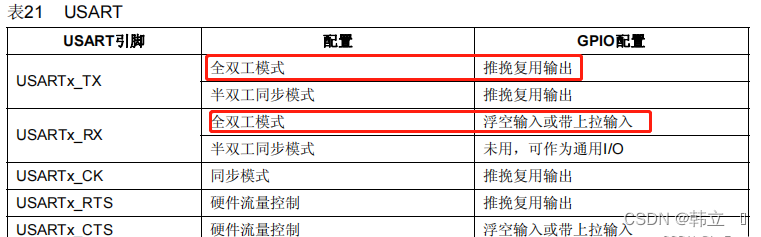
- 接收到数据会置标示位为1,同时可以申请中断,需要配置中断ITConfig和NVIC
- 输入采用浮空输入或上拉输入,串口空闲时是高电平,不能使用下拉输入
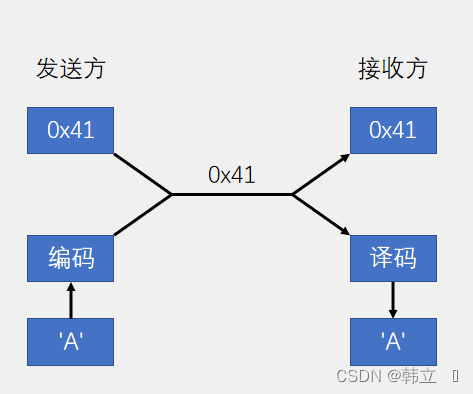
HEX模式/十六进制模式/二进制模式:以原始数据的形式显示
文本模式/字符模式:以原始数据编码后的形式显示
ASCLL编码表
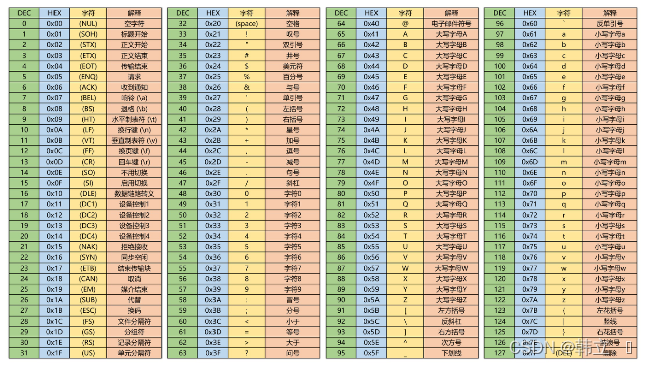
发送方与接收方的数据传输过程,发送方也可以发送字符A,会通过ASCLL编码表转化为十六进制发送给接收方
串口发送数据到PC端代码:
serial.c
#include "stm32f10x.h" // Device header
#include <stdio.h>
#include <stdarg.h>
void Serial_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
//串口模块初始化
USART_InitTypeDef USART_InitStructure;
USART_InitStructure.USART_BaudRate = 9600; //波特率
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //硬件流控,控制数据收发速度的
USART_InitStructure.USART_Mode = USART_Mode_Tx;
USART_InitStructure.USART_Parity = USART_Parity_No; //奇偶校验模式
USART_InitStructure.USART_StopBits = USART_StopBits_1; //指定传输的停止位的比特数
USART_InitStructure.USART_WordLength = USART_WordLength_8b; //指定数据帧位数
USART_Init(USART1, &USART_InitStructure);
USART_Cmd(USART1, ENABLE);
}
void Serial_SendByte(uint8_t Byte)
{
USART_SendData(USART1, Byte);
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
}
void Serial_SendArray(uint8_t *Array, uint16_t Length)
{
uint16_t i;
for (i = 0; i < Length; i ++)
{
Serial_SendByte(Array[i]);
}
}
void Serial_SendString(char *String)
{
uint8_t i;
for (i = 0; String[i] != '\0'; i ++)
{
Serial_SendByte(String[i]);
}
}
uint32_t Serial_Pow(uint32_t X, uint32_t Y)
{
uint32_t Result = 1;
while (Y --)
{
Result *= X;
}
return Result;
}
void Serial_SendNumber(uint32_t Number, uint8_t Length)
{
uint8_t i;
for (i = 0; i < Length; i ++)
{
Serial_SendByte(Number / Serial_Pow(10, Length - i - 1) % 10 + '0');
}
}
int fputc(int ch, FILE *f)
{
Serial_SendByte(ch);
return ch;
}
void Serial_Printf(char *format, ...)
{
char String[100];
va_list arg;
va_start(arg, format);
vsprintf(String, format, arg);
va_end(arg);
Serial_SendString(String);
}
main.c
#include "Serial.h"
int main(void)
{
OLED_Init();
Serial_Init();
Serial_SendByte(0x64);
//uint8_t MyArray[] = {0x42, 0x43, 0x44, 0x45};
//Serial_SendArray(MyArray, 4);
//Serial_SendString("\r\nNum1=");
//Serial_SendNumber(111, 3);
//printf("\r\nNum2=%d", 222);
//char String[100];
//sprintf(String, "\r\nNum3=%d", 333);
//Serial_SendString(String);
//Serial_Printf("\r\nNum4=%d", 444);
//Serial_Printf("\r\n");
while (1)
{
}
}
假设我做了一个模块如下:m=Module.newdoclassCendend三个问题:除了对m的引用之外,还有什么方法可以访问C和m中的其他内容?我可以在创建匿名模块后为其命名吗(就像我输入“module...”一样)?如何在使用完匿名模块后将其删除,使其定义的常量不再存在? 最佳答案 三个答案:是的,使用ObjectSpace.此代码使c引用你的类(class)C不引用m:c=nilObjectSpace.each_object{|obj|c=objif(Class===objandobj.name=~/::C$/)}当然这取决于
作为我的Rails应用程序的一部分,我编写了一个小导入程序,它从我们的LDAP系统中吸取数据并将其塞入一个用户表中。不幸的是,与LDAP相关的代码在遍历我们的32K用户时泄漏了大量内存,我一直无法弄清楚如何解决这个问题。这个问题似乎在某种程度上与LDAP库有关,因为当我删除对LDAP内容的调用时,内存使用情况会很好地稳定下来。此外,不断增加的对象是Net::BER::BerIdentifiedString和Net::BER::BerIdentifiedArray,它们都是LDAP库的一部分。当我运行导入时,内存使用量最终达到超过1GB的峰值。如果问题存在,我需要找到一些方法来更正我的代
我构建了两个需要相互通信和发送文件的Rails应用程序。例如,一个Rails应用程序会发送请求以查看其他应用程序数据库中的表。然后另一个应用程序将呈现该表的json并将其发回。我还希望一个应用程序将存储在其公共(public)目录中的文本文件发送到另一个应用程序的公共(public)目录。我从来没有做过这样的事情,所以我什至不知道从哪里开始。任何帮助,将不胜感激。谢谢! 最佳答案 无论Rails是什么,几乎所有Web应用程序都有您的要求,大多数现代Web应用程序都需要相互通信。但是有一个小小的理解需要你坚持下去,网站不应直接访问彼此
我有一个包含模块的模型。我想在模块中覆盖模型的访问器方法。例如:classBlah这显然行不通。有什么想法可以实现吗? 最佳答案 您的代码看起来是正确的。我们正在毫无困难地使用这个确切的模式。如果我没记错的话,Rails使用#method_missing作为属性setter,因此您的模块将优先,阻止ActiveRecord的setter。如果您正在使用ActiveSupport::Concern(参见thisblogpost),那么您的实例方法需要进入一个特殊的模块:classBlah
我刚刚被困在这个问题上一段时间了。以这个基地为例:moduleTopclassTestendmoduleFooendend稍后,我可以通过这样做在Foo中定义扩展Test的类:moduleTopmoduleFooclassSomeTest但是,如果我尝试通过使用::指定模块来最小化缩进:moduleTop::FooclassFailure这失败了:NameError:uninitializedconstantTop::Foo::Test这是一个错误,还是仅仅是Ruby解析变量名的方式的逻辑结果? 最佳答案 Isthisabug,or
我想获取模块中定义的所有常量的值:moduleLettersA='apple'.freezeB='boy'.freezeendconstants给了我常量的名字:Letters.constants(false)#=>[:A,:B]如何获取它们的值的数组,即["apple","boy"]? 最佳答案 为了做到这一点,请使用mapLetters.constants(false).map&Letters.method(:const_get)这将返回["a","b"]第二种方式:Letters.constants(false).map{|c
我的假设是moduleAmoduleBendend和moduleA::Bend是一样的。我能够从thisblog找到解决方案,thisSOthread和andthisSOthread.为什么以及什么时候应该更喜欢紧凑语法A::B而不是另一个,因为它显然有一个缺点?我有一种直觉,它可能与性能有关,因为在更多命名空间中查找常量需要更多计算。但是我无法通过对普通类进行基准测试来验证这一点。 最佳答案 这两种写作方法经常被混淆。首先要说的是,据我所知,没有可衡量的性能差异。(在下面的书面示例中不断查找)最明显的区别,可能也是最著名的,是你的
我一直致力于让我们的Rails2.3.8应用程序在JRuby下正确运行。一切正常,直到我启用config.threadsafe!以实现JRuby提供的并发性。这导致lib/中的模块和类不再自动加载。使用config.threadsafe!启用:$rubyscript/runner-eproduction'pSim::Sim200Provisioner'/Users/amchale/.rvm/gems/jruby-1.5.1@web-services/gems/activesupport-2.3.8/lib/active_support/dependencies.rb:105:in`co
文章目录1.开发板选择*用到的资源2.串口通信(个人理解)3.代码分析(注释比较详细)1.主函数2.串口1配置3.串口2配置以及中断函数4.注意问题5.源码链接1.开发板选择我用的是STM32F103RCT6的板子,不过代码大概在F103系列的板子上都可以运行,我试过在野火103的霸道板上也可以,主要看一下串口对应的引脚一不一样就行了,不一样的就更改一下。*用到的资源keil5软件这里用到了两个串口资源,采集数据一个,串口通信一个,板子对应引脚如下:串口1,TX:PA9,RX:PA10串口2,TX:PA2,RX:PA32.串口通信(个人理解)我就从串口采集传感器数据这个过程说一下我自己的理解,
目录前言滤波电路科普主要分类实际情况单位的概念常用评价参数函数型滤波器简单分析滤波电路构成低通滤波器RC低通滤波器RL低通滤波器高通滤波器RC高通滤波器RL高通滤波器部分摘自《LC滤波器设计与制作》,侵权删。前言最近需要学习放大电路和滤波电路,但是由于只在之前做音乐频谱分析仪的时候简单了解过一点点运放,所以也是相当从零开始学习了。滤波电路科普主要分类滤波器:主要是从不同频率的成分中提取出特定频率的信号。有源滤波器:由RC元件与运算放大器组成的滤波器。可滤除某一次或多次谐波,最普通易于采用的无源滤波器结构是将电感与电容串联,可对主要次谐波(3、5、7)构成低阻抗旁路。无源滤波器:无源滤波器,又称