2022年4月28日,在华为折叠旗舰及全场景新品发布上,华为Mate Xs 2折叠屏手机搭载由HMS Core定位服务(Location Kit)提供的3D精准室内定位技术,为用户提供了“店铺级”定位能力。目前,该能力已经覆盖国内160+城市、1300+核心商圈、20+大型交通枢纽等大中型公共建筑,为用户打造室内精准定位的出行体验。
室内定位技术在商场室内导购、高铁机场出行等生活场景,以及游客导览、外卖骑手到店履约等行业场景都有广泛的需求。
当前业界已经有多种室内定位方案,如基于蓝牙标签、UWB基站的硬件部署方案,以及人工采集WiFi/地磁方案等。但是这些方案存在场所覆盖量少、成本高昂、无法自动学习更新等不足。
为了解决这些痛点,HMS Core定位服务通过突破多项关键技术,最终实现了广覆盖、低成本、自学习的精准室内定位功能,通过统一的API接口支持HarmonyOS等主流移动OS系统,确保即使从室外延伸到室内,都能获取无缝的精准定位服务。
HMS Core定位服务通过如下4个关键技术实现广覆盖、低成本、自学习的3D精准室内定位能力。
AI惯导轨迹估计技术
多源信号因子图优化技术
AI楼层识别技术
概率建模高精度定位技术

3D精准室内定位技术概要图
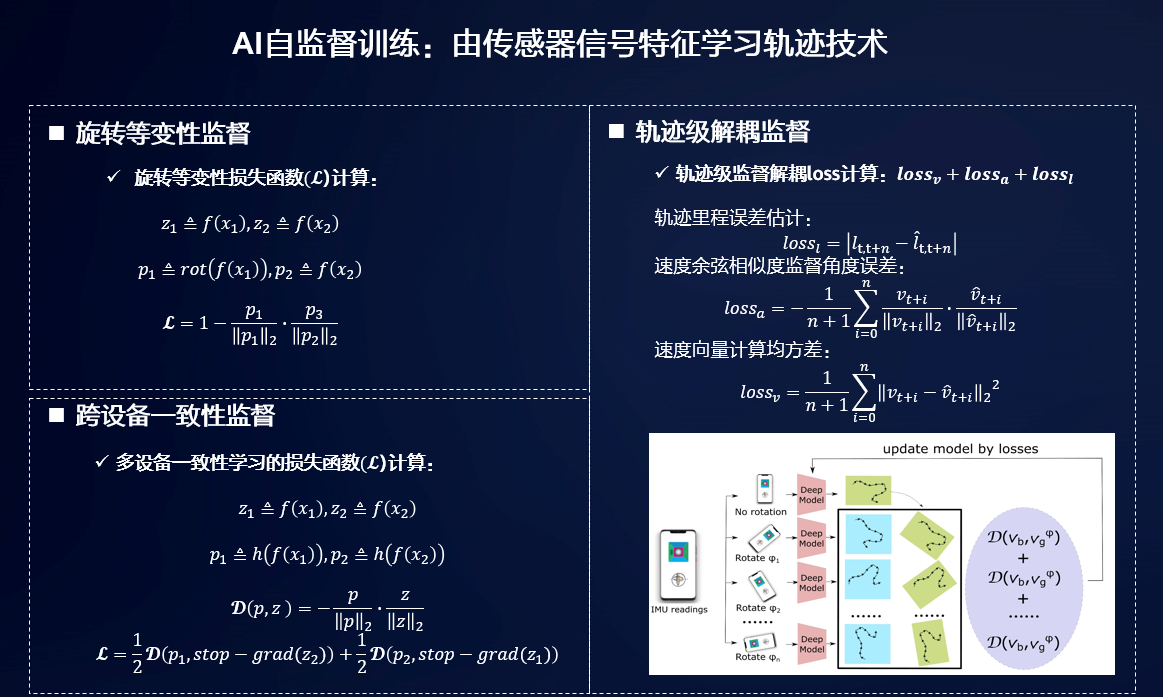
AI惯导原理
业界通用的PDR估计模型,基于步态检测和步长估计的航迹推算,该模型对人的高矮、行走快慢、手机姿态切换等非常敏感,导致不同场景下,轨迹长度和方向的估计不稳定,误差抖动大。 HMS Core定位服务提供AI惯导轨迹估计技术解决该问题。该技术通过AI自监督学习的方法,只需原10%的标定数据即可实现同样的轨迹位姿估计精度,不仅减少了对训练数据量的依赖,同时提高了对用户行为姿态的泛化适应能力;另外采用华为自研的RIO网络设计,将轨迹估计精度进一步提升了30%以上(华为实验室测试数据),能够应对现实生活中各种用户在复杂室内环境中的定位需求。
多源信号因子图优化技术

多源信号因子图优化技术原理
HMS Core定位服务提供的多源信号因子图优化技术,基于信号传播模型基础理论,引入了图论的方法对5G、UWB、FTM、WiFi、BLE、RF等多源信号进行表征,将传统的特征匹配问题转换成了图优化问题,这样不仅提高了大数据处理的效率,而且也使得数据模型更准确地刻画了信号地图的特征。该技术将无序的轨迹分布构建成有序的2D平面拓扑的信号地图,并且能够随着信号覆盖密度的增加,最终达到“店铺级”位置分辨精度。
从无序的轨迹到有序2D拓扑构建实例展示
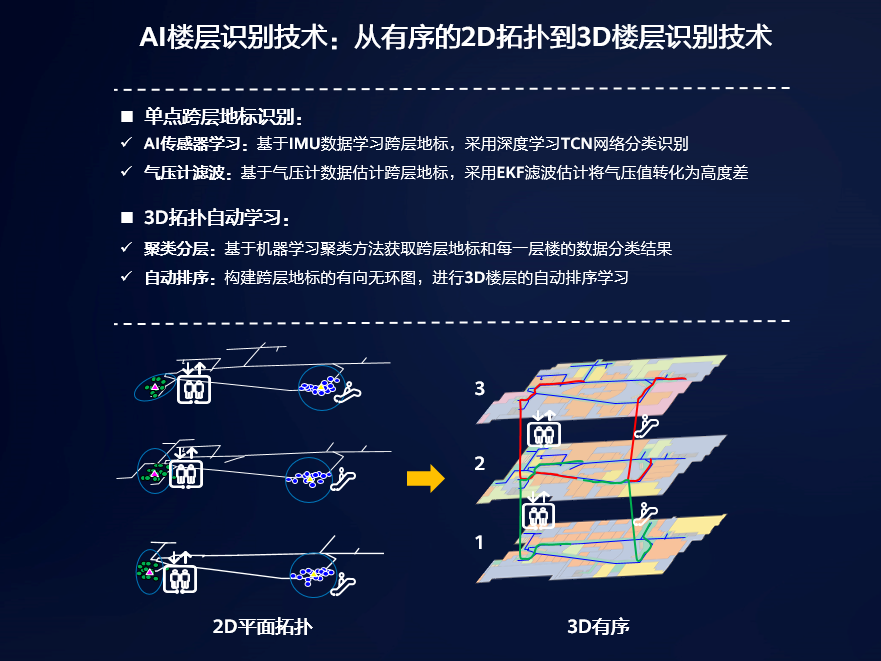
AI楼层识别技术原理
室内定位,还需要解决用户在不同楼层移动产生的跨楼层定位问题,包括楼梯、电梯和自动扶梯等场景。HMS Core定位服务通过AI学习跨层地标属性,并对不同楼梯类型进行自动排序,通过AI楼层识别技术,实现3D楼层定位,准确率平均优于95%(华为实验室测试数据)
从2D有序拓扑到3D有序拓扑构建实例展示
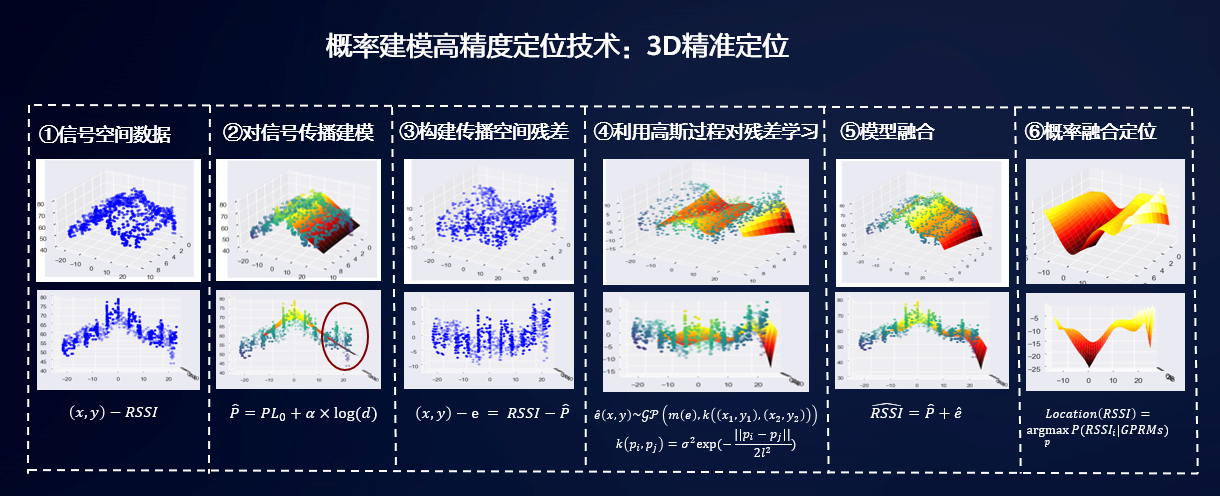
概率建模高精度定位技术原理
HMS Core定位服务提供的概率建模高精度定位技术,基于信号传播模型的分布特征,提出高斯过程对信号残差建模和自适应的学习超参数,将信号轨迹覆盖区域扩展到轨迹未经过区域。并且随着不断的AI自学习,越来越逼近模型估计最优解,从而使得定位更精准。
在存在室内地图的场景下,还可以进一步通过地图匹配算法提升定位精度。

华为Mate Xs 2折叠屏手机发布会现场图
以上技术来自华为2012黎曼实验室(Riemann Lab),通过HMS Core定位服务(Location Kit)面向开发者开放,目前HUAWEI Mate Xs 2折叠屏手机用户使用高德地图APP即可实现“店铺级”精准室内定位体验,后续还将有更多华为机型支持3D精准室内定位技术。
同时,伴随HMS生态布局全面加速,HMS Core 定位服务、地图服务、位置服务等核心应用开发能力也迎来快速提升,2021年6月整合推出了Petal Maps Platform,并全面对开发者与合作伙伴开放。Petal Maps Platform地图服务平台目前已拥有22个丰富的地图服务能力,截止2021年底已覆盖全球200多个国家与地区的开发者,积累了2.6亿+POI数据,支持70多种地图展示与搜索语言,接入开发者数量超20000。
其他更多关于HMS Core定位服务的信息,请访问华为开发者联盟官网-HMS Core定位服务,相关技术请参考论文清单。
参考文献:
1.AI惯导轨迹估计技术:
《RIO: Rotation-equivariance supervised learning of robust inertial odometry》, 2022 CVPR, 华为2012黎曼实验室(Riemann Lab)。
2.信号空间到距离约束建模技术:
《Mining geometric constraints from crowd-sourced radio signals and its application to information fusion and indoor positioning》, 2021 IEEE Access, 华为2012黎曼实验室(Riemann Lab)。
3.概率建模的高精度定位技术:
《Measuring Uncertainty in Signal Fingerprinting with Gaussian Processes Going Deep》, 2021 IPIN, 华为2012黎曼实验室(Riemann Lab)。
了解更多详情>>
访问华为开发者联盟官网
获取开发指导文档
华为移动服务开源仓库地址:GitHub、Gitee
关注我们,第一时间了解 HMS Core 最新技术资讯~
无论您是想搭建桌面端、WEB端或者移动端APP应用,HOOPSPlatform组件都可以为您提供弹性的3D集成架构,同时,由工业领域3D技术专家组成的HOOPS技术团队也能为您提供技术支持服务。如果您的客户期望有一种在多个平台(桌面/WEB/APP,而且某些客户端是“瘦”客户端)快速、方便地将数据接入到3D应用系统的解决方案,并且当访问数据时,在各个平台上的性能和用户体验保持一致,HOOPSPlatform将帮助您完成。利用HOOPSPlatform,您可以开发在任何环境下的3D基础应用架构。HOOPSPlatform可以帮您打造3D创新型产品,HOOPSSDK包含的技术有:快速且准确的CAD
本教程将在Unity3D中混合Optitrack与数据手套的数据流,在人体运动的基础上,添加双手手指部分的运动。双手手背的角度仍由Optitrack提供,数据手套提供双手手指的角度。 01 客户端软件分别安装MotiveBody与MotionVenus并校准人体与数据手套。MotiveBodyMotionVenus数据手套使用、校准流程参照:https://gitee.com/foheart_1/foheart-h1-data-summary.git02 数据转发打开MotiveBody软件的Streaming,开始向Unity3D广播数据;MotionVenus中设置->选项选择Unit
Unity自动旋转动画1.开门需要门把手先动,门再动2.关门需要门先动,门把手再动3.中途播放过程中不可以再次进行操作觉得太复杂?查看我的文章开关门简易进阶版效果:如果这个门可以直接打开的话,就不需要放置"门把手"如果门把手还有钥匙需要旋转,那就可以把钥匙放在门把手的"门把手",理论上是可以无限套娃的可调整参数有:角度,反向,轴向,速度运行时点击Test进行测试自己写的代码比较垃圾,命名与结构比较拉,高手轻点喷,新手有类似的需求可以拿去做参考上代码usingSystem.Collections;usingSystem.Collections.Generic;usingUnityEngine;u
之前说过10之后的版本没有3dScan了,所以还是9.8的版本或者之前更早的版本。 3d物体扫描需要先下载扫描的APK进行扫面。首先要在手机上装一个扫描程序,扫描现实中的三维物体,然后上传高通官网,在下载成UnityPackage类型让Unity能够使用这个扫描程序可以从高通官网上进行下载,是一个安卓程序。点到Tools往下滑,找到VuforiaObjectScanner下载后解压数据线连接手机,将apk文件拷入手机安装然后刚才解压文件中的Media文件夹打开,两个PDF图打印第一张A4-ObjectScanningTarget.pdf,主要是用来辅助扫描的。好了,接下来就是扫描三维物体。将瓶
本文主要介绍在使用Selenium进行自动化测试或者任务时,对于使用了iframe的页面,如何定位iframe中的元素文章目录场景描述解决方案具体代码场景描述当我们在使用Selenium进行自动化测试的时候,可能会遇到一些界面或者窗体是使用HTML的iframe标签进行承载的。对于iframe中的标签,如果直接查找是无法找到的,会抛出没有找到元素的异常。比如近在咫尺的例子就是,CSDN的登录窗体就是使用的iframe,大家可以尝试通过F12开发者模式查看到的tag_name,class_name,id或者xpath来定位中的页面元素,会抛出NoSuchElementException异常。解决
关闭。这个问题不符合StackOverflowguidelines.它目前不接受答案。要求我们推荐或查找工具、库或最喜欢的场外资源的问题对于StackOverflow来说是偏离主题的,因为它们往往会吸引自以为是的答案和垃圾邮件。相反,describetheproblem以及迄今为止为解决该问题所做的工作。关闭9年前。Improvethisquestion是否有适用于这些的3d游戏引擎?
文章目录1.自动驾驶实战:基于Paddle3D的点云障碍物检测1.1环境信息1.2准备点云数据1.3安装Paddle3D1.4模型训练1.5模型评估1.6模型导出1.7模型部署效果附录show_lidar_pred_on_image.py1.自动驾驶实战:基于Paddle3D的点云障碍物检测项目地址——自动驾驶实战:基于Paddle3D的点云障碍物检测课程地址——自动驾驶感知系统揭秘1.1环境信息硬件信息CPU:2核AI加速卡:v100总显存:16GB总内存:16GB总硬盘:100GB环境配置Python:3.7.4框架信息框架版本:PaddlePaddle2.4.0(项目默认框架版本为2.3
大家好,我叫胡飞虎,花名虎仔,目前负责云效旗下产品Codeup代码托管的设计与开发。代码作为企业最核心的数据资产,除了被构建、部署之外还有更大的价值。为了帮助企业和团队挖掘更多源代码价值以赋能日常代码研发、运维等工作,云效代码团队在大数据和智能化方向进行了一系列的探索和实践(例如代码搜索与推荐),本文主要介绍我们如何通过直接打通源代码来提高研发与运维效率。随着微服务架构的流行,一个业务流程需要多个微服务共同完成。一旦出现问题,运维人员在面对数量多、调用链路复杂的情况下,很难快速锁定导致问题发生的罪魁祸首:代码。为了提高排查效率,目前常见的解决方案是:链路跟踪+日志分析工具相结合。即通过链路跟踪
目录一、世界坐标系与本地坐标系二、srcGameObject.transform.TransformPoint(Vector3 vec)三、srcGameObject.transform.TransformVector(Vector3 vec)四、srcGameObject.transform.TransformDirection(Vector3 vec)五:示例一、世界坐标系与本地坐标系 世界坐标很好理解,就是模型的transform.position,通常在无父物体的情况下,创建出来的模型默认位置就是世界坐标系的原点。 每个物体都有自身的坐标系,此坐标系就是本地坐标系。本地坐标
我看到很多很酷的东西可以添加到我的Ruby控制台中。例如,一个好的列表是“My.irbrcforconsole/irb”。我用谷歌搜索,但我只找到了网络日志,上面写着人们在他们的.irbrc中添加了什么gem。没有人说在哪里可以找到它。我找不到“irbrc”。我打开了我的主文件夹,如果我输入IRB,它会转到Ruby控制台,但我找不到这个文件。谁能帮我找到它? 最佳答案 这是一个irbrc点文件,因此您需要在您的主目录中ls-a才能找到它。如果它不在那里,只需创建一个.irbrc文件。我的很简单,但这就是我的内容:require'ru