文章目录
这篇文章我主要讲的是让基于stm32单片机下的智能小车实现红外循迹功能,智能小车的项目非常多,比如说循迹避障、蓝牙遥控、视觉控制等等,我将会一步一步带大家走进stm32单片机的项目当中。
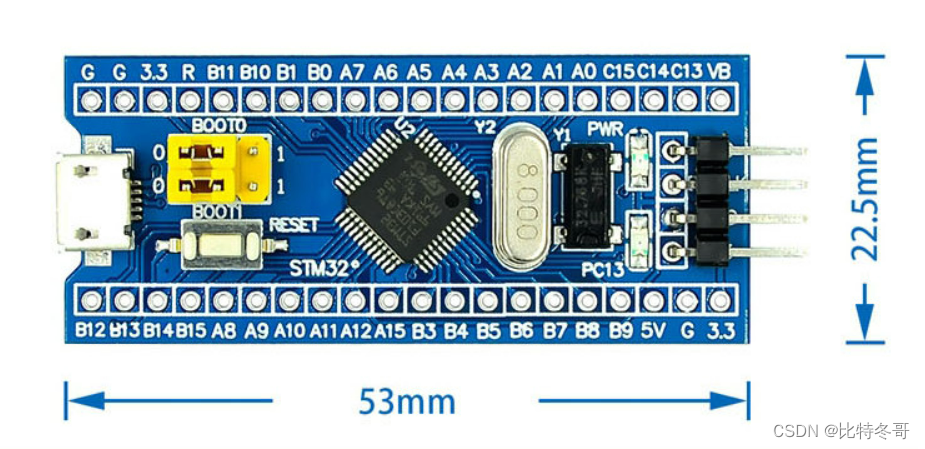
在硬件部分,与前几节我所介绍的51智能小车大致一样,所不同的是把51最小系统板换成了stm32最小系统板,其他驱动、红外循迹模块都一样,具体可前往【51单片机实例】智能小车(一)了解详情。
下面我还是会对相关重要模块进行简单介绍:
配套资源:
L298N,是一款接受高电压的电机驱动器,直流电机和步进电机都可以驱动。一片驱动芯片可同时控制两个直流减速电机做不同动作,在6V到46V的电压范围内,提供2安培的电流,并且具有过热自断和反馈检测功能,可对电机进行直接控制,通过主控芯片的I/O输入对其控制电平进行设定,就可为电机进行正转反转驱动,操作简单、稳定性好,可以满足直流电机的大电流驱动条件。

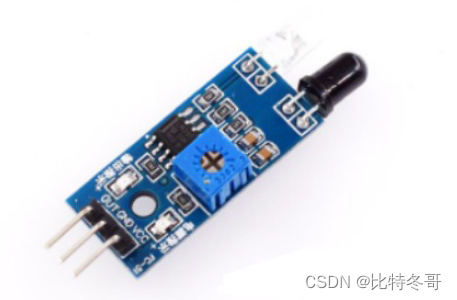
TCRT5000传感器的红外发射二极管不断发射红外线,当发射出的红外线没有被反射回来或被反射回来但强度不够大时,红外接收管一直处于关断状态,此时模块的输出端为高电平,指示二极管一直处于熄灭状态;被检测物体出现在检测范围内时,红外线被反射回来且强度足够大,红外接收管饱和,此时模块的输出端为低电平,指示二极管被点亮。
接口说明:
(1) VCC 外接3.3V-5V电压(可以直接与5v单片机和3.3v单片机相连)
(2) GND 外接GND
(3) OUT 小板数字量输出接口(0和1)
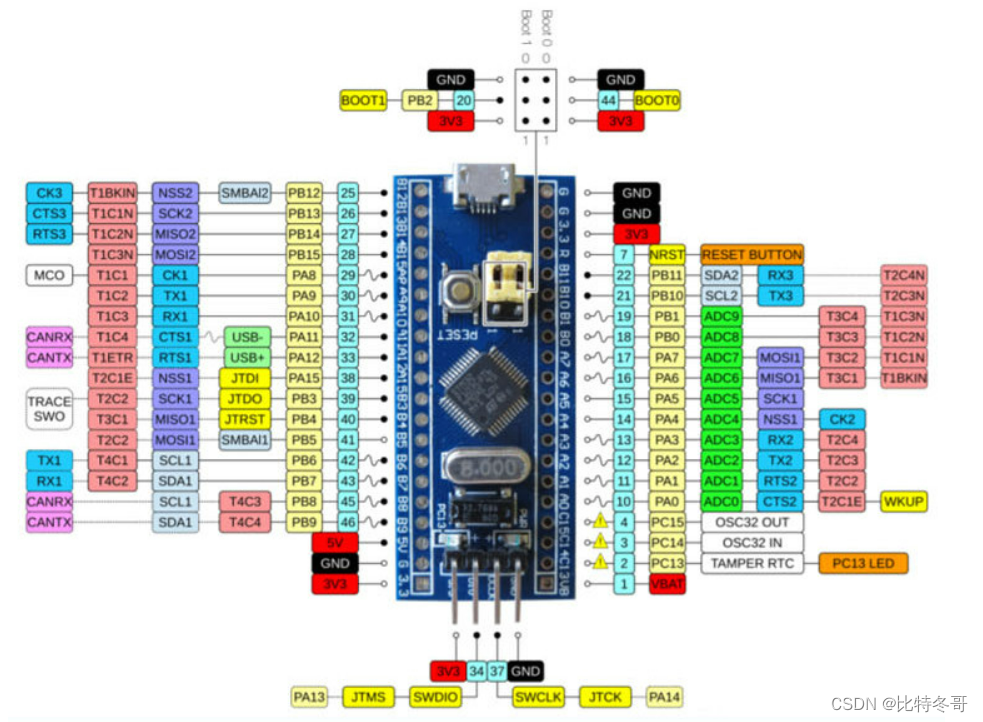
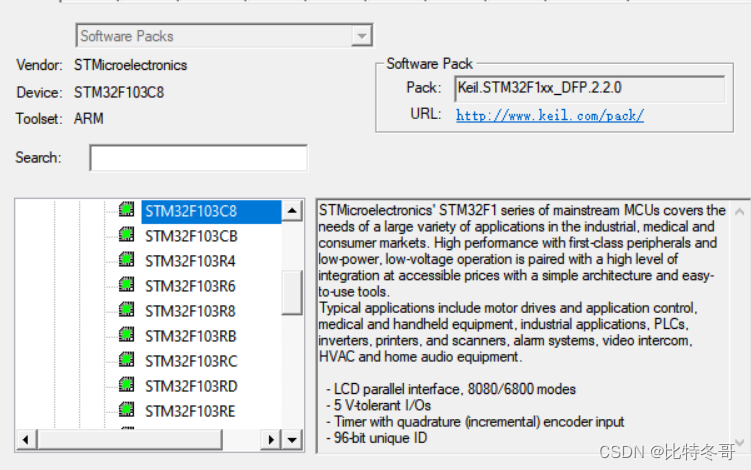
我们选用的是STM32F103C8T6最小系统板,所以Device应选择STM32F103C8
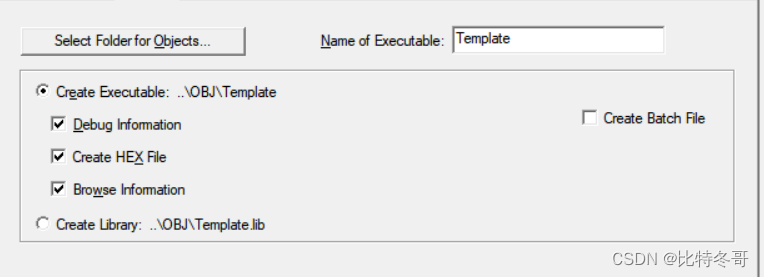
Output中应创建HEX可执行文件
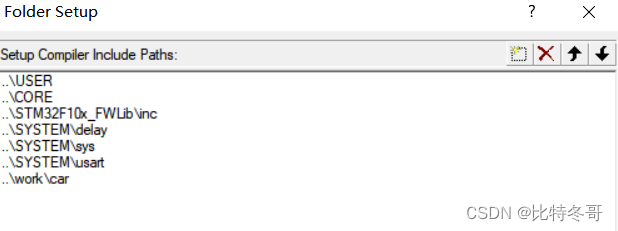
C/C++中应定义宏和包含文件路径

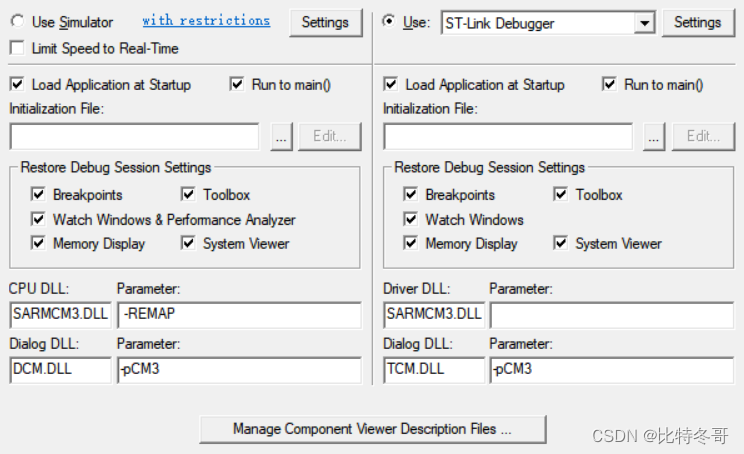
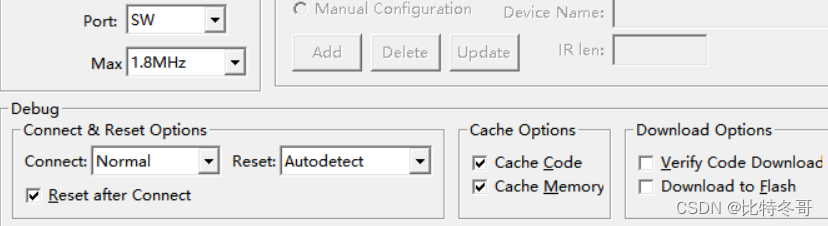
若选用 ST-link 或 J-link 还是其他下载器or串口,都需要事先安装相应的驱动和配置相关环境,这里我以ST-link为例配置相关环境
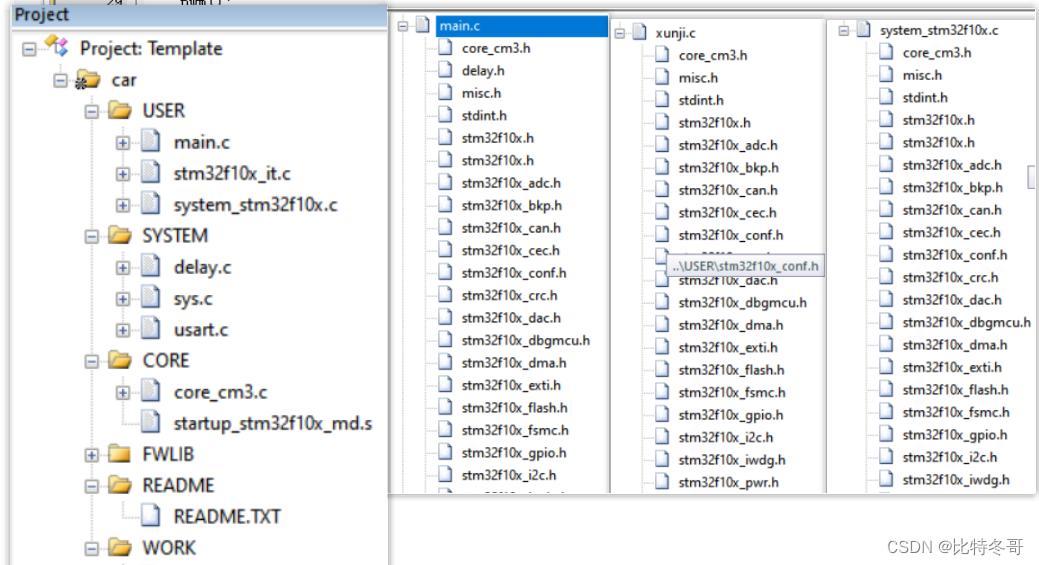
应在相应的工程文件下面添加上对应的.c文件
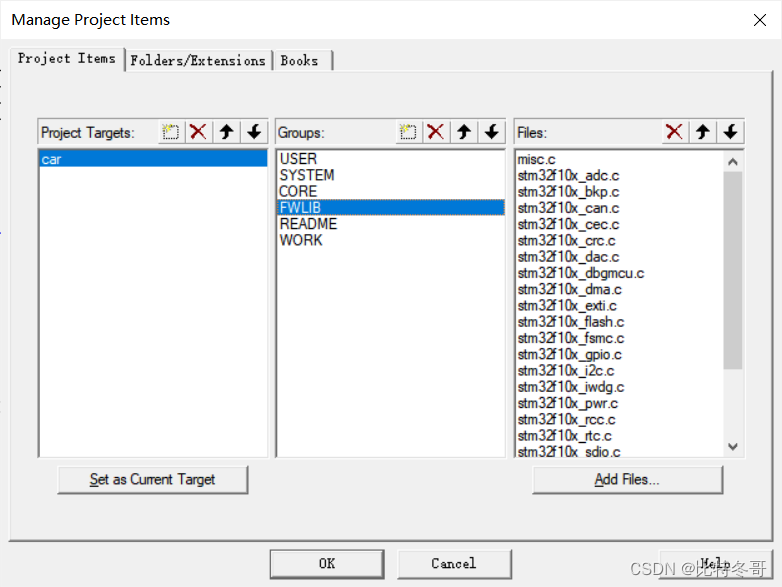
以下我主要说明几个比较重要的文件
#include "xunji.h"
#include "stm32f10x.h"
void motor_gpio()
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0|GPIO_Pin_1|GPIO_Pin_10|GPIO_Pin_11;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
}
void xunji_gpio()
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3|GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //上拉输入
GPIO_Init(GPIOA, &GPIO_InitStructure);
}
void pwm()
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_8;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE); //使能定时器4时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //使能GPIOB时钟
TIM_TimeBaseStructure.TIM_Period =99; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =71; //设置用来作为TIMx时钟频率除数的预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //选择定时器模式:TIM脉冲宽度调制模式1
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
TIM_OCInitStructure.TIM_Pulse=0;
TIM_OC1Init(TIM4, &TIM_OCInitStructure);
TIM_OC3Init(TIM4, &TIM_OCInitStructure);
TIM_OC1PreloadConfig(TIM4, TIM_OCPreload_Enable); //使能TIM4在CCR1上的预装载寄存器
TIM_OC3PreloadConfig(TIM4, TIM_OCPreload_Enable); //使能TIM4在CCR3上的预装载寄存器
TIM_Cmd(TIM4, ENABLE); //使能TIM4
}
void run()
{
TIM_SetCompare1(TIM4,30);
TIM_SetCompare3(TIM4,30);
IN1 = 1;
IN2 = 0;
IN3 = 1;
IN4 = 0;
}
void back()
{
TIM_SetCompare1(TIM4,70);
TIM_SetCompare3(TIM4,70);
IN1 = 0;
IN2 = 1;
IN3 = 0;
IN4 = 1;
}
void right()
{
TIM_SetCompare1(TIM4,0);
TIM_SetCompare3(TIM4,30);
IN1 = 1;
IN2 = 0;
IN3 = 0;
IN4 = 0;
}
void left()
{
TIM_SetCompare1(TIM4,30);
TIM_SetCompare3(TIM4,0);
IN1 = 0;
IN2 = 0;
IN3 = 1;
IN4 = 0;
}
void stop()
{
IN1 = 0;
IN2 = 0;
IN3 = 0;
IN4 = 0;
}
#ifndef __xunji_H
#define __xunji_H
#include "sys.h"
#define IN1 PBout(0)
#define IN2 PBout(1)
#define IN3 PBout(10)
#define IN4 PBout(11)
#define LEFT_ONE PAin(3)
#define LEFT_TWO PAin(7)
void run(void);
void left(void);
void right(void);
void back(void);;
void stop(void);
void motor_gpio(void);
void xunji_gpio(void);
void pwm(void);
#endif
#include "stm32f10x.h"
#include "xunji.h"
#include "delay.h"
void Init()
{
TIM_SetCompare1(TIM4,25);
TIM_SetCompare3(TIM4,25);
IN1=1;
IN2=0;
IN3=1;
IN4=0;
}
int main(void)
{
motor_gpio();
xunji_gpio();
pwm();
delay_init();
Init();
while(1)
{
if(LEFT_ONE==0&&LEFT_TWO==0)
{
run();
}
else if(LEFT_ONE==0&&LEFT_TWO==1)
{
right();
}
else if(LEFT_ONE==1&&LEFT_TWO==0)
{
left();
}
else if(LEFT_ONE==1&&LEFT_TWO==1)
{
run();
}
else
stop();
}
}
本节是以STM32F103C8T6最小系统为CPU,通过一些外围电路和软件编程实现小车红外循迹的功能。整个设计过程中最大的特点是利用简单的理论原理将红外循迹模块、L298N驱动模块、51单片机这三个模块有效的结合起来,利用红外循迹原理与pwm调节占空比的简单结合实现对小车红外循迹奠定编程理论基础,提高了效率,降低了编程的复杂度,具有很强的研究的意义,智能化的发展促使了智能小车往功能更加强大的方向发展。
我正在查看instance_variable_set的文档并看到给出的示例代码是这样做的:obj.instance_variable_set(:@instnc_var,"valuefortheinstancevariable")然后允许您在类的任何实例方法中以@instnc_var的形式访问该变量。我想知道为什么在@instnc_var之前需要一个冒号:。冒号有什么作用? 最佳答案 我的第一直觉是告诉你不要使用instance_variable_set除非你真的知道你用它做什么。它本质上是一种元编程工具或绕过实例变量可见性的黑客攻击
在我的应用程序中,我需要能够找到所有数字子字符串,然后扫描每个子字符串,找到第一个匹配范围(例如5到15之间)的子字符串,并将该实例替换为另一个字符串“X”。我的测试字符串s="1foo100bar10gee1"我的初始模式是1个或多个数字的任何字符串,例如,re=Regexp.new(/\d+/)matches=s.scan(re)给出["1","100","10","1"]如果我想用“X”替换第N个匹配项,并且只替换第N个匹配项,我该怎么做?例如,如果我想替换第三个匹配项“10”(匹配项[2]),我不能只说s[matches[2]]="X"因为它做了两次替换“1fooX0barXg
我有一个正在构建的应用程序,我需要一个模型来创建另一个模型的实例。我希望每辆车都有4个轮胎。汽车模型classCar轮胎模型classTire但是,在make_tires内部有一个错误,如果我为Tire尝试它,则没有用于创建或新建的activerecord方法。当我检查轮胎时,它没有这些方法。我该如何补救?错误是这样的:未定义的方法'create'forActiveRecord::AttributeMethods::Serialization::Tire::Module我测试了两个环境:测试和开发,它们都因相同的错误而失败。 最佳答案
我正在处理旧代码的一部分。beforedoallow_any_instance_of(SportRateManager).toreceive(:create).and_return(true)endRubocop错误如下:Avoidstubbingusing'allow_any_instance_of'我读到了RuboCop::RSpec:AnyInstance我试着像下面那样改变它。由此beforedoallow_any_instance_of(SportRateManager).toreceive(:create).and_return(true)end对此:let(:sport_
我收到格式为的回复#我需要将其转换为哈希值(针对活跃商家)。目前我正在遍历变量并执行此操作:response.instance_variables.eachdo|r|my_hash.merge!(r.to_s.delete("@").intern=>response.instance_eval(r.to_s.delete("@")))end这有效,它将生成{:first="charlie",:last=>"kelly"},但它似乎有点hacky和不稳定。有更好的方法吗?编辑:我刚刚意识到我可以使用instance_variable_get作为该等式的第二部分,但这仍然是主要问题。
文章目录1.开发板选择*用到的资源2.串口通信(个人理解)3.代码分析(注释比较详细)1.主函数2.串口1配置3.串口2配置以及中断函数4.注意问题5.源码链接1.开发板选择我用的是STM32F103RCT6的板子,不过代码大概在F103系列的板子上都可以运行,我试过在野火103的霸道板上也可以,主要看一下串口对应的引脚一不一样就行了,不一样的就更改一下。*用到的资源keil5软件这里用到了两个串口资源,采集数据一个,串口通信一个,板子对应引脚如下:串口1,TX:PA9,RX:PA10串口2,TX:PA2,RX:PA32.串口通信(个人理解)我就从串口采集传感器数据这个过程说一下我自己的理解,
我正在写一篇关于在Ruby中几乎一切都是对象的博客文章,我试图通过以下示例来展示这一点:classCoolBeansattr_accessor:beansdefinitialize@bean=[]enddefcount_beans@beans.countendend所以从类中我们可以看出它有4个方法(当然,除非我错了):它可以在创建新实例时初始化一个默认的空bean数组它可以计算它有多少个bean它可以读取它有多少个bean(通过attr_accessor)它可以向空数组写入(或添加)更多bean(也通过attr_accessor)但是,当我询问类本身它有哪些实例方法时,我没有看到默认
如果我有以下一段Ruby代码:classBlahdefself.bleh@blih="Hello"@@bloh="World"endend@blih和@@bloh到底是什么?@blih是Blah类中的一个实例变量,@@bloh是Blah类中的一个类变量,对吗?这是否意味着@@bloh是Blah的类Class中的一个变量? 最佳答案 人们似乎忽略了该方法是类方法。@blih将是常量Bleh的类Class实例的实例变量。因此:irb(main):001:0>classBlehirb(main):002:1>defself.blehirb
我理解(我认为)Ruby中类变量和类的实例变量之间的区别。我想知道如何从该类外部访问该类的实例变量。从内部(即在类方法中而不是实例方法中),它可以直接访问,但是从外部,有没有办法做MyClass.class.[@$#]variablename?我没有任何具体原因要这样做,只是学习Ruby并想知道是否可行。 最佳答案 classMyClass@my_class_instance_var="foo"class上述yield:>>foo我相信Arkku演示了如何从类外部访问类变量(@@),而不是类实例变量(@)。我从这篇文章中提取了上述内
print"Enteryourpassword:"pass=STDIN.noecho(&:gets)puts"Yourpasswordis#{pass}!"输出:Enteryourpassword:input.rb:2:in`':undefinedmethod`noecho'for#>(NoMethodError) 最佳答案 一开始require'io/console'后来的Ruby1.9.3 关于ruby-为什么不能使用类IO的实例方法noecho?,我们在StackOverflow上