目录
本节我们要学习的的是STM32的通信部分,主要介绍UART(通用异步收发器),是一种异步、全双工的通信方式。
首先,我们先来介绍一下通信的基本知识,之前在51单片机的学习中我们也接触过UART,在此就不做详细介绍,感兴趣的同学请看51单片机基础——串口通信 。
这是一些常见的串行通信接口,熟悉51单片机的同学应该都接触过,在此不做详细介绍,感兴趣可以去我的51单片机笔记一一了解。我们需要知道的是同步就需要时钟,半双工一般是需要一个输入输出端口,而全双工一般有两个。

与51不同的是,STM32F407支持6个UART。但其他都是基本一样的,所以理解起来还是比较简单的。
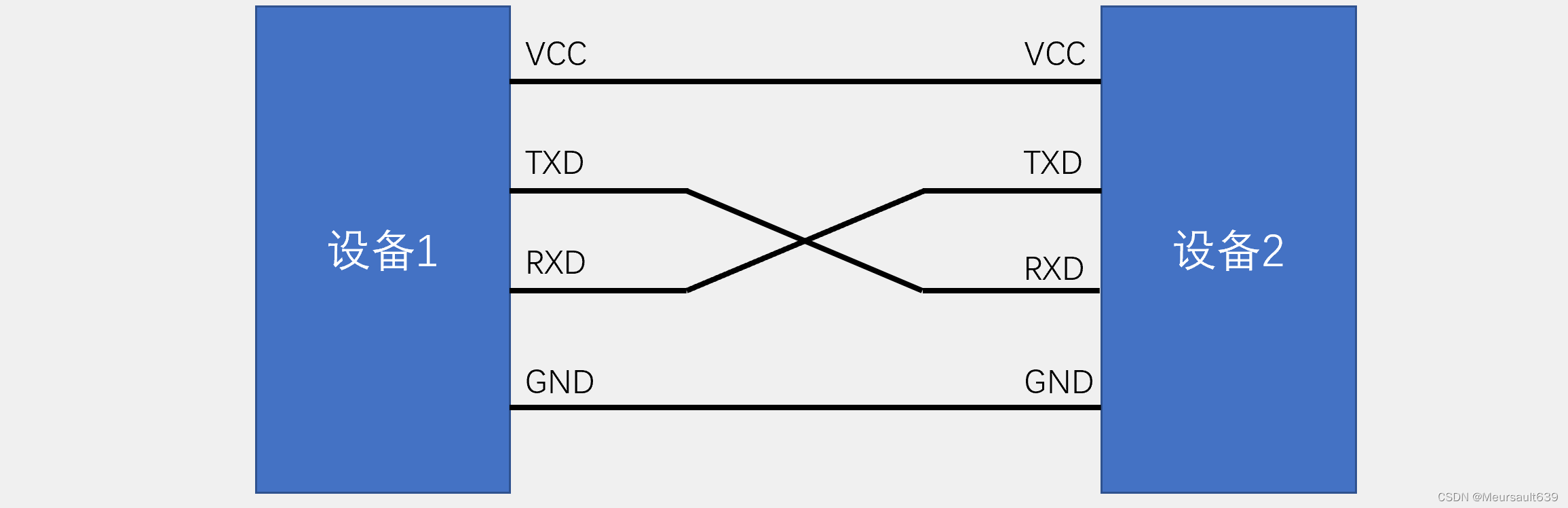
- 简单双向串口通信有两根通信线(发送端TXD和接收端RXD)
- TXD与RXD要交叉连接
- 当只需单向的数据传输时,可以直接一根通信线
- 当电平标准不一致时,需要加电平转换芯片
- 支持小数波特率发生器系统,提供精确的波特率。(通信双方事先约定好一种速度即波特率)
- 可配置的16倍过采样或8倍过采样,为速度容差与时钟容差的灵活配置提供了可能。
- 可配置的停止位(支持1或者2位停止位)
- 可编程的数据字长度(8位或者9位)
- 可配置的使用DMA多缓冲器通信
- 单独的发送器和接收器使能位
- 检测标志:
- 接收缓冲器;
- 发送缓冲器空;
- 传输结束标志;
- 多个带标志的中断源,触发中断(串行通信可以发送接收数据,接收到一个数据可以触发一个中断)
- 其他:校验控制、四个错误检测标志
我们在使用通信之前,需要设置好串口通信所需的参数,如下所示。
- 起始位
- 数据位(8位或9位)
- 奇偶校验位(第9位)
- 停止位(1、15、2位)
- 波特率设置

红色代表发送,蓝色代表接收,其实核心部分就是下面的设置波特率 ,而这一部分,我们会在后面的代码中呈现出来,在此不做介绍。

SR寄存器叫做状态寄存器(Status register),具体每个位对应是什么就不一一介绍,手册上都有详细的介绍。到时候再到代码进行介绍。
DR寄存器叫做数据寄存器(Data register),主要用来接收和发送数据。
BRR寄存器叫波特率寄存器(Baud rate register),用来配置波特率。

- 串口时钟使能,GPIO 时钟使能。
- 设置引脚复用器映射:调用 GPIO_PinAFConfig 函数。
- GPIO 初始化设置:要设置模式为复用功能。
- 串口参数初始化:设置波特率,字长,奇偶校验等参数。
- 开启中断并且初始化 NVIC,使能中断(如果需要开启中断才需要这个步骤)。
- 使能串口。
- 编写中断处理函数:函数名格式为 USARTxIRQHandler(x 对应串口号)。
这一段代码,就是简单的一个串口通信,我们使用单片机与电脑通信,将数据发送给单片机,再由单片机发送给电脑。
#include "stm32f4xx.h"
#include "usart.h"
#include "delay.h"
void My_USART1_Init(void)
{
// 串口1是接在APB2上的
GPIO_InitTypeDef GPIO_InitStructure;// GPIO
USART_InitTypeDef USART_InitStructure;// 串口
NVIC_InitTypeDef NVIC_InitStructure;// 中断
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);// 使能串口1
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE);// 使能GPIO
GPIO_PinAFConfig(GPIOA,GPIO_PinSource9,GPIO_AF_USART1);// PA9,PA10初始化
GPIO_PinAFConfig(GPIOA,GPIO_PinSource10,GPIO_AF_USART1);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9 | GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
// 设置串口
USART_InitStructure.USART_BaudRate = 115200;// 波特率
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; // 硬件流控
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;// 发送接收
USART_InitStructure.USART_Parity = USART_Parity_No;// 奇偶校验
USART_InitStructure.USART_StopBits = USART_StopBits_1;// 停止位
USART_InitStructure.USART_WordLength = USART_WordLength_8b;// 发送位数
USART_Init(USART1, &USART_InitStructure);
USART_Cmd(USART1,ENABLE);
USART_ITConfig(USART1,USART_IT_RXNE,ENABLE);
// 设置中断
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;// 响应优先级
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;// 抢占优先级
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_Init( &NVIC_InitStructure);
}
// 中断函数
void USART1_IRQHandler(void)
{
u8 res;
if(USART_GetITStatus(USART1,USART_IT_RXNE)){
res = USART_ReceiveData(USART1);
USART_SendData(USART1,res);
}
}
int main(void)
{
// 中断分组
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
My_USART1_Init();
while(1);
}32串口通信
上面的代码是一个简单的例子,接下来我们看一个复杂一点的例子,只给出主函数,其他头文件有需要的可以找我或者去正点原子官方进行下载。
#include "sys.h"
#include "delay.h"
#include "usart.h"
#include "led.h"
#include "beep.h"
#include "key.h"
int main(void)
{
u8 t,key,len;
u16 times=0;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);// 设置中断优先级分组2
delay_init(168); //延时函数初始化
uart_init(115200); //波特率115200
LED_Init(); //初始化LED
KEY_Init();// 按键初始化
printf("您好,请问有什么能帮助到你的吗?\r\n");
while(1)
{
key = KEY_Scan(0);
if(USART_RX_STA&0x8000)// 判断接收完成位
{
len=USART_RX_STA&0x3fff;// 数据长度
printf("\r\n您发送的问题我们已经收到:\r\n");
for(t=0;t<len;t++)
{
USART_SendData(USART1, USART_RX_BUF[t]); // 向串口1发送数据
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)!=SET);// 等待发送结束
}
printf("\r\n\r\n");//换行
USART_RX_STA=0;
}else
{
times++;
if(times%30==0)LED0=!LED0;//LED闪烁,提示正常
delay_ms(10);
}
if(key == 1){
printf("\r\n您好,我是人工客服小陈,很高兴为您服务!\r\n");
}
}
}32串口通信1
在此过程中,遇到了一些问题,比如代码补全功能调不出来,还有XCOM的乱码问题,代码补全的问题,用MDK的exe替换就好了,因为可能是之前安装的是51的安装包。关于乱码的问题,我单独写一篇文章,希望能帮助遇到相同问题的同学,关于使用XCOM进行串口通信时乱码的解决方案。
好了,关于串口通信我们先讲这么多,希望能对大家有所帮助,谢谢大家了!
我构建了两个需要相互通信和发送文件的Rails应用程序。例如,一个Rails应用程序会发送请求以查看其他应用程序数据库中的表。然后另一个应用程序将呈现该表的json并将其发回。我还希望一个应用程序将存储在其公共(public)目录中的文本文件发送到另一个应用程序的公共(public)目录。我从来没有做过这样的事情,所以我什至不知道从哪里开始。任何帮助,将不胜感激。谢谢! 最佳答案 无论Rails是什么,几乎所有Web应用程序都有您的要求,大多数现代Web应用程序都需要相互通信。但是有一个小小的理解需要你坚持下去,网站不应直接访问彼此
文章目录1.开发板选择*用到的资源2.串口通信(个人理解)3.代码分析(注释比较详细)1.主函数2.串口1配置3.串口2配置以及中断函数4.注意问题5.源码链接1.开发板选择我用的是STM32F103RCT6的板子,不过代码大概在F103系列的板子上都可以运行,我试过在野火103的霸道板上也可以,主要看一下串口对应的引脚一不一样就行了,不一样的就更改一下。*用到的资源keil5软件这里用到了两个串口资源,采集数据一个,串口通信一个,板子对应引脚如下:串口1,TX:PA9,RX:PA10串口2,TX:PA2,RX:PA32.串口通信(个人理解)我就从串口采集传感器数据这个过程说一下我自己的理解,
MIMO技术的优缺点优点通过下面三个增益来总体概括:阵列增益。阵列增益是指由于接收机通过对接收信号的相干合并而活得的平均SNR的提高。在发射机不知道信道信息的情况下,MIMO系统可以获得的阵列增益与接收天线数成正比复用增益。在采用空间复用方案的MIMO系统中,可以获得复用增益,即信道容量成倍增加。信道容量的增加与min(Nt,Nr)成正比分集增益。在采用空间分集方案的MIMO系统中,可以获得分集增益,即可靠性性能的改善。分集增益用独立衰落支路数来描述,即分集指数。在使用了空时编码的MIMO系统中,由于接收天线或发射天线之间的间距较远,可认为它们各自的大尺度衰落是相互独立的,因此分布式MIMO
LL库和HAL库简介LL:Low-Layer,底层库HAL:HardwareAbstractionLayer,硬件抽象层库LL库和hal库对比,很精简,这实际上是一个精简的库。LL库的配置选择如下:在STM32CUBEMX中,点击菜单的“ProjectManager”–>“AdvancedSettings”,在下面的界面中选择“AdvancedSettings”,然后在每个模块后面选择使用的库总结:1、如果使用的MCU是小容量的,那么STM32CubeLL将是最佳选择;2、如果结合可移植性和优化,使用STM32CubeHAL并使用特定的优化实现替换一些调用,可保持最大的可移植性。另外HAL和L
功能需求:主机使用一个串口,与两个从机进行双向通信,主机向从机发送数据,从机能够返回数据,由于结构限制,主机与从机之间只有3根线(电源、地、数据线),并且从机上没有设物理的电源开关,需要通过与主机连接的数据线来控制开机,总结如下:1、数据线只有1根2、能够双向通信3、主机能够控制从机开机4、主机可以单独向1个从机发数据,也可以同时向两个从机发送数据根据需求,设计出如下电路:工作原理分析:VCC_24V_IN、GND、LINE_L(LINE_R)三根线接线连接到从机,电源开启电路是从机内部的电源控制。开机的逻辑:*主机先上电,LINE_L因为主机的R1上拉而有高电平,使Q6导通,Q5的G极电压被
目录一、ESP32简单介绍二、ESP32Wi-Fi模块介绍三、ESP32Wi-Fi编程模型四、ESP32Wi-Fi事件处理流程 五、ESP32Wi-Fi开发环境六、ESP32Wi-Fi具体代码七、ESP32Wi-Fi代码解读6.1主程序app_main7.2自定义代码wifi_init_sta()八、ESP32Wi-Fi连接验证8.1测试方法8.2服务器模拟工具sscom58.3测试代码8.4测试结果前言为了开发一款亚马逊物联网产品,开始入手ESP32模块。为了能够记录自己的学习过程,特记录如下操作过程。一、ESP32简单介绍ESP32是一套Wi-Fi(2.4GHz)和蓝牙(4.2)双模解决方
有道无术,术尚可求,有术无道,止于术。本系列SpringBoot版本3.0.4本系列SpringSecurity版本6.0.2本系列SpringAuthorizationServer版本1.0.2源码地址:https://gitee.com/pearl-organization/study-spring-security-demo文章目录前言1.OAuth2AuthorizationServerMetadataEndpointFilter2.OAuth2AuthorizationEndpointFilter3.OidcProviderConfigurationEndpointFilter4.N
在我的代码中,我需要使用各种算法(包括CRC32)对文件进行哈希处理。因为我还在Digest系列中使用其他加密哈希函数,所以我认为为它们维护一个一致的接口(interface)会很好。为了记录,我确实找到了digest-crc,一颗完全符合我要求的gem。问题是,Zlib是标准库的一部分,并且有一个我想重用的CRC32工作实现。此外,它是用C编写的,因此它应该提供与digest-crc相关的卓越性能,后者是纯ruby实现。实现Digest::CRC32一开始看起来非常简单:%w(digestzlib).each{|f|requiref}classDigest::CRC32一切正常:
我正在尝试在我的机器上安装win32-apigem,但在构建native扩展时我遇到了一些问题:$geminstallwin32-api--no-ri--rdocTemporarilyenhancingPATHtoincludeDevKit...Buildingnativeextensions.Thiscouldtakeawhile...C:\Programs\dev_kit\bin\make.exe:***Couldn'treservespaceforcygwin'sheap,Win32error0ERROR:Errorinstallingwin32-api:ERROR:Failed
我在Windows上运行ruby1.9.2并试图移植在Ruby1.8中工作的代码。该代码使用以前运行良好的Open4.popen4。对于1.9.2,我做了以下事情:通过geminstallPOpen4安装了POpen4需要POpen4通过require'popen4'尝试像这样使用POpen4:Open4.popen4("cmd"){|io_in,io_out,io_er|...}当我这样做时,我得到了错误:nosuchfiletoload--win32/open3如果我尝试安装win32-open3(geminstallwin32-open3),我会收到错误消息:win32-op