ROS2的前身是ROS,ROS即机器人操作系统(Robot Operating System)。但是ROS本身并不是一个操作系统,而是一个软件库和工具集。
Ros的出现解决了机器人各个组件的通信问题,后来越来越多的机器人算法也集成到了ROS中,ROS2继承了ROS,相比ROS更强大更优秀。
ROS的设计目的:简化在各种机器人平台上创建复杂而强大的机器人行为的任务即不重复造造论子,即实现某一个功能时,可以直接使用现成或者进行改造。
在ROS之前,让机器人的各个部分协调通信起来是一件非常复杂的事情。例如一个简单的机器人包含感知(深度相机及传感器等)、决策(算法部分)、控制(硬件驱动)三大部分。ROS使上面几个部分合理的连接在了一起。
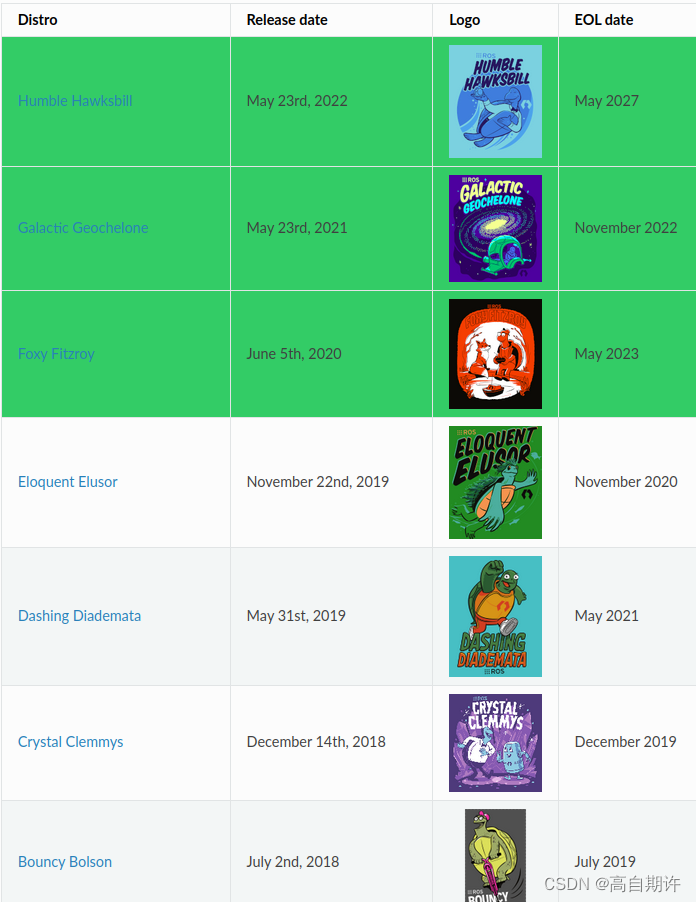
下图是ROS2的部分版本历史。
ROS为简化机器人开发设计了一整套通信机制(话题、服务、参数、动作)。通过这套机制可以将机器人的各个组件连接起来。这套机制设计了一个叫做Ros Master的节点,其他所有组件的通信必须经过该主节点,一旦主节点挂掉,将会导致整个机器人系统通信崩溃!所以不能利用Ros的不稳定性不能用来做一些类似于自动驾驶等一些高风险的机器人。此外还有以下缺点:
1、基于TCP实现的通信、实时性差,系统开销大
2、对python3支持不友好
3、消息机制不兼容
4、无加密机制,安全性不高
ROS2首先去掉了ROS中存在的主节点。去掉主节点之后,各个节点之间可以通过DDS的节点相互发现,各个节点都是平等的,可以实现一对一、一对多、多对多进行互相通信。采用DDS进行通信之后,可靠性和稳定性都有了增强。
相比于ROS只支持Linux系统,ROS2还支持windows,mac,甚至RTOS平台;
Region是HBase数据管理的基本单位,region有一点像关系型数据的分区。region中存储这用户的真实数据,而为了管理这些数据,HBase使用了RegionSever来管理region。Region的结构hbaseregion的大小设置默认情况下,每个Table起初只有一个Region,随着数据的不断写入,Region会自动进行拆分。刚拆分时,两个子Region都位于当前的RegionServer,但处于负载均衡的考虑,HMaster有可能会将某个Region转移给其他的RegionServer。RegionSplit时机:当1个region中的某个Store下所有StoreFile
昨晚看到IDEA官推宣布IntelliJIDEA2023.1正式发布了。简单看了一下,发现这次的新版本包含了许多改进,进一步优化了用户体验,提高了便捷性。至于是否升级最新版本完全是个人意愿,如果觉得新版本没有让自己感兴趣的改进,完全就不用升级,影响不大。软件的版本迭代非常正常,正确看待即可,不持续改进就会慢慢被淘汰!根据官方介绍:IntelliJIDEA2023.1针对新的用户界面进行了大量重构,这些改进都是基于收到的宝贵反馈而实现的。官方还实施了性能增强措施,使得Maven导入更快,并且在打开项目时IDE功能更早地可用。由于后台提交检查,新版本提供了简化的提交流程。IntelliJIDEA
介绍pytest是一个非常成熟的全功能的Python测试框架,主要有以下几个特点:简单灵活,容易上手支持参数化能够支持简单的单元测试和复杂的功能测试,还可以用来做selenium/appnium等自动化测试、接口自动化测试(pytest+requests)pytest具有很多第三方插件,并且可以自定义扩展,比较好用的如pytest-selenium(集成selenium)、pytest-html(完美html测试报告生成)、pytest-rerunfailures(失败case重复执行)、pytest-xdist(多CPU分发)等测试用例的skip和xfail处理可以很好的和jenkins集成
📝学技术、更要掌握学习的方法,一起学习,让进步发生👩🏻作者:一只IT攻城狮。💐学习建议:1、养成习惯,学习java的任何一个技术,都可以先去官网先看看,更准确、更专业。💐学习建议:2、然后记住每个技术最关键的特性(通常一句话或者几个字),从主线入手,由浅入深学习。❤️《SpringCloud入门实战系列》解锁SpringCloud主流组件入门应用及关键特性。带你了解SpringCloud主流组件,是如何一战解决微服务诸多难题的。项目demo:源码地址👉🏻SpringCloud入门实战系列不迷路👈🏻:SpringCloud入门实战(一)什么是SpringCloud?SpringCloud入门实战
文章目录一,什么是kaliPurle(卡利紫)二,如何安装kaliPurple。(有步骤没图片直接是默认)1,复制它的下载链接到迅雷可以让你下镜像变得更快。2,打开你的虚拟机创建新的虚拟机3,点击后面浏览然后找到镜像的所在地选中确定,下一步4,这里默认就可以,因为Ubuntu和这个差不多架构。5,然后,名字自己改一下,然后把他安到你想要装的盘,容量默认。之后一直下一步就可以**6,打开它,然后第一个图形界面安装,直接回车,然后选中文点continue之后没有图片的直接点继续。7,密码想设什么设什么。然后一直继续到我的图片那里改一下就可以了。8,软件默认就行。9,耐心等待。然后点手动配置dvc然
目录简介ROS诞生背景ROS的设计目标ROS与ROS2安装ROS1.配置ubuntu的软件和更新2.设置安装源3.设置key4.安装5.配置环境变量安装可能出现的问题安装构建依赖卸载ROS架构1.设计者2.维护者3.立足系统架构:ROS可以划分为三层ROS通信机制话题通信理论模型流程通信样例自定义消息的通信服务通信理论模型服务通信自定义srv参数服务器理论模型参数操作常用命令简介rosnoderostopicrosmsgrosservicerossrvrosparam常用API初始化话题与服务相关对象C++回旋函数C++对比时间1.时刻2.持续时间3.持续时间与时刻运算4.设置运行频率(非常常
目录关于MPU6050芯片关于小板关于厂家和DATASHEET关于漂移关于角加速度还是角速度关于精度和量程(可调,可选)关于功耗,陀螺仪+加速器工作电流:3.8mA(全功率,陀螺仪在所有速率下,在1kHz采样率下加速)采样率高,功耗也高可以参考 MPU6050陀螺仪与Processing和匿名上位机飞控联动实录-知乎关于MPU6050芯片MPU6050传感器模块是6轴运动跟踪设备。包含3轴陀螺仪、3轴加速度计、运动处理器、温度传感器。I2C总线接口,可与微控制器进行通信。通过辅助I2C总线与其他传感器设备通信,如3轴磁力计、压力传感器等。如果3轴磁力计连接到辅助I2C总线,则MPU6050可
MySQL为您提供了一个有用的字符串函数REPLACE(),它允许您用新的字符串替换表的列中的字符串。REPLACE()函数的语法如下:REPLACE(str,old_string,new_string);SQLREPLACE()函数有三个参数,它将string中的old_string替换为new_string字符串。注意:有一个也叫作REPLACE的语句用于插入或更新数据。所以不要将REPLACE语句与这里的REPLACE字符串函数混淆。REPLACE()函数非常方便搜索和替换表中的文本,例如更新过时的URL,纠正拼写错误等。在UPDATE语句中使用REPLACE函数的语法如下:UPDATE
ROS学习笔记(八):ROS2ROS1存在的问题ROS2ROS2的设计目标ROS2的系统架构ROS2的关键中间件——DDSROS2的通信模型ROS1存在的问题ROS(一般ROS均指ROS1)经过多年的发展,已成为机器人领域的重要的工具与平台。但是ROS1主要存在以下问题:(1)ROS1无法适用于多机器人系统。(2)ROS1基于Linux系统,在Windows、macOS和RTOS上无法应用或功能有限。(3)ROS1缺少实时性方面的设计。(4)ROS1的分布式机制需要良好的网络环境才能保证数据的完整性,而且网络不具备数据加密、安全防护等功能。(5)ROS1的稳定性不好,ROSMaster和节点有
SM4为分组对称密码算法,明文、密文以及密钥长度均为128128128bits。SM4算法主要包括加解密算法和密钥扩展算法,采用323232轮非线性迭代的数学结构,其中算法中每一次迭代运算为一轮非线性变换。主要操作包括异或、合成置换、非线性迭代、反序变换、循环移位以及S盒变换等。加密算法和解密算法的数学架构、运算法则、运算操作等都是完全相同的,解密运算只需要将加密算法中生成的轮密钥进行反序使用。其流程图如下图所示。图1.SM4密码算法加密流程图密钥扩展算法 设加密主密钥MK=(MK0,MK1,MK2,MK3)MK=(MK_0,MK_1,MK_2,MK_3)MK=(MK0,MK1,MK