2020年TI杯大学生电子设计竞赛
坡道行驶电动小车(C题)
任务
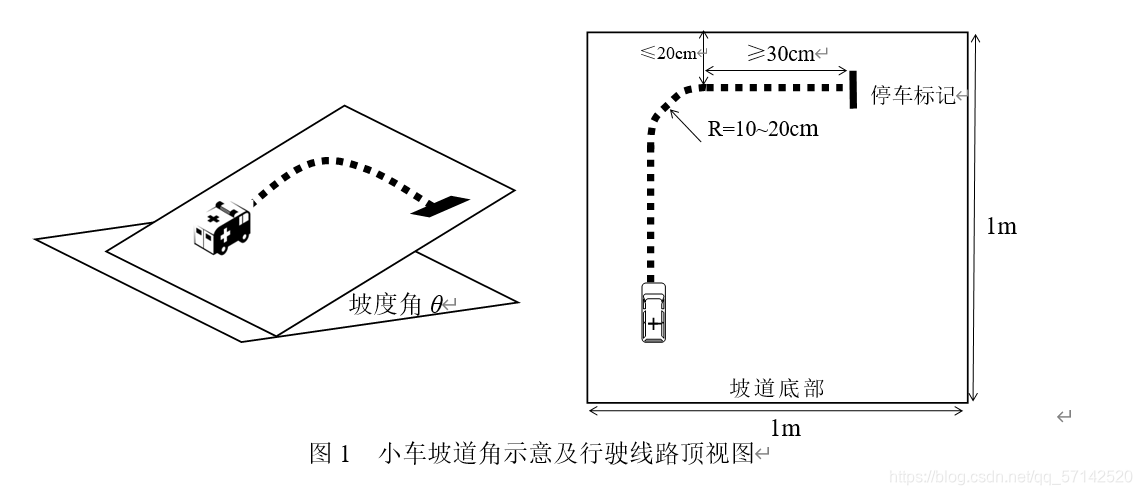
利用TI的MSP430/MSP432平台,设计制作一个四轮电动小车。要求小车能沿着指定路线在坡道上自动循迹骑线行驶。小车必须独立运行,车外不能使用任何设备(包括电源)。小车(含电池)重量小于1.5kg,外形尺寸在地面投影不大于25cm×25cm。坡道用长、宽约1m的细木工板制作,允许板上有木质本色及自然木纹。木工板表面铺设画有1cm×1cm黑白间隔的纸条(以下简称为标记线)作为路线指示;标记线起始段为直线,平行于木板两边;标记线在坡顶转向90°,转弯半径20cm;标记线平行坡顶距离≥30cm,距坡顶距离≤20cm;标记线总长度为1m。停车标记为宽1cm长5cm的黑色线条,垂直于坡顶标记线。小车坡度角示意及行驶线路顶视图如图1所示。
要求
| 项 目 | 主要内容 | 满分 |
| 方案论证 | 比较与选择,方案描述 | 3 |
| 理论分析与计算 | 系统相关参数设计 | 5 |
| 电路与程序设计 | 系统组成,原理框图与各部分的电路图,系统软件与流程图 | 5 |
| 测试方案与测试结果 | 测试结果完整性,测试结果分析 | 5 |
| 设计报告结构及规范性 | 摘要,正文结构规范,图表的完整与准确性。 | 2 |
| 总分 | 20 | |
说明
第一次发博客,以及第一次坐智能小车,可能有很多瑕疵和不足。一、项目时间:2022.11.19~11.22二、实现效果:小车进行循迹行驶三、使用模块:STM32F103RCT6核心板*1L298N电机驱动模块*2TCRT5000L五路红外循迹传感器模块*1DC3V-6V黄色直流减速电机-TT*4锂电池组电源12V*2OLED屏幕-四针*1LM2596降压模块(新款DC-DC可调稳压电源模块)*1DC-DC12V装3.3v5v12v电源模块 四、基础使用方式:OLED显示循迹模块反馈状态【例如:10001】电机驱动1【采用左右轮倒转实现拐弯】电机驱动2【1块控制左轮,一块控制右轮】循迹模式【转角力
电动势,是导体内电子运动的必要条件,也是电子运动趋势的一种表现,因而具有一定的方向性。电动势的方向,规定为从电源的负极,经过电源内部指向电源的正极,即与电源两端电压的方向相反。反电动势,是指由反抗电流发生改变的趋势而产生电动势。反电动势一般出现在电磁线圈中,如继电器线圈、电磁阀、接触器线圈、电动机、电感等。对于电动机产品,定子部分是电能的输入端,而转子部分则是电机做功的输出端;通过定子部分输入的电能,一部分用于转子部分做功,另一部分则会消耗于线路内阻,以及其他损耗。转子部分产生的反电动势,即电动机做功的要素。反电动势消耗了电路中的电能,但它并不是一种“损耗”,与反电动势对应的那部分电能,将转
基于51单片机的遥控小车(HC-05模块,L298n模块)保姆级1.硬件准备2.部分硬件说明USB转TTL模块可以把串口发送的TTL信号转换成USB信号再发送给电脑,电脑就可以接收到单片机发送过来的信号并在上位机(串口调试助手)上显示出来。大部分单片机都可以使用串口的方式通过相应的上位机软件来下载程序,但是电脑的USB出来的信号是USB信号,单片机是无法识别USB信号的,需要通过USB转TTL模块把USB信号转换成TTL信号才能将程序下载到单片机中。接线说明GND端接入51单片机GND端RXD端接入51单片机TXD端TXD端接入51单片机RXD端5V0端接入51单片机5V端口(有些5V0端可能
我在项目中使用StreetViewJavascriptApi,我了解如何使用航向使Google的全景图指向北方。现在,我还获取了创建此全景图的所有图block,并使用它们创建了360°原始全景图图像。但是,我想知道是否有一种方法可以在创建的原始全景图中自动找出北方的位置。例如, 最佳答案 有直接的解决方案吗?据我所知,GoogleMapsAPI和特别是全景View没有像您在帖子中那样在图像的北部和/或南部有箭头的界面。这样的解决方案必须由您手动编码才能弄清楚。解决方法但是,您可以使用一种解决方法,它利用全景View并且在界面中有一个
目录一.功能介绍及硬件准备二.电机控制及调速三.小车循迹方案四.跟随功能实现五.测速功能实现六.OLED显示车速七.摇头避障功能实现八.SU-03T语音模块介绍九.语音切换小车模式+OLED显示模式一.功能介绍及硬件准备这是一款基于51单片机开发的智能小车,通过这篇文章我会记录下来开发这款小车的全部过程。这款小车集成了循迹,避障,跟随,语音切换模式选择,并且将可以将车速显示到OLED屏幕上,也可以通过手机app蓝牙操控小车。(注:全文的代码采取分文件编程的写法)硬件准备小车底盘一个(两驱),5号4节电池盒一个,51单片机最小系统一个,HC04超声波模块一个,SG90舵机一个,红外避障模块传感器
我有数据框中两个点的纬度和经度。我在R中使用下面的代码来获取行驶距离。library(XML)library(RCurl)latlon2ft但我收到以下错误。ErrorinxpathApply(xmlfile,"//distance")[[1]]:subscriptoutofbounds3xmlChildren(xpathApply(xmlfile,"//distance")[[1]])2xmlValue(xmlChildren(xpathApply(xmlfile,"//distance")[[1]])$value)1latlon2ft(test[i,"origin1"],test[
我正在尝试在给定纬度/经度的情况下获取两点之间的行驶距离。我可以手动将它们放入谷歌地图并获得行驶距离,但我想以编程方式完成所有这些工作。我想JavaScript是合适的语言。但是,我不懂JavaScript,而且我对R的使用相当熟悉。我更愿意在R中进行,因为我在R中进行所有数据分析。我正在寻找沿路的距离,而不是乌鸦飞行距离。经过几个小时的尝试,我在R中编写了以下函数(This和thisone帮助)。您是否有任何更好的方法来在此函数内或任何非常非常简单的方法中获取距离?library(XML)latlon2ft结果=17224.41 最佳答案
代码地址:基于峰谷分时电价电动汽车调度-遗传算法MATLAB程序_分时电价需求响应matlab-电子商务文档类资源-CSDN文库参考文献基于峰谷分时电价引导下的电动汽车充电负荷优化_欧名勇2020主要内容利用蒙特卡洛方法对2种不同充电方式进行模拟并对其进行分析;分析用户响应度对电动汽车有序充电的影响,建立峰谷分时电价对电动汽车负荷影响的模型,在模拟出电动汽车无序充电负荷的基础上,用实际案例对模型进行验证,利用多目标优化遗传算法进行求解,验证峰谷分时电价对电网负荷优化的有效性。部分程序forrun=1:no_runs %%原始种群 xl_temp=repmat(xl,pop_size,1
大家好,我是张巧龙,今天给大家继续带来电赛F题的分享:智能送药小车。今天这个车也获得了全国一等奖,这次获奖队伍和上次获奖队伍,都是我赛前指导的学生做的。上次的文章链接:做个全国一等奖的小车,其实不难(F题:智能送药小车方案分享)赛前我带了比较多学生专门做控制题,我带的学生还有2组获得了全国二等奖,由于获奖规则的名额限制,每个学校最多2个国一,2个国二。我们学校今年在F题取得了满额指标,其实我觉得2个国二获奖队伍也可以拿国一,奈何规则限制。当然,组委会定的规则非常合理,必须让更多学校参与并获奖。闲话不多说,先看展示视频:01 方案设计通过分析赛题可知,单个智能送药小车首先在药房处识别病房号,等
最近打算自己完成一个无人驾驶汽车仿真运行的项目,因此记录一下过程,希望能帮助到需要搭建ROS仿真环境的人,主要参考了冰达机器人的课程,在B站上也有相关视频可以学习实现过程1.创建工作区2.gazebo绘制地图,并保存为.world文件3.urdf小车模型和xacro小车模型4.ros运行地图和小车模型5.查看传感器数据一、创建工作区mkdir-p~/catkin_ws/src/tutorials//创建文件夹cd~/catkin_ws/src/tutorialsmkdirlaunch//存放launch文件mkdirurdf//存放小车模型文件mkdirworld//存放地图文件一个简单的工作