1.内点法是在可行域内部进行搜索,最后收敛到最优解边界
2.常用的内点法有仿射尺度法、对数障碍法和原始对偶法
线性规划(LP)问题除了用单纯形法和对偶理论来求解,还有一种搜索的解法——内点法(interior point method),它是在可行域内部移动。今天我们来学习三种内点法,包括:仿射尺度法(affine-scaling),对数障碍法(log-barrier)和原始对偶法(primal-dual).
同样的,为了便于介绍,我们引进一个新例子——弗兰妮的木柴:
每年弗兰妮从她的小树林里卖出3根火柴。一个潜在顾客愿意支付每半根90美元,另一位愿意支付每根150美元。我们的问题是弗兰妮应该卖给每位顾客多少木柴以最大化自己的收益?假设每位顾客可以尽可能多地购买。
对上述情景建立模型,很容易得到:
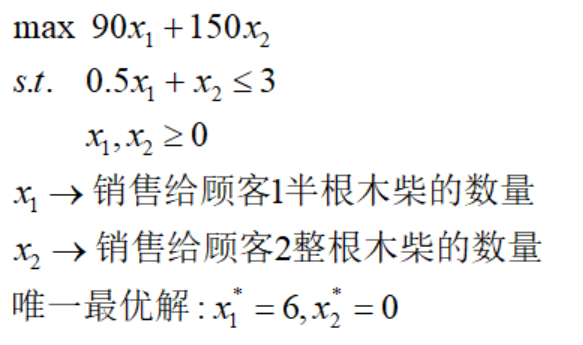
在二维坐标轴画出它的可行域区域。
0
内点法的逻辑
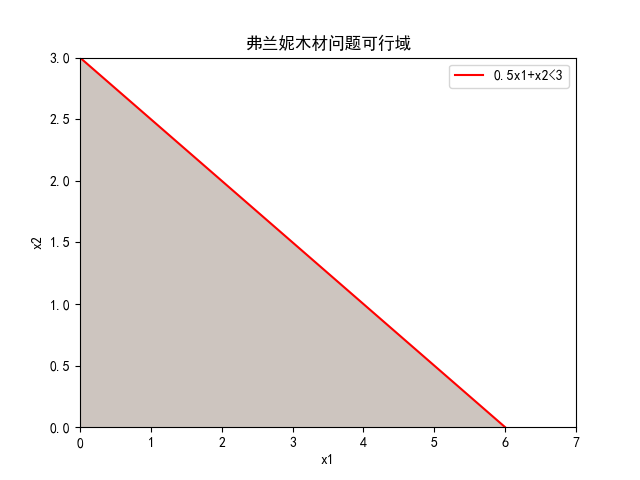
内点法是在可行域内部进行搜索迭代的算法,它有一个显著的优点:没有约束起作用,所有方向都是可行的。但我们知道最大化模型的最大改进方向是梯度方向,最小化模型的最大改进方向是负梯度方向。这样子内点法就不可避免的会在边界点停下。假设弗兰妮木材问题,从内点X0(1,0.5)往梯度方向改进,根据最大步长原理,下一个点会停留在可行域边界上X1:
因此,内点法的关键在于,搜索点是否一直保持在可行域的“中部”指导最优解被找到,其要遵循:内点法从一个内部可行点开始,并且在一系列内部点之间进行搜索,直到最优解处收敛到可行域的边界。
要检查每次迭代点是否为内点,我们先要将LP问题变为标准型的线性规划,已弗兰妮木柴问题为例:
这样就很容易判断一个可行解是否为内点:给定线性规划标准型的可行解,若可行解每一个分量都严格为正,则该可行解是一个内点
下面举个例子加以说明:
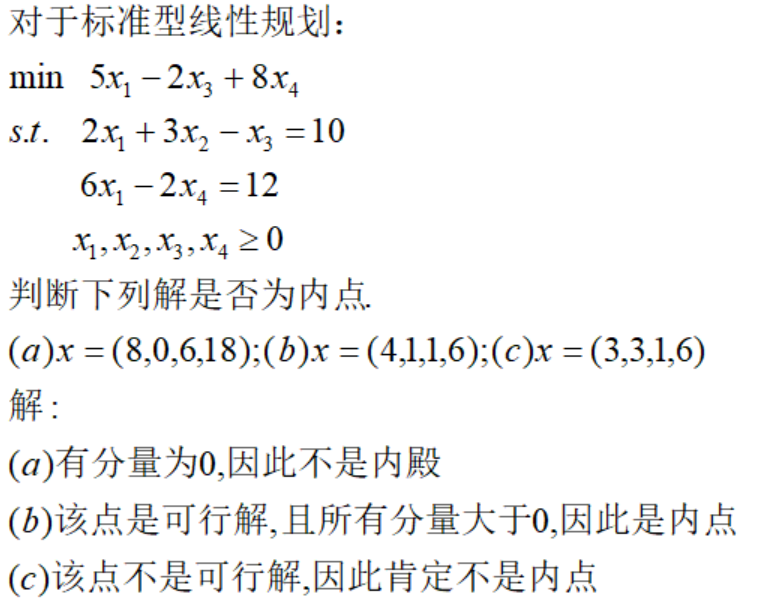
可以看到,对于标准型LP问题,内点必须满足:约束条件Ax=b成立;分量严格大于0。它的下一个搜索点的方向要满足:
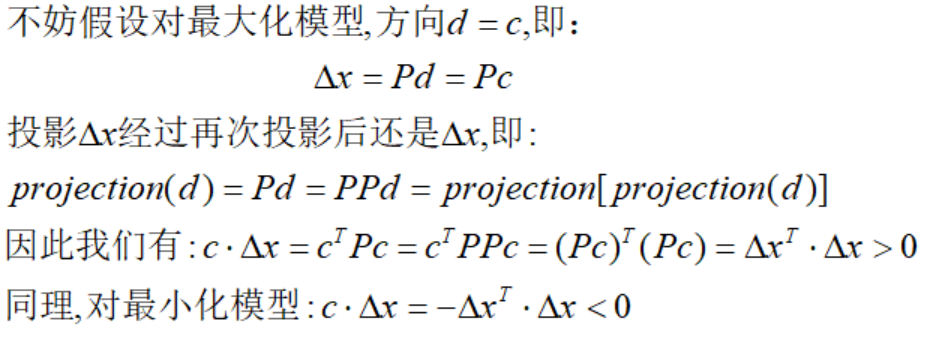
根据投影理论,我们可以得到内点的移动方向:

通常来说,取d是正负梯度方向,因为该方向是改进最快的方向,Δx保证了可行方向。上面的理论表明移动方向尽可能靠近改进方向且保持在内点上。那么Δx是否为改进方向呢,答案是肯定的,我们可以证明:
举个例子:
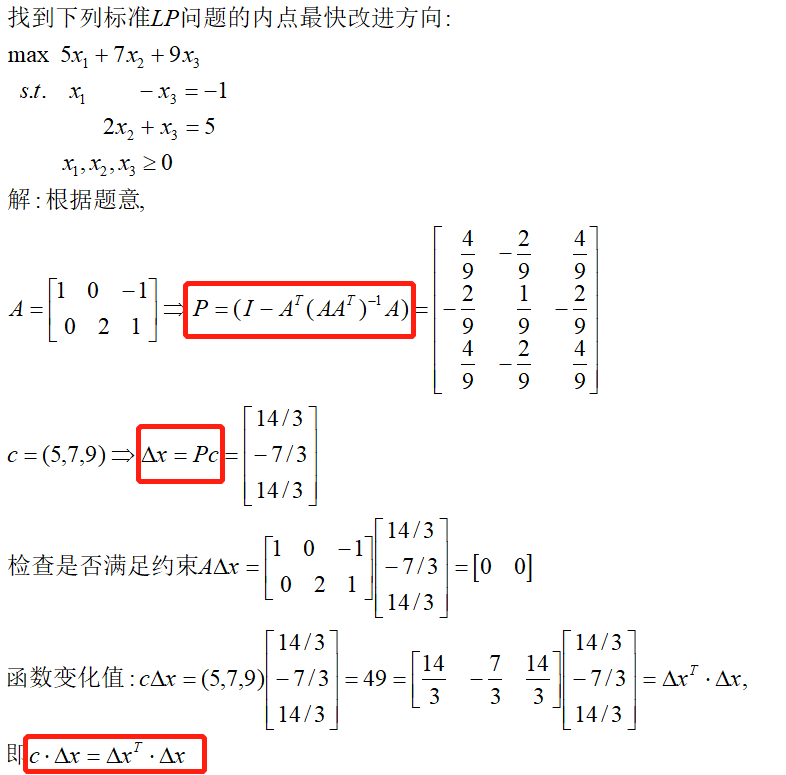
总结一下,内点法的核心是找到最优解以前避开可行域的边界,并保证每一轮迭代都是可行改进方向。
1
仿射尺度算法
根据上一节的原理,我们提出一种避开边界的有效工具——尺度变换(scaling),首先定义当前解的对角方阵形式:
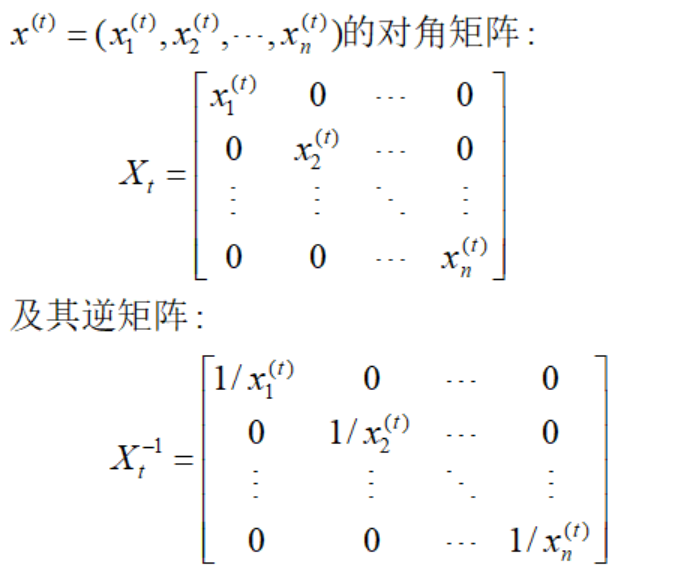
因为内点的分量严格大于0,由此我们构建仿射尺度变换(affine scaling)和逆仿射尺度变换:
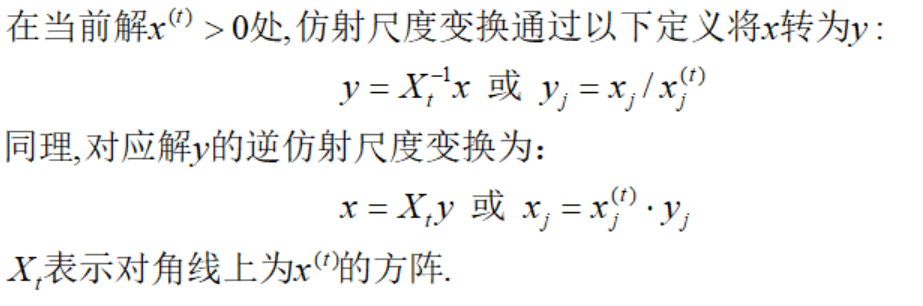
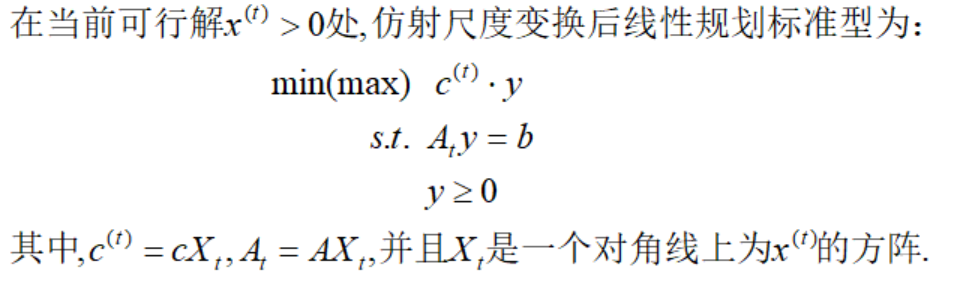
经过变换,会改变原本标准型线性规划的形式:
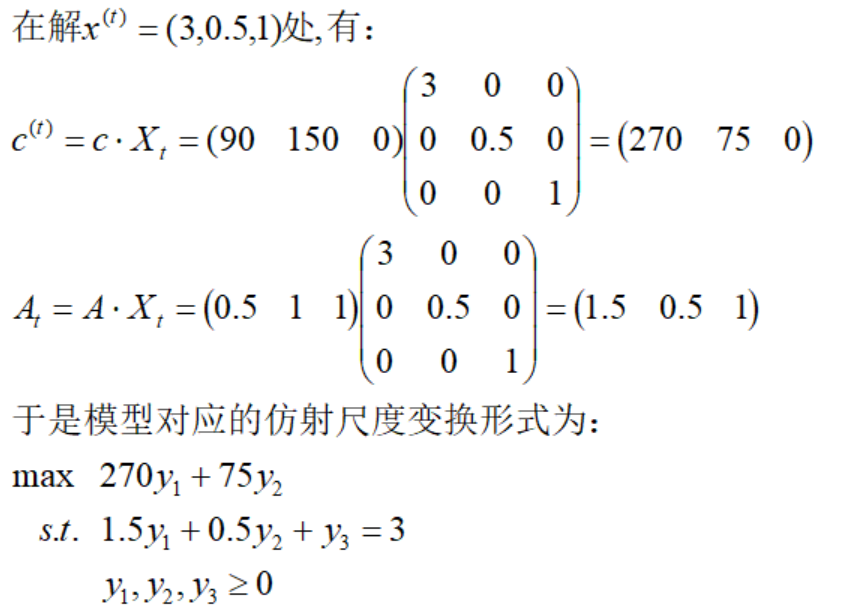
以弗兰妮木柴问题为例,c=(90,150,0),A=(0.5,1,1),b=(3),则:
仿射尺度变换后的形式,要得到下一个搜索点,根据投影理论,我们得到:
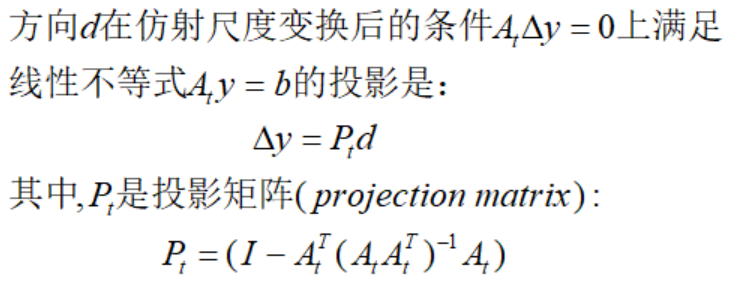
利用逆仿射尺度变换可以得到原目标函数的可行改进方向Δx:

接下来就剩下最后一个问题,移动的步长是多少:

很显然,我们要严格保证每一步得到的解每个分量都严格大于0,直至收敛到最优解。对于最大化问题,如果Δx非负,则对应的标准型线性规划模型无界。否则:
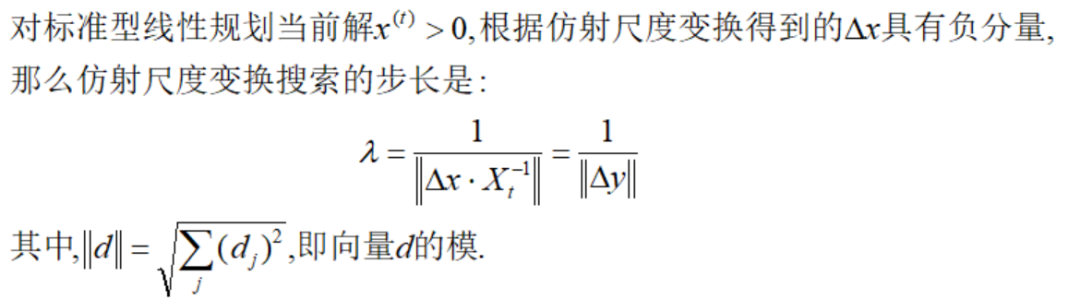
为什么是这样呢,因为经过仿射尺度变换后的y,均为1:

说明搜索范围在一个单位圆(维度n)内进行,只需要通过找出这种球形的极限来实现仿射尺度变换。
综上,我们得到仿射尺度算法的步骤:
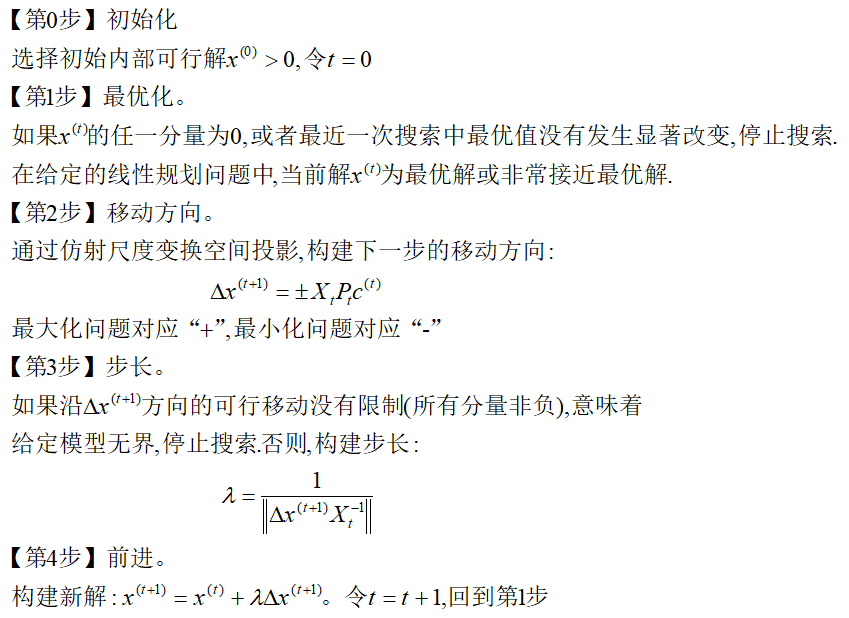
以弗兰妮木柴问题为例,我们来看看仿射尺度变换算法的细节:
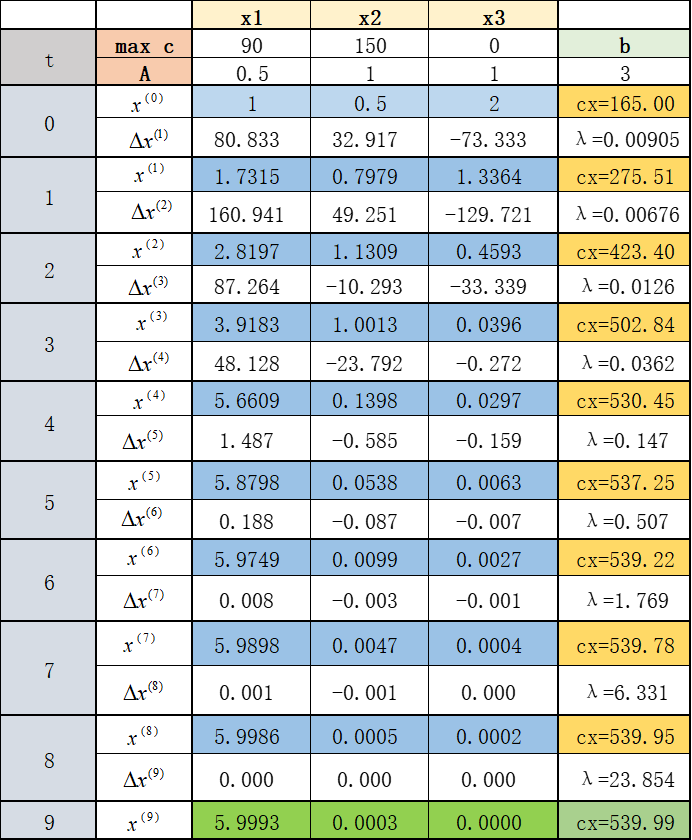
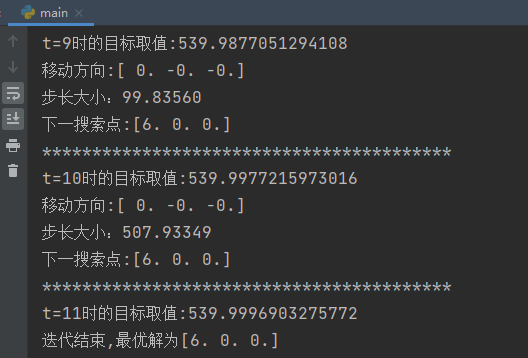
可以看到,迭代到第九次的时候,误差已经很接近最优解了。我们利用python程序可以轻松实现这个过程:
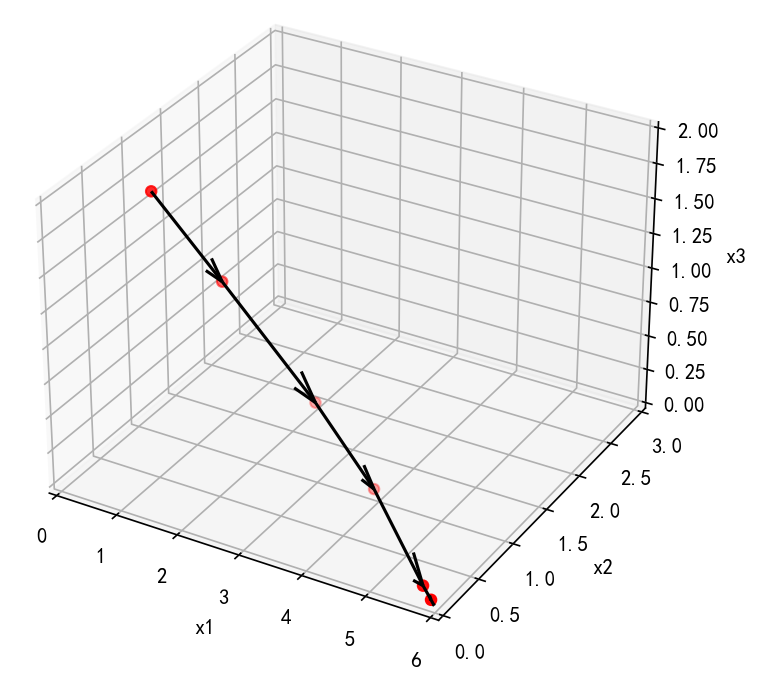
下面3D图展示了搜索过程(只展示前6次迭代):
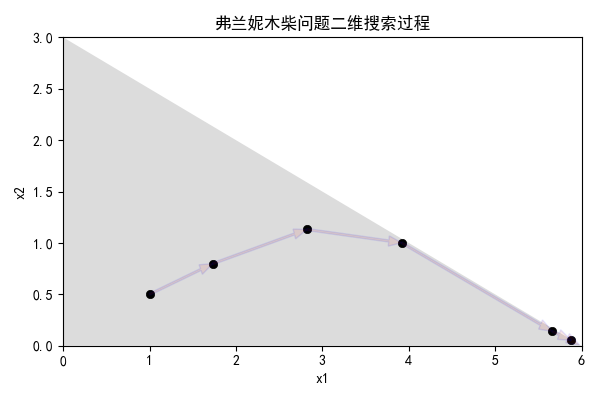
二维图更加精确的展示了搜索过程均在可行域的内点进行:
注:代码放到附录
2
对数障碍法
下面我们介绍第二种内点法——对数障碍法。先直接给出模型:
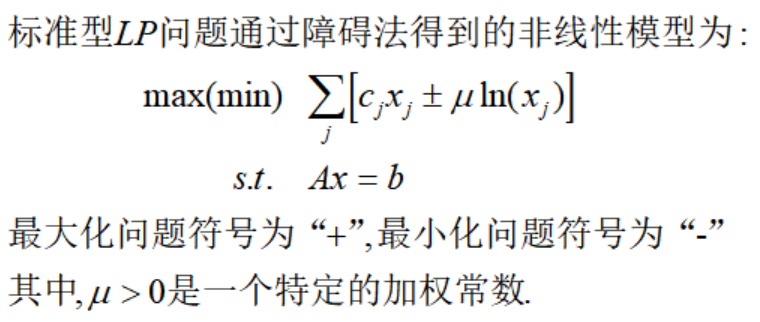
这里的思想也是尽可能使得搜索点原理边界,为什么这样呢,因为:
以弗兰妮木柴问题为例:
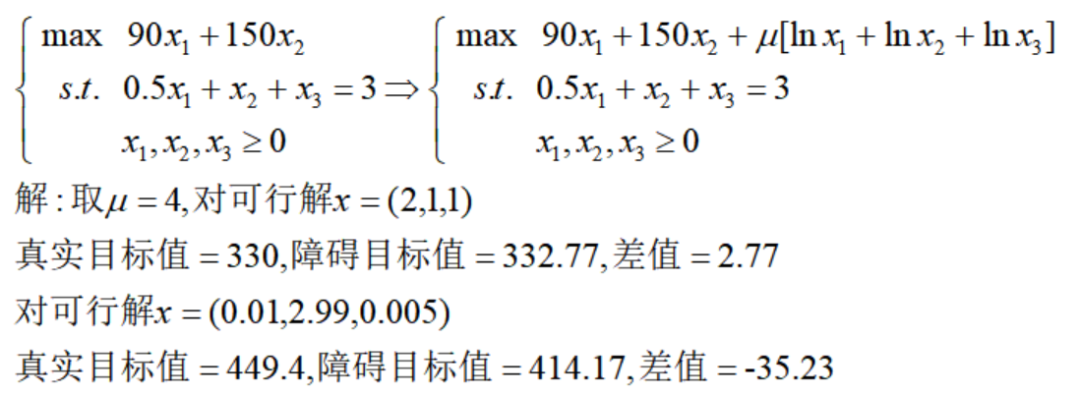
可以看到越接近边界,障碍项对真实值的影响越显著,这样就避免了搜索算法在迭代中触及可行域边界。
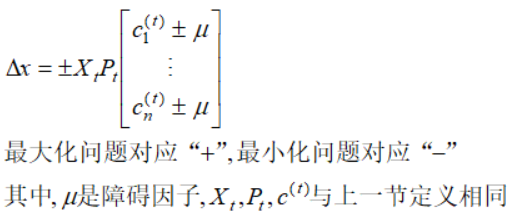
拥有对数障碍项的规划问题是非线性的,我们利用牛顿法的思想,在多元函数上进行二阶泰勒展开进行迭代,推导过程不再展开,这里直接给出移动的方向:
从牛顿迭代的障碍法的步长为:
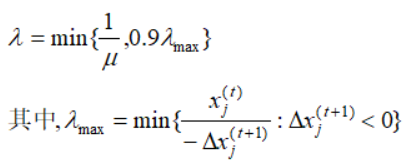
上述公式,倍数定位0.9是因为由于目标的非线性,搜索过程可能接近步长最大值以前就停止改进,或者可能是在当前解附近改进方向在更大步长之后开始降低目标函数值。
接下来剩余最后一个问题——障碍因子的确定。很显然,该因子较大时对接近边界的内点阻碍作用显著,较小时鼓励搜索过程接近边界。因此,障碍算法通常以较大的因子开始,随着搜索过程的进行缓慢将其减小到0
综合以上,我们得到障碍算法的步骤:
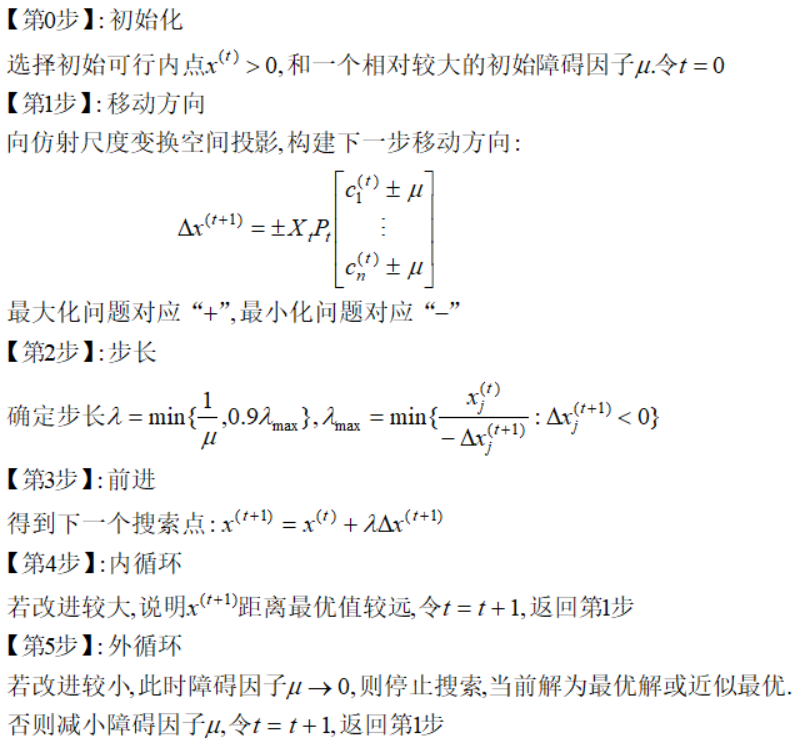
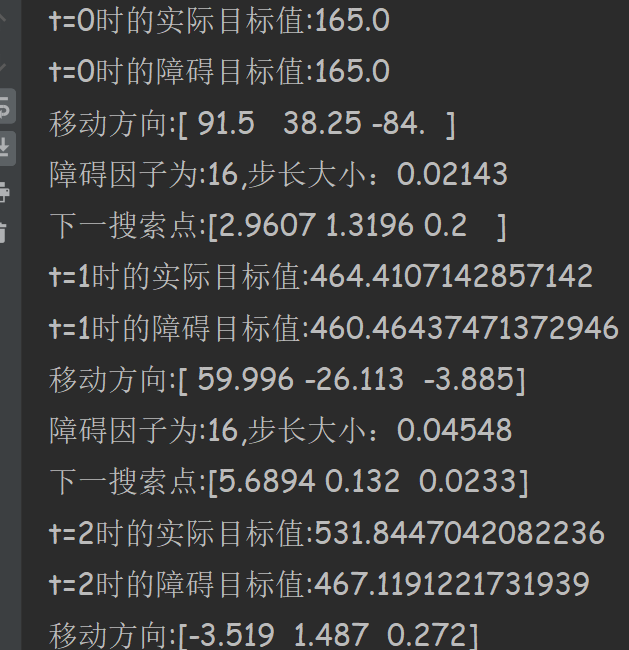
依旧以弗兰妮木柴问题为例,用代码实现这个过程,下图展示了前五次二维搜索过程:
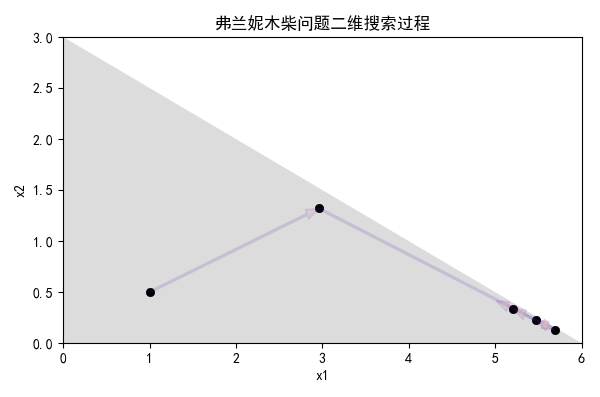
小编开发的代码经历12次迭代达到最优,下面是部分截图,代码见附录。
3
原始对偶法
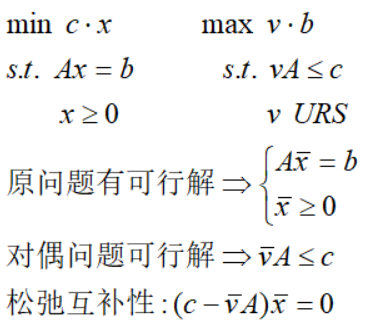
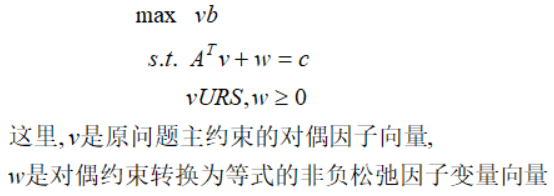
本节我们讨论内点法的最后一种算法——原始对偶内点法。在对偶理论里面,我们得到了标准型原始问题与对偶问题的形式以及松弛条件:
传送门:线性规划的对偶理论
我们将对偶问题加上松弛变量,化成不含不等式约束的形式,得到:
在最优解处,我们有:
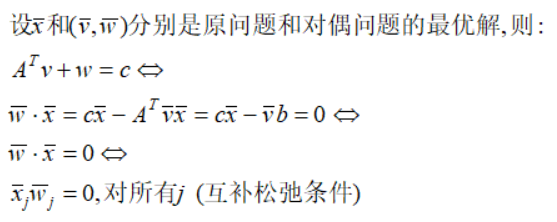
如果解不是在最优处,上面的等式不满足,而原始对偶内点法(primal-dual interior-point search)利用它们的对偶间隙(duality gap)进行迭代:

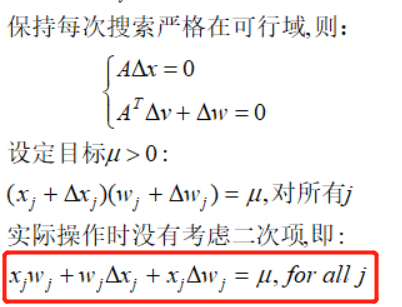
迭代原理是:原始对偶内点法始终保持原始问题和对偶问题的解在每次迭代中严格可行,并在搜索过程中系统性减小互补松弛性的违背程度
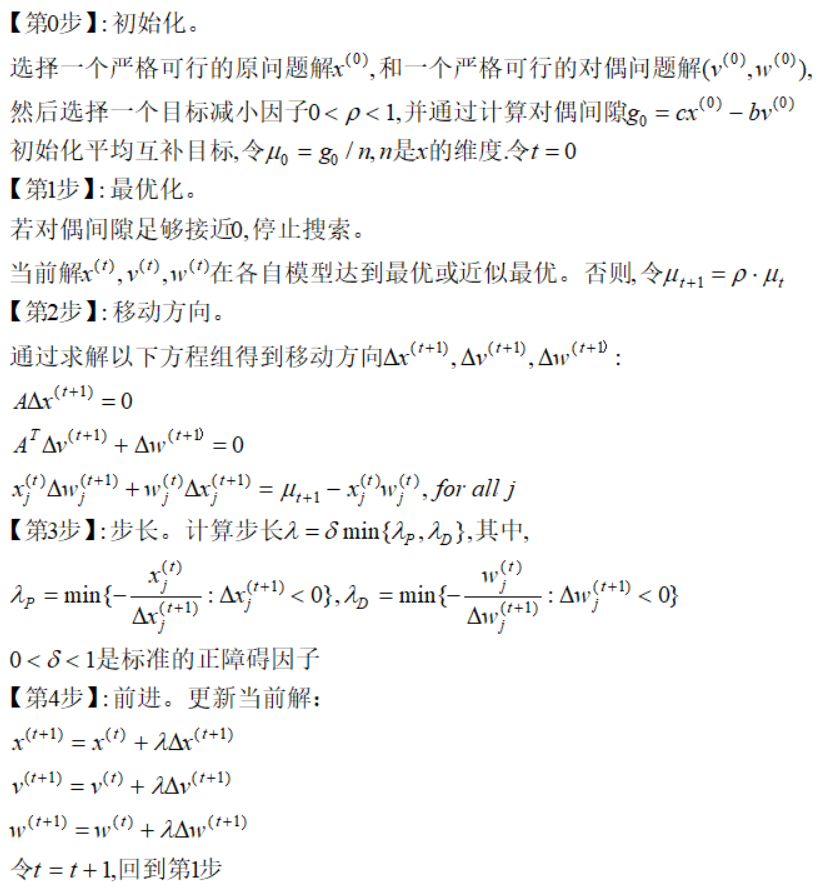
具体的,原始对偶内点法在搜索中给每个违背程度设定目标μ>0,寻找能够减小当前的互补松弛结果与目标差异的可行移动方向,并且逐渐减少μ到0,实现互补松弛,这需要:
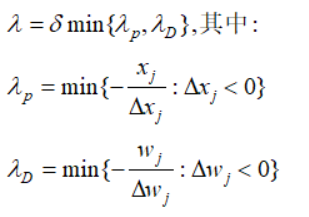
接下来剩下最后一个问题:步长λ的确定。算法通过调整一个正的障碍因子(boundary prevention)——常数δ使得搜索过程保持在可行域内部
综上,我们得到原始对偶内点法的步骤:
该算法我们这里不做实现,以后会结合对偶理论一起出实现代码!今天就先结束吧,祝国庆快乐!!
【附录】:
#放射尺度变换
import sys
import numpy as np
c = np.array([90,150,0])
A = np.array([0.5,1,1])
# D = []
t = 0
x_t = np.array([1,0.5,2])
while True:
# D.append(list(x_t))
print('t={}时的目标取值:{}'.format(t,np.dot(c,x_t)))
for i in list(x_t):
if round(i,6) == 0:
print('迭代结束,最优解为{}'.format(np.around(x_t,4)))
sys.exit()
X_t = np.diag(x_t)
c_t = np.dot(c,X_t)
A_t = np.dot(A,X_t)
P_t = np.identity(3) - np.dot(A_t.reshape(3,1),A_t.reshape(1,3))/np.dot(A_t,A_t.T)
delat_x = np.dot(X_t,np.dot(P_t,c_t))
print('移动方向:{}'.format(np.around(delat_x,2)))
a = np.dot(delat_x,np.linalg.inv(X_t))
lam = 1/np.sqrt(np.dot(a,a))
print('步长大小:{:.5f}'.format(lam))
x_t = x_t + lam*delat_x
print('下一搜索点:{}'.format(np.around(x_t,4)))
t += 1
# D.append(list(delat_x))
print('*****************************************')#对数障碍法
import numpy as np
import pandas as pd
c = np.array([90,150,0])
A = np.array([0.5,1,1])
D = []
t = 0
x_t = np.array([1,0.5,2])
y = 0
u = 16
while True:
D.append(list(x_t))
y_old = np.dot(c, x_t)+u*np.sum(np.log(x_t))
print('t={}时的实际目标值:{}'.format(t,np.dot(c,x_t)))
print('t={}时的障碍目标值:{}'.format(t, y_old))
X_t = np.diag(x_t)
c_t = np.dot(c,X_t)
A_t = np.dot(A,X_t)
P_t = np.identity(3) - np.dot(A_t.reshape(3,1),A_t.reshape(1,3))/np.dot(A_t,A_t.T)
delat_x = np.dot(np.dot(X_t,P_t),c_t+u)
print('移动方向:{}'.format(np.around(delat_x,3)))
lam_list = []
for i in range(3):
if delat_x[i] < 0:
lam_list.append(-0.9*x_t[i] / delat_x[i])
lam = min(1/u,min(lam_list))
print('障碍因子为:{},步长大小:{:.5f}'.format(u,lam))
x_t = x_t + lam*delat_x
print('下一搜索点:{}'.format(np.around(x_t,4)))
y_new = np.dot(c, x_t)+u*np.sum(np.log(x_t))
t += 1
if y_new - y_old < 1:
if u < 0.5:
print('迭代结束,最优解为{}'.format(np.around(x_t, 2)))
break
else:
u = u/2
else:
continue
# D.append(list(delat_x))
print('*****************************************')import matplotlib.pyplot as plt
plt.rcParams['font.sans-serif']=['SimHei']
plt.rcParams['axes.unicode_minus']=False
fig = plt.figure(figsize=(12,6))
ax = plt.axes(projection='3d')
ax.scatter(A['x1'],A['x2'],A['x3'],color='red',s=25)
ax.quiver(A['x1'],A['x2'],A['x3'],A['u'],A['v'],A['w'],arrow_length_ratio=0.2,color='black')
ax.set_xlabel('x1')
ax.set_ylabel('x2')
ax.set_zlabel('x3')
ax.set_xlim(0,6)
ax.set_ylim(0,3)
ax.set_zlim(0,2)
ax.set_title('弗兰妮木柴问题搜索过程')
plt.show()plt.figure(figsize=(6,4))
plt.fill_between(np.linspace(0,6,500),np.tile(np.array(0),500),3-0.5*np.linspace(0,6,500),facecolor="#DCDCDC")
plt.scatter(A['x1'],A['x2'],color='black',linewidths=0.5)
# plt.text(-6,-1,s='X0(-5,0)',verticalalignment='bottom')
for _,row in A.iterrows():
plt.arrow(row.x1, row.x2, row.u, row.v, length_includes_head=True, head_width=0.1, width=0.02, alpha=0.1, fc='#CD2626', ec='blue')
plt.xlim(0,6)
plt.ylim(0,3)
plt.xlabel("x1")
plt.ylabel("x2")
plt.title("弗兰妮木柴问题二维搜索过程")
plt.tight_layout()
plt.show()快速求三阶矩阵的逆矩阵前言一般情况下,我们求解伴随矩阵是要注意符号问题和位置问题的(如下所示)A−1=1[ ][−[ ]−[ ]−[ ] −[ ]]=A−1=1[ ][ M11−[M12] M13−[M21] M22−[M23] M31−[M32] M33]⊤\begin{aligned}&A^{-1}=\frac{1}{[\\]}\left[\begin{array}{cccccc}&-[\\]&\\-[\\]&&-[\\]\\\\&-[\\]&\\\end{array}\right]=\\\\&A^{-1}=\frac{1}{[\\]}\left[\b
【动态规划】一、背包问题1.背包问题总结1)动规四部曲:2)递推公式总结:3)遍历顺序总结:2.01背包1)二维dp数组代码实现2)一维dp数组代码实现3.完全背包代码实现4.多重背包代码实现一、背包问题1.背包问题总结暴力的解法是指数级别的时间复杂度。进而才需要动态规划的解法来进行优化!背包问题是动态规划(DynamicPlanning)里的非常重要的一部分,关于几种常见的背包,其关系如下:在解决背包问题的时候,我们通常都是按照如下五部来逐步分析,把这五部都搞透了,算是对动规来理解深入了。1)动规四部曲:(1)确定dp数组及其下标的含义(2)确定递推公式(3)dp数组的初始化(4)确定遍历顺
中国民用飞机制造行业市场现状规模及发展战略规划报告2021-2027年详情内容请咨询鸿晟信合研究院!【全新修订】:2022年2月【撰写单位】:鸿晟信合研究研究【报告目录】第1章:中国民用飞机制造行业发展综述1.1民用飞机制造行业概述1.1.1民用飞机的概念1.1.2飞机制造的概念1.1.3民用飞机的分类1.2民机制造行业周期特性1.2.1影响行业周期的因素(1)GDP增速分析(2)运量增量分析(3)飞机更替分析(4)航空公司获利水平1.2.2行业现阶段周期分析1.2.3行业现阶段景气分析1.3民机制造信息化分析1.3.1信息化技术应用状况分析(1)MDO技术应用分析(2)供应链协同研发分析(3
是否有Ruby库允许我对一组数据进行线性或非线性最小二乘法逼近。我想做的是:给定一系列[x,y]数据点针对该数据生成线性或非线性最小二乘法近似值库不必弄清楚它是否需要进行线性或非线性近似。库的调用者应该知道他们需要什么类型的回归我不想尝试移植某些C/C++/Java库来获得此功能,因此我希望有一些现有的Ruby库可供我使用。 最佳答案 尝试使用“statsample”gem。您可以使用下面提供的示例执行对数、指数、幂或任何其他转换。我希望这有帮助。require'statsample'#IndependentVariablex_da
1.变换1.1什么是变换?变换(Transform)是计算机图形学中非常重要的一部分。变换包含模型变换(Modelingtransform)以及视图变换(Viewtransform)。模型变换指的是变换模型(被拍摄物体)的位置,大小和角度;视图变换指的是变换照相机的位置和角度。从相对运动的角度来看,两种变换是可以相互转化的。1.2模型变换1.2.1二维变换缩放变换缩放变换(Scale)中,如果一个图片以原点(0,0)为中心缩放𝑠倍。那么点(𝑥,𝑦)变换后数学形式可以表示为写成矩阵形式为:当然,我们也可以给x轴和y轴不同的缩放倍数𝑠𝑥和𝑠𝑦。在非均匀情况下,缩放变换的矩阵形式为反射变换反射变换(
目录类01背包问题,选or不选变种走方格类01背包问题,选or不选不同的子序列_牛客题霸_牛客网问题翻译: S有多少个不同的子串与T相同 S[1:m]中的子串与T[1:n]相同的个数 由S的前m个字符组成的子串与T的前n个字符相同的个数状态: 子状态:由S的前1,2,...,m个字符组成的子串与T的前1,2,...,n个字符相同的个数 F(i,j):S[1:i]中的子串与T[1:j]相同的个数状态递推: 在F(i,j)处需要考虑S[i]=T[j]和S[i]!=T[j]两种情况 当S[i]=T[j]
第一章、绪论1、数据结构三要素:逻辑结构、存储结构(物理结构)、数据的运算。(1)逻辑结构:是指数据元素之间的逻辑关系,即从逻辑关系上描述数据,它与数据的存储无关,是独立于计算机的。(2)存储结构(物理结构):是指数据在计算机中的表示(又称映像),是用计算机语言实现的逻辑结构,它依赖于计算机语言。顺序存储:把逻辑上相邻的元素存储在物理位置上也相邻的存储单元中,元素之间的关系由存储单元的邻接关系来体现(e.g.数组)。优点:①可以实现随机存取;②每个元素占用最少的存储空间;缺点:只能使用相邻的一整块存储单元,因此可能产生较多的外部碎片;链式存储:不要求逻辑上相邻的元素在物理位置上也相邻,借助指示
我是一个Perl的人,我已经做了一段时间这样的哈希:my%date;#Assumethescalarsarecalledwith'my'earlier$date{$month}{$day}{$hours}{$min}{$sec}++现在我正在学习Ruby,到目前为止我发现使用这棵树是做很多键和一个值的方法。有什么方法可以只用一行来使用我在Perl中使用的简单格式吗?@date={month=>{day=>{hours=>{min=>{sec=>1}}}}} 最佳答案 不幸的是,没有简单实用的方法。一个Ruby等价物将是一个丑陋、丑陋
一)基本理解:1、动态规划定义:将将原问题拆解为若干个子问题,同时保留子问题的答案,使得每个子问题只求解一次最终得到原问题的答案。 这样一听总感觉和分治算法很像,其实动态规划就是将分治递归算法转化成了非递归形式,减少了系统栈的调用,使用循环来解决问题。2、动态规划算法的说白了就是找到整个问题的全局最优解,这也是与贪心算法寻找局部最优解的本质区别。3、通常我们可以先用从顶向下的思考方式来写出递归分治的代码,然后再联想从低向下的思想来转化为动态规划代码.4、无论是递归还是动态规划首先我们一定要找到这个问题的最小子问题,即一眼就能看出结果的那个小问题,然后根据这个关系来找递归关系。5、
catalogue关键字一些符号和特殊表示预备知识正文(一)不确定系统的数学表示(二)线性时不变定常系统的LMI稳定性定理(判据)2.1系统模型2.2当u=w=0时系统的LMI稳定性判据2.3.当u=0,w!=0时的保H无穷性能定理(三)多面体模型表示的不确定系统在不同工况下的稳定性定理3.1不确定系统模型的多面体表达式3.2参数无关的鲁棒状态反馈控制率:u=kx3.2.1闭环系统鲁棒稳定性3.2.2闭环系统鲁棒稳定性、保H无穷性能3.3参数相关的鲁棒状态反馈控制率:u=ai*ki*x3.3.1.状态反馈控制下的闭环系统鲁棒稳定性定理(w=0)3.3.2.状态反馈控制下的保H无穷性能、闭环系统