目录
三、电机驱动部分
总结
推荐STM32学习课程:
STM32F103C8T6延时函数和OLED显示屏代码_HX091624的博客-CSDN博客
电机编码器是安装在电机上的旋转编码器,它通过跟踪电机轴的速度和/或位置来提供闭环反馈信号。监视的参数由应用的类型确定,可以包括速度,距离,RPM,位置等。利用编码器或其他传感器控制的特定参数的应用称为闭环反馈或闭环控制系统
#include "stm32f10x.h" // Device header
//定时中断->1s
void Timer_Init(void)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
TIM_InternalClockConfig(TIM2);
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInitStructure.TIM_Period = 10000 - 1;
TIM_TimeBaseInitStructure.TIM_Prescaler = 7200 - 1;
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure);
TIM_ClearFlag(TIM2, TIM_FLAG_Update);
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStructure);
TIM_Cmd(TIM2, ENABLE);
}
/*
void TIM2_IRQHandler(void)
{
if (TIM_GetITStatus(TIM2, TIM_IT_Update) == SET)
{
TIM_ClearITPendingBit(TIM2, TIM_IT_Update);
}
}
*/
#include "stm32f10x.h"
void Key_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1 | GPIO_Pin_11;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
}
uint8_t Key_GetNum(void)
{
uint8_t KeyNum = 0;
if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0)
{
Delay_ms(20);
while (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0);
Delay_ms(20);
KeyNum = 1;
}
return KeyNum;
}
#include "stm32f10x.h"
//定时器3->PWM调速 周期20MS 计一个数->1US
void PWM_Init(void)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
//电动机PWM输出 PA6 PA7
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
//舵机PWM输出 PB0
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
TIM_InternalClockConfig(TIM3);
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInitStructure.TIM_Period = 20000 - 1; //ARR
TIM_TimeBaseInitStructure.TIM_Prescaler = 72 - 1; //PSC
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStructure);
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_OCStructInit(&TIM_OCInitStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = 0; //CCR
TIM_OC1Init(TIM3, &TIM_OCInitStructure); //PWM输出引脚
TIM_OC2Init(TIM3, &TIM_OCInitStructure);
TIM_OC3Init(TIM3, &TIM_OCInitStructure);
TIM_Cmd(TIM3, ENABLE);
}
//左右电机输出比较
void PWM_SetCompare1(uint16_t Compare)
{
TIM_SetCompare1(TIM3, Compare);
}
void PWM_SetCompare2(uint16_t Compare)
{
TIM_SetCompare2(TIM3, Compare);
}
//舵机输出比较
void PWM_SetCompare3(uint16_t Compare)
{
TIM_SetCompare3(TIM3, Compare);
}
电机:电机如何驱动在我之前的文章有写,这里就不再解释了。


#include "stm32f10x.h"
#include "PWM.h"
//左右电机初始化
void Motor_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
//电机控制模拟输入端
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
//控制左电机->PA0 PA1 控制右电机->PA4 PA5
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1|GPIO_Pin_4 | GPIO_Pin_5;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
PWM_Init();
}
//右边电机向前
void Right_moto_go(void)
{
//正转
GPIO_SetBits(GPIOA, GPIO_Pin_4);
GPIO_ResetBits(GPIOA, GPIO_Pin_5);
}
//右边电机向后
void Right_moto_back(void)
{
//反转
GPIO_ResetBits(GPIOA, GPIO_Pin_4);
GPIO_SetBits(GPIOA, GPIO_Pin_5);
}
//右边电机停止
void Right_moto_Stop(void)
{
//停车
GPIO_ResetBits(GPIOA, GPIO_Pin_4);
GPIO_ResetBits(GPIOA, GPIO_Pin_5);
}
//左边电机向前
void Left_moto_go(void)
{
//正转
GPIO_SetBits(GPIOA, GPIO_Pin_0);
GPIO_ResetBits(GPIOA, GPIO_Pin_1);
}
//左边电机向后
void Left_moto_back(void)
{
//反转
GPIO_ResetBits(GPIOA, GPIO_Pin_0);
GPIO_SetBits(GPIOA, GPIO_Pin_1);
}
//左边电机停止
void Left_moto_Stop(void)
{
//停车
GPIO_ResetBits(GPIOA, GPIO_Pin_0);
GPIO_ResetBits(GPIOA, GPIO_Pin_1);
}
#include "stm32f10x.h"
#include "Motor.h"
#include "PWM.h"
//小车调速函数
void Speed_Control(uint16_t Compare)
{
Compare*=200; //100->20000
PWM_SetCompare1(Compare); //调速
PWM_SetCompare2(Compare);
}
//小车前进函数
void run(uint16_t Compare)
{
Speed_Control(Compare);
Left_moto_go(); //左电机往前
Right_moto_go(); //右电机往前
}
//小车后退函数
void backrun(uint16_t Compare)
{
Speed_Control(Compare);
Left_moto_back(); //左电机往后
Right_moto_back(); //右电机往后
}
//小车停车函数
void stop(void)
{
Left_moto_Stop(); //左电机停止
Right_moto_Stop(); //右电机停止
}
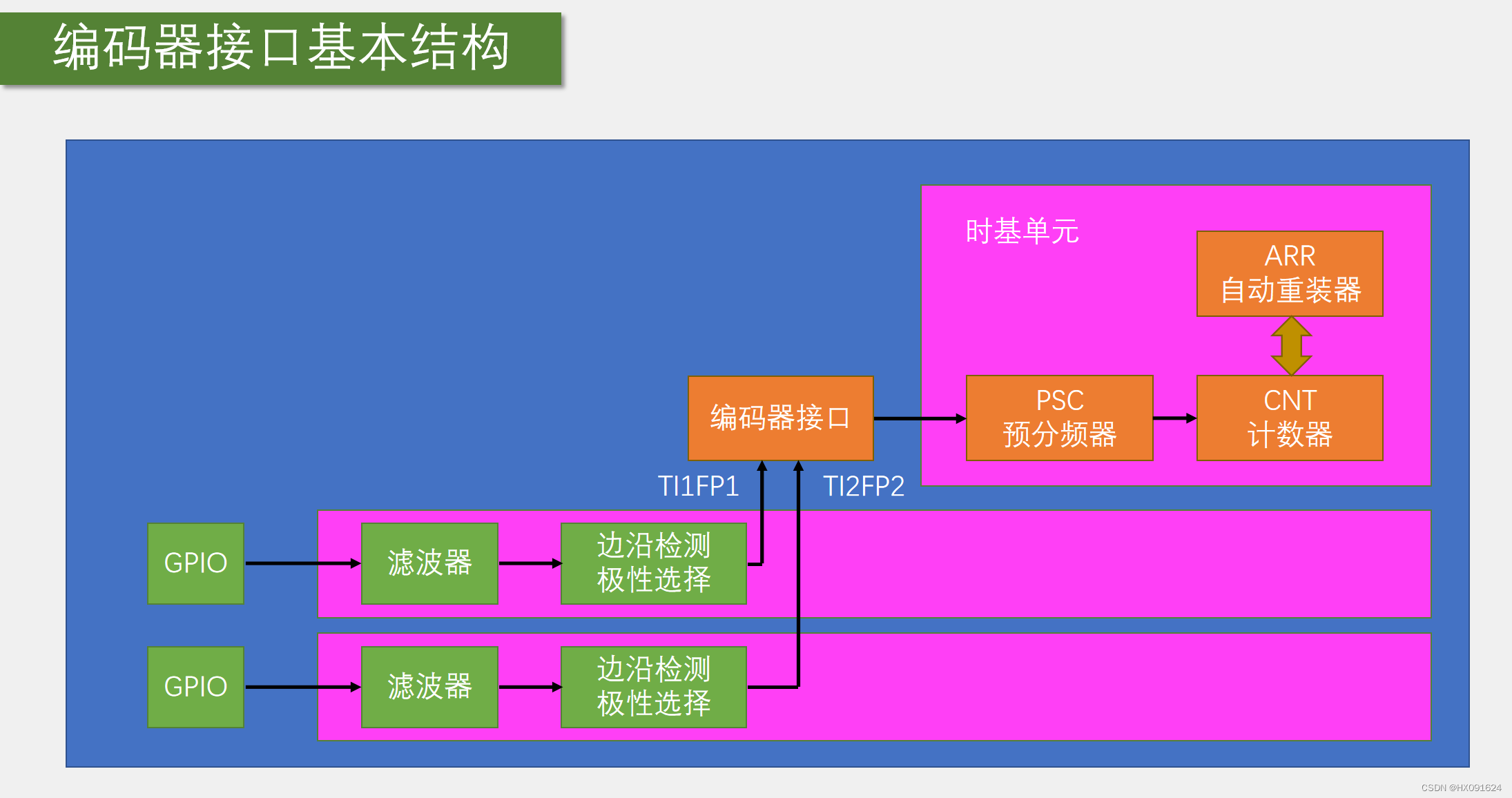
编码器接口可接收增量(正交)编码器的信号,根据编码器旋转产生的正交信号脉冲,自动控制CNT自增或自减,从而指示编码器的位置、旋转方向和旋转速度。
#include "stm32f10x.h" // Device header
//测速
void Encoder_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
//TIM1的CH1和CH2
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8 | GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInitStructure.TIM_Period = 65536 - 1; //ARR
TIM_TimeBaseInitStructure.TIM_Prescaler = 1 - 1; //PSC
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseInitStructure);
//在TI1和TI2上计数
TIM_ICInitTypeDef TIM_ICInitStructure;
TIM_ICStructInit(&TIM_ICInitStructure);
TIM_ICInitStructure.TIM_Channel = TIM_Channel_1;
TIM_ICInitStructure.TIM_ICFilter = 0xF;
TIM_ICInit(TIM1, &TIM_ICInitStructure);
TIM_ICInitStructure.TIM_Channel = TIM_Channel_2;
TIM_ICInitStructure.TIM_ICFilter = 0xF;
TIM_ICInit(TIM1, &TIM_ICInitStructure);
//定时器编码器接口配置 //通道不反相
TIM_EncoderInterfaceConfig(TIM1, TIM_EncoderMode_TI12, TIM_ICPolarity_Rising, TIM_ICPolarity_Rising);
TIM_Cmd(TIM1, ENABLE);
}
int16_t Encoder_Get(void)
{
int16_t Temp;
Temp = TIM_GetCounter(TIM1);
TIM_SetCounter(TIM1, 0);
return Temp;
}
#include "stm32f10x.h"
#include "Key.h"
#include "OLED.h"
#include "Timer.h"
#include "Motor.h"
#include "MotorRun.h"
#include "Encoder.h"
int16_t Speed;
int8_t KeyNum;
int main(void)
{
Key_Init();
OLED_Init();
Timer_Init();
Motor_Init();
Encoder_Init();
OLED_ShowString(1, 1, "Speed:");
while (1)
{
KeyNum=Key_GetNum();
//电机旋转
if(KeyNum==1)
{
run(50);
}
OLED_ShowSignedNum(1, 7, Speed, 5); //显示速度
}
}
void TIM2_IRQHandler(void)
{
if (TIM_GetITStatus(TIM2, TIM_IT_Update) == SET)
{
//每隔一段时间获取速度
Speed = Encoder_Get();
TIM_ClearITPendingBit(TIM2, TIM_IT_Update);
}
}
注意:两个输入引脚借用了输入捕获的通道1和通道2,而接通道3和通道4是没有用的。
以上就是编码器电机的代码,欢迎大家留言评论,遇到问题都可以在评论区留言。
文章目录1.开发板选择*用到的资源2.串口通信(个人理解)3.代码分析(注释比较详细)1.主函数2.串口1配置3.串口2配置以及中断函数4.注意问题5.源码链接1.开发板选择我用的是STM32F103RCT6的板子,不过代码大概在F103系列的板子上都可以运行,我试过在野火103的霸道板上也可以,主要看一下串口对应的引脚一不一样就行了,不一样的就更改一下。*用到的资源keil5软件这里用到了两个串口资源,采集数据一个,串口通信一个,板子对应引脚如下:串口1,TX:PA9,RX:PA10串口2,TX:PA2,RX:PA32.串口通信(个人理解)我就从串口采集传感器数据这个过程说一下我自己的理解,
LL库和HAL库简介LL:Low-Layer,底层库HAL:HardwareAbstractionLayer,硬件抽象层库LL库和hal库对比,很精简,这实际上是一个精简的库。LL库的配置选择如下:在STM32CUBEMX中,点击菜单的“ProjectManager”–>“AdvancedSettings”,在下面的界面中选择“AdvancedSettings”,然后在每个模块后面选择使用的库总结:1、如果使用的MCU是小容量的,那么STM32CubeLL将是最佳选择;2、如果结合可移植性和优化,使用STM32CubeHAL并使用特定的优化实现替换一些调用,可保持最大的可移植性。另外HAL和L
目录一、ESP32简单介绍二、ESP32Wi-Fi模块介绍三、ESP32Wi-Fi编程模型四、ESP32Wi-Fi事件处理流程 五、ESP32Wi-Fi开发环境六、ESP32Wi-Fi具体代码七、ESP32Wi-Fi代码解读6.1主程序app_main7.2自定义代码wifi_init_sta()八、ESP32Wi-Fi连接验证8.1测试方法8.2服务器模拟工具sscom58.3测试代码8.4测试结果前言为了开发一款亚马逊物联网产品,开始入手ESP32模块。为了能够记录自己的学习过程,特记录如下操作过程。一、ESP32简单介绍ESP32是一套Wi-Fi(2.4GHz)和蓝牙(4.2)双模解决方
有道无术,术尚可求,有术无道,止于术。本系列SpringBoot版本3.0.4本系列SpringSecurity版本6.0.2本系列SpringAuthorizationServer版本1.0.2源码地址:https://gitee.com/pearl-organization/study-spring-security-demo文章目录前言1.OAuth2AuthorizationServerMetadataEndpointFilter2.OAuth2AuthorizationEndpointFilter3.OidcProviderConfigurationEndpointFilter4.N
在我的代码中,我需要使用各种算法(包括CRC32)对文件进行哈希处理。因为我还在Digest系列中使用其他加密哈希函数,所以我认为为它们维护一个一致的接口(interface)会很好。为了记录,我确实找到了digest-crc,一颗完全符合我要求的gem。问题是,Zlib是标准库的一部分,并且有一个我想重用的CRC32工作实现。此外,它是用C编写的,因此它应该提供与digest-crc相关的卓越性能,后者是纯ruby实现。实现Digest::CRC32一开始看起来非常简单:%w(digestzlib).each{|f|requiref}classDigest::CRC32一切正常:
我正在尝试在我的机器上安装win32-apigem,但在构建native扩展时我遇到了一些问题:$geminstallwin32-api--no-ri--rdocTemporarilyenhancingPATHtoincludeDevKit...Buildingnativeextensions.Thiscouldtakeawhile...C:\Programs\dev_kit\bin\make.exe:***Couldn'treservespaceforcygwin'sheap,Win32error0ERROR:Errorinstallingwin32-api:ERROR:Failed
我在Windows上运行ruby1.9.2并试图移植在Ruby1.8中工作的代码。该代码使用以前运行良好的Open4.popen4。对于1.9.2,我做了以下事情:通过geminstallPOpen4安装了POpen4需要POpen4通过require'popen4'尝试像这样使用POpen4:Open4.popen4("cmd"){|io_in,io_out,io_er|...}当我这样做时,我得到了错误:nosuchfiletoload--win32/open3如果我尝试安装win32-open3(geminstallwin32-open3),我会收到错误消息:win32-op
DellInspiron5488加内存32G 原装内置内存仅仅8G,目前看,真的太小了! 1.内存型号Dell5488内存型号:DDR42666。笔记本有两个内存插槽,原装占了一个,还能扩展一个。 2.买内存如果买Dell原装笔记本内存,8G就得500块左右。 我咨询了一下,三星的笔记本内存,可以兼容。16G,299块(2023年2月23日,京东价) Dell5488内存组合,最多只能插两根16G内存。 我于是买了两根三星16G内存。装上,很爽😄 跑国产系统统信UOS,再也看不到用交换区了,32G内存,爽!
本文代码使用HAL库。文章目录前言一、MCP4017的重要特性二、MCP4017计算RBW阻值三、MCP4017地址四、MCP4017读写函数五、CubeMX创建工程(利用ADC测量MCP4017电压)、对应代码:总结前言一、MCP4017的重要特性蓝桥杯板子上的是MCP4017T-104ELT,如图1。MCP4017是一个可编程电阻,通过写入的数值可以改变电阻的大小。重点在于6引脚(W),5引脚(B&#
STM32OTA应用开发——通过USB实现OTA升级目录STM32OTA应用开发——通过USB实现OTA升级前言1环境搭建2功能描述3BootLoader的制作4APP的制作5烧录下载配置6运行测试结束语前言什么是OTA?百度百科:空中下载技术(Over-the-AirTechnology;OTA),是通过移动通信的空中接口实现对移动终端设备及SIM卡数据进行远程管理的技术。经过公网多年的应用与发展,已十分成熟,网络运营商通过OTA技术实现SIM卡远程管理,还能提供移动化的新业务下载功能。实际上,现在我们所说的OTA比百度百科的定义还要更广泛,OTA的形式已经不再局限于手机和SIM卡,只要涉及
 https://www.bilibili.com/video/BV1th411z7sn/?p=20&spm_id_from=pageDriver&vd_source=ed36b2700bbc2bac7746c270bc391540
https://www.bilibili.com/video/BV1th411z7sn/?p=20&spm_id_from=pageDriver&vd_source=ed36b2700bbc2bac7746c270bc391540