文章目录
举例:
对于三元线性方程组
{
a
11
x
1
+
a
12
x
2
+
a
13
x
3
=
b
1
a
21
x
1
+
a
22
x
2
+
a
23
x
3
=
b
2
a
31
x
1
+
a
32
x
2
+
a
33
x
3
=
b
3
(1)
\begin{cases} a_{11}x_{1}+a_{12}x_2+a_{13}x_3=b_1\\ a_{21}x_1+a_{22}x_2+a_{23}x_3=b_2\\ a_{31}x_1+a_{32}x_2+a_{33}x_3=b_3 \end{cases} \tag{1}
⎩
⎨
⎧a11x1+a12x2+a13x3=b1a21x1+a22x2+a23x3=b2a31x1+a32x2+a33x3=b3(1)
其中,
x
j
(
j
=
1
,
2
,
3
)
x_j(j=1,2,3)
xj(j=1,2,3)表示未知量,
a
i
j
(
i
=
1
,
2
,
3
;
j
=
1
,
2
,
3
)
a_{ij}(i=1,2,3;j=1,2,3)
aij(i=1,2,3;j=1,2,3)表示未知量的系数,
b
i
(
i
=
1
,
2
,
3
)
b_i(i=1,2,3)
bi(i=1,2,3)表示常数项。若采用代入消元法从式(1)中消去
x
2
,
x
3
x_2,x_3
x2,x3,可以得到
x
1
x_1
x1,计算过程跟二元线性方程组类似。
(
a
11
a
22
a
33
+
a
11
a
23
a
31
+
a
13
a
21
a
32
−
a
11
a
23
a
32
−
a
12
a
21
a
33
−
a
13
a
22
a
31
)
x
1
=
b
1
a
22
a
33
+
b
2
a
13
a
32
+
b
3
a
12
a
23
−
b
1
a
23
a
32
−
b
2
a
12
a
33
−
b
3
a
13
a
22
(2)
(a_{11}a_{22}a_{33}+a_{11}a_{23}a_{31}+a_{13}a_{21}a_{32}-a_{11}a_{23}a_{32}-a_{12}a_{21}a_{33}-a_{13}a_{22}a_{31})x_1\\ =b_1a_{22}a_{33}+b_2a_{13}a_{32}+b_3a_{12}a_{23}-b_1a_{23}a_{32}-b_2a_{12}a_{33}-b_3a_{13}a_{22} \tag{2}
(a11a22a33+a11a23a31+a13a21a32−a11a23a32−a12a21a33−a13a22a31)x1=b1a22a33+b2a13a32+b3a12a23−b1a23a32−b2a12a33−b3a13a22(2)
同理可以得出仅含有
x
2
,
x
3
x_2,x_3
x2,x3的等式,可自行写出。
若把式子(2)中的
x
1
x_1
x1的系数用D表示,即:
D
=
∣
a
11
a
12
a
13
a
21
a
22
a
23
a
31
a
32
a
33
∣
=
a
11
a
22
a
33
+
a
11
a
23
a
31
+
a
13
a
21
a
32
−
a
11
a
23
a
32
−
a
12
a
21
a
33
−
a
13
a
22
a
31
(3)
D=\left|\begin {array}{c} a_{11} &a_{12} &a_{13} \\ a_{21} &a_{22} &a_{23} \\ a_{31} &a_{32} &a_{33} \\ \end{array}\tag{3}\right|=a_{11}a_{22}a_{33}+a_{11}a_{23}a_{31}+a_{13}a_{21}a_{32}-a_{11}a_{23}a_{32}-a_{12}a_{21}a_{33}-a_{13}a_{22}a_{31}
D=
a11a21a31a12a22a32a13a23a33
=a11a22a33+a11a23a31+a13a21a32−a11a23a32−a12a21a33−a13a22a31(3)

则称式(3)中的D为三元线性方程组(1)的系数行列式,根据三阶行列式的定义,有:
D
=
∣
b
1
a
12
a
13
b
2
a
22
a
23
b
3
a
32
a
33
∣
=
b
1
a
22
a
33
+
a
12
a
23
b
3
+
a
13
b
2
a
32
−
b
1
a
23
a
32
−
a
12
b
2
a
33
−
a
13
a
22
b
3
(4)
D=\left|\begin {array}{c} b_1&a_{12} &a_{13} \\ b_2 &a_{22} &a_{23} \\ b_3 &a_{32} &a_{33} \\ \end{array}\tag{4}\right|=b_1a_{22}a_{33}+a_{12}a_{23}b_3+a_{13}b_2a_{32}-b_1a_{23}a_{32}-a_{12}b_2a_{33}-a_{13}a_{22}b_3
D=
b1b2b3a12a22a32a13a23a33
=b1a22a33+a12a23b3+a13b2a32−b1a23a32−a12b2a33−a13a22b3(4)
同理,可得:
D
2
=
∣
a
11
b
1
a
13
a
21
b
2
a
23
a
31
b
3
a
33
∣
,
D
3
=
∣
a
11
a
12
b
1
a
21
a
22
b
2
a
31
a
32
b
3
∣
D_2=\left|\begin{array}{c} a_{11}&b_1&a_{13}\\ a_{21}&b_2&a_{23}\\ a_{31}&b_3&a_{33} \end{array}\right| ,\ D_3=\left|\begin{array}{c} a_{11}&a_{12}&b_1\\ a_{21}&a_{22}&b_2\\ a_{31}&a_{32}&b_3 \end{array}\right|
D2=
a11a21a31b1b2b3a13a23a33
, D3=
a11a21a31a12a22a32b1b2b3
若系数行列式
D
≠
0
,
D\neq0,
D=0,则三元线性方程组(1)的唯一解为:
x
1
=
D
1
D
,
x
2
=
D
2
D
,
x
3
=
D
3
D
x_1=\frac{D_1}{D}, x_2=\frac{D_2}{D},x_3=\frac{D_3}{D}
x1=DD1,x2=DD2,x3=DD3
这里的
D
1
,
D
2
,
D
3
D_1,D_2,D_3
D1,D2,D3分别是D中的第一、二、三列元素换成
b
1
,
b
2
,
b
3
b_1,b_2,b_3
b1,b2,b3而得到的。
上述用三阶行列式解三元线性方程组的方法就称为三元线性方程组的克拉默法则。
(1)上三角行列式
主对角线左下方元素全为零的行列式称为上三角行列式。上三角行列式的值等于主对角线元素的乘积。
∣
a
11
a
12
…
a
1
n
0
a
22
…
a
2
n
⋮
⋮
⋮
0
0
…
a
n
n
∣
=
a
11
a
22
…
a
n
n
\left|\begin{array}{c} a_{11}&a_{12}&\dots&a_{1n}\\ 0&a_{22}&\dots&a_{2n}\\ \vdots&\vdots& &\vdots\\ 0&0&\dots&a_{nn} \end{array}\right|=a_{11}a_{22}\dots a_{nn}
a110⋮0a12a22⋮0………a1na2n⋮ann
=a11a22…ann
(2)下三角行列式
主对角右上方元素全为零的行列式称为下三角行列式。下三角行列式的值也和上三角的一样,为主对角线元素的乘积。
∣
a
11
0
…
0
a
21
a
22
…
0
⋮
⋮
⋮
a
n
1
a
n
2
…
a
n
n
∣
=
a
11
a
22
…
a
n
n
\left|\begin{array}{c} a_{11}&0&\dots&0\\ a_{21}&a_{22}&\dots&0\\ \vdots&\vdots& &\vdots\\ a_{n1}&a_{n2}&\dots&a_{nn} \end{array}\right|=a_{11}a_{22}\dots a_{nn}
a11a21⋮an10a22⋮an2………00⋮ann
=a11a22…ann
(3)对角行列式
主对角元素以外元素全为零的行列式称为对角行列式。对角行列式既是上三角行列式,又是下三角行列式,其值等于主对角线元素的成绩。
∣
a
11
0
…
0
0
a
22
…
0
⋮
⋮
⋮
0
0
…
a
n
n
∣
=
a
11
a
22
…
a
n
n
\left|\begin{array}{c} a_{11}&0&\dots&0\\ 0&a_{22}&\dots&0\\ \vdots&\vdots& &\vdots\\ 0&0&\dots&a_{nn} \end{array}\right|=a_{11}a_{22}\dots a_{nn}
a110⋮00a22⋮0………00⋮ann
=a11a22…ann
性质1:行列式与它的转置行列式相等,即
D
=
D
T
D=D^{T}
D=DT。
性质2:交换行列式的任意两行(列),行列式仅仅改变符号,即正的变负的,负的变正的。
推论3:如果行列式中有两行(列)对应元素相同,则此行列式的值为0。
证明:由性质2可知,
D
=
−
D
D=-D
D=−D,则
2
D
=
0
2D=0
2D=0,故
D
=
0
D=0
D=0。
性质3:如果将行列式D的某一行(列)的所有元素同乘以数k,其结果等于用数k乘以此行列式D。
推论4:如果行列式D中的某一行(列)的所有元素都有公因子k,则可以把k提到行列式的外面。
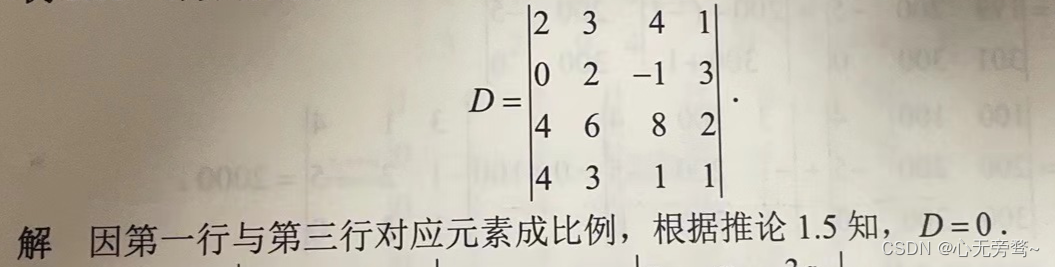
推论5:如果行列式中有两行(列)元素对应成比例,则此行列式的值等于0。
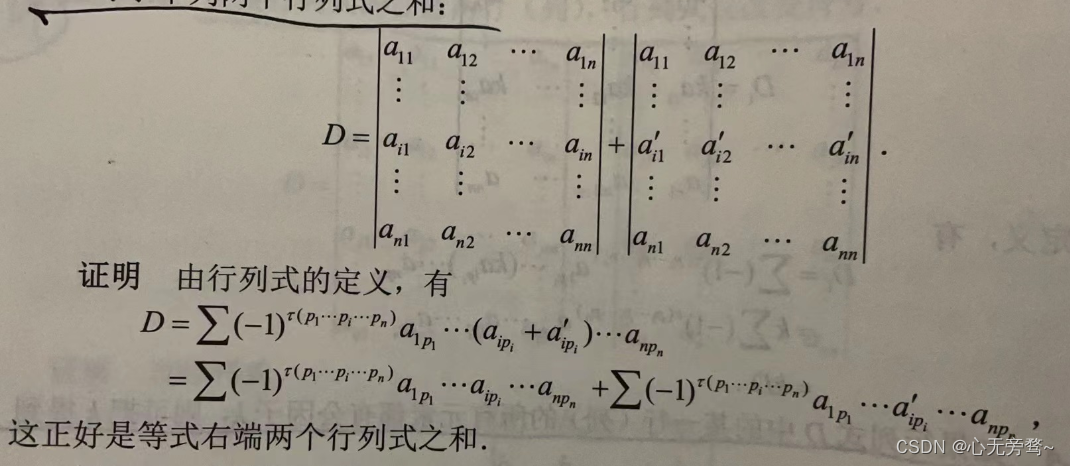
性质4:若行列式D中的某一行(列)的元素都是两数之和,例如,第
i
i
i行的元素是两数之和。
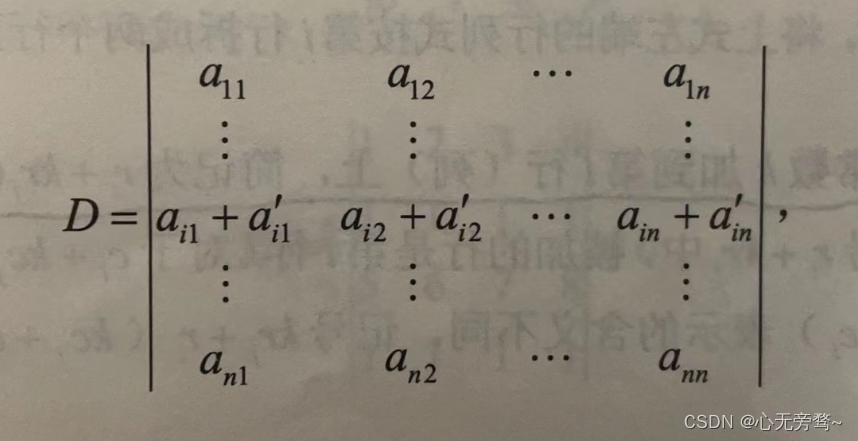
则D等于下列两个行列式之和:
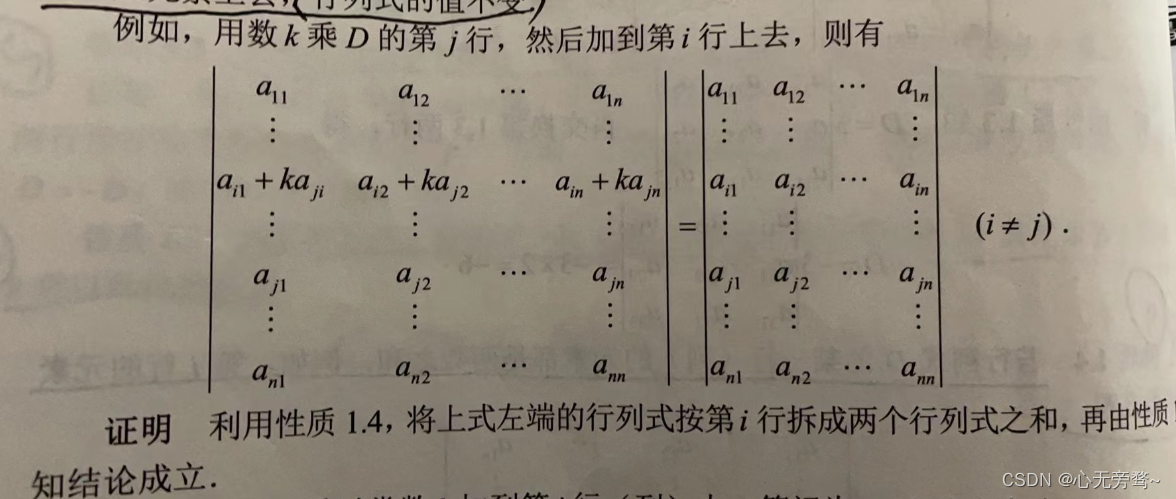
性质5:把行列式某一行(列)的各元素都乘以同一常数k,然后加到另一行(列)的对应元素上去,行列式的值不变。
在n阶行列式
D
=
d
e
t
(
a
i
j
)
D=det(a_{ij})
D=det(aij)中,划去元素
a
i
j
a_{ij}
aij所在的第
i
i
i行和第
j
j
j列后,余下的元素按照原来的位置构成
n
−
1
n-1
n−1阶行列式,称为
D
D
D中元素
a
i
j
a_{ij}
aij的余子式,记为
M
i
j
M_{ij}
Mij。
a
i
j
a_{ij}
aij的余子式
M
i
j
M_{ij}
Mij前添加符号
(
−
1
)
i
+
j
(-1)^{i+j}
(−1)i+j,称为元素
a
i
j
a_{ij}
aij的代数余子式,记作
A
i
j
A_{ij}
Aij,即:
A
i
j
=
(
−
1
)
i
+
j
M
i
j
A_{ij}=(-1)^{i+j}M_{ij}
Aij=(−1)i+jMij
按照余子式、代数余子式的定义,三阶行列式的展开式可以改写为:
D
=
∣
a
11
a
12
a
13
a
21
a
22
a
23
a
31
a
32
a
33
∣
=
a
11
∣
a
22
a
23
a
32
a
33
∣
−
a
12
∣
a
21
a
23
a
31
a
33
∣
+
a
13
∣
a
21
a
22
a
31
a
32
∣
=
a
11
M
11
−
a
12
M
12
+
a
13
M
13
=
(
−
1
)
1
+
1
a
11
A
11
−
(
−
1
)
1
+
2
a
12
A
12
+
(
−
1
)
1
+
3
a
13
A
13
D=\left|\begin{array}{c} a_{11}&a_{12}&a_{13}\\ a_{21}&a_{22}&a_{23}\\ a_{31}&a_{32}&a_{33} \end{array}\right|=a_{11}\left|\begin{array}{c}a_{22}&a_{23}\\ a_{32}&a_{33}\end{array}\right|-a_{12}\left|\begin{array}{c}a_{21}&a_{23}\\ a_{31}&a_{33}\end{array}\right|+a_{13}\left|\begin{array}{c}a_{21}&a_{22}\\ a_{31}&a_{32}\end{array}\right|\\ =a_{11}M_{11}-a_{12}M_{12}+a_{13}M_{13}=(-1)^{1+1}a_{11}A_{11}-(-1)^{1+2}a_{12}A_{12}+(-1)^{1+3}a_{13}A_{13}
D=
a11a21a31a12a22a32a13a23a33
=a11
a22a32a23a33
−a12
a21a31a23a33
+a13
a21a31a22a32
=a11M11−a12M12+a13M13=(−1)1+1a11A11−(−1)1+2a12A12+(−1)1+3a13A13
定理:n阶行列式
D
=
d
e
t
(
a
i
j
)
D=det(a_{ij})
D=det(aij)等于它的任意一行(列)的各元素与其对应的代数余子式的乘积之和**,即:**
D
=
a
i
1
A
i
1
+
a
i
2
A
i
2
+
⋯
+
a
i
n
A
i
n
(
i
=
1
,
2
,
…
,
n
)
D=a_{i1}A_{i1}+a_{i2}A_{i2}+\dots+a_{in}A_{in}(i=1,2,\dots,n)
D=ai1Ai1+ai2Ai2+⋯+ainAin(i=1,2,…,n)
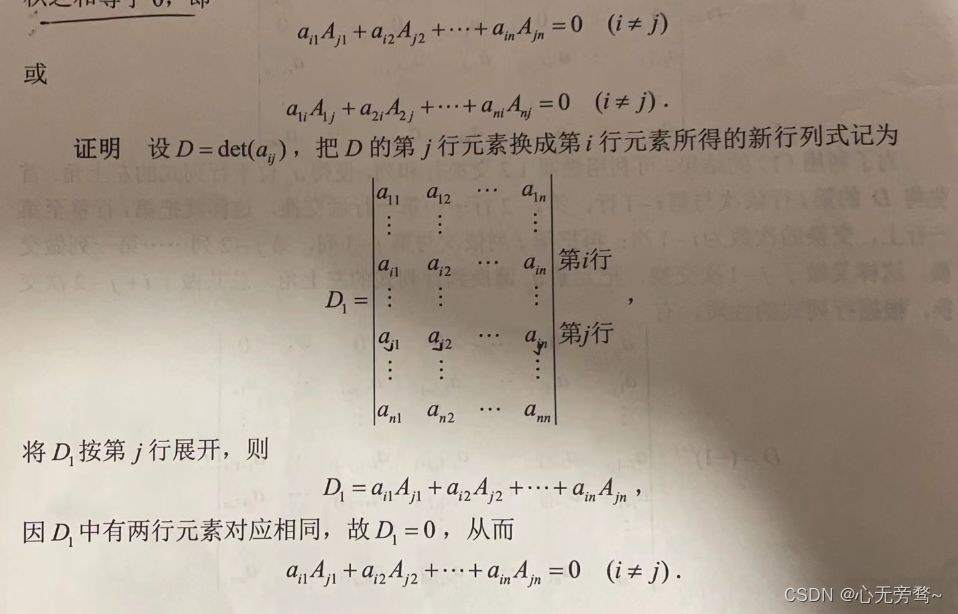
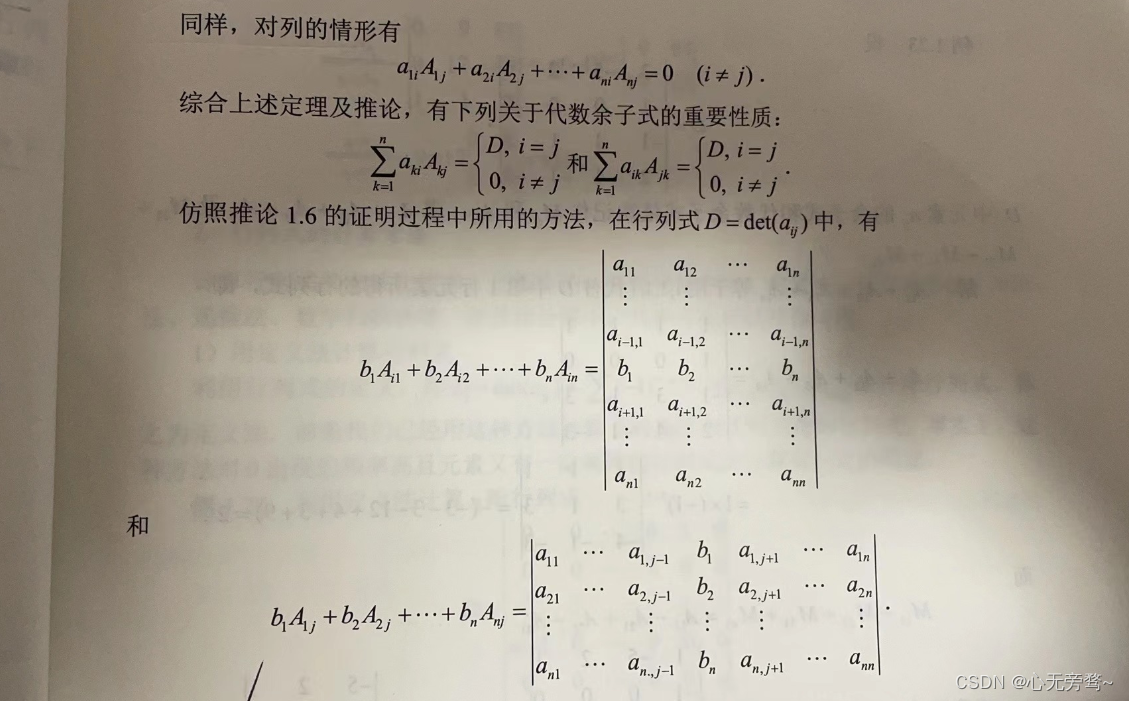
推论6:行列式某一行(列)的元素与另一行(列)对应元素的代数余子式的乘积之和等于0,即:
matlab打开matlab,用最简单的imread方法读取一个图像clcclearimg_h=imread('hua.jpg');返回一个数组(矩阵),往往是a*b*cunit8类型解释一下这个三维数组的意思,行数、数和层数,unit8:指数据类型,无符号八位整形,可理解为0~2^8的数三个层数分别代表RGB三个通道图像rgb最常用的是24-位实现方法,即RGB每个通道有256色阶(2^8)。基于这样的24-位RGB模型的色彩空间可以表现256×256×256≈1670万色当imshow传入了一个二维数组,它将以灰度方式绘制;可以把图像拆分为rgb三层,可以以灰度的方式观察它figure(1
快速求三阶矩阵的逆矩阵前言一般情况下,我们求解伴随矩阵是要注意符号问题和位置问题的(如下所示)A−1=1[ ][−[ ]−[ ]−[ ] −[ ]]=A−1=1[ ][ M11−[M12] M13−[M21] M22−[M23] M31−[M32] M33]⊤\begin{aligned}&A^{-1}=\frac{1}{[\\]}\left[\begin{array}{cccccc}&-[\\]&\\-[\\]&&-[\\]\\\\&-[\\]&\\\end{array}\right]=\\\\&A^{-1}=\frac{1}{[\\]}\left[\b
是否有Ruby库允许我对一组数据进行线性或非线性最小二乘法逼近。我想做的是:给定一系列[x,y]数据点针对该数据生成线性或非线性最小二乘法近似值库不必弄清楚它是否需要进行线性或非线性近似。库的调用者应该知道他们需要什么类型的回归我不想尝试移植某些C/C++/Java库来获得此功能,因此我希望有一些现有的Ruby库可供我使用。 最佳答案 尝试使用“statsample”gem。您可以使用下面提供的示例执行对数、指数、幂或任何其他转换。我希望这有帮助。require'statsample'#IndependentVariablex_da
1.变换1.1什么是变换?变换(Transform)是计算机图形学中非常重要的一部分。变换包含模型变换(Modelingtransform)以及视图变换(Viewtransform)。模型变换指的是变换模型(被拍摄物体)的位置,大小和角度;视图变换指的是变换照相机的位置和角度。从相对运动的角度来看,两种变换是可以相互转化的。1.2模型变换1.2.1二维变换缩放变换缩放变换(Scale)中,如果一个图片以原点(0,0)为中心缩放𝑠倍。那么点(𝑥,𝑦)变换后数学形式可以表示为写成矩阵形式为:当然,我们也可以给x轴和y轴不同的缩放倍数𝑠𝑥和𝑠𝑦。在非均匀情况下,缩放变换的矩阵形式为反射变换反射变换(
第一章、绪论1、数据结构三要素:逻辑结构、存储结构(物理结构)、数据的运算。(1)逻辑结构:是指数据元素之间的逻辑关系,即从逻辑关系上描述数据,它与数据的存储无关,是独立于计算机的。(2)存储结构(物理结构):是指数据在计算机中的表示(又称映像),是用计算机语言实现的逻辑结构,它依赖于计算机语言。顺序存储:把逻辑上相邻的元素存储在物理位置上也相邻的存储单元中,元素之间的关系由存储单元的邻接关系来体现(e.g.数组)。优点:①可以实现随机存取;②每个元素占用最少的存储空间;缺点:只能使用相邻的一整块存储单元,因此可能产生较多的外部碎片;链式存储:不要求逻辑上相邻的元素在物理位置上也相邻,借助指示
文章目录1、考试介绍2、软考网络工程师前景3、软考网络工程师考试内容4、华为命令总结1、考试介绍软考是一个以考试代替评职称的考试,每年都会举行两次考试,一般都在5月份和11月份考试,今年我们的省份取消了考试。具体参考官网中国计算机技术职业资格网可以在上面查看报考时间和报名等。本人准备2021年下半年全国计算机技术与软件专业技术中网络工程师,谁知道疫情就来的很巧,辛辛苦苦复习了三个月,终于整明白头绪了,但是天不遂人愿,疫情导致取消了考试,但是是害怕我是去捐款的吗?2、软考网络工程师前景随着计算机的远程信息化处理应用的高速发展和广泛应用,网络已成为经济发展的强大动力。计算机网络工程是计算机技术和通
我是一个Perl的人,我已经做了一段时间这样的哈希:my%date;#Assumethescalarsarecalledwith'my'earlier$date{$month}{$day}{$hours}{$min}{$sec}++现在我正在学习Ruby,到目前为止我发现使用这棵树是做很多键和一个值的方法。有什么方法可以只用一行来使用我在Perl中使用的简单格式吗?@date={month=>{day=>{hours=>{min=>{sec=>1}}}}} 最佳答案 不幸的是,没有简单实用的方法。一个Ruby等价物将是一个丑陋、丑陋
catalogue关键字一些符号和特殊表示预备知识正文(一)不确定系统的数学表示(二)线性时不变定常系统的LMI稳定性定理(判据)2.1系统模型2.2当u=w=0时系统的LMI稳定性判据2.3.当u=0,w!=0时的保H无穷性能定理(三)多面体模型表示的不确定系统在不同工况下的稳定性定理3.1不确定系统模型的多面体表达式3.2参数无关的鲁棒状态反馈控制率:u=kx3.2.1闭环系统鲁棒稳定性3.2.2闭环系统鲁棒稳定性、保H无穷性能3.3参数相关的鲁棒状态反馈控制率:u=ai*ki*x3.3.1.状态反馈控制下的闭环系统鲁棒稳定性定理(w=0)3.3.2.状态反馈控制下的保H无穷性能、闭环系统
我有一个3x3矩阵(startMatrix),它表示图像的实际View(平移、旋转和缩放)。现在我创建一个新矩阵(endMatrix),它有一个恒等矩阵、新的x和y坐标、新的Angular和新的比例,例如:endMatrix=translate(identityMatrix,-x,-y);endMatrix=rotate(endMatrix,angle);endMatrix=scale(endMatrix,scale);endMatrix=translate(endMatrix,(screen.width/2)/scale,screen.height/2)/scale);和功能(标准的