现在ijkPlayer是许多播放器、直播平台的首选,相信很多开发者都接触过ijkPlayer,无论是Android工程师还是iOS工程师。我曾经在Github上的ijkPlayer开源项目上提问过:视频流为1080P、30fps,如何优化RTSP直播的延时为大约100ms呢?
发现大家对RTSP直播延时优化非常感兴趣,纷纷提问或者给出自己的观点。本文主要是总结,也是与大家探讨RTSP直播的延时优化。
目录
一、修改编译脚本支持RTSP
二、修改播放器的option参数
三、网络抖动的丢包
四、解码器设为零延时
五、减少FFmpeg拆帧等待延时
1、找到当前帧结束符
2、去掉parse_packet的while循环
3、 修改av_parser_parse2的帧偏移量
4、去掉parser_parse的寻找帧起始码
5、修改parser.c的组帧方法
ijkPlayer默认是没有把RTSP协议编译进去,所以我们得修改编译脚本,原来的disable改为enable:
export COMMON_FF_CFG_FLAGS="$COMMON_FF_CFG_FLAGS --enable-protocol=rtp" export COMMON_FF_CFG_FLAGS="$COMMON_FF_CFG_FLAGS --enable-protocol=tcp" export COMMON_FF_CFG_FLAGS="$COMMON_FF_CFG_FLAGS --enable-demuxer=rtsp" export COMMON_FF_CFG_FLAGS="$COMMON_FF_CFG_FLAGS --enable-demuxer=sdp" export COMMON_FF_CFG_FLAGS="$COMMON_FF_CFG_FLAGS --enable-demuxer=rtp"
二、修改播放器的option参数
//丢帧阈值 mediaPlayer.setOption(IjkMediaPlayer.OPT_CATEGORY_PLAYER, "framedrop", 30); //视频帧率 mediaPlayer.setOption(IjkMediaPlayer.OPT_CATEGORY_PLAYER, "fps", 30); //环路滤波 mediaPlayer.setOption(IjkMediaPlayer.OPT_CATEGORY_CODEC, "skip_loop_filter", 48); //设置无packet缓存 mediaPlayer.setOption(IjkMediaPlayer.OPT_CATEGORY_PLAYER, "packet-buffering", 0); mediaPlayer.setOption(IjkMediaPlayer.OPT_CATEGORY_FORMAT, "fflags", "nobuffer"); //不限制拉流缓存大小 mediaPlayer.setOption(IjkMediaPlayer.OPT_CATEGORY_PLAYER, "infbuf", 1); //设置最大缓存数量 mediaPlayer.setOption(IjkMediaPlayer.OPT_CATEGORY_FORMAT, "max-buffer-size", 1024); //设置最小解码帧数 mediaPlayer.setOption(IjkMediaPlayer.OPT_CATEGORY_PLAYER, "min-frames", 3); //启动预加载 mediaPlayer.setOption(IjkMediaPlayer.OPT_CATEGORY_PLAYER, "start-on-prepared", 1); //设置探测包数量 mediaPlayer.setOption(IjkMediaPlayer.OPT_CATEGORY_FORMAT, "probsize", "4096"); //设置分析流时长 mediaPlayer.setOption(IjkMediaPlayer.OPT_CATEGORY_FORMAT, "analyzeduration", "2000000");
值得注意的是,ijkPlayer默认使用udp拉流,因为速度比较快。如果需要可靠且减少丢包,可以改为tcp协议:
mediaPlayer.setOption(IjkMediaPlayer.OPT_CATEGORY_FORMAT, "rtsp_transport", "tcp");
另外,可以这样开启硬解码,如果打开硬解码失败,再自动切换到软解码:
mediaPlayer.setOption(IjkMediaPlayer.OPT_CATEGORY_PLAYER, "mediacodec", 0); mediaPlayer.setOption(IjkMediaPlayer.OPT_CATEGORY_PLAYER, "mediacodec-auto-rotate", 0); mediaPlayer.setOption(IjkMediaPlayer.OPT_CATEGORY_PLAYER, "mediacodec-handle-resolution-change", 0);
三、网络抖动的丢包
在拉流时,音频流、视频流是单独保存到缓冲队列的。如果发生网络抖动,就会引起缓冲抖动(JitBuffer),可以总结为网络卡顿导致音视频缓冲队列增大,从而导致解码滞后、播放滞后。此时,我们需要主动丢包来跟进当前时间戳。因为音视频同步一般以音频时钟为基准,人们对音频更加敏感,所以我们优先丢掉视频队列的包。但是,丢视频数据包时,需要丢掉整个GOP的数据包,因为B帧、P帧依赖I帧来解码,否则会引起花屏。有一位开发者叫做暴走大牙,他的一篇关于ijkPlayer直播延时的文章写得很好:ijkplay播放直播流延时控制小结
四、解码器设为零延时
大家应该听过编码器的零延时(zerolatency),但可能没听过解码器零延时。其实解码器内部默认会缓存几帧数据,用于后续关联帧的解码,大概是3-5帧。经过反复测试,发现解码器的缓存帧会带来100多ms延时。也就是说,假如能够去掉缓存帧,就可以减少100多ms的延时。而在avcodec.h文件的AVCodecContext结构体有一个参数(flags)用来设置解码器延时:
typedef struct AVCodecContext {
......
int flags;
......
}
为了去掉解码器缓存帧,我们可以把flags设置为CODEC_FLAG_LOW_DELAY。在初始化解码器时进行设置:
//set decoder as low deday codec_ctx->flags |= CODEC_FLAG_LOW_DELAY;
五、减少FFmpeg拆帧等待延时
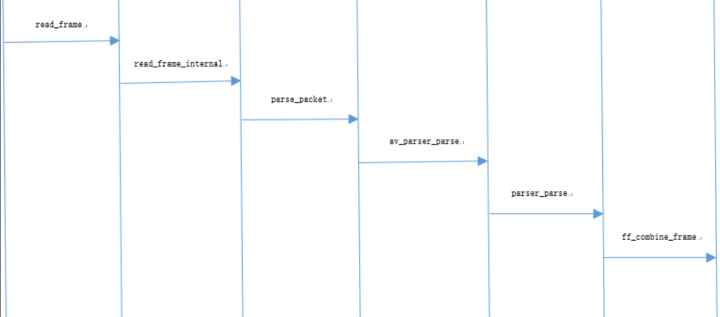
FFmpeg拆帧是根据下一帧的起始码来作为当前帧结束符,起始码一般是:0x00 0x00 0x00 0x01或者0x00 0x00 0x01。这样就会带来一帧的延时,这一帧延时能不能去掉呢?如果有帧结束符,我们以帧结束符来拆帧,这样做就能解决一帧延时。现在,问题变成找到帧结束符,然后替换成下一帧起始码来拆帧。整个调用流程是:read_frame—>read_frame_internal—>parse_packet—>av_parser_parse2—>parser_parse—>ff_combine_frame. 流程图如下:
在rtpdec.c文件的rtp_parse_packet_internal方法里,有获取帧结束符,也就是mark标志位,我们在这里设一个全局变量:
static int rtp_parse_packet_internal(RTPDemuxContext *s, AVPacket *pkt,
const uint8_t *buf, int len)
{
......
if (buf[1] & 0x80)
flags |= RTP_FLAG_MARKER;
//the end of a frame
mark_flag = flags;
......
}
2、去掉parse_packet的while循环
我们在外部调用libavformat模块的utils.c文件的read_frame读取一帧数据,而read_frame调用内部方法read_frame_internal,read_frame_internal接着调用parse_packet方法,在该方法里有一个while循环体。现在把循环体去掉,并且释放申请的内存:
static int parse_packet(AVFormatContext *s, AVPacket *pkt, int stream_index)
{
......
// while (size > 0 || (pkt == &flush_pkt && got_output)) {
int len;
int64_t next_pts = pkt->pts;
int64_t next_dts = pkt->dts;
av_init_packet(&out_pkt);
len = av_parser_parse2(st->parser, st->internal->avctx,
&out_pkt.data, &out_pkt.size, data, size,
pkt->pts, pkt->dts, pkt->pos);
pkt->pts = pkt->dts = AV_NOPTS_VALUE;
pkt->pos = -1;
/* increment read pointer */
data += len;
size -= len;
got_output = !!out_pkt.size;
if (!out_pkt.size){
av_packet_unref(&out_pkt);//release current packet
av_packet_unref(pkt);//release current packet
return 0;
// continue;
}
......
ret = add_to_pktbuf(&s->internal->parse_queue, &out_pkt,
&s->internal->parse_queue_end, 1);
av_packet_unref(&out_pkt);
if (ret < 0)
goto fail;
// }
/* end of the stream => close and free the parser */
if (pkt == &flush_pkt) {
av_parser_close(st->parser);
st->parser = NULL;
}
fail:
av_packet_unref(pkt);
return ret;
}
3、 修改av_parser_parse2的帧偏移量
在libavcodec模块的parser.c文件中,parse_packet调用到av_parser_parse2来解释数据包,该方法内部有记录帧偏移量。原先是等待下一帧的起始码,现在改为当前帧结束符,所以要把下一帧起始码这个偏移量长度去掉:
int av_parser_parse2(AVCodecParserContext *s, AVCodecContext *avctx,
uint8_t **poutbuf, int *poutbuf_size,
const uint8_t *buf, int buf_size,
int64_t pts, int64_t dts, int64_t pos)
{
......
/* WARNING: the returned index can be negative */
index = s->parser->parser_parse(s, avctx, (const uint8_t **) poutbuf,
poutbuf_size, buf, buf_size);
av_assert0(index > -0x20000000); // The API does not allow returning AVERROR codes
#define FILL(name) if(s->name > 0 && avctx->name <= 0) avctx->name = s->name
if (avctx->codec_type == AVMEDIA_TYPE_VIDEO) {
FILL(field_order);
}
/* update the file pointer */
if (*poutbuf_size) {
/* fill the data for the current frame */
s->frame_offset = s->next_frame_offset;
/* offset of the next frame */
// s->next_frame_offset = s->cur_offset + index;
//video frame don't plus index
if (avctx->codec_type == AVMEDIA_TYPE_VIDEO) {
s->next_frame_offset = s->cur_offset;
}else{
s->next_frame_offset = s->cur_offset + index;
}
s->fetch_timestamp = 1;
}
if (index < 0)
index = 0;
s->cur_offset += index;
return index;
}
4、去掉parser_parse的寻找帧起始码
av_parser_parse2调用到parser_parse方法,而我们这里使用的是h264解码,所以在libavcodec模块的h264_parser.c有一个结构体ff_h264_parser,把h264_parse赋值给parser_parse:
AVCodecParser ff_h264_parser = {
.codec_ids = { AV_CODEC_ID_H264 },
.priv_data_size = sizeof(H264ParseContext),
.parser_init = init,
.parser_parse = h264_parse,
.parser_close = h264_close,
.split = h264_split,
};
现在我们需要h264_parser.c文件的h264_parse方法,去掉寻找下一帧起始码作为当前帧结束符的过程:
static int h264_parse(AVCodecParserContext *s,
AVCodecContext *avctx,
const uint8_t **poutbuf, int *poutbuf_size,
const uint8_t *buf, int buf_size)
{
......
if (s->flags & PARSER_FLAG_COMPLETE_FRAMES) {
next = buf_size;
} else {
//TODO:don't use next frame start code, modify by xufulong
// next = h264_find_frame_end(p, buf, buf_size, avctx);
if (ff_combine_frame(pc, next, &buf, &buf_size) < 0) {
*poutbuf = NULL;
*poutbuf_size = 0;
return buf_size;
}
/* if (next < 0 && next != END_NOT_FOUND) {
av_assert1(pc->last_index + next >= 0);
h264_find_frame_end(p, &pc->buffer[pc->last_index + next], -next, avctx); // update state
}*/
}
......
}
h264_parse又调用parser.c的ff_combine_frame组帧方法,我们在这里把mark替换起始码作为帧结束符:
external int mark_flag;//引用全局变量
int ff_combine_frame(ParseContext *pc, int next,const uint8_t **buf, int *buf_size)
{
......
/* copy into buffer end return */
// if (next == END_NOT_FOUND) {
void *new_buffer = av_fast_realloc(pc->buffer, &pc->buffer_size,
*buf_size + pc->index +
AV_INPUT_BUFFER_PADDING_SIZE);
if (!new_buffer) {
pc->index = 0;
return AVERROR(ENOMEM);
}
pc->buffer = new_buffer;
memcpy(&pc->buffer[pc->index], *buf, *buf_size);
pc->index += *buf_size;
// return -1;
if(!mark_flag)
return -1;
next = 0;
// }
......
}
经过以上修改,局域网用电脑推送1080P、30fps的视频流,Android设备拉流解码播放,整体延时可优化至130ms左右。而手机推流,延时可达到86ms。
作者:徐福记456

★文末名片可以免费领取音视频开发学习资料,内容包括(FFmpeg ,webRTC ,rtmp ,hls ,rtsp ,ffplay ,srs)以及音视频学习路线图等等。
见下方!↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓
导读:随着叮咚买菜业务的发展,不同的业务场景对数据分析提出了不同的需求,他们希望引入一款实时OLAP数据库,构建一个灵活的多维实时查询和分析的平台,统一数据的接入和查询方案,解决各业务线对数据高效实时查询和精细化运营的需求。经过调研选型,最终引入ApacheDoris作为最终的OLAP分析引擎,Doris作为核心的OLAP引擎支持复杂地分析操作、提供多维的数据视图,在叮咚买菜数十个业务场景中广泛应用。作者|叮咚买菜资深数据工程师韩青叮咚买菜创立于2017年5月,是一家专注美好食物的创业公司。叮咚买菜专注吃的事业,为满足更多人“想吃什么”而努力,通过美好食材的供应、美好滋味的开发以及美食品牌的孵
C#实现简易绘图工具一.引言实验目的:通过制作窗体应用程序(C#画图软件),熟悉基本的窗体设计过程以及控件设计,事件处理等,熟悉使用C#的winform窗体进行绘图的基本步骤,对于面向对象编程有更加深刻的体会.Tutorial任务设计一个具有基本功能的画图软件**·包括简单的新建文件,保存,重新绘图等功能**·实现一些基本图形的绘制,包括铅笔和基本形状等,学习橡皮工具的创建**·设计一个合理舒适的UI界面**注明:你可能需要先了解一些关于winform窗体应用程序绘图的基本知识,以及关于GDI+类和结构的知识二.实验环境Windows系统下的visualstudio2017C#窗体应用程序三.
深度学习部署:Windows安装pycocotools报错解决方法1.pycocotools库的简介2.pycocotools安装的坑3.解决办法更多Ai资讯:公主号AiCharm本系列是作者在跑一些深度学习实例时,遇到的各种各样的问题及解决办法,希望能够帮助到大家。ERROR:Commanderroredoutwithexitstatus1:'D:\Anaconda3\python.exe'-u-c'importsys,setuptools,tokenize;sys.argv[0]='"'"'C:\\Users\\46653\\AppData\\Local\\Temp\\pip-instal
项目介绍随着我国经济迅速发展,人们对手机的需求越来越大,各种手机软件也都在被广泛应用,但是对于手机进行数据信息管理,对于手机的各种软件也是备受用户的喜爱小学生兴趣延时班预约小程序的设计与开发被用户普遍使用,为方便用户能够可以随时进行小学生兴趣延时班预约小程序的设计与开发的数据信息管理,特开发了小程序的设计与开发的管理系统。小学生兴趣延时班预约小程序的设计与开发的开发利用现有的成熟技术参考,以源代码为模板,分析功能调整与小学生兴趣延时班预约小程序的设计与开发的实际需求相结合,讨论了小学生兴趣延时班预约小程序的设计与开发的使用。开发环境开发说明:前端使用微信微信小程序开发工具:后端使用ssm:VU
需求:要创建虚拟机,就需要给他提供一个虚拟的磁盘,我们就在/opt目录下创建一个10G大小的raw格式的虚拟磁盘CentOS-7-x86_64.raw命令格式:qemu-imgcreate-f磁盘格式磁盘名称磁盘大小qemu-imgcreate-f磁盘格式-o?1.创建磁盘qemu-imgcreate-fraw/opt/CentOS-7-x86_64.raw10G执行效果#ls/opt/CentOS-7-x86_64.raw2.安装虚拟机使用virt-install命令,基于我们提供的系统镜像和虚拟磁盘来创建一个虚拟机,另外在创建虚拟机之前,提前打开vnc客户端,在创建虚拟机的时候,通过vnc
我正在寻找用于Rails的优质管理插件。似乎大多数现有的插件/gem(例如“restful_authentication”、“acts_as_authenticated”)都围绕着self注册等展开。但是,我正在寻找一种功能齐全的基于管理/管理角色的解决方案——但不是简单地附加到另一个非基于角色的解决方案。如果我找不到,我想我会自己动手......只是不想重新发明轮子。 最佳答案 RyanBates最近做了两个关于授权的railscast(注意身份验证和授权之间的区别;身份验证检查用户是否如她所说的那样,授权检查用户是否有权访问资源
我正在根据Rakefile中的现有测试文件动态生成测试任务。假设您有各种以模式命名的单元测试文件test_.rb.所以我正在做的是创建一个以“测试”命名空间内的文件名命名的任务。使用下面的代码,我可以用raketest:调用所有测试require'rake/testtask'task:default=>'test:all'namespace:testdodesc"Runalltests"Rake::TestTask.new(:all)do|t|t.test_files=FileList['test_*.rb']endFileList['test_*.rb'].eachdo|task|n
我想要像“嘿那里”这样的东西变成,例如,#316583。我希望将任意长度的字符串“归结”为十六进制颜色。我不知道从哪里开始。我在想,每个字符串的MD5散列都是不同的-但如何将该散列转换为十六进制颜色数字? 最佳答案 你可以只取几位前几位:require'digest/md5'color=Digest::MD5.hexdigest('Mytext')[0..5] 关于ruby-如何使用Ruby基于字母数字字符串生成颜色?,我们在StackOverflow上找到一个类似的问题:
深度学习12.CNN经典网络VGG16一、简介1.VGG来源2.VGG分类3.不同模型的参数数量4.3x3卷积核的好处5.关于学习率调度6.批归一化二、VGG16层分析1.层划分2.参数展开过程图解3.参数传递示例4.VGG16各层参数数量三、代码分析1.VGG16模型定义2.训练3.测试一、简介1.VGG来源VGG(VisualGeometryGroup)是一个视觉几何组在2014年提出的深度卷积神经网络架构。VGG在2014年ImageNet图像分类竞赛亚军,定位竞赛冠军;VGG网络采用连续的小卷积核(3x3)和池化层构建深度神经网络,网络深度可以达到16层或19层,其中VGG16和VGG
文章目录1.自动驾驶实战:基于Paddle3D的点云障碍物检测1.1环境信息1.2准备点云数据1.3安装Paddle3D1.4模型训练1.5模型评估1.6模型导出1.7模型部署效果附录show_lidar_pred_on_image.py1.自动驾驶实战:基于Paddle3D的点云障碍物检测项目地址——自动驾驶实战:基于Paddle3D的点云障碍物检测课程地址——自动驾驶感知系统揭秘1.1环境信息硬件信息CPU:2核AI加速卡:v100总显存:16GB总内存:16GB总硬盘:100GB环境配置Python:3.7.4框架信息框架版本:PaddlePaddle2.4.0(项目默认框架版本为2.3