conda create -n aiit2 python=3.8安装报错
A reportable application error has occurred. Conda has prepared the above report......
conda create -n aiit2 python=3.8安装报错,一大段,一开始以为是版本不兼容原因,然后一直调版本。我甚至一度以为我是不是删了Anaconda组件了,Anaconda是不是没救了。不瞒大家,我火绒都下载好了,就准备删除Anaconda后把注册表信息删了。下面我们来看看问题产生原因和解决方式吧。
就是安装错误,起初以为是版本原因,后来几经尝试发现和版本没有毛的关系,但是大部分情况下我们第一次想到的应该还是版本问题。
🍓🍓今天新建一个自然语言处理,文本分类的小项目,一般情况下我几乎是一个项目一个Anaconda内置虚拟环境。因为会有一些包的依赖,例如numpy,不同功能的包对numpy的以来版本是不一样的,我不能一个项目换一个numpy版本吧,这样也太影响我智商了吧。在创建一个新Python项目时,需要使用anaconda创建新虚拟环境。使用conda create -n aiit5 python=3命令创建。其中aiit5是为这个虚拟环境起的名字,可以随便起,满足名字组成条件即可,建议字母和数字组成。
🍓🍓对于这种情况应该是连接原因,简单点说资源在外国服务器上,过内网访问会有问题,就像你平时拿自己电脑访问外网一样,没有梯子你敢出去吗,卡死你。
简单点,网络原因。虽然我之前一直用的都是豆瓣源,但是很奇怪,突然用不了,是豆瓣源坏了吗,显然不是,好了,不唠了,直接上解决方案。
解决方法:
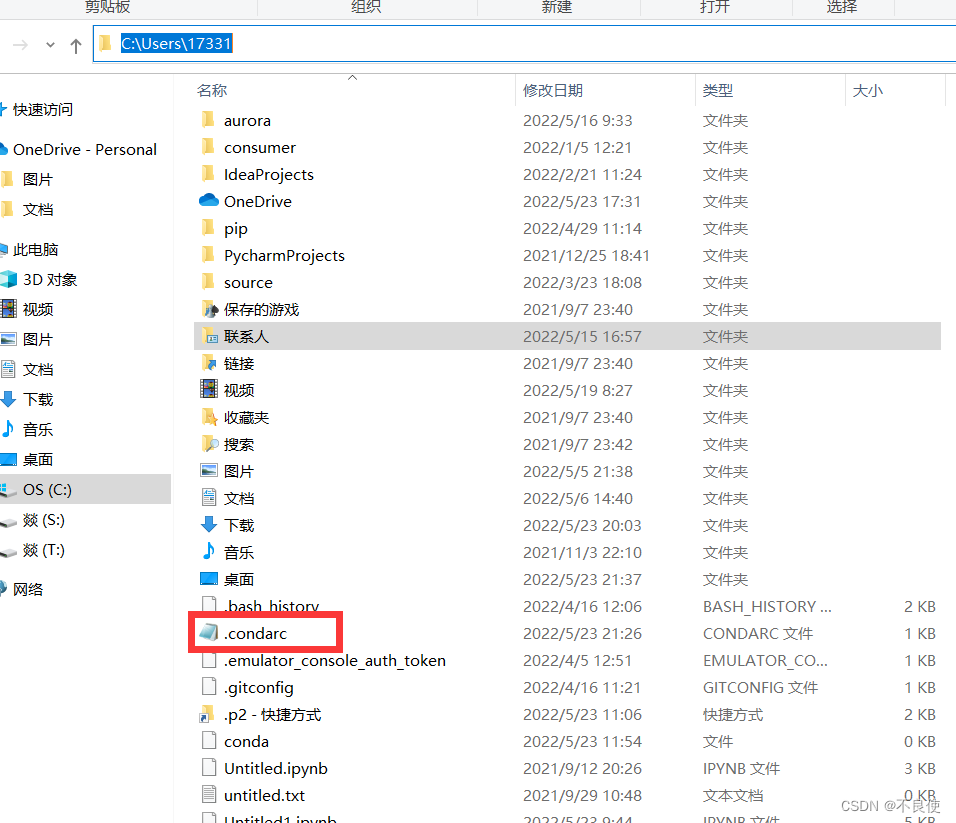
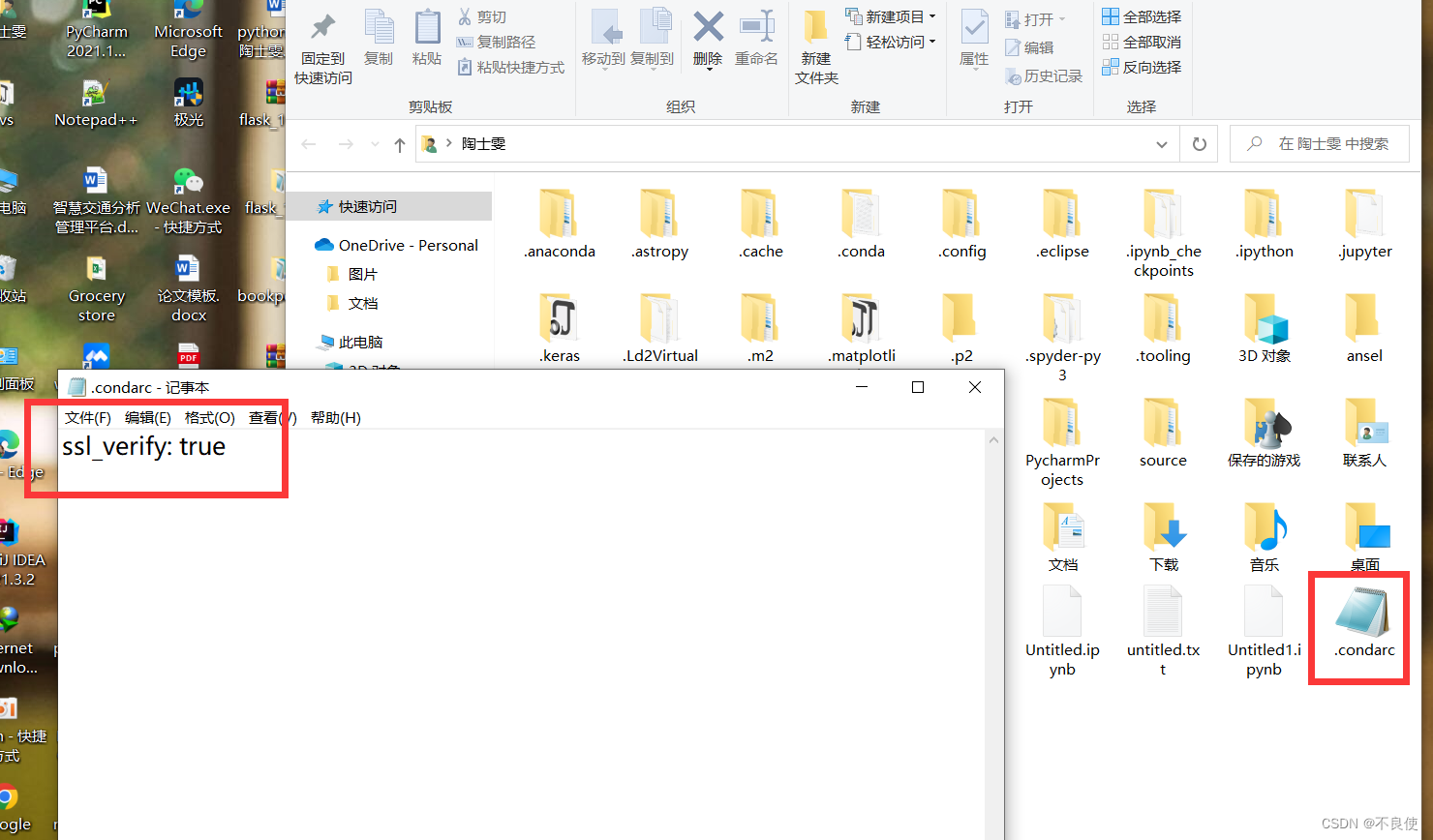
🚀🚀🚀步骤一、win+R,输入%HOMEPATH%,找到.condarc文件,以记事本方式打开。你也可以直接在磁盘中找
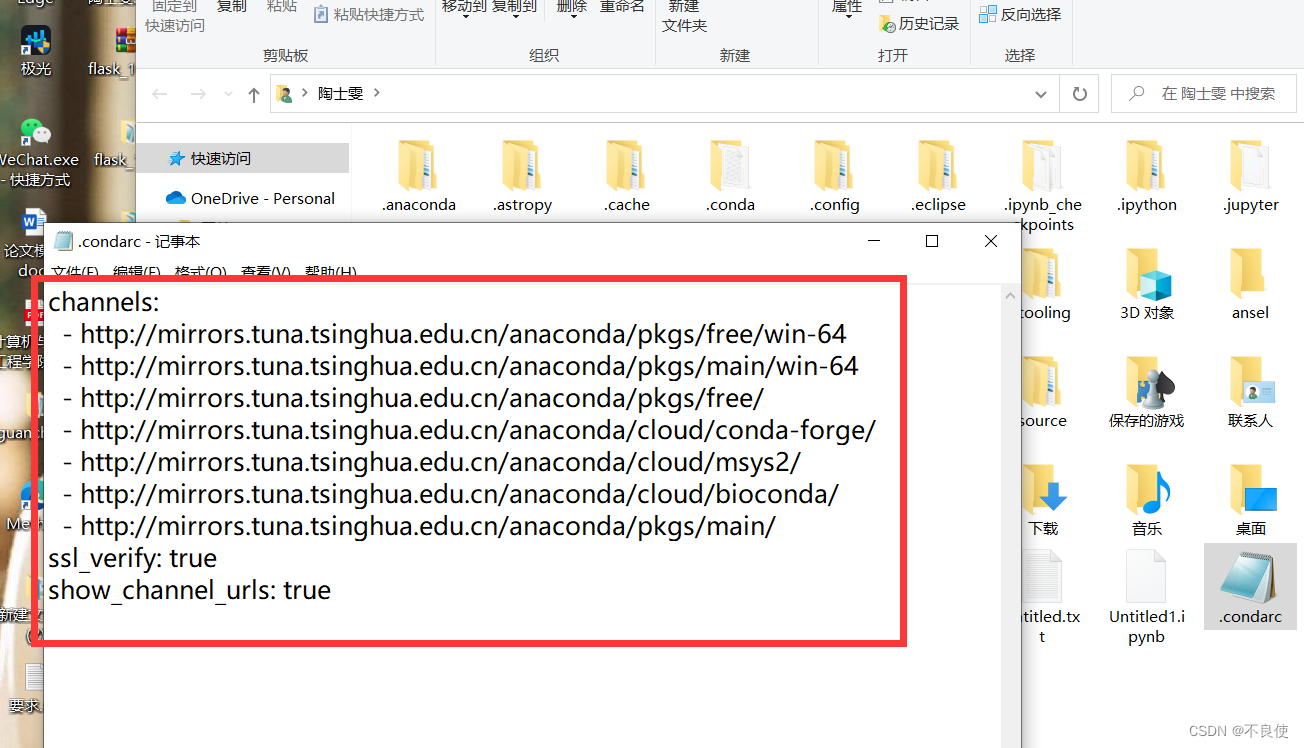
🚀🚀🚀步骤二、打开发现是空的,或者有一些其他的东西。不哦那个管,全删掉。把下面东西复制粘贴进去并同时按住 ctrl+s [保存]。
channels:
- http://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/free/win-64
- http://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/main/win-64
- http://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/free/
- http://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud/conda-forge/
- http://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud/msys2/
- http://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud/bioconda/
- http://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/main/
ssl_verify: true
show_channel_urls: true
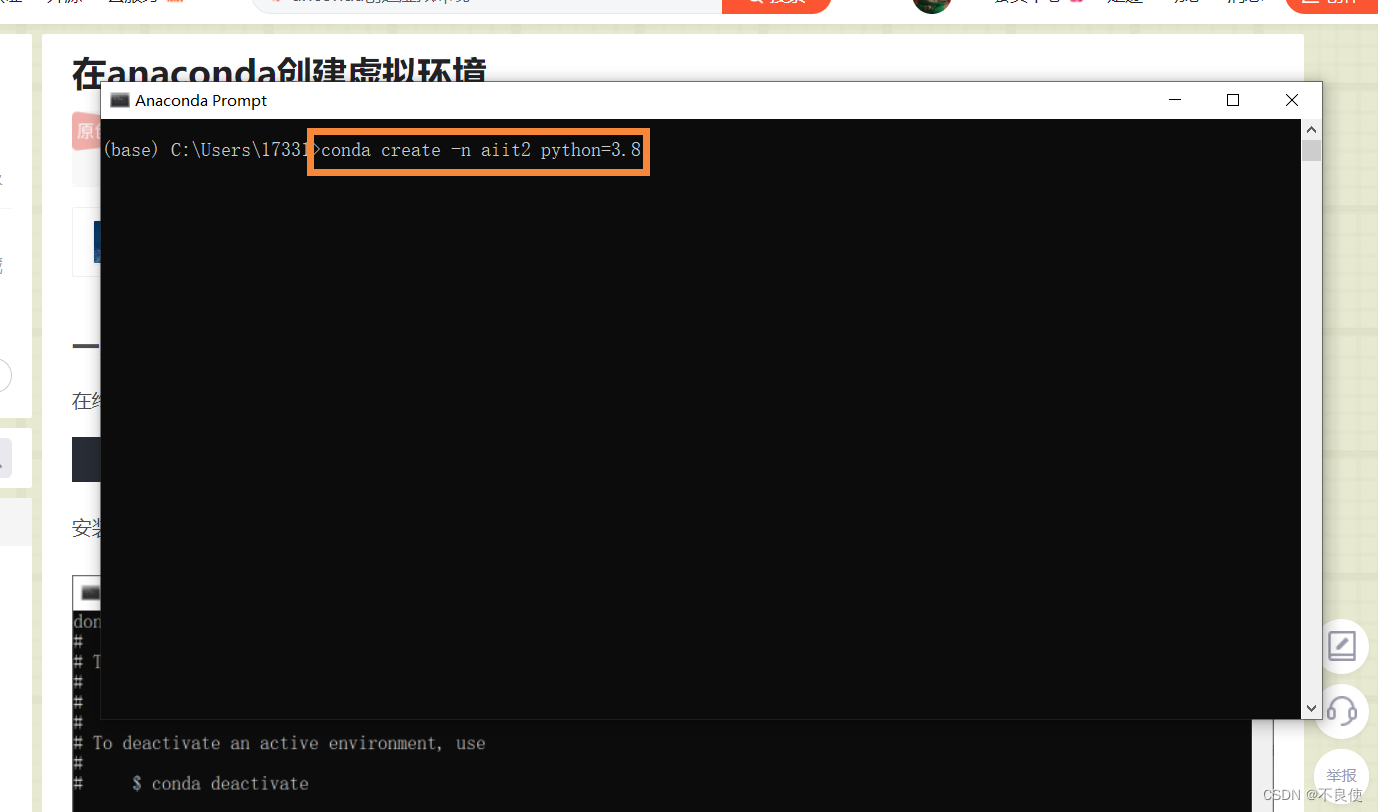
再次安装
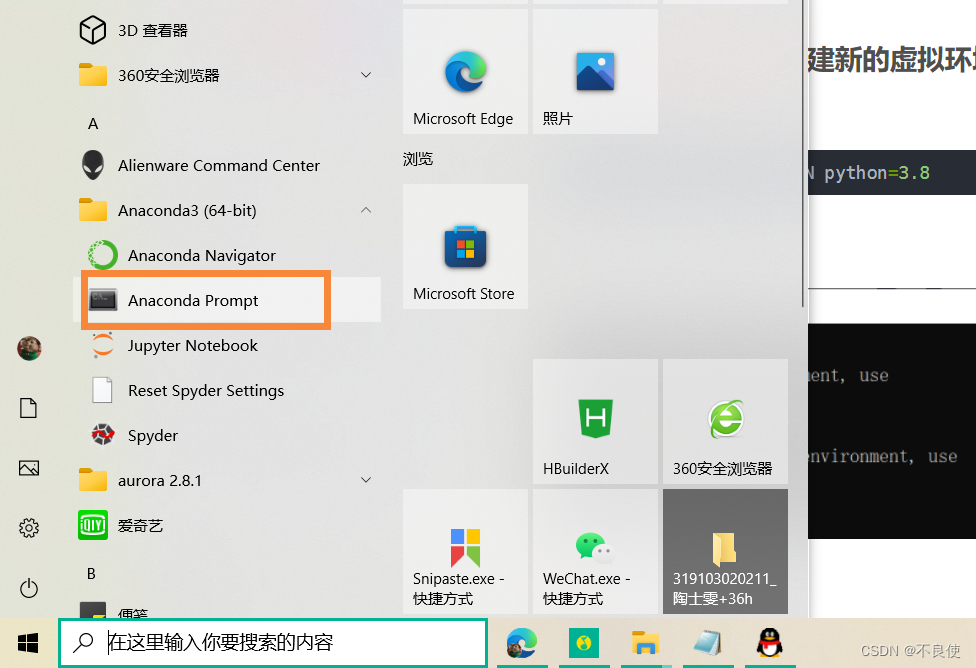
找到Anaconda Prompt并双击打开
在黑框中输入命令如下后回车:
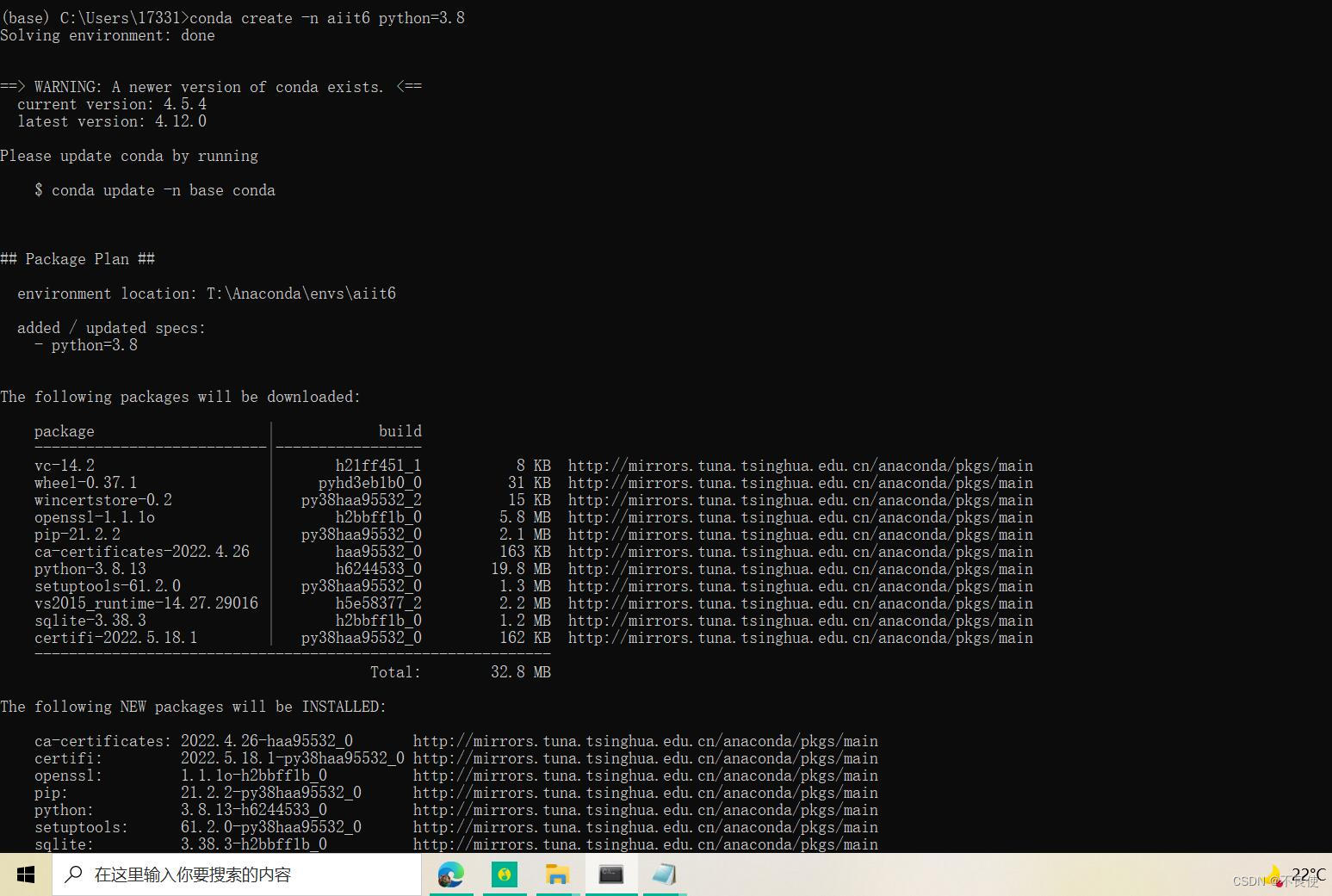
conda create -n aiit2 python=3.8
输入 y 回车,进入虚拟环境(激活虚拟环境):
conda activate aiit6
安装成功
插条广告:
在刷题之前先介绍一下牛客。Leetcode有的刷题牛客都有,除此之外牛客里面还有招聘(社招和校招)、一些上岸大厂的大佬的面试经验。
牛客是可以伴随一生的编程软件(完全免费),从学校到社会工作,时时刻刻你都可以用到,感兴趣的可以去注册试试可以伴随一生的刷题app
总结:主要就是版本源问题,默认Anconda自己的,服务器在国外,需要换自己的国内的源。按照我上面的复制粘贴即可。.condarc文件中存放的就是一些源的信息。
觉得有用的可以给个三连,关注一波!!!带你了解更多的python小知识
我的情况是。我有一个计划在ASP.NETMVC2上构建的项目。主要要求之一是SEO优化。客户希望为此项目使用以.html扩展名结尾的类静态URL,使URL对SEO更友好。例如。“mysite.com/about.html”或“mysite.com/items/getitem/5.html”等我想知道从SEO的角度来看,在动态URL中使用.html扩展名有什么好处吗?Google和其他搜索引擎对此类URL的排名是否更好? 最佳答案 我会改用站点地图,这使您能够拥有动态内容(并使用MVC),但仍会被完全抓取。参见:http://www.
一、UR机械臂的DH参数1.1UR机械臂连杆坐标系图图中红色为x轴,橘色为z轴。1.2UR机械臂的DH参数表上图中的尺寸并不是完全精准尺寸,因此下面DH参数表中尺寸是从三维模型中测量的。aia_iaiαi\alpha_iαidid_idiθi\theta_iθi10π/2\pi/2π/289.15θ1\theta_1θ12-42500θ2\theta_2θ23-392.2500θ3\theta_3θ340π/2\pi/2π/2109.15θ4\theta_4θ450−π/2-\pi/2−π/294.65θ5\theta_5θ560082.30θ6\theta_6θ6二、UR
我有一个UR5通用机器人机器人ARM和通过以太网连接的PC,我试图通过LabVIEW相互交谈(只需来回发送字符串)。我已经设法使用TCPListenVI和TCPRead函数读取从机器人到PC的通信。但是,我无法使用TCPWrite写入机器人,甚至无法使用TCPOpen连接初始化与机器人的连接。在机器人已经通过TCPListen与我的计算机建立连接但发送了0个字节后,我尝试了TCPWrite。如何使用LabVIEWTCP/IP从我的PC向机器人发送字符串?如果有人有任何在LabVIEW中使用TCP/IP的经验,我们将不胜感激。 最佳答案
我有一些用旧版本的python(2.x)编写的python代码,我很难让它工作。我正在使用python3.4_eng_word=ur"[a-zA-Z][a-zA-Z0-9'.]*"(它是分词器的一部分) 最佳答案 http://bugs.python.org/issue15096标题:放弃对“ur”字符串前缀的支持当PEP414恢复对Python3中显式Unicode文字的支持时,“ur”字符串前缀被视为“r”前缀的同义词。所以,用'r'代替'ur' 关于python3.4版不支持'ur
目录DH参数介绍 正运动学代码测试 逆运动学变换矩阵关节1的求解关节5的求解关节6的求解关节3的求解关节2的求解关节4的求解正逆解完整代码测试结果不足之处一些有用链接最近做项目需要用到UR5的逆解,在网上找资料自己实现碰到一堆坑,现在终于完美解决。本文用的是标准DH参数,包含从末端位姿变换到关节角的全部过程,网上许多教程都是用正运动学算出的变换矩阵进行逆运动学求解,在我的项目中完全没有办法应用。其中UR末端姿态有两种表示方法,这也是排查了好久才找到的问题。现在将完整过程分享出来,希望可以帮到和我遇到同样问题的小伙伴。URsim使用及安装可参考我另一篇博客URSim+Unity联合仿真以及Soc
目录DH参数介绍 正运动学代码测试 逆运动学变换矩阵关节1的求解关节5的求解关节6的求解关节3的求解关节2的求解关节4的求解正逆解完整代码测试结果不足之处一些有用链接最近做项目需要用到UR5的逆解,在网上找资料自己实现碰到一堆坑,现在终于完美解决。本文用的是标准DH参数,包含从末端位姿变换到关节角的全部过程,网上许多教程都是用正运动学算出的变换矩阵进行逆运动学求解,在我的项目中完全没有办法应用。其中UR末端姿态有两种表示方法,这也是排查了好久才找到的问题。现在将完整过程分享出来,希望可以帮到和我遇到同样问题的小伙伴。URsim使用及安装可参考我另一篇博客URSim+Unity联合仿真以及Soc
目录UR5e连接过程安装ROS安装moveit电脑端UR机器人驱动安装UR实体机器人-软件安装与通信建立urcap软件安装电脑端ip问题需要指定临时ip的情况不需指定临时ipUR机器人IP机器人的启动驱动UR机器人电脑-ip:192.168.56.1ur5e-ip:192.168.56.101环境Ubuntu20.04+Ur5e+一根网线+一个U盘安装ROS省略,网络搜索即可安装moveitsudoaptinstallros-noetic-moveit电脑端UR机器人驱动安装其实当前UR机器人的驱动不止一种,所以搜一下可以看到好几种,但是现在Universal_Robots_ROS_Drive
目录UR5e连接过程安装ROS安装moveit电脑端UR机器人驱动安装UR实体机器人-软件安装与通信建立urcap软件安装电脑端ip问题需要指定临时ip的情况不需指定临时ipUR机器人IP机器人的启动驱动UR机器人电脑-ip:192.168.56.1ur5e-ip:192.168.56.101环境Ubuntu20.04+Ur5e+一根网线+一个U盘安装ROS省略,网络搜索即可安装moveitsudoaptinstallros-noetic-moveit电脑端UR机器人驱动安装其实当前UR机器人的驱动不止一种,所以搜一下可以看到好几种,但是现在Universal_Robots_ROS_Drive
安装moveit!因为已安装好ros和Ubuntu系统为基础,就不多介绍怎么安装了。在桌面打开终端输入sudoaptinstallros-noetic-moveit运动规划库就装好了安装ur机器人的驱动mkdir-p~/catkin_ws/srccd~/catkin_ws/catkin_make上面是创建工作空间和编译编译完后记得source或直接写入bash文件里sourcedevel/setup.bash再打开终端进入工作空间进行下载驱动cd~/catkin_ws/gitclonehttps://github.com/UniversalRobots/Universal_Robots_RO
安装moveit!因为已安装好ros和Ubuntu系统为基础,就不多介绍怎么安装了。在桌面打开终端输入sudoaptinstallros-noetic-moveit运动规划库就装好了安装ur机器人的驱动mkdir-p~/catkin_ws/srccd~/catkin_ws/catkin_make上面是创建工作空间和编译编译完后记得source或直接写入bash文件里sourcedevel/setup.bash再打开终端进入工作空间进行下载驱动cd~/catkin_ws/gitclonehttps://github.com/UniversalRobots/Universal_Robots_RO