总体感觉测量平差这门课还是不是很容易,需要比较深刻的理解概念还要会相关的推导,比如精密度精确度准确度粗值观测值平差值等。
主体内容就是间接平差,条件平差。在这两者基础之上,间接平差参数选择比较多,就出现附有限制条件的间接平差。如果条件平差又有参数,就称作附有参数的条件平差 。然后是误差椭圆,分析误差分布规律的,哪里误差大,哪里误差小。最后为了评定平差结果或者精度的好坏,又有一部分参数检验和假设检验的内容,不过基本都是概率论的内容,比如U检验,T检验等,所以还是需要熟悉一些参数的构造。
给出误差分类的表达式,粗差、系统误差和偶然误差的定义。
系统误差:在相同的观测条件下作一系列的观测,如果误差在大小、符号上表现出系统性,或者在观测过程中按一定的规律变化,或者为某一常数,那么,这种误差称为系统误差。简言之,符合函数规律的误差称为系统误差。
偶然误差:在相同的观测条件下作一系列的观测,如果误差在大小和符号上都表现出偶然性,即从单个误差看,该列误差的大小和符号没有规律性,但就大量误差的总体而言,具有一定的统计规律,这种误差称为偶然误差。简言之,符合统计规律的误差称为偶然误差。
误差来源:来源于测量仪器,观测者,外界条件
这部分其实很简单,就是将需要计算方差的量与已知协因数阵的量建立联系,然后根据公式求
D
Z
Y
=
K
D
X
X
F
T
D_{ZY}=KD_{XX}F^T
DZY=KDXXFT
这个公式如果看不懂就没救了,赶紧复习吧。
水准
σ
h
A
B
=
n
σ
0
(
σ
0
为每一站的中误差
)
\sigma _{h_{AB}}=\sqrt{n}\sigma _0\left( \sigma _0\text{为每一站的中误差} \right)
σhAB=nσ0(σ0为每一站的中误差)
注意:地势平坦时 n 换成 S \text{注意:地势平坦时}\sqrt{n}\text{换成}\sqrt{S} 注意:地势平坦时n换成S
同精度观测值的算数平均数的精度??自己想想
代数角度
V
T
P
V
=
min
V^TPV=\min
VTPV=min
(其中,V为观测值的改正数向量);
概率角度:结合正态分布的最大似然估计进行求解
由于观测值个数多于必要观测数,产生了多余观测,因此会有额外的条件进行列立方程式。方程式个数即为多余观测数,r=n-t。
有已知水准点的水准网中,必要观测数为未知点数;在没有已知水准点的水准网中,必要观测数为全部网点数减1。
基本条件:图形条件,圆周条件,极条件(固定角条件,固定边条件);
图形条件:内角和的条件,如三角形内角和为180°等。
圆周条件:又称水平条件,即围绕一中心点的各角之和为360°。
极条件:从一已知边出发,经过不同路径到达另一已知边,理论上结果应该相同。
应用场景有大地四边形,中点多边形等;
具体方法:角度闭合法,即由测得的边长结合三角形的正余弦条件,推算出角度与边长的关系,进而求得角度改正数与边长改正数的联系,得到角度改正数方程:
V
a
=
ρ
′
′
(
V
S
a
−
cos
C
V
S
b
−
cos
B
V
S
c
)
/
h
a
V_a=\rho ^{''}\left( V_{S_a}-\cos CV_{S_b}-\cos BV_{S_c} \right) /h_a
Va=ρ′′(VSa−cosCVSb−cosBVSc)/ha
对于单一附和导线,要测定一个未知点坐标,必须要测得一条导线边和一个水平角,则若有n-1个未知点,必要观测数t=2(n-1);总观测值数为n条边长和n+1个水平角共2n+1个,则多余观测恒为3个,故单一附和导线中只有3个条件方程。
闭合差的协因数阵?联系向量的协因数阵,改正数的协因数阵,观测值的平差值的谐因数阵,都记得吗?
点击确定n,t,u。根据集合关系,列出
V
=
B
x
^
−
L
V=B\hat{x}-L
V=Bx^−L
勇最小二乘原理求解
V
T
P
V
=
min
V^TPV=\min
VTPV=min
B T P V = 0 B^TPV=0 BTPV=0
N B B x ^ = W N_{BB}\hat{x}=W NBBx^=W
x ^ = ( B T P B ) − 1 B T P L \hat{x}=\left( B^TPB \right) ^{-1}B^TPL x^=(BTPB)−1BTPL
这些公式记得吗?
1:间接平差的计算步骤
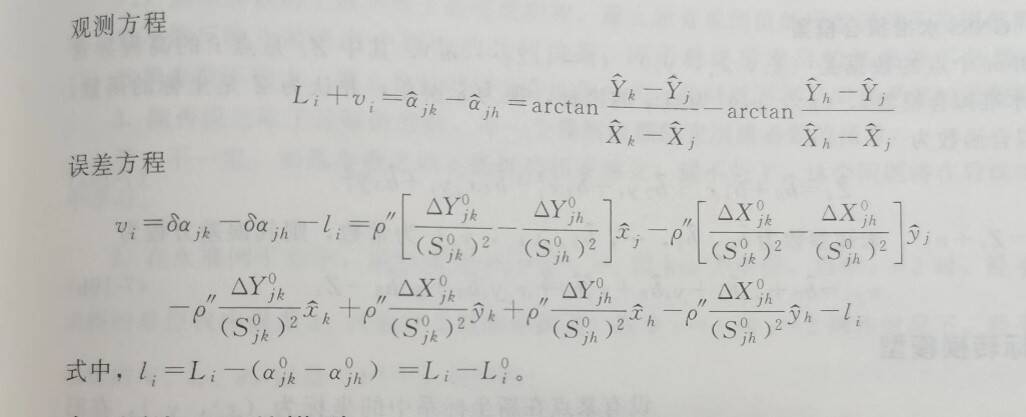
2:测方向的三角网模型
3:测角网的函数模型(尤其是反正切的线性化)
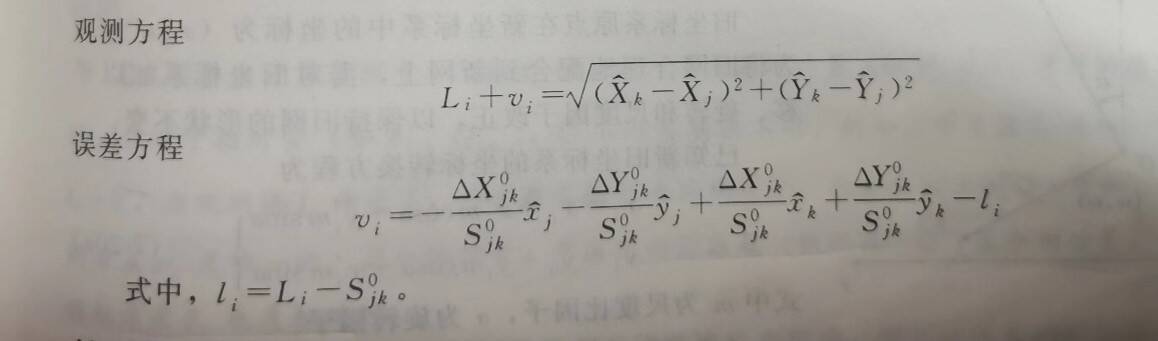
4:测边网的函数模型(根号的正向化)
模型
A
V
+
B
x
−
W
=
0
AV+Bx-W=0
AV+Bx−W=0
D = σ 0 2 Q = σ 0 2 P − 1 D=\sigma _{0}^{2}Q=\sigma _{0}^{2}P^{-1} D=σ02Q=σ02P−1
法方程
N
a
a
K
+
B
x
^
−
W
=
0
N_{aa}K+B\hat{x}-W=0
NaaK+Bx^−W=0
B T K = 0 B^TK=0 BTK=0
解
K
=
N
a
a
−
1
(
W
−
B
x
^
)
K=N_{aa}^{-1}\left( W-B\hat{x} \right)
K=Naa−1(W−Bx^)
x ^ = N b b − 1 B T N a a − 1 W \hat{x}=N_{bb}^{-1}B^TN_{aa}^{-1}W x^=Nbb−1BTNaa−1W
函数模型
V
=
B
x
^
−
L
V=B\hat{x}-L
V=Bx^−L
C x ^ + W x = 0 C\hat{x}+W_x=0 Cx^+Wx=0
法方程
N
b
b
x
^
+
C
T
K
s
−
W
=
0
N_{bb}\hat{x}+C^TK_s-W=0
Nbbx^+CTKs−W=0
C x ^ − W x = 0 C\hat{x}-W_x=0 Cx^−Wx=0
联系向量
K
s
=
N
c
c
−
1
(
C
N
b
b
−
1
W
+
W
x
)
K_s=N_{cc}^{-1}\left( CN_{bb}^{-1}W+W_x \right)
Ks=Ncc−1(CNbb−1W+Wx)
N c c = C N b b − 1 C T N_{cc}=CN_{bb}^{-1}C^T Ncc=CNbb−1CT
误差椭圆的三个参数:长半轴,短半轴,长半轴或者短半轴的方向
点位误差曲线:以极大值方向与极小值方向的交点为极点,极大值方向为极轴,以坐标北为起算的角为极角变量,相应方向的中误差为极径变量。最后形成一个封闭曲线
点位方差计算公式
σ
P
2
=
σ
X
2
+
σ
Y
2
\sigma _P^2=\sigma _{X}^{2}+\sigma _{Y}^{2}
σP2=σX2+σY2
任意方向的位差公式
σ
φ
2
=
σ
0
2
(
Q
x
x
cos
2
φ
+
Q
y
y
sin
2
φ
+
Q
x
y
sin
2
φ
)
\sigma _{\varphi}^{2}=\sigma _{0}^{2}\left( Q_{xx}\cos ^2\varphi +Q_{yy}\sin ^2\varphi +Q_{xy}\sin 2\varphi \right)
σφ2=σ02(Qxxcos2φ+Qyysin2φ+Qxysin2φ)
极大值E,极小值F的判断方法
tan
2
φ
0
=
2
Q
x
y
Q
x
x
−
Q
x
y
,
(
φ
0
为极值方向
)
\tan 2\varphi _0=\frac{2Q_{xy}}{Q_{xx}-Q_{xy}}\text{,}\left( \varphi _0\text{为极值方向} \right)
tan2φ0=Qxx−Qxy2Qxy,(φ0为极值方向)
重要的计算公式
$$
K=\sqrt{\left( Q_{xx}-Q_{xy} \right) 2+4Q_{xy}2}
$$
$$
E 2 = 1 2 σ 0 2 [ ( Q x x + Q y y ) + K ] E^2=\frac{1}{2}\sigma _0^2\left[ \left( Q_{xx}+Q_{yy} \right) +K \right] E2=21σ02[(Qxx+Qyy)+K]
F 2 = 1 2 σ 0 2 [ ( Q x x + Q y y ) − K ] F^2=\frac{1}{2}\sigma _0^2\left[ \left( Q_{xx}+Q_{yy} \right) -K \right] F2=21σ02[(Qxx+Qyy)−K]
σ p 2 = E 2 + F 2 \sigma _{p}^{2}=E^2+F^2 σp2=E2+F2
SPI接收数据左移一位问题目录SPI接收数据左移一位问题一、问题描述二、问题分析三、探究原理四、经验总结最近在工作在学习调试SPI的过程中遇到一个问题——接收数据整体向左移了一位(1bit)。SPI数据收发是数据交换,因此接收数据时从第二个字节开始才是有效数据,也就是数据整体向右移一个字节(1byte)。请教前辈之后也没有得到解决,通过在网上查阅前人经验终于解决问题,所以写一个避坑经验总结。实际背景:MCU与一款芯片使用spi通信,MCU作为主机,芯片作为从机。这款芯片采用的是它规定的六线SPI,多了两根线:RDY和INT,这样从机就可以主动请求主机给主机发送数据了。一、问题描述根据从机芯片手
因为我现在正在做一些时间测量,我想知道是否可以在不使用Benchmark类或命令行实用程序time的情况下测量用户时间或系统时间。使用Time类只显示挂钟时间,而不显示系统和用户时间,但是我正在寻找具有相同灵active的解决方案,例如time=TimeUtility.now#somecodeuser,system,real=TimeUtility.now-time原因是我有点不喜欢Benchmark,因为它不能只返回数字(编辑:我错了-它可以。请参阅下面的答案。)。当然,我可以解析输出,但感觉不对。*NIX系统的time实用程序也应该可以解决我的问题,但我想知道是否已经在Ruby中实
按照目前的情况,这个问题不适合我们的问答形式。我们希望答案得到事实、引用或专业知识的支持,但这个问题可能会引发辩论、争论、投票或扩展讨论。如果您觉得这个问题可以改进并可能重新打开,visitthehelpcenter指导。关闭9年前。我最近开始学习Ruby,这是我的第一门编程语言。我对语法感到满意,并且我已经完成了许多只教授相同基础知识的教程。我已经写了一些小程序(包括我自己的数组排序方法,在有人告诉我谷歌“冒泡排序”之前我认为它非常聪明),但我觉得我需要尝试更大更难的东西来理解更多关于Ruby.关于如何执行此操作的任何想法?
文章目录一、项目场景二、基本模块原理与调试方法分析——信源部分:三、信号处理部分和显示部分:四、基本的通信链路搭建:四、特殊模块:interpretedMATLABfunction:五、总结和坑点提醒一、项目场景 最近一个任务是使用simulink搭建一个MIMO串扰消除的链路,并用实际收到的数据进行测试,在搭建的过程中也遇到了不少的问题(当然这比vivado里面的debug好不知道多少倍)。准备趁着这个机会,先以一个很基本的通信链路对simulink基础和相关的debug方法进行总结。 在本篇中,主要记录simulink的基本原理和基本的SISO通信传输链路(QPSK方式),计划在下篇记
我编写了一个非常简单的Sassmixin,用于将像素值转换为rem值(请参阅JonathanSnook的articleonthebenefitsofusingrems)。这是代码://MixinCode$base_font_size:10;//10px@mixinrem($key,$px){#{$key}:#{$px}px;#{$key}:#{$px/$base_font_size}rem;}//Includesyntaxp{@includerem(font-size,14);}//RenderedCSSp{font-size:14px;font-size:1.4rem;}这个mixi
【动态规划】一、背包问题1.背包问题总结1)动规四部曲:2)递推公式总结:3)遍历顺序总结:2.01背包1)二维dp数组代码实现2)一维dp数组代码实现3.完全背包代码实现4.多重背包代码实现一、背包问题1.背包问题总结暴力的解法是指数级别的时间复杂度。进而才需要动态规划的解法来进行优化!背包问题是动态规划(DynamicPlanning)里的非常重要的一部分,关于几种常见的背包,其关系如下:在解决背包问题的时候,我们通常都是按照如下五部来逐步分析,把这五部都搞透了,算是对动规来理解深入了。1)动规四部曲:(1)确定dp数组及其下标的含义(2)确定递推公式(3)dp数组的初始化(4)确定遍历顺
Asitcurrentlystands,thisquestionisnotagoodfitforourQ&Aformat.Weexpectanswerstobesupportedbyfacts,references,orexpertise,butthisquestionwilllikelysolicitdebate,arguments,polling,orextendeddiscussion.Ifyoufeelthatthisquestioncanbeimprovedandpossiblyreopened,visitthehelpcenter提供指导。已关闭8年。什么是学习ruby语言
关闭。这个问题不符合StackOverflowguidelines.它目前不接受答案。我们不允许提问寻求书籍、工具、软件库等的推荐。您可以编辑问题,以便用事实和引用来回答。关闭7年前。Improvethisquestion我正在努力寻找一套好的工具来实现我的个人网站。必须具备:网站或其生成器必须基于Ruby必须易于部署和维护拥有的美好:它应该在排版上干净漂亮它应该具有html5/css3功能我正在考虑直接使用Rails3,但它似乎有点过分了。编辑内容将是作品集和博客的混合体。你们ruby在用什么?效果好吗?
我正在寻找一种方法来衡量我的cucumber步骤的执行时间。使用junit格式,我设法获得了一些有关功能和场景执行时间的数据,但我还想查看场景中步骤的时间。 最佳答案 cucumber--formatusage“打印使用步骤定义的地方。首先列出最慢的步骤定义(带有持续时间)。” 关于ruby-如何测量cucumber步骤的执行时间,我们在StackOverflow上找到一个类似的问题: https://stackoverflow.com/questions/7
1,Camera基本工作原理答案:光线通过镜头Lens进入摄像头内部,然后经过IRFilter过滤红外光,最后到达sensor(传感器),senor分为按照材质可以分为CMOS和CCD两种,可以将光学信号转换为电信号,再通过内部的ADC电路转换为数字信号,然后传输给DSP(如果有的话,如果没有则以DVP的方式传送数据到基带芯片baseband,此时的数据格式RawData,后面有讲进行加工)加工处理,转换成RGB、YUV等格式输出。数据流是如何从sensor到APP的?上述描述结束后,在ISP处理后面的阶段,数据会进行分流,分为capture,preview,video等以供后续动作使用。例如