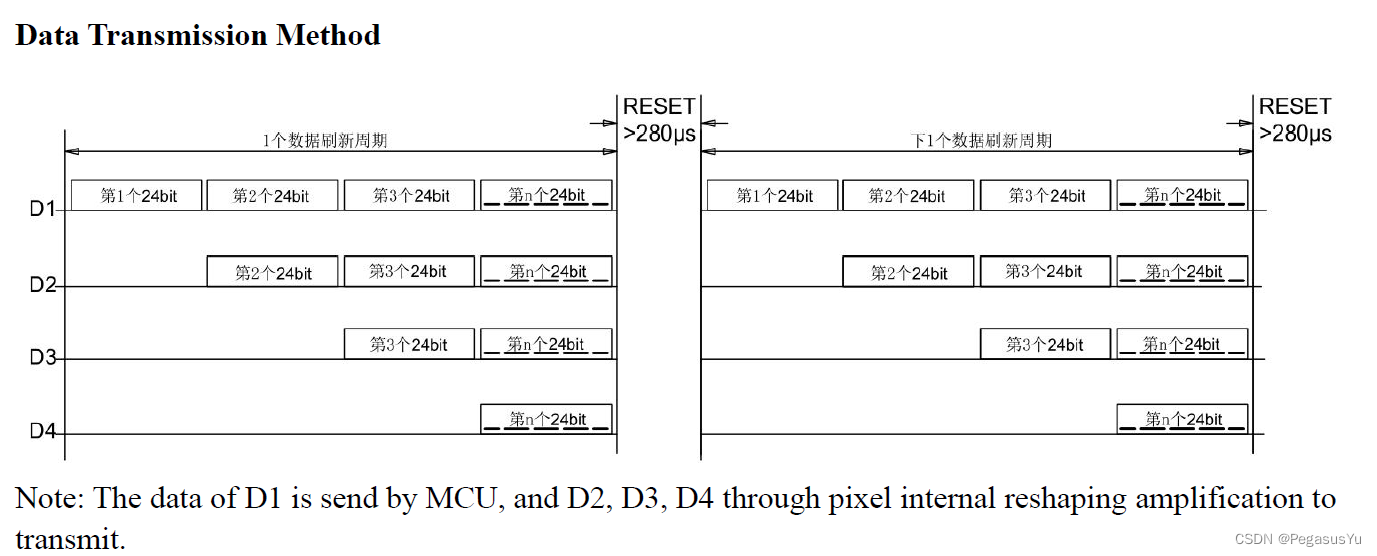
WS2812全彩LED灯模块系列,可以进行级联实现灯带的效果,MCU端通过一个管脚可以控制所有级联的LED灯的不同发光颜色显示。

WS2811(未集成LED)的级联电路如下所示:

WS2812(集成LED)的级联电路如下所示:

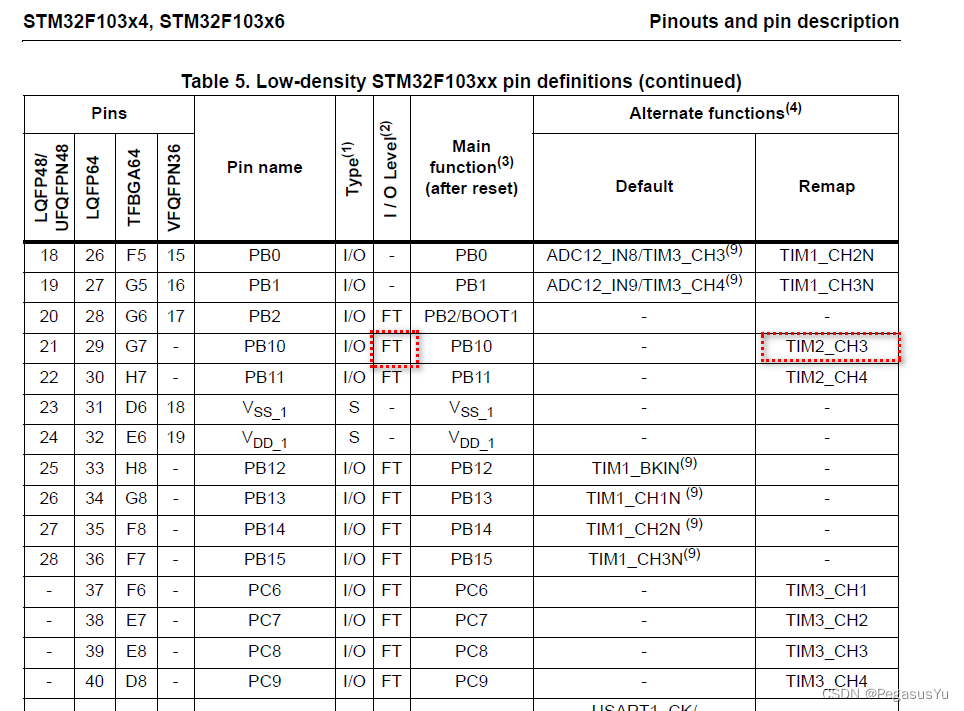
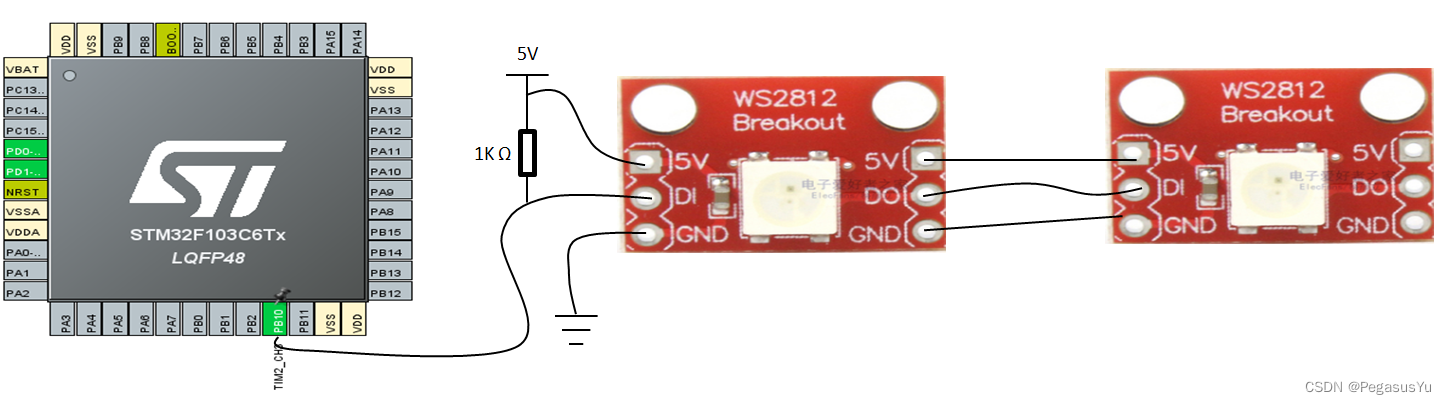
STM32是3.3V供电芯片,输出Push-Pull模式只有3.3V,WS2812采用5V供电,输入Vih为0.7*5=3.5V高于3.3V,所以STM32连接WS2812时要采用有FT耐5V电压的管脚,采用Open-drain的输出方式,并外部上拉1K电阻,实现与第一个WS2812的DI的连接,对于后面级联的WS2812,由前一级DO驱动5V信号输出,直接DO连接DI即可。
实现STM32驱动控制WS282的时序信号,由于时序输出翻转延迟达到了百纳秒级,需要硬件资源驱动的管脚输出,可以用SPI总线的MOSI实现。因为MCU的SPI总线资源较少,定时器资源相对较多,因此这里介绍采用TIM PWM方式的驱动实现。
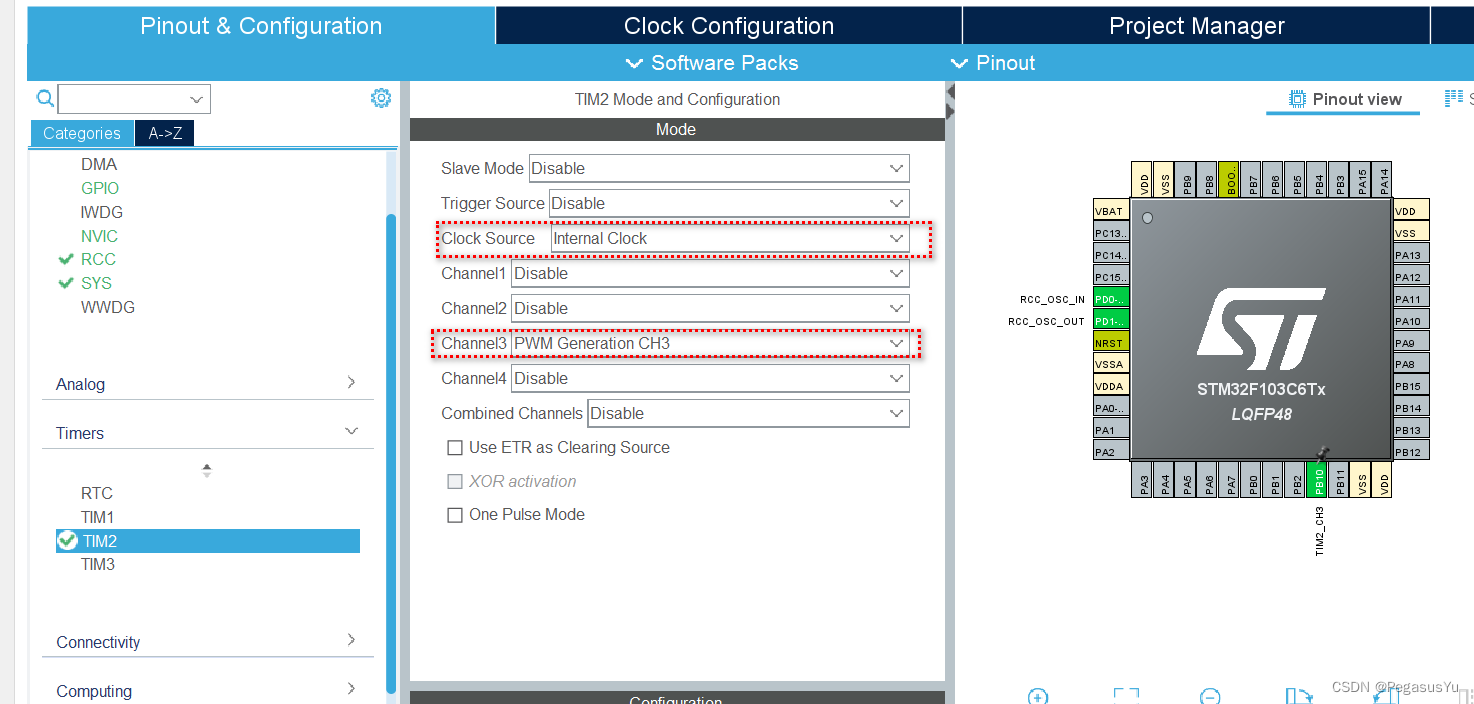
以STM32F103C6T6为例,选择同时具有FT和TIM PWM输出特性的管脚,这里选择PB10:
连接关系简图:
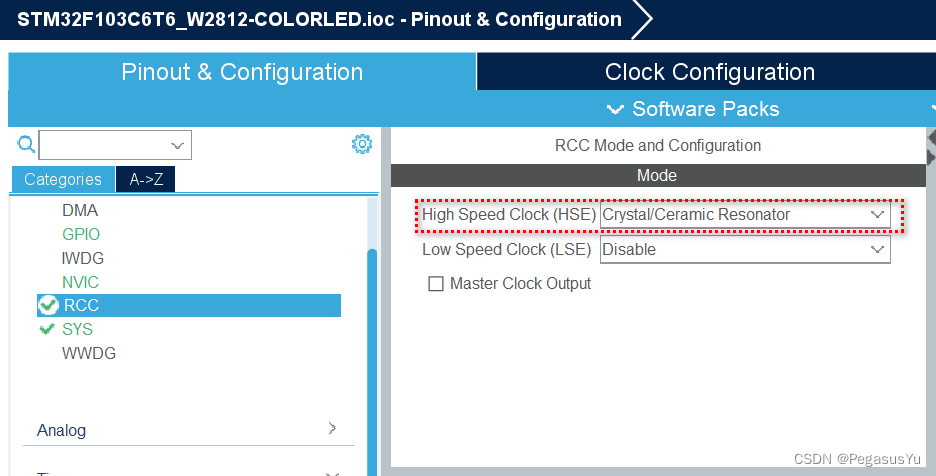
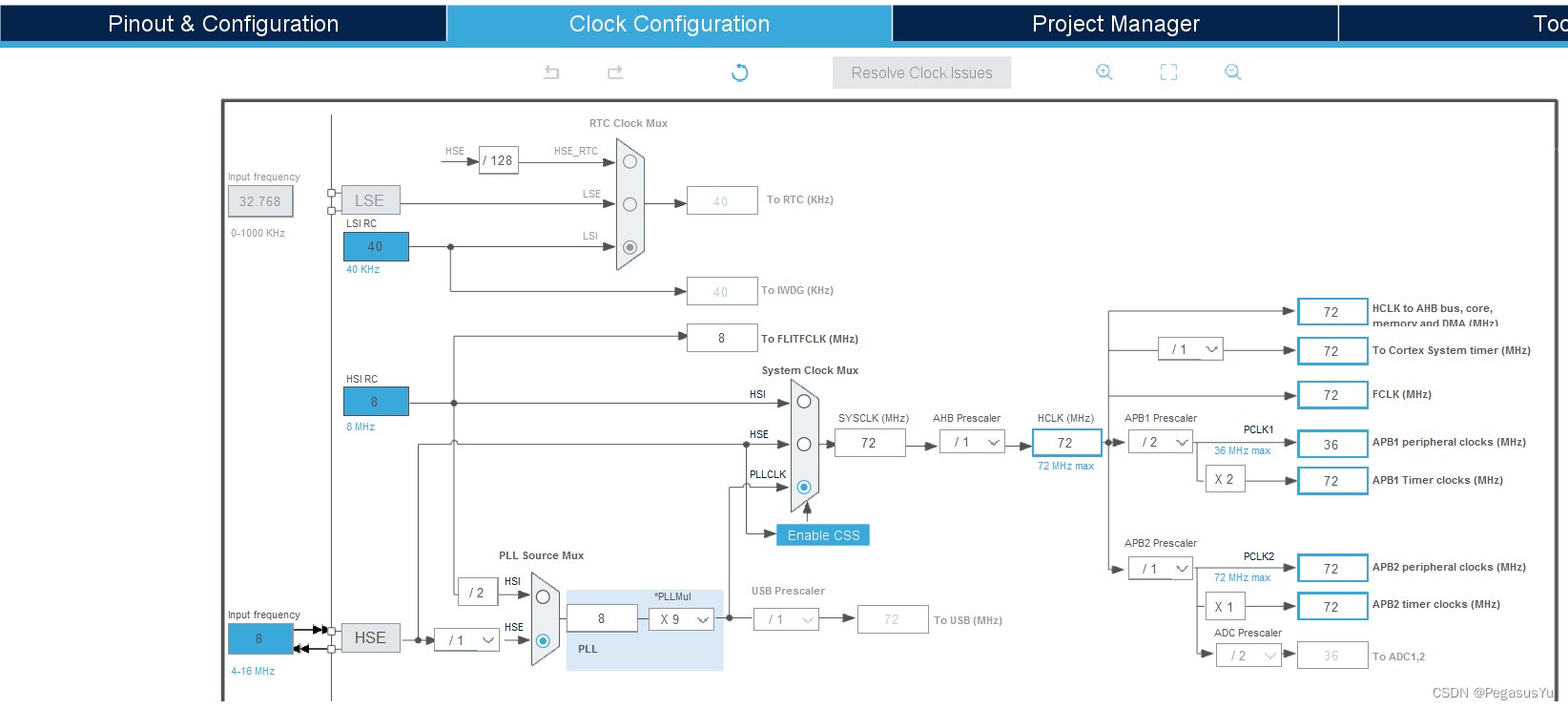
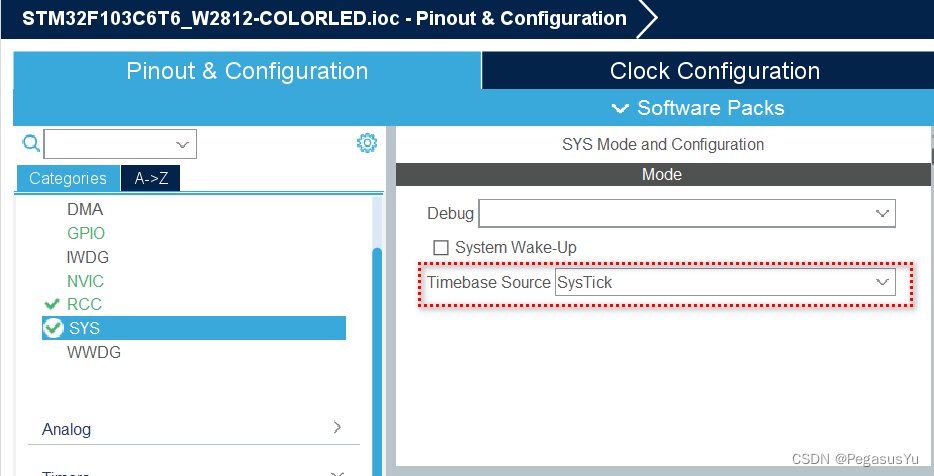
这里以STM32CUBEIDE开发平台对STM32F103C6T6芯片进行配置为例,首先建立基本工程并配置时钟主频为72MHz:
然后配置PB10为TIM PWM输出的Open-drain模式:
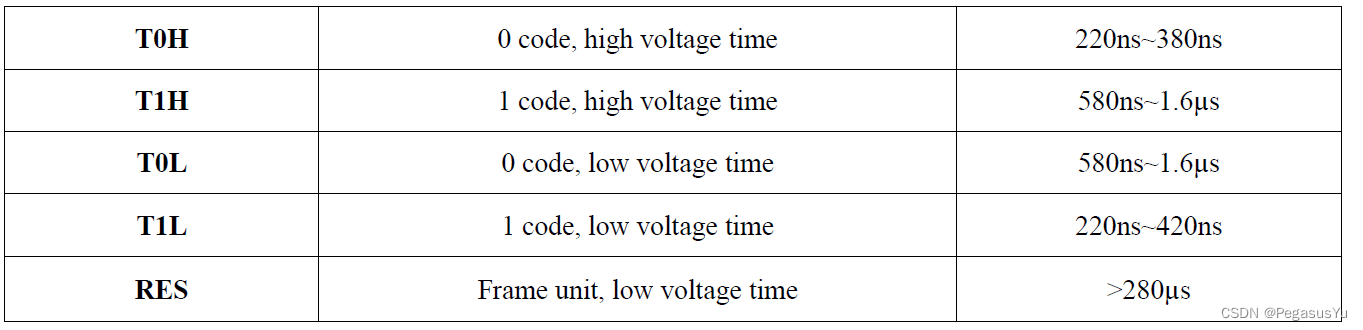
配置TIM时钟为8MHz,并配置PWM的参数:
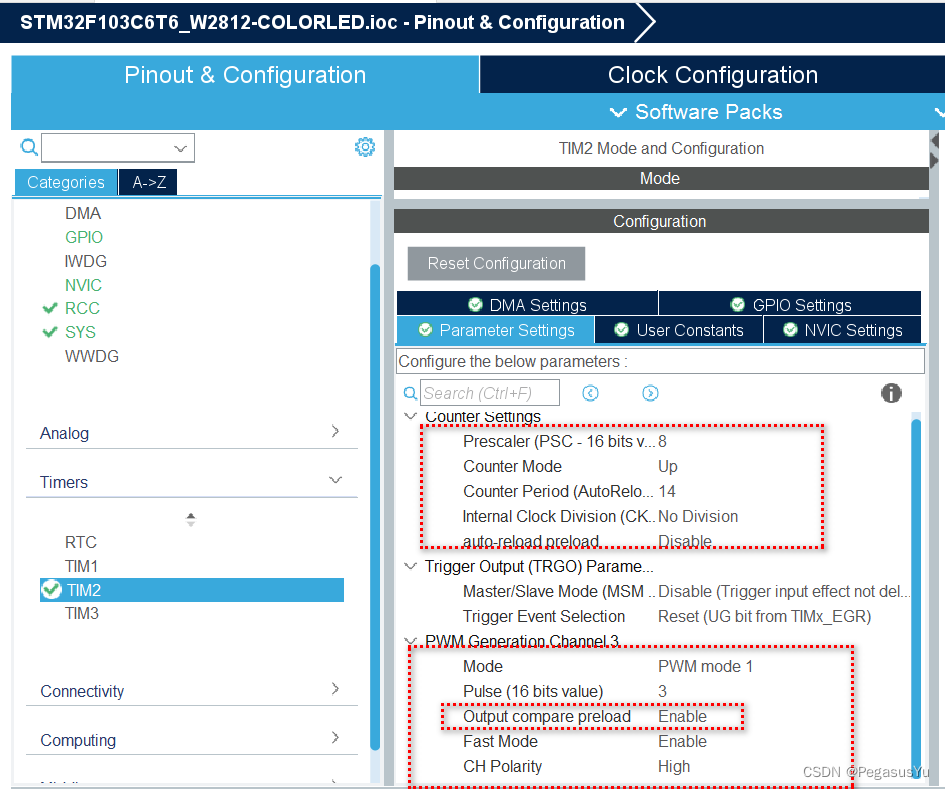
这里需要注意,Output compare preload需要配置为Enable, 因为后面的时序逻辑里,会在当前周期的PWM输出时修改PWM输出的占空比,而这个占空比修改的施行是在下一个周期,并不再当前周期。
保存并产生基本工程代码:
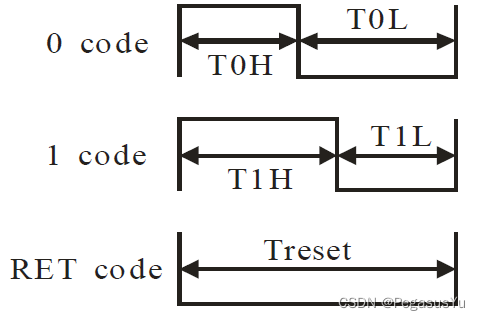
驱动逻辑的实现主要是通过启动TIM PWM输出时,在不同的时刻控制PWM输出的占空比,如RESET指示信号的输出即为控制输出占空比为0,而逻辑1和逻辑0信号的输出则是在每个逻辑输出前调整PWM占空比以对应逻辑1和逻辑0。
代码里用到的纳秒级延时介绍:
STM32 纳秒级延时 (ns delay) 的指令延时实现方式及测定
代码里用到的半微秒级延时介绍:
STM32 HAL us delay(微秒延时)的指令延时实现方式及优化
代码实现单个LED模块驱动,需要驱动多个LED模块, 进行驱动函数扩展即可。完整的代码如下:
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2022 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
__IO float semiusDelayBase;
void PY_semiusDelayTest(void)
{
__IO uint32_t firstms, secondms;
__IO uint32_t counter = 0;
firstms = HAL_GetTick()+1;
secondms = firstms+1;
while(uwTick!=firstms) ;
while(uwTick!=secondms) counter++;
semiusDelayBase = ((float)counter)/2000;
}
void PY_Delay_semius_t(uint32_t Delay)
{
__IO uint32_t delayReg;
__IO uint32_t semiusNum = (uint32_t)(Delay*semiusDelayBase);
delayReg = 0;
while(delayReg!=semiusNum) delayReg++;
}
void PY_semiusDelayOptimize(void)
{
__IO uint32_t firstms, secondms;
__IO float coe = 1.0;
firstms = HAL_GetTick();
PY_Delay_semius_t(2000000) ;
secondms = HAL_GetTick();
coe = ((float)1000)/(secondms-firstms);
semiusDelayBase = coe*semiusDelayBase;
}
void PY_Delay_semius(uint32_t Delay)
{
__IO uint32_t delayReg;
uint32_t msNum = Delay/2000;
uint32_t semiusNum = (uint32_t)((Delay%2000)*semiusDelayBase);
if(msNum>0) HAL_Delay(msNum);
delayReg = 0;
while(delayReg!=semiusNum) delayReg++;
}
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
TIM_HandleTypeDef htim2;
/* USER CODE BEGIN PV */
#define TX_0 __HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_3, 3)
#define TX_1 __HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_3, 12)
#define TX_RST __HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_3, 0)
void PY_RGB_TX_Init(void)
{
__HAL_TIM_SetCounter(&htim2, 0);
TX_RST;
HAL_TIM_PWM_Start(&htim2,TIM_CHANNEL_3);
PY_Delay_semius_t(600);
}
#define timing_delay {ns_delay >>= 1;ns_delay >>= 1;ns_delay >>= 1;ns_delay >>= 1;ns_delay >>= 1;ns_delay >>= 1;ns_delay >>= 1;ns_delay >>= 1;ns_delay >>= 1;ns_delay >>= 1;ns_delay >>= 1;ns_delay >>= 1;ns_delay >>= 1;ns_delay >>= 1;ns_delay >>= 1;ns_delay >>= 1;ns_delay >>= 1;ns_delay >>= 1;ns_delay >>= 1;ns_delay >>= 1;ns_delay >>= 1;ns_delay >>= 1;ns_delay >>= 1;ns_delay >>= 1;}
void PY_RGB_TX_24bits(uint8_t R, uint8_t G, uint8_t B) //Written by Pegasus Yu in 2022
{ //Data transmit in order of GRB, high bit data at first
__IO uint32_t ns_delay = 0x55555555;
__HAL_TIM_SetCounter(&htim2, 0);
if((G<<0)&0x80) TX_1;
else TX_0;
timing_delay
if((G<<1)&0x80) TX_1;
else TX_0;
timing_delay
if((G<<2)&0x80) TX_1;
else TX_0;
timing_delay
if((G<<3)&0x80) TX_1;
else TX_0;
timing_delay
if((G<<4)&0x80) TX_1;
else TX_0;
timing_delay
if((G<<5)&0x80) TX_1;
else TX_0;
timing_delay
if((G<<6)&0x80) TX_1;
else TX_0;
timing_delay
if((G<<7)&0x80) TX_1;
else TX_0;
timing_delay
if((R<<0)&0x80) TX_1;
else TX_0;
timing_delay
if((R<<1)&0x80) TX_1;
else TX_0;
timing_delay
if((R<<2)&0x80) TX_1;
else TX_0;
timing_delay
if((R<<3)&0x80) TX_1;
else TX_0;
timing_delay
if((R<<4)&0x80) TX_1;
else TX_0;
timing_delay
if((R<<5)&0x80) TX_1;
else TX_0;
timing_delay
if((R<<6)&0x80) TX_1;
else TX_0;
timing_delay
if((R<<7)&0x80) TX_1;
else TX_0;
timing_delay
if((B<<0)&0x80) TX_1;
else TX_0;
timing_delay
if((B<<1)&0x80) TX_1;
else TX_0;
timing_delay
if((B<<2)&0x80) TX_1;
else TX_0;
timing_delay
if((B<<3)&0x80) TX_1;
else TX_0;
timing_delay
if((B<<4)&0x80) TX_1;
else TX_0;
timing_delay
if((B<<5)&0x80) TX_1;
else TX_0;
timing_delay
if((B<<6)&0x80) TX_1;
else TX_0;
timing_delay
if((B<<7)&0x80) TX_1;
else TX_0;
PY_Delay_semius_t(1);
TX_RST;
PY_Delay_semius_t(600);
}
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_TIM2_Init(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_TIM2_Init();
/* USER CODE BEGIN 2 */
PY_semiusDelayTest();
PY_semiusDelayOptimize();
PY_RGB_TX_Init();
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
PY_RGB_TX_24bits(255, 0, 0);
PY_Delay_semius_t(4000000);
PY_RGB_TX_24bits(0, 255, 0);
PY_Delay_semius_t(4000000);
PY_RGB_TX_24bits(0, 0, 255);
PY_Delay_semius_t(4000000);
PY_RGB_TX_24bits(127, 0, 127);
PY_Delay_semius_t(4000000);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief TIM2 Initialization Function
* @param None
* @retval None
*/
static void MX_TIM2_Init(void)
{
/* USER CODE BEGIN TIM2_Init 0 */
/* USER CODE END TIM2_Init 0 */
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_OC_InitTypeDef sConfigOC = {0};
/* USER CODE BEGIN TIM2_Init 1 */
/* USER CODE END TIM2_Init 1 */
htim2.Instance = TIM2;
htim2.Init.Prescaler = 8;
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = 14;
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_Base_Init(&htim2) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim2, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_PWM_Init(&htim2) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 3;
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_ENABLE;
if (HAL_TIM_PWM_ConfigChannel(&htim2, &sConfigOC, TIM_CHANNEL_3) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM2_Init 2 */
/* USER CODE END TIM2_Init 2 */
HAL_TIM_MspPostInit(&htim2);
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOD_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
注意MCU在不同主频下,#define timing_delay 后的 ns_delay >>= 1; 数量应做适应性调整以满足纳秒级时序要求。
上述代码实现4个延时的循环显示(包括典型的红色,绿色,蓝色),时序波形测试及颜色显示效果如下:
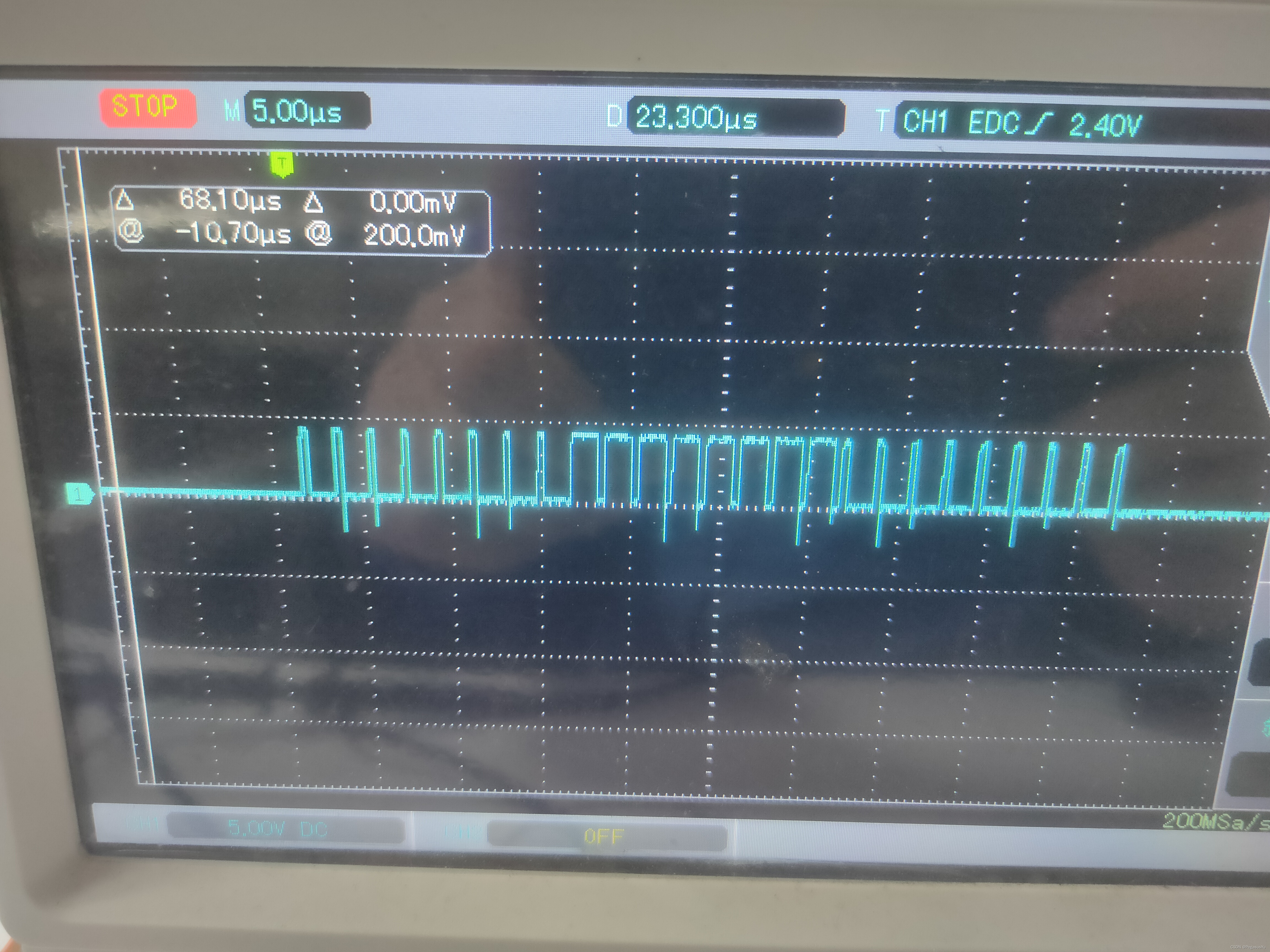

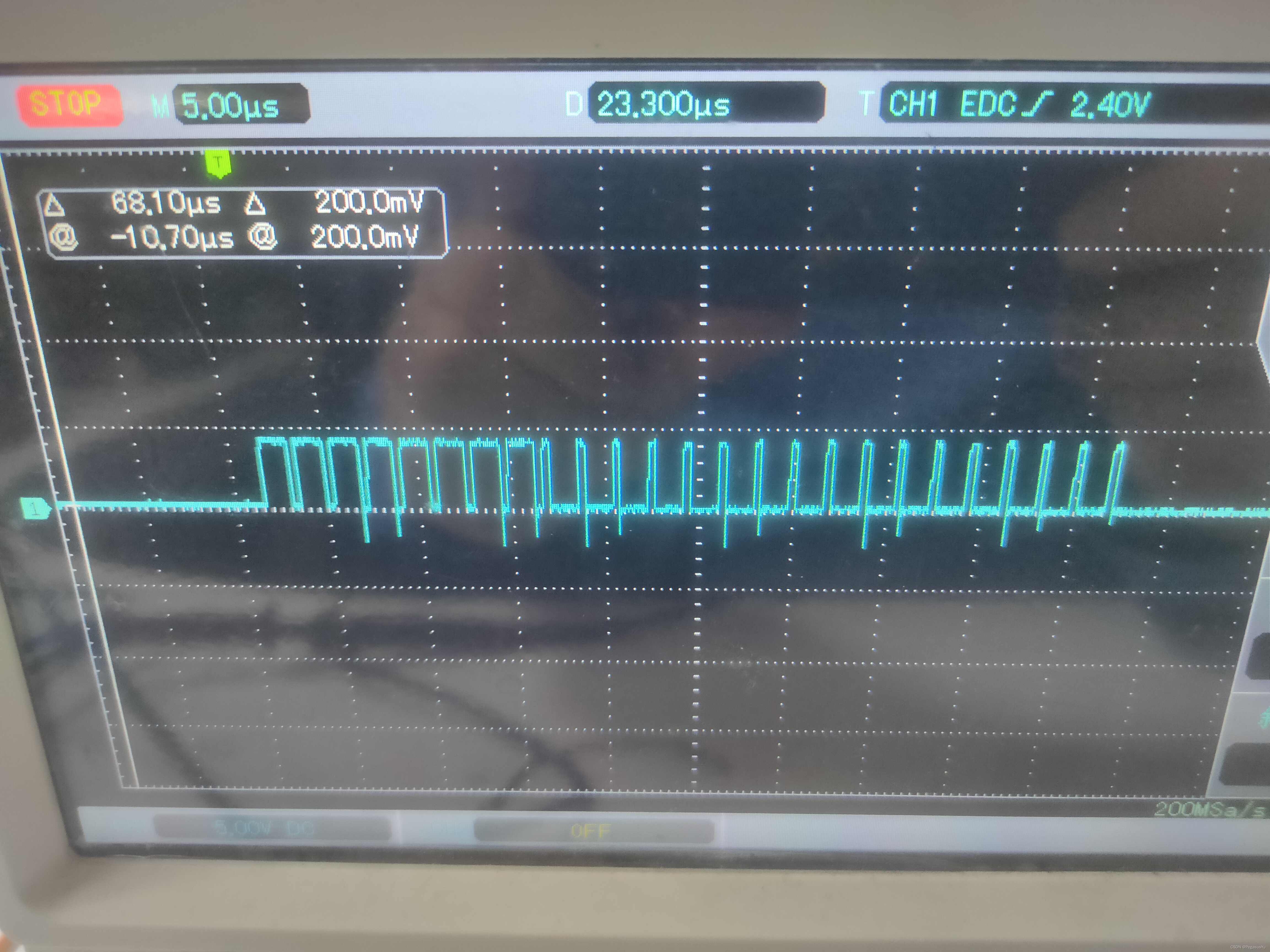

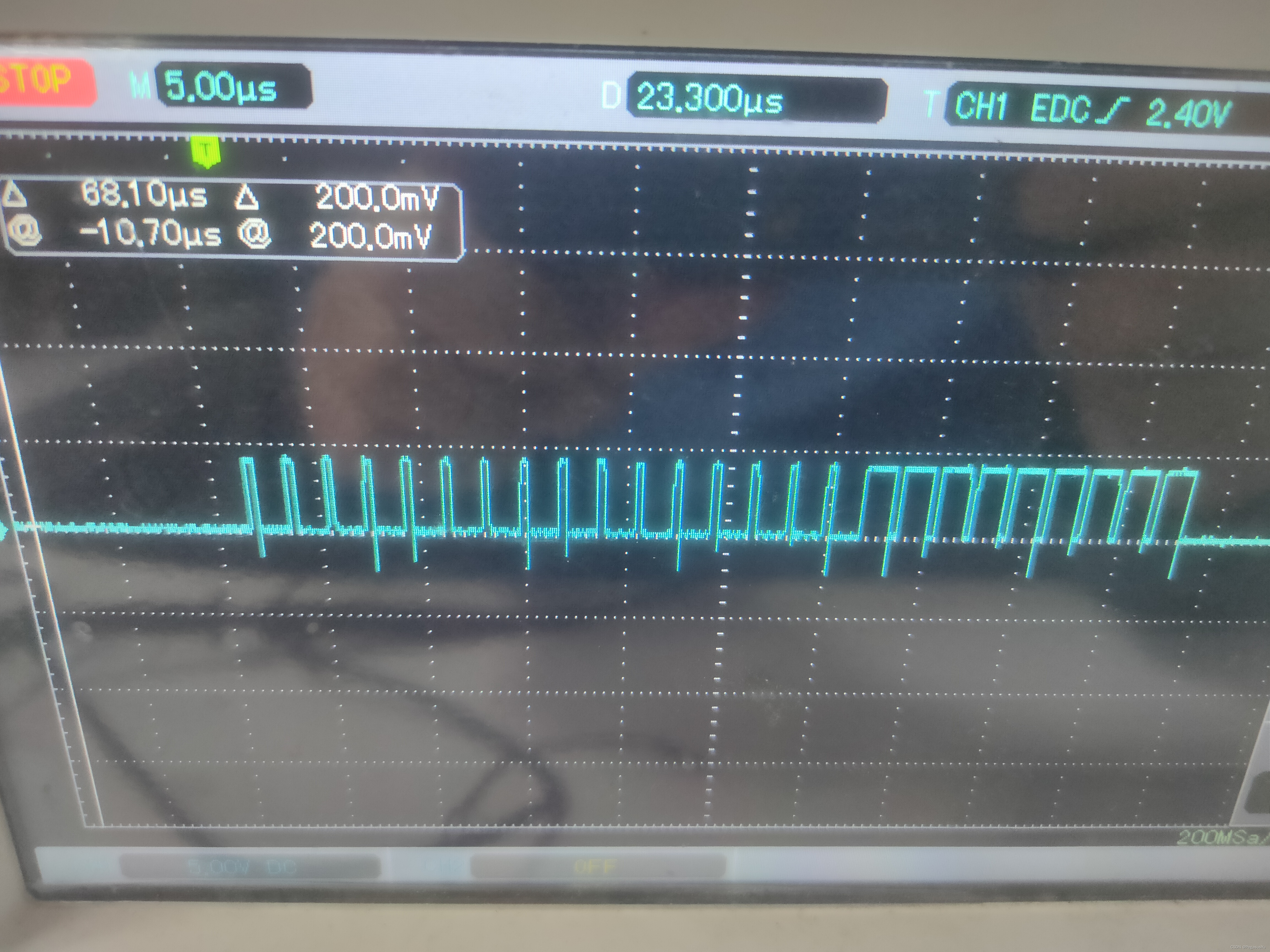
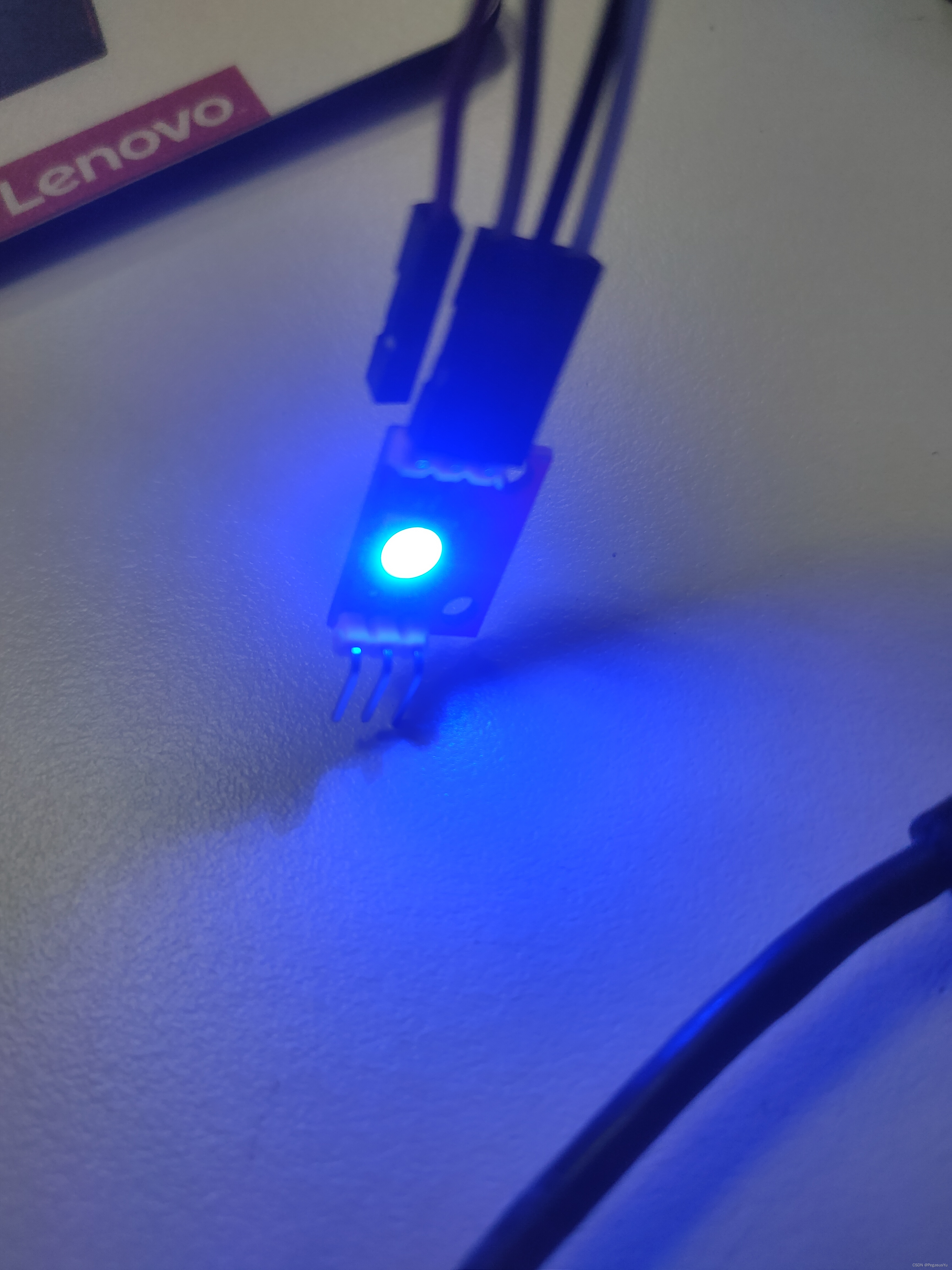
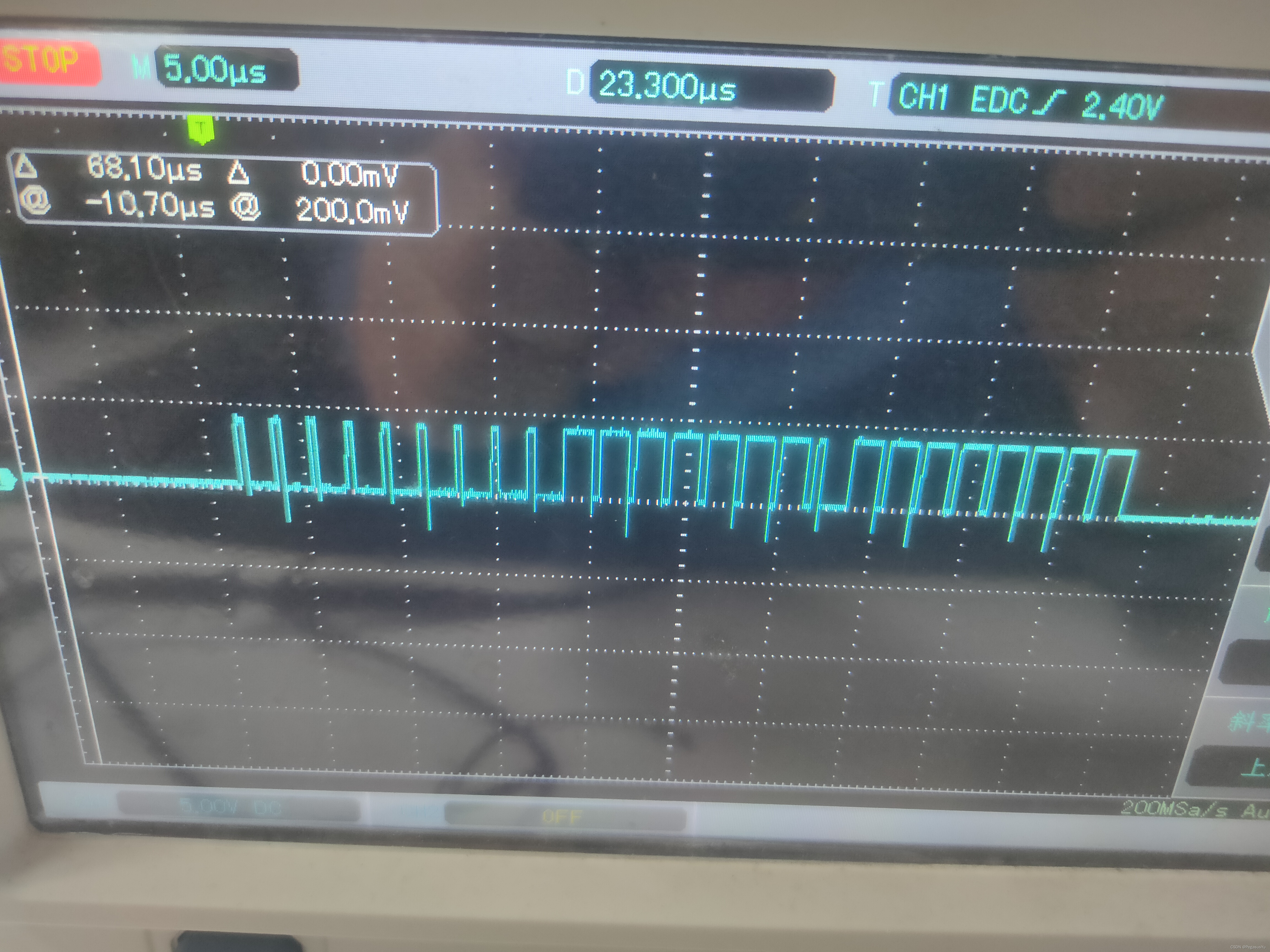
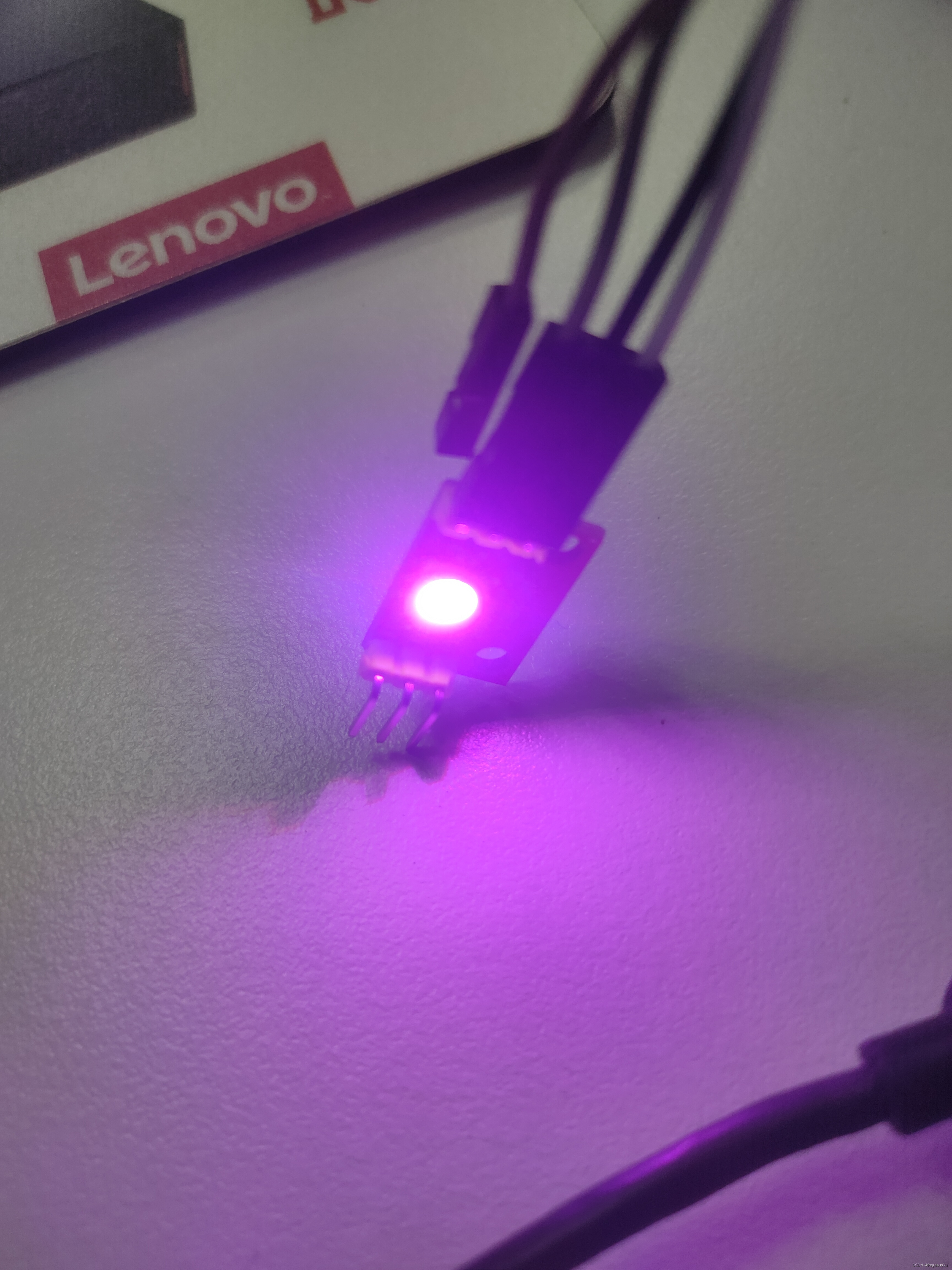
–End–
假设我做了一个模块如下:m=Module.newdoclassCendend三个问题:除了对m的引用之外,还有什么方法可以访问C和m中的其他内容?我可以在创建匿名模块后为其命名吗(就像我输入“module...”一样)?如何在使用完匿名模块后将其删除,使其定义的常量不再存在? 最佳答案 三个答案:是的,使用ObjectSpace.此代码使c引用你的类(class)C不引用m:c=nilObjectSpace.each_object{|obj|c=objif(Class===objandobj.name=~/::C$/)}当然这取决于
作为我的Rails应用程序的一部分,我编写了一个小导入程序,它从我们的LDAP系统中吸取数据并将其塞入一个用户表中。不幸的是,与LDAP相关的代码在遍历我们的32K用户时泄漏了大量内存,我一直无法弄清楚如何解决这个问题。这个问题似乎在某种程度上与LDAP库有关,因为当我删除对LDAP内容的调用时,内存使用情况会很好地稳定下来。此外,不断增加的对象是Net::BER::BerIdentifiedString和Net::BER::BerIdentifiedArray,它们都是LDAP库的一部分。当我运行导入时,内存使用量最终达到超过1GB的峰值。如果问题存在,我需要找到一些方法来更正我的代
我有一个包含模块的模型。我想在模块中覆盖模型的访问器方法。例如:classBlah这显然行不通。有什么想法可以实现吗? 最佳答案 您的代码看起来是正确的。我们正在毫无困难地使用这个确切的模式。如果我没记错的话,Rails使用#method_missing作为属性setter,因此您的模块将优先,阻止ActiveRecord的setter。如果您正在使用ActiveSupport::Concern(参见thisblogpost),那么您的实例方法需要进入一个特殊的模块:classBlah
我刚刚被困在这个问题上一段时间了。以这个基地为例:moduleTopclassTestendmoduleFooendend稍后,我可以通过这样做在Foo中定义扩展Test的类:moduleTopmoduleFooclassSomeTest但是,如果我尝试通过使用::指定模块来最小化缩进:moduleTop::FooclassFailure这失败了:NameError:uninitializedconstantTop::Foo::Test这是一个错误,还是仅仅是Ruby解析变量名的方式的逻辑结果? 最佳答案 Isthisabug,or
我想获取模块中定义的所有常量的值:moduleLettersA='apple'.freezeB='boy'.freezeendconstants给了我常量的名字:Letters.constants(false)#=>[:A,:B]如何获取它们的值的数组,即["apple","boy"]? 最佳答案 为了做到这一点,请使用mapLetters.constants(false).map&Letters.method(:const_get)这将返回["a","b"]第二种方式:Letters.constants(false).map{|c
我的假设是moduleAmoduleBendend和moduleA::Bend是一样的。我能够从thisblog找到解决方案,thisSOthread和andthisSOthread.为什么以及什么时候应该更喜欢紧凑语法A::B而不是另一个,因为它显然有一个缺点?我有一种直觉,它可能与性能有关,因为在更多命名空间中查找常量需要更多计算。但是我无法通过对普通类进行基准测试来验证这一点。 最佳答案 这两种写作方法经常被混淆。首先要说的是,据我所知,没有可衡量的性能差异。(在下面的书面示例中不断查找)最明显的区别,可能也是最著名的,是你的
我一直致力于让我们的Rails2.3.8应用程序在JRuby下正确运行。一切正常,直到我启用config.threadsafe!以实现JRuby提供的并发性。这导致lib/中的模块和类不再自动加载。使用config.threadsafe!启用:$rubyscript/runner-eproduction'pSim::Sim200Provisioner'/Users/amchale/.rvm/gems/jruby-1.5.1@web-services/gems/activesupport-2.3.8/lib/active_support/dependencies.rb:105:in`co
按照目前的情况,这个问题不适合我们的问答形式。我们希望答案得到事实、引用或专业知识的支持,但这个问题可能会引发辩论、争论、投票或扩展讨论。如果您觉得这个问题可以改进并可能重新打开,visitthehelpcenter指导。关闭10年前。问题1)我想知道rubyonrails是否有功能类似于primefaces的gem。我问的原因是如果您使用primefaces(http://www.primefaces.org/showcase-labs/ui/home.jsf),开发人员无需担心javascript或jquery的东西。据我所知,JSF是一个规范,基于规范的各种可用实现,prim
本教程将在Unity3D中混合Optitrack与数据手套的数据流,在人体运动的基础上,添加双手手指部分的运动。双手手背的角度仍由Optitrack提供,数据手套提供双手手指的角度。 01 客户端软件分别安装MotiveBody与MotionVenus并校准人体与数据手套。MotiveBodyMotionVenus数据手套使用、校准流程参照:https://gitee.com/foheart_1/foheart-h1-data-summary.git02 数据转发打开MotiveBody软件的Streaming,开始向Unity3D广播数据;MotionVenus中设置->选项选择Unit
文章目录1.开发板选择*用到的资源2.串口通信(个人理解)3.代码分析(注释比较详细)1.主函数2.串口1配置3.串口2配置以及中断函数4.注意问题5.源码链接1.开发板选择我用的是STM32F103RCT6的板子,不过代码大概在F103系列的板子上都可以运行,我试过在野火103的霸道板上也可以,主要看一下串口对应的引脚一不一样就行了,不一样的就更改一下。*用到的资源keil5软件这里用到了两个串口资源,采集数据一个,串口通信一个,板子对应引脚如下:串口1,TX:PA9,RX:PA10串口2,TX:PA2,RX:PA32.串口通信(个人理解)我就从串口采集传感器数据这个过程说一下我自己的理解,