机器人与视觉标定理论详解
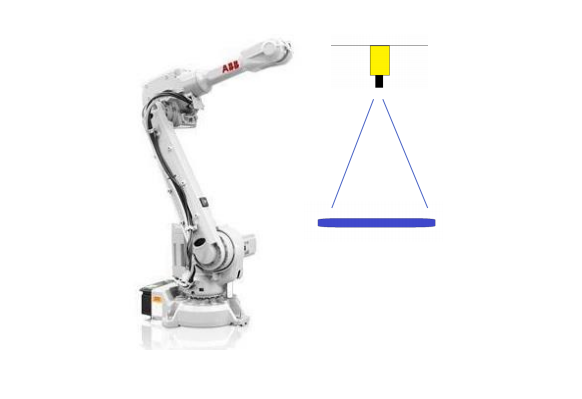
1.相机非线性校正
使用标定板做非线性校正
2.相机与机器人做9点标定
可以使用机器人扎9个点,或者机器人抓住工件摆放9个位置,得到9个机械坐标,相机也得到9个像素坐标,然后标定
3.计算机器人的旋转中心
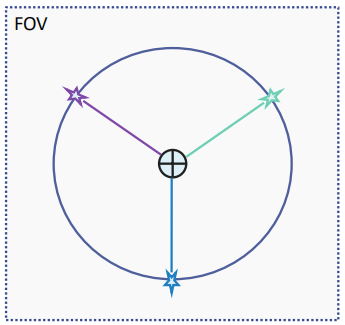
机器人抓取工件分别旋转三个角度摆放到相机视野内,相机可以得到三个坐标值,通过三个坐标值拟合圆获得圆心坐标即为旋转中心
4.相机通过公式计算得出最终的输出结果
(rx0, ry0)为旋转中心,( x, y)为被旋转的点,(x0,y0)旋转后的点
x0= cos (a) * (x-rx0) – sin (a) * (y-ry0) +rx0
y0= cos (a) * (y-ry0) + sin (a) * (x-rx0) +ry0
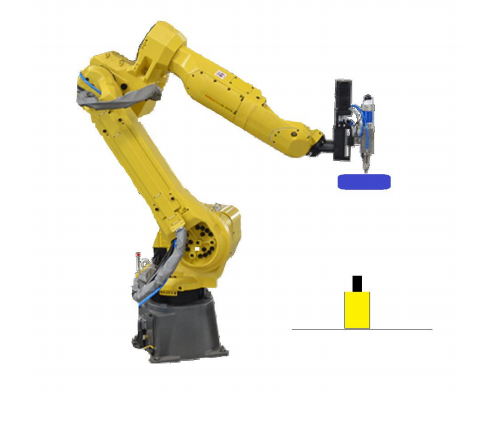
1.相机非线性校正
使用机器人吸起标定板做非线性校正
2.相机与机器人做9点标定
可以使用实物标定,机器人抓住工件摆放9个位置,得到9个机械坐标,相机也得到9个像素坐标,然后标定。
参考上面的上往下看。
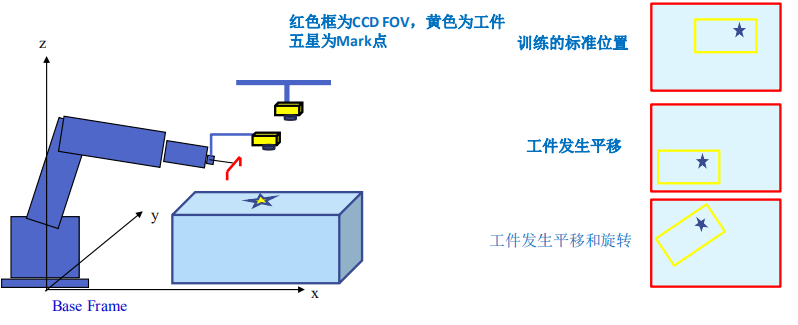
1、相机非线性矫正
2、相机与机器人做9点标定
可以使用实物标定,机器人抓住工件摆放9个位置,得到9个机械坐标,相机也得到9个像素坐标,(机器人每次需要回到固定位置拍照),然后标定
3、计算机器人的旋转中心
机器人抓取工件分别旋转三个角度摆放到相机视野内,相机可以得到三个坐标值,通过三个坐标值拟合圆获得圆心坐标即为旋转中心
4、相机通过公式计算得出最终输出结果

1、相机非线性矫正
2、相机与机器人做9点标定
3、计算机器人的旋转中心
4、相机通过公式计算得出最终输出结果
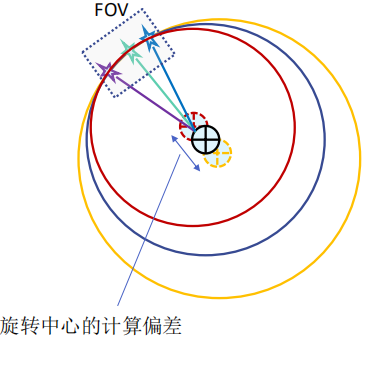
注:由于选择中心距离视野很远,通常拟合出来的旋转中心存在比较大的误差,给定位精度造成影响。
分离轴的设计方式有很多,XY + θ, X+Y θ, X θ+Y….,具体状况具体分析,目的是要找到旋转中心,做好9点标定。
1.相机非线性校正
2.相机与机器人做9点标定
3.计算机器人的旋转中心
4.相机通过公式计算得出最终的输出结果
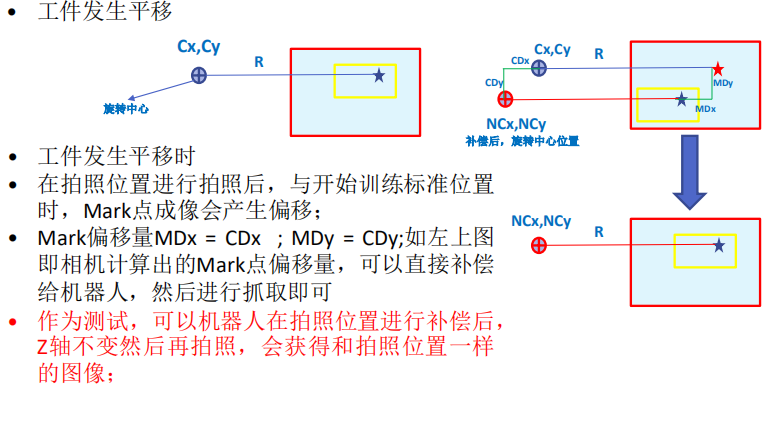
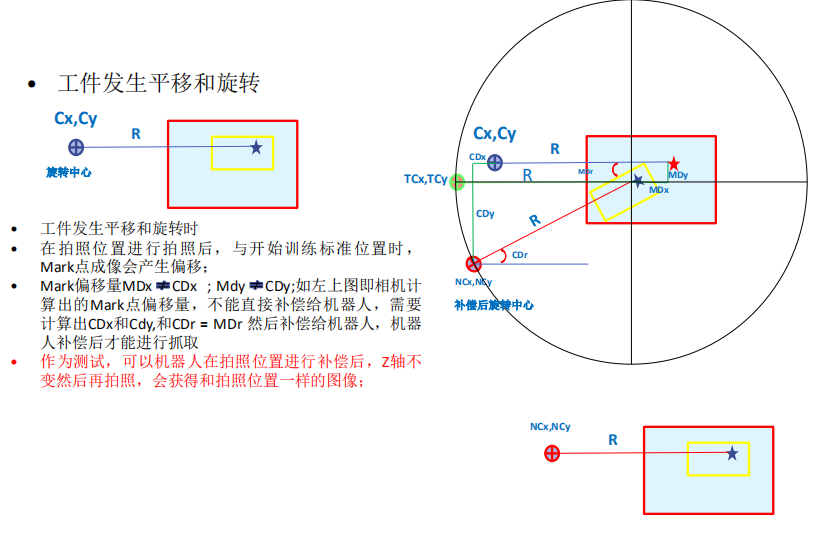
旋转中心方法用于所有机器人与视觉配合场景
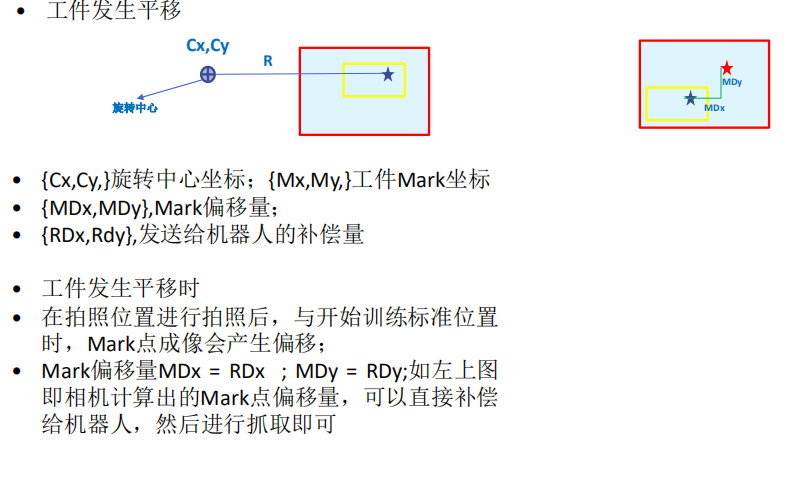
方法:计算工件实际发生的偏移量和旋转量,结合机器人的旋转中心进行二次补偿后,把补偿量
发送给机器人,然后机器人把补偿量补偿后进行抓取或放置即可;
计算某个点绕另外一点旋转一定角度后的坐标,如图:

机器人与视觉标定理论详解
A(x,y)绕B(rx0,ry0)旋转a度后的位置为C(x0,y0),则有如下关系式:
x0= cos (a) * (x-rx0) – sin (a) * (y-ry0) +rx0
y0= cos (a) * (y-ry0) + sin (a) * (x-rx0) +ry0
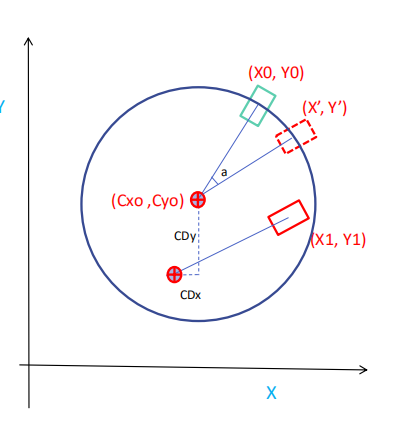
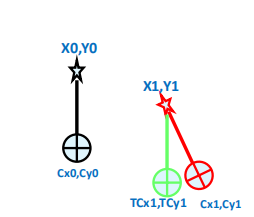
CDx= cos (a) * (Cx0-X0) – sin (a) * (Cy0-Y0) + X1 – Cx0
CDy= cos (a) * (Cy0-Y0) + sin (a) * (Cx0-X0) + Y1 – Cy0
X’= cos (a) * (X0-Cx0) – sin (a) * (Y0-Cy0) + Cx0
Y’= cos (a) * (Y0-Cy0) – sin (a) * (X0-Cx0) + Cy0
CDx=X1-X’
Cdy=Y1-Y’
这里是机器人在取料之前,先把自己的角度补正到与 物料当前角度一致,到(X’,Y’)位置处,然后移动 CDx,Cdy,与物料位置也重合,然后去取料。这样就保证了每次取料后,物料相对于机器人的位置 一致,因此直接往目标位置放就可以。这种方式由于是取物料的时候调整位置,因此适用于 相机固定在机械手上、相机固定安装从上往下看的方式。如果相机固定安装从下往上看,由于机器人这时候已经取完料了,就不适合使用了。
这里计算到的Cdx和Cdy一定要补偿到机器人的取料位置里,不能补偿到 放料位置。旋转中心方法计算到的偏差可以直接补偿到放料位置。原因如下:
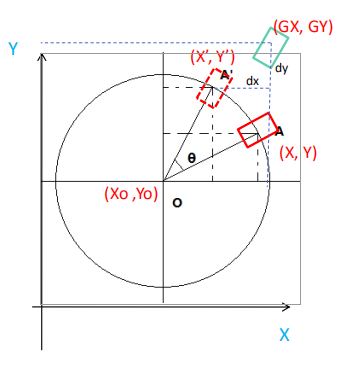
(X,Y)是定位到的产品位置,(GX,GY)是标准模板位置,(X’,Y’)是补偿了角度后的新位置,则:
X’ = cos θ * (X-Xo) – sin θ *(Y-Yo) + Xo;
Y’ = cos θ* (Y-Yo) + sin θ* (X-Xo) + Yo;
Offset X=X’-GX
Offset Y=Y’-GY
Offset Theta= θ
当相机FOV与旋转中心很近,可以用旋转3点以上拟合一个圆求圆心
当相机FOV与旋转中心很远,使用旋转3或多个点求圆心,准确性会很差。
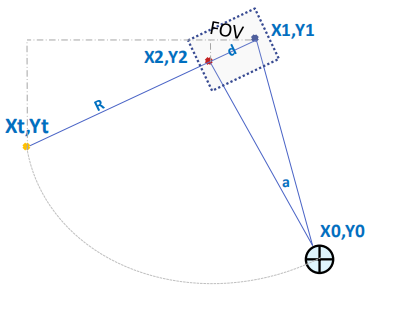
(X0,Y0)为旋转中心, (X1,Y1)及(X2,Y2)为工件在视野中旋转角度a的前后坐标,(Xt,Yt)为两点连线的延长。
d = √(X2-X1)^2 + (Y2-Y1)^2
角度a
R = d/2/sin(a/2)
R/d = (Xt-X1)/(X2-X1)
R/d = (Yt-Y1)/(Y2-Y1)
Xt = (1-R/d)*X1 + (R/d)*X2
Yt = (1-R/d)*Y1 + (R/d)*Y2
X0= cos (90-a/2) * (Xt-X1) – sin (90-a/2) * (Yt-Y1) +X1
Y0= cos (90-a/2) * (Yt-Y1) + sin (90-a/2) * (Xt-X1) +Y1
角度:X+ Y+ 为正,反之为负
机器人与视觉标定理论详解
CDx= cos (a) * (Cx0-X0) – sin (a) * (Cy0-Y0) + X1 – Cx0
= (cos (a) -1) * (Cx0-X0) – sin (a) * (Cy0-Y0) + MDx
= (cos (a) -1) * StDx- sin (a) * StDy+ MDx
CDy= cos (a) * (Cy0-Y0) + sin (a) * (Cx0-X0) + Y1 – Cy0
= (cos (a) -1) * (Cy0-Y0) + sin (a) * (Cx0-X0) + Mdy
= (cos (a) -1) * StDy + sin (a) * StDx + Mdy
从公式中可以看出StDx = Cx0-X0,StDy = Cy0-Y0是个常量,MDx和Mdy是每次拍照是工件(Mark)的坐标与标准位置工件(Mark)的差值;
StDx与StDy怎么计算呢?蓝色的为一个二元一次方程,我们需要旋转一个角度即可计算出;
如果计算出StDx和StDy则在运行时,直接带入上述公式,可以很快计算出CDx,Cdy这样给出Robot的偏移量了,而不需要计算旋转中心的确切坐标了;
StDx,StDy计算过程,首先Robot在拍照点旋转一定角度a(一定是Robot给出)
机器人与视觉标定理论详解
CDx= cos (a) * (Cx0-X0) – sin (a) * (Cy0-Y0) + X1 – Cx0
= (cos (a) -1) * (Cx0-X0) – sin (a) * (Cy0-Y0) + MDx
= (cos (a) -1) * StDx- sin (a) * StDy+ MDx
CDy= cos (a) * (Cy0-Y0) + sin (a) * (Cx0-X0) + Y1 – Cy0
= (cos (a) -1) * (Cy0-Y0) + sin (a) * (Cx0-X0) + Mdy
= (cos (a) -1) * StDy + sin (a) * StDx + Mdy
下面介绍如何求解StDx和StDy,旋转一定角度a后MDx和Mdy则为确定值,cos(a)和sin(a)为确定值
0= (cos (a) -1) * StDx- sin (a) * StDy+ MDx
0= (cos (a) -1) * StDy + sin (a) * StDx + Mdy
StDx = -0.5*(Mdx*(cos(a)-1)+Mdy*sin(a)) / (1-cos(a))
StDy = 0.5*(Mdx*sin(a)-Mdy*(cos(a)-1))/(1-cos(a))
a是旋转标准的角度
Mdx=X1-X0,即旋转后Mark坐标与训练模板的mark坐标
声明:部分内容来源于网络,仅供读者学术交流之目的。文章版权归原作者所有。如有不妥,请联系。
这似乎非常适得其反,因为太多的gem会在window上破裂。我一直在处理很多mysql和ruby-mysqlgem问题(gem本身发生段错误,一个名为UnixSocket的类显然在Windows机器上不能正常工作,等等)。我只是在浪费时间吗?我应该转向不同的脚本语言吗? 最佳答案 我在Windows上使用Ruby的经验很少,但是当我开始使用Ruby时,我是在Windows上,我的总体印象是它不是Windows原生系统。因此,在主要使用Windows多年之后,开始使用Ruby促使我切换回原来的系统Unix,这次是Linux。Rub
require"socket"server="irc.rizon.net"port="6667"nick="RubyIRCBot"channel="#0x40"s=TCPSocket.open(server,port)s.print("USERTesting",0)s.print("NICK#{nick}",0)s.print("JOIN#{channel}",0)这个IRC机器人没有连接到IRC服务器,我做错了什么? 最佳答案 失败并显示此消息::irc.shakeababy.net461*USER:Notenoughparame
文章目录1、自相关函数ACF2、偏自相关函数PACF3、ARIMA(p,d,q)的阶数判断4、代码实现1、引入所需依赖2、数据读取与处理3、一阶差分与绘图4、ACF5、PACF1、自相关函数ACF自相关函数反映了同一序列在不同时序的取值之间的相关性。公式:ACF(k)=ρk=Cov(yt,yt−k)Var(yt)ACF(k)=\rho_{k}=\frac{Cov(y_{t},y_{t-k})}{Var(y_{t})}ACF(k)=ρk=Var(yt)Cov(yt,yt−k)其中分子用于求协方差矩阵,分母用于计算样本方差。求出的ACF值为[-1,1]。但对于一个平稳的AR模型,求出其滞
目录0专栏介绍1平面2R机器人概述2运动学建模2.1正运动学模型2.2逆运动学模型2.3机器人运动学仿真3动力学建模3.1计算动能3.2势能计算与动力学方程3.3动力学仿真0专栏介绍?附C++/Python/Matlab全套代码?课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索、采样法、智能算法等);局部规划(DWA、APF等);曲线优化(贝塞尔曲线、B样条曲线等)。?详情:图解自动驾驶中的运动规划(MotionPlanning),附几十种规划算法1平面2R机器人概述如图1所示为本文的研究本体——平面2R机器人。对参数进行如下定义:机器人广义坐标
一、什么是MQTT协议MessageQueuingTelemetryTransport:消息队列遥测传输协议。是一种基于客户端-服务端的发布/订阅模式。与HTTP一样,基于TCP/IP协议之上的通讯协议,提供有序、无损、双向连接,由IBM(蓝色巨人)发布。原理:(1)MQTT协议身份和消息格式有三种身份:发布者(Publish)、代理(Broker)(服务器)、订阅者(Subscribe)。其中,消息的发布者和订阅者都是客户端,消息代理是服务器,消息发布者可以同时是订阅者。MQTT传输的消息分为:主题(Topic)和负载(payload)两部分Topic,可以理解为消息的类型,订阅者订阅(Su
TCL脚本语言简介•TCL(ToolCommandLanguage)是一种解释执行的脚本语言(ScriptingLanguage),它提供了通用的编程能力:支持变量、过程和控制结构;同时TCL还拥有一个功能强大的固有的核心命令集。TCL经常被用于快速原型开发,脚本编程,GUI和测试等方面。•实际上包含了两个部分:一个语言和一个库。首先,Tcl是一种简单的脚本语言,主要使用于发布命令给一些互交程序如文本编辑器、调试器和shell。由于TCL的解释器是用C\C++语言的过程库实现的,因此在某种意义上我们又可以把TCL看作C库,这个库中有丰富的用于扩展TCL命令的C\C++过程和函数,所以,Tcl是
2022年底,OpenAI的预训练模型ChatGPT给人工智能领域的爱好者和研究人员留下了深刻的印象和启发,他展现的惊人能力将人工智能的研究和应用热度推向高潮,网上也充斥着和ChatGPT的各种聊天,他可以作诗、写小说、写代码、讨论疫情问题等。下面就是一些他的神回复:人命关天的坑: 写歌,留给词作者的机会不多了。。。 回答人类怎么样面对人工智能: 什么是ChatGPT?借用网上的一段介绍,ChatGPT是由人工智能研究实验室OpenAI在2022年11月30日发布的全新聊天机器人模型,一款人工智能技术驱动的自然语言处理工具。它能够通过学习和理解人类的语言来进行对话,还能根据聊天的上下文进行互动
我正在为在AmazonEC2实例上运行的应用程序设计一个AutoScaling系统。应用程序从SQS读取消息并对其进行处理。AutoScaling系统将监控两件事:SQS中的消息数量,所有EC2机器上运行的进程总数。例如,如果SQS中的消息数量超过3000,我希望系统自动缩放,创建一个新的EC2实例,在其上部署代码,当消息数量低于2000时,我希望系统终止EC2实例.我正在用Ruby和Capistrano做这件事。我的问题是:我无法找到一种方法来确定在所有EC2机器上运行的进程数并将该数字保存在变量中。你能帮帮我吗? 最佳答案 您可
开门见山|拉取镜像dockerpullelasticsearch:7.16.1|配置存放的目录#存放配置文件的文件夹mkdir-p/opt/docker/elasticsearch/node-1/config#存放数据的文件夹mkdir-p/opt/docker/elasticsearch/node-1/data#存放运行日志的文件夹mkdir-p/opt/docker/elasticsearch/node-1/log#存放IK分词插件的文件夹mkdir-p/opt/docker/elasticsearch/node-1/plugins若你使用了moba,直接右键新建即可如上图所示依次类推创建
文章目录概念索引相关操作创建索引更新副本查看索引删除索引索引的打开与关闭收缩索引索引别名查询索引别名文档相关操作新建文档查询文档更新文档删除文档映射相关操作查询文档映射创建静态映射创建索引并添加映射概念es中有三个概念要清楚,分别为索引、映射和文档(不用死记硬背,大概有个印象就可以)索引可理解为MySQL数据库;映射可理解为MySQL的表结构;文档可理解为MySQL表中的每行数据静态映射和动态映射上面已经介绍了,映射可理解为MySQL的表结构,在MySQL中,向表中插入数据是需要先创建表结构的;但在es中不必这样,可以直接插入文档,es可以根据插入的文档(数据),动态的创建映射(表结构),这就