utils专栏不会细讲概念性的内容,偏向实际使用,如有问题,欢迎留言。如果对你有帮助就点个赞哈,也不搞什么粉丝可见有的没的,有帮助点个赞就ok
混淆矩阵 对于混淆矩阵的计算,这个我们直接从sklearn.metrics导入confusion_matrix计算,只需要向其中传递两个参数,一个是y_true,一个是y_pred,就可以直接得到混淆矩阵了:
from sklearn.metrics import confusion_matrix
confMatrix = confusion_matrix(label, pre)这个是随便拿了个数据集,加载了预训练参数,跑了1轮的混淆矩阵:

准确率、F1和召回率的计算我们直接使用混淆矩阵来计算,混淆矩阵可以帮助我们很好的获得以下每类的数目:
准确率:
精确率:
召回率:
F1:
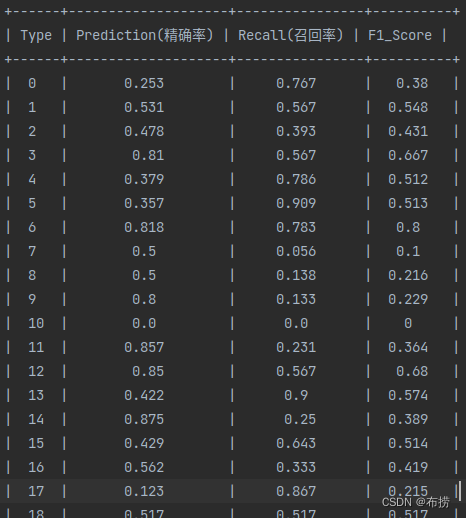
相关的理论部分这里不过介绍,直接上代码实现,最后返回的是总的精确率、总的召回率、总的F1_score、一个图表可视化和一个几何平均,可以根据自己的需要来调整代码,比如只需要某一类的召回率等等:
注:使用图标可视化精确率、召回率和F1时,请先:
import prettytabledef calculate_prediction_recall(label, pre, classes=None):
"""
计算准确率和召回率:传入预测值及对应的真实标签计算
:param label:标签
:param pre:对应的预测值
:param classes:类别名(None则为数字代替)
:return:
"""
if classes:
classes = list(range(classes))
# print(classes)
confMatrix = confusion_matrix(label, pre)
print(confMatrix)
total_prediction = 0
total_recall = 0
result_table = prettytable.PrettyTable()
class_multi = 1
result_table.field_names = ['Type', 'Prediction(精确率)', 'Recall(召回率)', 'F1_Score']
for i in range(len(confMatrix)):
label_total_sum_col = confMatrix.sum(axis=0)[i]
label_total_sum_row = confMatrix.sum(axis=1)[i]
if label_total_sum_col: # 防止除0
prediction = confMatrix[i][i] / label_total_sum_col
else:
prediction = 0
if label_total_sum_row:
recall = confMatrix[i][i] / label_total_sum_row
else:
recall = 0
if (prediction + recall) != 0:
F1_score = prediction * recall * 2 / (prediction + recall)
else:
F1_score = 0
result_table.add_row([classes[i], np.round(prediction, 3), np.round(recall, 3),
np.round(F1_score, 3)])
total_prediction += prediction
total_recall += recall
class_multi *= prediction
total_prediction = total_prediction / len(confMatrix)
total_recall = total_recall / len(confMatrix)
total_F1_score = total_prediction * total_recall * 2 / (total_prediction + total_recall)
geometric_mean = pow(class_multi, 1 / len(confMatrix))
return total_prediction, total_recall, total_F1_score, result_table, geometric_mean, confMatrix图标可视化的一个结果展示(注意:图标显示的是每一类的准确率、召回率和F1,函数返回的是总的准确率、召回率和F1,可以根据自己的需要进行修改代码):
没什么好说的,直接上代码:
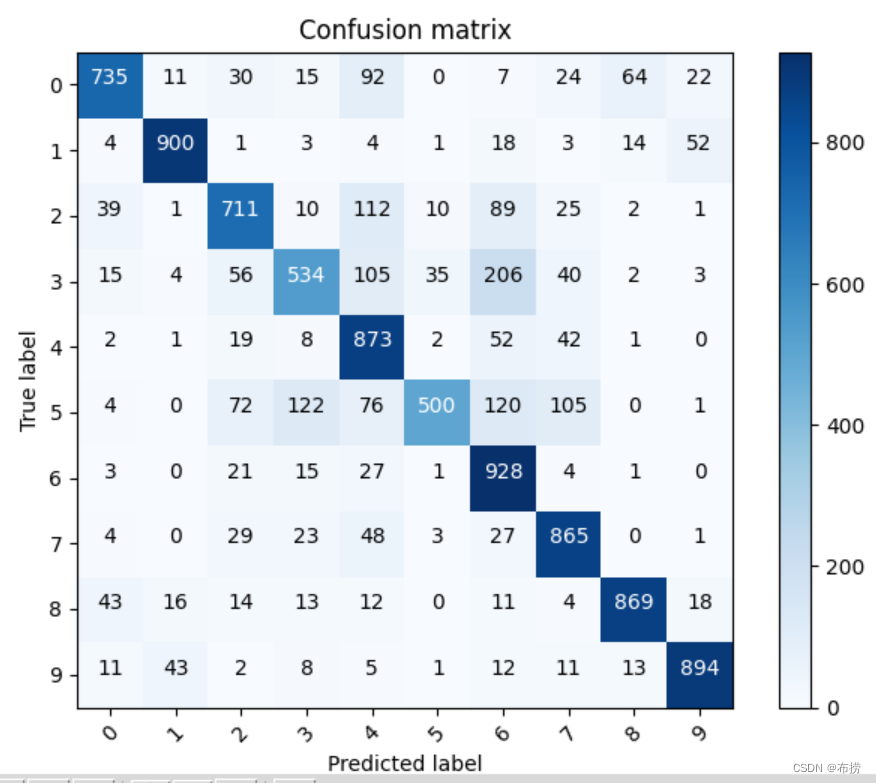
def plot_confusion_matrix(cm, classes, normalize=False, title='Confusion matrix', cmap=plt.cm.Blues):
"""
混淆矩阵的可视化: 传入混淆矩阵和类别名(或数字代替)
:param cm: 混淆矩阵
:param classes: 类别
:param normalize:
:param title:
:param cmap:
:return:
"""
if normalize:
cm = cm.astype('float') / cm.sum(axis=1)[:, np.newaxis]
print("Normalized confusion matrix")
else:
print('Confusion matrix, without normalization')
plt.imshow(cm, interpolation='nearest', cmap=cmap)
plt.title(title)
plt.colorbar()
tick_marks = np.arange(len(classes))
plt.xticks(tick_marks, classes, rotation=45)
plt.yticks(tick_marks, classes)
fmt = '.2f' if normalize else 'd'
thresh = cm.max() / 2.
for i, j in itertools.product(range(cm.shape[0]), range(cm.shape[1])):
plt.text(j, i, format(cm[i, j], fmt), horizontalalignment="center", color="white" if cm[i, j] > thresh else "black")
plt.tight_layout()
plt.ylabel('True label')
plt.xlabel('Predicted label')
plt.savefig('runs/picture/confMatrix.jpg')
plt.show()结果展示:
我即将开始一个将录制和编辑音频文件的项目,我正在寻找一个好的库(最好是Ruby,但会考虑Java或.NET以外的任何库)以进行实时可视化波形。有人知道我应该从哪里开始搜索吗? 最佳答案 要流入浏览器的数据量很大。Flash或Flex图表可能是唯一能提高内存效率的解决方案。Javascript图表往往会因大型数据集而崩溃。 关于ruby-Ruby中的波形可视化,我们在StackOverflow上找到一个类似的问题: https://stackoverflow.c
点向量坐标矩阵的几何意义介绍旋转矩阵的几何含义之前,先介绍一下点向量坐标矩阵的几何含义点:在一维空间下就是一个标量,如同一条直线上,以任意某一个位置为0点,以一定的尺度间隔为1,2,3...,相反方向为-1,-2,-3...;如此就形成了一维坐标系,这时候任何一个点都可以用一个数值表示,如点p1=5,即即从原点出发沿着x轴正方向移动5个尺度;点p2=-3,负方向移动3个尺度; 在一维坐标系上过原点做垂直于一维坐标系的直线,则形成了二维坐标系,此时描述一个点需要两个数值来表示点p3=(3,2),即从原点出发沿着x轴正方向移动3个尺度,在此基础上沿着y轴正方向移动两个尺度的位置就是点p3。
我在Ruby中遇到了一个关于Dir[]和File.join()的简单程序,blobs_dir='/path/to/dir'Dir[File.join(blobs_dir,"**","*")].eachdo|file|FileUtils.rm_rf(file)ifFile.symlink?(file)我有两个困惑:首先,File.join(@blobs_dir,"**","*")中的第二个和第三个参数是什么意思?其次,Dir[]在Ruby中有什么用?我只知道它等价于Dir.glob(),但是,我对Dir.glob()确实不是很清楚。 最佳答案
所有题目均有五种语言实现。C实现目录、C++实现目录、Python实现目录、Java实现目录、JavaScript实现目录题目n行m列的矩阵,每个位置上有一个元素你可以上下左右行走,代价是前后两个位置元素值差的绝对值.另外,你最多可以使用一次传送阵(只能从一个数跳到另外一个相同的数)求从走上角走到右下角最少需要多少时间。输入描述:第一行两个整数n,m,分别代表矩阵的行和列。后面n行,每行m个整数,分别代表矩阵中的元素。输出描述:一个整数,表示最少需要多少时间。
请有人帮助我了解ruby应用程序如何管理应用程序的gemfile和rvmgemsets。如果我当前使用的是Gemset,安装了一堆gem,并且我的gemfile中也有gems,那么Ruby应用程序是使用gemfile中的gem还是应用程序的gemset中的gem? 最佳答案 要理解这一点,您需要退后一步,了解rubygems的一般工作原理。让我们从一个没有rvm或Gemfile的系统开始。当您通过“geminstall”安装gem时,它会进入系统gem位置。每当您编写ruby脚本并需要gem时,它就会从那里获取。现在假设
一、习惯约定图片来自PSINS(高精度捷联惯导算法)PSINS工具箱入门与详解.pptx二、基本旋转矩阵绕x轴逆时钟旋转α\alphaα角度Rx(α)=[ 1000cosαsinα0−sinαcosα]R_x(\alpha)=\begin{bmatrix}\1&0&0\\0&\cos\alpha&\sin\alpha\\0&-\sin\alpha&\cos\alpha\end{bmatrix}Rx(α)= 1000cosα−sinα0sinαcosα绕y轴逆时钟旋转α\alphaα角度Ry(α)=[ cosα0−sinα010sinα0cosα]R_y(\alpha
欧拉角、旋转矩阵及四元数1.简介2.欧拉角2.1欧拉角定义2.2右手系和左手系2.3转换流程3.旋转矩阵4.四元数4.1四元数与欧拉角和旋转矩阵之间等效变换4.2测试Matlab代码5.总结1.简介常用姿态参数表达方式包括方向余弦矩阵、欧拉轴/角参数、欧拉角、四元数以及罗德里格参数等。高分辨率光学遥感卫星主要采用欧拉角与四元数对姿态参数进行描述。这里着重讲解欧拉角、旋转矩阵和四元数。2.欧拉角2.1欧拉角定义欧拉角是表征刚体旋转的一种方法之一,由莱昂哈德·欧拉引入的三个角度,用于描述刚体相对于固定坐标系的方向。在摄影测量、空间科学或其它技术领域,一般用一组(三个)欧拉角描述两个空间坐标之间的旋
Unity数据可视化图表插件XCharts3.0发布历时8个多月,业余时间,断断续续,XCharts3.0总算发布了。如果要打个满意度,我给3.0版本来个80分。对于代码框架结构设计的调整改动,基本符合预期,甚是满意。相比之前的1.0和2.0版本,我认为3.0才是一个拿得出手给广大开发者使用的版本。1.0发布的时候,很兴奋,从0.1到1.0,也磨了一年,真的等不及想给大家试用了,还特地写过一篇文章以示庆祝。那个时候,1.0虽然还还不够完善,功能也不够丰富,但它是XCharts的开始,没有1.0,也就没有后面的2.0和3.0。后面的2.0发布,做了很多改进和优化,随着版本迭代,慢慢的发现有不少硬
本人是音乐爱好者,从小就特别喜欢那个随着音乐跳动的方框效果,就是这个:arduino上一大把对,我忍你很久了,我就想用mpy做,全网没有,行我自己研究。果然兴趣是最好的老师,我之前有篇博客专门讲音频,有兴趣的可以回顾一下。提到可视化频谱,必然绕不开fft,大学学过这玩意,当时一心玩,老师讲的一个字都么听进去,网上教程简略扫了一下,大该就是把时域转频域的工具,我大mpy居然没有fft函数,奶奶的,先放着。音频信息如何收集?第一种傻瓜式的ADC,模拟转数字,原始粗暴,第二种,I2S库,我之前博客有讲过,数据是PCM编码。然后又去学PCM编码,一学豁然开朗,舒服,以代码为例:audio_in=I2S
我以前在Laravel4上工作过,它有一个很棒的日志查看器工具laravellogviewer查看demo我正在寻找与Rubyonrails4.2非常相似的东西,如果你们知道Rails4.2的任何好的可视化日志记录GEM,请告诉我..从代码我需要记录不同的日志级别,这个工具应该直观地组织我的日志,谢谢.. 最佳答案 这应该可以帮助您入门https://github.com/shadabahmed/logstasher如其所说Thisgemisheavilyinspiredfromlograge,butit'sfocusedonone