
n为问题规模,a为递推的子问题数量,n/b为每个子问题的规模,f(n)为递推意以外进行的计算工作。
a≥1,b>1为常数,f(n) 为函数,T(n) 为非负整数。则有以下结果(分类讨论):
1)若  则有
则有

2)若 则有
则有
3)若 且对于某个常数c<1和所有充分大的n有
且对于某个常数c<1和所有充分大的n有
则有

其中,大O代表的是该算法的算法复杂度上限,即该算法在最坏情况之下的复杂度。f(x) = O(g(x))正式的数学定义:存在正常数c,n,n0,当n>n0时,对于任意f(n)符合0<=f(n)<=c*g(n) ,如图:
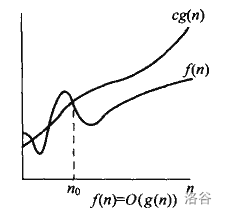
从这张图可以看出,当横坐标的值大于x=n0时,cg(n)的纵值总大于f(n),这可以理解为f(x)以g(n)为上界。
大omega则是代表该算法的算法复杂度下限,即该算法在最优情况之下的复杂度。 f(n)= Ω(g(n)) 正式的数学定义:存在正常数c、n、n0,当 n > n0 的时,任意的 f(n) 符合 0 <= c*g(n) <= f(n)。如图:
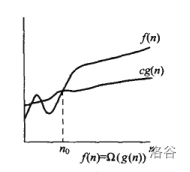
同理,我们可以从图中看出,在n0之后cg(n)总比f(n)小,因此可以理解为f(x)以g(n)为下界。
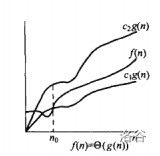
大theta是算法复杂度的确界,他既描述了上界,又描述了下界。
f(n)= θ(cg(n)) 正式的数学定义:存在正常数c1、c2、n、n0,当 n > n0 的时,对于任意的f(n)对符合 c1g(n) <= f(n) <= c2g(n),c1g(n)、c2*g(n)都是渐进正函数(当n趋于无穷大的时候,f(n)为正)。 如图:
算法导论中还根据大O,大Ω,大θ的定义得到以下定理:
当且仅当函数 f(n) = O(g(n)) 并且 f(n)= Ω(g(n)) 时,才有 f(n) = θ(g(n))。
回到主定理,可以看出,只要求出log以b为底的a的n次方,复杂度就可以很快的算出来,我们把公式用刚介绍的概念翻译一下:
1)若f(n)以log以b为底的a-ε的n次方为上界,则该递推式的算法复杂度的确界为log以b为底的a的n次方
2)若f(n)以log以b为底的a的n次方为确界,则该递推式的算法复杂度的确界为log以b为底的a的n次方乘以logn
3)若f(n)以log以b为底的a+ε的n次方为下界,且n充分大,则该递推式的算法复杂度的确界为f(n)
首先回顾一下拉格朗日定理的内容:函数f(x)是在闭区间[a,b]上连续、开区间(a,b)上可导的函数,那么至少存在一个,使得:通过这个表达式我们可以知道,f(x)是函数的主体,a和b可以看作是主体函数f(x)中所取的两个值。那么可以有, 也就意味着我们可以用来替换 这种替换可以用在求某些多项式差的极限中。方法: 外层函数f(x)是一致的,并且h(x)和g(x)是等价无穷小。此时,利用拉格朗日定理,将原式替换为 ,再进行求解,往往会省去复合函数求极限的很多麻烦。使用要注意:1.要先找到主体函数f(x),即外层函数必须相同。2.f(x)找到后,复合部分是等价无穷小。3.要满足作差的形式。如果是加
[电路]系列文章目录1-发出功率和吸收功率关系2-独立源和受控源3-基尔霍夫定律4-两端电路等效变换、电阻串并联5-电压源、电流源的串联和并联6-电阻的星形连接和角形连接等效变换(星角变换)7-实际电源模型和等效变换8-无源一端口网络输入电阻9-电路的图及相关概念10-支路电流法11-网孔电流法12-回路电流法13-结点电压法14-叠加定理和齐性定理15-替代定理16-戴维宁定理和诺顿定理文章目录[电路]系列文章目录一、戴维宁定理1定义2图示说明3说明4例题二、诺顿定理1定义2图示说明3说明三、特殊说明一、戴维宁定理1定义任何一个线性含源一端口网络,对外电路来说,总可以用一个电压源和电阻的串联
回到我用C和C++完成大部分工作的那一天,当然,我会手动申请deMorgan'stheorem优化任何重要的bool表达式。在C#中执行此操作是否有用,或者优化器是否不需要这样做? 最佳答案 在如此快的处理器上,重新排列bool表达式几乎不可能在速度上产生任何实际差异。而且C#编译器非常聪明,它也会优化它。优化可读性和清晰度! 关于c#-在C#中应用DeMorgan定理手动优化条件语句中的bool表达式是否有用(例如if条件),我们在StackOverflow上找到一个类似的问题:
所以,我正在尝试对我的SAT、圆-多边形、多边形-多边形碰撞应用响应。我将本文中的这段代码移植到JavaScript中:http://rocketmandevelopment.com/blog/separation-of-axis-theorem-for-collision-detection/现在,检测适用于所有类型,但响应失败并以疯狂的速度和错误的Angular进行,它不依赖于物体的质量(面积^2而不是质量)并且不应用Angular速度JSFiddle(重力不应用于模拟,用箭头键移动),JS中的第一部分是矢量,然后是物理,然后是主。这是我对形状的定义:(必须为“JSFiddle”链
约定\(A\perpB\)表示\(\gcd(A,B)=1\)。\(A\midB\)表示\(B\equiv0\pmod{A}(A\neq0)\)。引入考虑以下这道题:有物不知其數,三三數之剩二,五五數之剩三,七七數之剩二。問物幾何?——《孫子算經》也就是说,求出下列关于\(x\)方程组的最小整数解:\[\begin{cases}x\equiv2\pmod{3}\\x\equiv3\pmod{5}\\x\equiv2\pmod{7}\end{cases}\]解析首先我们考虑什么时候\(\equiv3\pmod{3}\),什么时候\(\equiv3\pmod{5}\),什么时候\(\equiv2\p
我正在尝试为每个状态分配一种颜色,以便没有两个相邻状态共享相同的颜色(http://en.wikipedia.org/wiki/Four_color_theorem)。该程序将输出每个状态及其颜色。我正在读取具有以下格式的48个状态(2个未连接)的文本文件:al,fl,ms,tn,gaar,la,tx,ok,mo,tn,msaz,ca,nv,ut,nmca,az,nv,orco,wy,ut,nm,ok,ks,ne...示例:阿拉巴马州与佛罗里达州、密西西比州、田纳西州和佐治亚州接壤。阿肯色州与路易斯安那州、德克萨斯州等接壤到目前为止,这是我的代码:MapColor.javaimport
第一部分---子图和补图1.生成子图:点集合不变,边集合是原图的边集合的子集2.导出子图:点集合是原图点集合的非空子集V,然后再在原图的边集合中找到两个端点均在点集合V中的边元素,并将这些边元素称成一个新的边集合,得到的这个边集合就是导出子图的边集合(点集合V和得到的新的边集合组成的新图是原图G的子图,被称为V导出的原图的子图,简称为V的导出子图)1.一个图G可以是自身的子图,生成子图和导出子图2.判断一个原图的子图是否是导出子图的方法:将子图中缺少的点在原图中删去,然后再将由于删去了点后少掉了一个端点的线给去掉,如果子图和这个修改后的原图相等的话,则这个子图就是原图的导出子图,否则就不是3.
问题出在Polygon::FindAxisLeastPenetration:doublePolygon::FindAxisLeastPenetration(unsignedint*faceIndex,constPolygon&polygonA,constPolygon&polygonB)const{doublebestDistance=-std::numeric_limits::infinity();unsignedintbestIndex;for(unsignedinti=0;iGetPosition());vertex.Subtract(polygonB.body->GetPosi
目录方向图乘积定理阵列因子方向图波束扫描阵列方向图和单元方向图方向图乘积定理的python代码示例方向图乘积定理任意形式单元天线构成的直线阵如下图所示:阵中第n个单元的远区辐射场可表示为如下形式:其中An和an分别表示单元天线的激励幅度和相位,f(θ,φ)为单元天线的方向图函数。由上可得,阵列的远区总场为:化简可得阵列的方向图函数为:阵列因子方向图阵列天线的阵因子如下所示:对于均匀直线阵,单元为等间距d排列,激励幅度相同An=A0,激励相位按α均匀递变(递增或递减),可得均匀直线阵的阵因子为:绘制不同阵元数N(N=8、16、32)的阵因子方向图如下所示:不同单元间距d(d=0.3、0.5、1.
根据"GuidetoScalingWebDatabaseswithMySQLCluster",MySQLCluster7.3在使用同步更新复制的同时可以达到99,999%的可用性。这将与CAPTheorem相反因为它指出完美的可用性(99,999%可以这样看,不是吗?)和一致性在分布式系统中是无法实现的。如果负责副本的数据节点不可访问,集群将如何响应更新?对于同步更新复制,它必须阻塞,这会影响可用性。指南指出:ThedatawithinadatanodeissynchronouslyreplicatedtoallnodeswithintheNodeGroup.Ifadatanodefa