ESPRIT是借助旋转不变技术估计信号参数(estimating signal parameter via rotational invariance techniques)方法的英文缩写,最早由Roy等人[233]于1986年提出。ESPRIT方法现已成为现代信号处理中一种代表性方法,并得到了广泛的应用。
和MUSIC方法存在阵元空间和波束空间两类算法一样,ESPRIT方法也有阵元空间E-SPRIT算法和波束空间ESPRIT算法两种类型,并且还有专门针对复观测数据的酉ESPRIT方法。
算法一、基本ESPRIT算法步骤
步骤1、利用已知的观测数据x(1),.....,x(N)估计自协方差函数.
步骤2、由估计的自协方差函数构造MxM自协方差矩阵Rxx和MxM互协方差Rxy。
步骤3、求Rxx的特征值分解。对于M>p,最小特征值的平均值作为噪声方差的估计。
步骤4、利用计算Cxx=Rxx-
I和Cxy=Rxy-
Z。
步骤5、求矩阵束{Cxx,Cxy}的广义特征值分解,得到位于单位圆上的p个广义特征值,它们直接给出谐波频率wi的估计。然后,利用
估计波
达方向θ1,…,θp。
Roy和Kailath指出[232],最小二乘算子会导致在求解广义特征值问题的某些潜在的数值困难。现在已广泛认识到,奇异值分解(SVD)和总体最小二乘(TLS)的应用可以将一个较大维数(MxM)病态广义特征问题转化为一个较小维数(p×p)的无病态广义特征问题。
算法二、TLS-ESPRIT算法步骤
TLS-ESPRIT算法matlab仿真实验
TLS-ESPRIT函数程序如下:
function estimate = tls_esprit(dd,cr,Le)
twpi =2.0*pi;
derad = pi / 180.0;
radeg = 180.0 / pi;
%对接收信号协方差矩阵进行特征值分解
[K,KK] = size(cr);
[V,D]=eig(cr);
EVA = real(diag(D)');
[EVA,I] = sort(EVA);
EVA=fliplr(EVA);
EV=fliplr(V(:,I));
%构造E_{xy}和E_xys=E_{xy}HE_{xy}
Exy =[EV(1:K-1,1:Le) EV(2:K,1:Le)];
E_xys = Exy'*Exy;
%对E_xys进行特征值分解
[V,D]=eig(E_xys);
EVA_xys=real(diag(D)');
[EVA_xys,I] =sort(EVA_xys);
EVA_xys=fliplr(EVA_xys);
EV_xys=fliplr(V(:,I));
%将EV_xys分解
Gx = EV_xys(1:Le,Le+1:Le*2);
Gy=EV_xys(Le+1:Le*2,Le+1:Le*2);
%计算Psi=-Gx[Gy]{-1}
Psi = -Gx/Gy;
%对Psi进行特征值分解
[V,D]=eig(Psi);
EGS = diag(D).';
[EGS,I] = sort(EGS);
EGS=fliplr(EGS);
EVS=fliplr(V(:,I));
%估计DOA
ephi = atan2(imag(EGS), real(EGS));
ange = -asin( ephi / twpi / dd ) * radeg;
estimate(1,:)=ange;
%功率估计
T=inv(EVS);
powe = T*diag(EVA(1:Le)-EVA(K))*T';
powe = abs(diag(powe).')/K;
estimate(2,:)=powe;
主函数程序如下:
clear all
close all
derad = pi/180; %角度->弧度
radeg = 180/pi; %弧度->角度
twpi=2*pi;
kelm = 8; %阵元数
dd=0.5; %阵元间距
d=0:dd:(kelm-1)*dd;
iwave = 3; %信源数
theta =[10 20 30]; %波达方向
snr = 10; %信噪比
n=500; %采样数(快拍)
A=exp(-1i*twpi*d.'*sin(theta*derad)); %方向矢量
S=randn(iwave,n ); %信源信号
snr0=0:3:100 ; %信噪比
for isnr=1:10
X0=A*S; %接收信号
X=awgn(X0,snr0(isnr),'measured') ; %添加噪声
Rxx=X*X'/n; %计算协方差矩阵
[EV,D]=eig(Rxx); %特征值分解
EVA=diag(D)';
[EVA,I]=sort(EVA); %特征值从小到大排序
EVA=fliplr(EVA); %左右翻转,从大到小排序
EV=fliplr(EV(:,I)); %对应特征矢量排序
estimates=(tls_esprit(dd,Rxx,iwave)); %调用子程序
doaes(isnr,:)=sort(estimates(1,:));
end
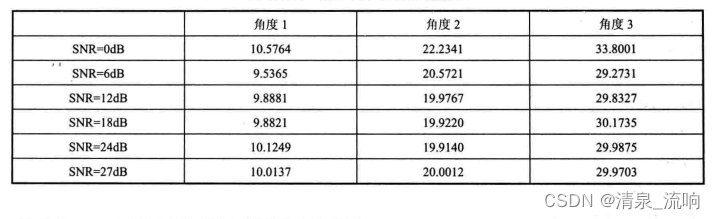
disp(doaes);运行结果如下:
参考文献:
阵列信号处理及MATLAB实现;张小飞,陈华伟,仇小锋(编著)
现代信号处理(第三版);张贤达(编著)
Rackup通过Rack的默认处理程序成功运行任何Rack应用程序。例如:classRackAppdefcall(environment)['200',{'Content-Type'=>'text/html'},["Helloworld"]]endendrunRackApp.new但是当最后一行更改为使用Rack的内置CGI处理程序时,rackup给出“NoMethodErrorat/undefinedmethod`call'fornil:NilClass”:Rack::Handler::CGI.runRackApp.newRack的其他内置处理程序也提出了同样的反对意见。例如Rack
点向量坐标矩阵的几何意义介绍旋转矩阵的几何含义之前,先介绍一下点向量坐标矩阵的几何含义点:在一维空间下就是一个标量,如同一条直线上,以任意某一个位置为0点,以一定的尺度间隔为1,2,3...,相反方向为-1,-2,-3...;如此就形成了一维坐标系,这时候任何一个点都可以用一个数值表示,如点p1=5,即即从原点出发沿着x轴正方向移动5个尺度;点p2=-3,负方向移动3个尺度; 在一维坐标系上过原点做垂直于一维坐标系的直线,则形成了二维坐标系,此时描述一个点需要两个数值来表示点p3=(3,2),即从原点出发沿着x轴正方向移动3个尺度,在此基础上沿着y轴正方向移动两个尺度的位置就是点p3。
?博客主页:https://xiaoy.blog.csdn.net?本文由呆呆敲代码的小Y原创,首发于CSDN??学习专栏推荐:Unity系统学习专栏?游戏制作专栏推荐:游戏制作?Unity实战100例专栏推荐:Unity实战100例教程?欢迎点赞?收藏⭐留言?如有错误敬请指正!?未来很长,值得我们全力奔赴更美好的生活✨------------------❤️分割线❤️-------------------------
Unity自动旋转动画1.开门需要门把手先动,门再动2.关门需要门先动,门把手再动3.中途播放过程中不可以再次进行操作觉得太复杂?查看我的文章开关门简易进阶版效果:如果这个门可以直接打开的话,就不需要放置"门把手"如果门把手还有钥匙需要旋转,那就可以把钥匙放在门把手的"门把手",理论上是可以无限套娃的可调整参数有:角度,反向,轴向,速度运行时点击Test进行测试自己写的代码比较垃圾,命名与结构比较拉,高手轻点喷,新手有类似的需求可以拿去做参考上代码usingSystem.Collections;usingSystem.Collections.Generic;usingUnityEngine;u
MIMO技术的优缺点优点通过下面三个增益来总体概括:阵列增益。阵列增益是指由于接收机通过对接收信号的相干合并而活得的平均SNR的提高。在发射机不知道信道信息的情况下,MIMO系统可以获得的阵列增益与接收天线数成正比复用增益。在采用空间复用方案的MIMO系统中,可以获得复用增益,即信道容量成倍增加。信道容量的增加与min(Nt,Nr)成正比分集增益。在采用空间分集方案的MIMO系统中,可以获得分集增益,即可靠性性能的改善。分集增益用独立衰落支路数来描述,即分集指数。在使用了空时编码的MIMO系统中,由于接收天线或发射天线之间的间距较远,可认为它们各自的大尺度衰落是相互独立的,因此分布式MIMO
我对图像处理完全陌生。我对JPEG内部是什么以及它是如何工作一无所知。我想知道,是否可以在某处找到执行以下简单操作的ruby代码:打开jpeg文件。遍历每个像素并将其颜色设置为fx绿色。将结果写入另一个文件。我对如何使用ruby-vips库实现这一点特别感兴趣https://github.com/ender672/ruby-vips我的目标-学习如何使用ruby-vips执行基本的图像处理操作(Gamma校正、亮度、色调……)任何指向比“helloworld”更复杂的工作示例的链接——比如ruby-vips的github页面上的链接,我们将不胜感激!如果有ruby-
我有一个super简单的脚本,它几乎包含了FayeWebSocketGitHub页面上用于处理关闭连接的内容:ws=Faye::WebSocket::Client.new(url,nil,:headers=>headers)ws.on:opendo|event|p[:open]#sendpingcommand#sendtestcommand#ws.send({command:'test'}.to_json)endws.on:messagedo|event|#hereistheentrypointfordatacomingfromtheserver.pJSON.parse(event.d
我正在尝试解析网页,但有时会收到404错误。这是我用来获取网页的代码:result=Net::HTTP::getURI.parse(URI.escape(url))如何测试result是否为404错误代码? 最佳答案 像这样重写你的代码:uri=URI.parse(url)result=Net::HTTP.start(uri.host,uri.port){|http|http.get(uri.path)}putsresult.codeputsresult.body这将打印状态码和正文。
我刚刚看到whitehouse.gov正在使用drupal作为CMS和门户技术。drupal的优点之一似乎是很容易添加插件,而且编程最少,即重新发明轮子最少。这实际上正是Ruby-on-Rails的DRY理念。所以:drupal的缺点是什么?Rails或其他基于Ruby的技术有哪些不符合whitehouse.org(或其他CMS门户)门户技术的资格? 最佳答案 Whatarethedrawbacksofdrupal?对于Ruby和Rails,这确实是一个相当主观的问题。Drupal是一个可靠的内容管理选项,非常适合面向社区的站点。它
我查看了Stripedocumentationonerrors,但我仍然无法正确处理/重定向这些错误。基本上无论发生什么,我都希望他们返回到edit操作(通过edit_profile_path)并向他们显示一条消息(无论成功与否)。我在edit操作上有一个表单,它可以POST到update操作。使用有效的信用卡可以正常工作(费用在Stripe仪表板中)。我正在使用Stripe.js。classExtrasController5000,#amountincents:currency=>"usd",:card=>token,:description=>current_user.email)