文章目录
由于在平时总是或多或少的遇到平移旋转的问题,每次都是现查资料,然后查了忘,忘了继续查,这次弄明白之后干脆写一篇文章,给人方便同时于己方便,后续如有扩充或变动也方便添加。
假设有两个向量 a 1 = ( x 1 , y 1 , z 1 ) a_1 = (x_1, y_1, z_1) a1=(x1,y1,z1)和 a 2 = ( x 2 , y 2 , z 2 ) a_2 = (x_2, y_2, z_2) a2=(x2,y2,z2),它们的转换关系为:
a
1
=
R
∗
a
2
+
T
a_1 = R * a_2 + T
a1=R∗a2+T
这里
R
R
R就是它的旋转矩阵,
T
T
T就是它的平移矩阵。使用齐次方式表示如下:
(
a
1
1
)
=
(
R
T
0
1
)
∗
(
a
2
1
)
\begin{pmatrix} a_1\\ 1 \end{pmatrix}= \begin{pmatrix} R&T\\ 0&1 \end{pmatrix}* \begin{pmatrix} a_2\\1 \end{pmatrix}
(a11)=(R0T1)∗(a21)
使用元素值替换后,表示如下:
(
x
1
y
1
z
1
1
)
=
(
r
11
r
12
r
13
t
1
r
21
r
22
r
23
t
2
r
31
r
32
r
33
t
3
0
0
0
1
)
∗
(
x
2
y
3
z
2
1
)
\begin{pmatrix} x_1\\y_1\\z_1\\1 \end{pmatrix}= \begin{pmatrix} r_{11}&r_{12}&r_{13}&t_{1}\\ r_{21}&r_{22}&r_{23}&t_{2}\\ r_{31}&r_{32}&r_{33}&t_{3}\\ 0&0&0&1 \end{pmatrix}* \begin{pmatrix} x_2\\y_3\\z_2\\1 \end{pmatrix}
x1y1z11
=
r11r21r310r12r22r320r13r23r330t1t2t31
∗
x2y3z21
在仿射变换中的转换矩阵表示先线性变换再平移。在这里转换矩阵表示如下:
转换矩阵
=
(
r
11
r
12
r
13
t
1
r
21
r
22
r
23
t
2
r
31
r
32
r
33
t
3
0
0
0
1
)
转换矩阵= \begin{pmatrix} r_{11}&r_{12}&r_{13}&t_{1}\\ r_{21}&r_{22}&r_{23}&t_{2}\\ r_{31}&r_{32}&r_{33}&t_{3}\\ 0&0&0&1 \end{pmatrix}
转换矩阵=
r11r21r310r12r22r320r13r23r330t1t2t31
平移矩阵表示如下:
平移矩阵
T
=
(
t
1
t
2
t
3
)
平移矩阵T=\begin{pmatrix} t_{1}\\ t_{2}\\ t_{3}\\ \end{pmatrix}
平移矩阵T=
t1t2t3
旋转矩阵表示如下:
旋转矩阵
R
=
(
r
11
r
12
r
13
r
21
r
22
r
23
r
31
r
32
r
33
)
旋转矩阵R=\begin{pmatrix} r_{11}&r_{12}&r_{13}\\ r_{21}&r_{22}&r_{23}\\ r_{31}&r_{32}&r_{33} \end{pmatrix}
旋转矩阵R=
r11r21r31r12r22r32r13r23r33
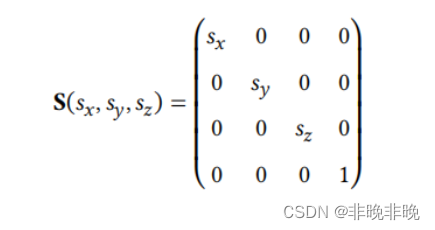
如果理解以上知识点之后,缩放变换、平移变换和旋转变换的特殊情况也迎刃而解。
缩放变换只是在尺度上进行改变,所以它的变换形式如下:
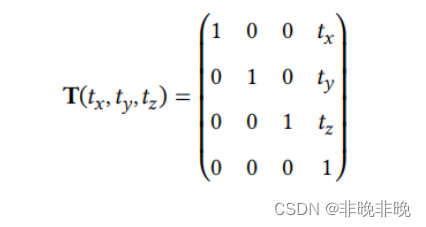
平移变换的时候,角度不发生改变,也就是旋转矩阵R为单位矩阵,所以它的变换形式如下:
当空间内的物体绕着 x 轴,y 轴或者 z 轴旋转的时候,变换矩阵为:
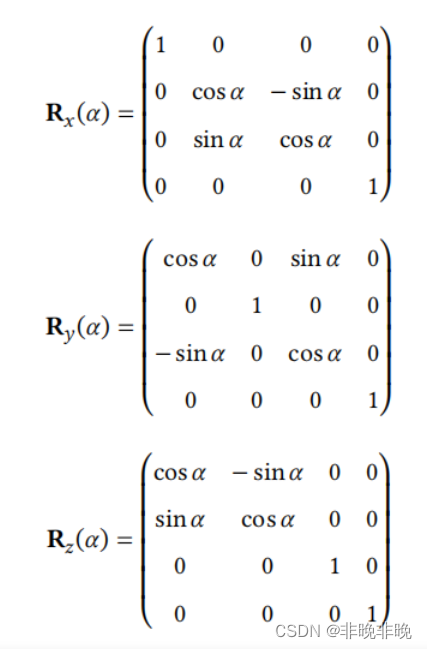
对于一般性的旋转问题,可以用简单的旋转描述复杂的旋转。用 x 轴,y 轴和 z 轴上的旋转来定义旋转:

这三个角就被称作欧拉角(Euler angles)。
在应用中,我们往往会遇到旋转矩阵、四元数和欧拉角之间的互相转换,在这里,我们只使用python代码来实现它们之间互相转换。
from scipy.spatial.transform import Rotation as R
def quaternion2euler(quaternion):
r = R.from_quat(quaternion)
euler = r.as_euler('xyz', degrees=True)
return euler
def euler2quaternion(euler):
r = R.from_euler('xyz', euler, degrees=True)
quaternion = r.as_quat()
return quaternion
def euler2rotation(euler):
r = R.from_euler('xyz', euler, degrees=True)
rotation_matrix = r.as_matrix()
return rotation_matrix
def quaternion2rotation_matrix(quaternion):
r = R.from_quat(quaternion)
rotation_matrix = r.as_matrix()
return rotation_matrix
def rotation_matrix2euler(rotation_matrix):
r = R.from_matrix(rotation_matrix)
euler = r.as_euler('xyz', degrees=True)
return euler
def rotation_matrix2quaternion(rotation_matrix):
r = R.from_matrix(rotation_matrix)
quaternion = r.as_quat()
return quaternion
if __name__ == '__main__':
# 四元数=>欧拉角
quaternion = [0.71934025092983234, -1.876085535681999e-06, -3.274841213980097e-08, -0.69465790385533299]
euler = quaternion2euler(quaternion) # [-9.20000743e+01 1.52039496e-04 -1.52039496e-04]
print(f'euler: {euler}')
# 四元数=>旋转矩阵
rotation_matrix = quaternion2rotation_matrix(quaternion)
print(f'rotation_matrix: {rotation_matrix}')
# 欧拉角=>四元数
quaternion = euler2quaternion(euler)
print(f'quaternion: {quaternion}') # [-7.19340251e-01 1.87608554e-06 3.27484122e-08 6.94657904e-01]
# 欧拉角=>旋转矩阵
rotation_matrix = euler2rotation(euler)
print(f'rotation_matrix: {rotation_matrix}')
# 旋转矩阵=>欧拉角
euler = rotation_matrix2euler(rotation_matrix)
print(f'euler: {euler}')
# 旋转矩阵=>四元数
quaternion = rotation_matrix2quaternion(rotation_matrix)
print(f'quaternion: {quaternion}')
我的目标是转换表单输入,例如“100兆字节”或“1GB”,并将其转换为我可以存储在数据库中的文件大小(以千字节为单位)。目前,我有这个:defquota_convert@regex=/([0-9]+)(.*)s/@sizes=%w{kilobytemegabytegigabyte}m=self.quota.match(@regex)if@sizes.include?m[2]eval("self.quota=#{m[1]}.#{m[2]}")endend这有效,但前提是输入是倍数(“gigabytes”,而不是“gigabyte”)并且由于使用了eval看起来疯狂不安全。所以,功能正常,
关闭。这个问题是opinion-based.它目前不接受答案。想要改进这个问题?更新问题,以便editingthispost可以用事实和引用来回答它.关闭4年前。Improvethisquestion我想在固定时间创建一系列低音和高音调的哔哔声。例如:在150毫秒时发出高音调的蜂鸣声在151毫秒时发出低音调的蜂鸣声200毫秒时发出低音调的蜂鸣声250毫秒的高音调蜂鸣声有没有办法在Ruby或Python中做到这一点?我真的不在乎输出编码是什么(.wav、.mp3、.ogg等等),但我确实想创建一个输出文件。
我想将html转换为纯文本。不过,我不想只删除标签,我想智能地保留尽可能多的格式。为插入换行符标签,检测段落并格式化它们等。输入非常简单,通常是格式良好的html(不是整个文档,只是一堆内容,通常没有anchor或图像)。我可以将几个正则表达式放在一起,让我达到80%,但我认为可能有一些现有的解决方案更智能。 最佳答案 首先,不要尝试为此使用正则表达式。很有可能你会想出一个脆弱/脆弱的解决方案,它会随着HTML的变化而崩溃,或者很难管理和维护。您可以使用Nokogiri快速解析HTML并提取文本:require'nokogiri'h
我正在使用的第三方API的文档状态:"[O]urAPIonlyacceptspaddedBase64encodedstrings."什么是“填充的Base64编码字符串”以及如何在Ruby中生成它们。下面的代码是我第一次尝试创建转换为Base64的JSON格式数据。xa=Base64.encode64(a.to_json) 最佳答案 他们说的padding其实就是Base64本身的一部分。它是末尾的“=”和“==”。Base64将3个字节的数据包编码为4个编码字符。所以如果你的输入数据有长度n和n%3=1=>"=="末尾用于填充n%
我需要读入一个包含数字列表的文件。此代码读取文件并将其放入二维数组中。现在我需要获取数组中所有数字的平均值,但我需要将数组的内容更改为int。有什么想法可以将to_i方法放在哪里吗?ClassTerraindefinitializefile_name@input=IO.readlines(file_name)#readinfile@size=@input[0].to_i@land=[@size]x=1whilex 最佳答案 只需将数组映射为整数:@land边注如果你想得到一条线的平均值,你可以这样做:values=@input[x]
这道题是thisquestion的逆题.给定一个散列,每个键都有一个数组,例如{[:a,:b,:c]=>1,[:a,:b,:d]=>2,[:a,:e]=>3,[:f]=>4,}将其转换为嵌套哈希的最佳方法是什么{:a=>{:b=>{:c=>1,:d=>2},:e=>3,},:f=>4,} 最佳答案 这是一个迭代的解决方案,递归的解决方案留给读者作为练习:defconvert(h={})ret={}h.eachdo|k,v|node=retk[0..-2].each{|x|node[x]||={};node=node[x]}node[
我正在使用Rails构建一个简单的聊天应用程序。当用户输入url时,我希望将其输出为html链接(即“url”)。我想知道在Ruby中是否有任何库或众所周知的方法可以做到这一点。如果没有,我有一些不错的正则表达式示例代码可以使用... 最佳答案 查看auto_linkRails提供的辅助方法。这会将所有URL和电子邮件地址变成可点击的链接(htmlanchor标记)。这是文档中的代码示例。auto_link("Gotohttp://www.rubyonrails.organdsayhellotodavid@loudthinking.
我收到格式为的回复#我需要将其转换为哈希值(针对活跃商家)。目前我正在遍历变量并执行此操作:response.instance_variables.eachdo|r|my_hash.merge!(r.to_s.delete("@").intern=>response.instance_eval(r.to_s.delete("@")))end这有效,它将生成{:first="charlie",:last=>"kelly"},但它似乎有点hacky和不稳定。有更好的方法吗?编辑:我刚刚意识到我可以使用instance_variable_get作为该等式的第二部分,但这仍然是主要问题。
我的问题的一个例子是体育游戏。一场体育比赛有两支球队,一支主队和一支客队。我的事件记录模型如下:classTeam"Team"has_one:away_team,:class_name=>"Team"end我希望能够通过游戏访问一个团队,例如:Game.find(1).home_team但我收到一个单元化常量错误:Game::team。谁能告诉我我做错了什么?谢谢, 最佳答案 如果Gamehas_one:team那么Rails假设您的teams表有一个game_id列。不过,您想要的是games表有一个team_id列,在这种情况下
这个问题在这里已经有了答案:关闭10年前。PossibleDuplicate:Pythonconditionalassignmentoperator对于这样一个简单的问题表示歉意,但是谷歌搜索||=并不是很有帮助;)Python中是否有与Ruby和Perl中的||=语句等效的语句?例如:foo="hey"foo||="what"#assignfooifit'sundefined#fooisstill"hey"bar||="yeah"#baris"yeah"另外,类似这样的东西的通用术语是什么?条件分配是我的第一个猜测,但Wikipediapage跟我想的不太一样。