文章目录
本人一枚软件编程人员,有一定C语言基础,目前自学STM32单片机,写下此篇一巩固所学二交流分享。
按照惯例,先介绍理论再实战上手,穿插习题,最后给出我的愚见。
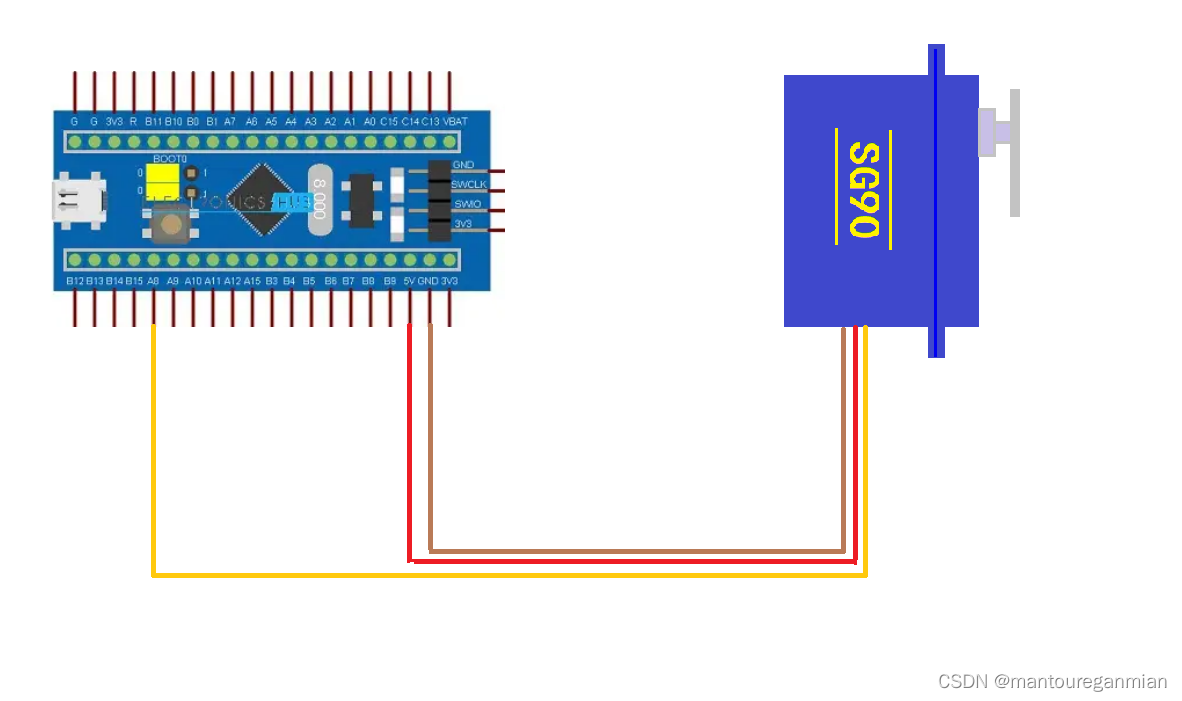
SG90属于一种舵机,最适合小白入门,可直接由单片机驱动。另外,单片机中给我们封装了很多东西,所以有些地方,读者只要记住就好,不理解的地方,不要寻根究底,你就默认单片机底层给你实现了某项功能就好,不用在意其实现基础细节原理。
这篇理论讲的很浅显,是为了让大家容易看懂。
舵机一般可以再0-180度或0-360度转动任意角度,经常用于小车小船转向控制和机械臂的关节等。舵机的转动角度范围不是固定的,请购买时问问商家,到底是哪个范围的。实际使用中,我们对舵机有两个基本需求:
机器如何给舵机发送其转动角度呢?首先,要低成本,信号线要少。其次,要满足任意角度和中途打断。设计者推出了一个简单的方法:用一个时长为20ms的信号去控制舵机,信号的前一段为高电平,持续时间0.5ms到2.5ms,代表转动角度0-180或者360度,后半段为低电平,这就是PWM信号,具体如下图:
容易看出来,PWM信号利用前段为高电平持续时间控制旋转角度,本质用占空比控制了旋转角度。
运转时,舵机转到你指定的角度需要一定的时间,转动的角度越大,需要的时间越久,所以你可能需要等待一定的时间。如果你刚刚给舵机发送指令转到180度,紧接着又发送指令转到90度,舵机会不转到180度再转到90度,而是在接受到信号时直接在当前的角度直接转到90度去。
习题110. 如果2.5ms为90度,那么36度的PWM信号是高电平时间长度是?
习题111. 为什么是PWM控制舵机,有没有其他的方法?
习题112. PWM信号属于串行还是并行通信?全工还是单工?为什么要这么设计?
习题113. PWM信号长度为20ms,为什么一般只用前2.5ms?
为什么要讲解定时器,很简单,要用它去产生PWM信号。
定时器,顾名思义,按照定下闹钟到了某个时刻做某件事情。比如,你定下闹钟早上6点起床跑步,或者每隔半个小时喝一次水。你也可以给机器制作一个闹钟,每隔半秒二极管发光或者熄灭,或者每隔4秒灯亮起来再过4秒灯熄灭。
为了达成“每隔4秒二极管亮起来再过4秒二极管熄灭”,咱们构造一套定时器系统,它也许很奇怪,设计的有些复杂,但是还请你压制疑问,跟我一起把它造出来。
在上述的过程中,我们就利用制作了一个套装置,其中时钟是现实世界的时间源,循环计数装置提供实际需要的循环固定间隔,它们两个组成一个完整的简陋定时器,与单片机的基础定时器基本功能一致,下面正式介绍他们。
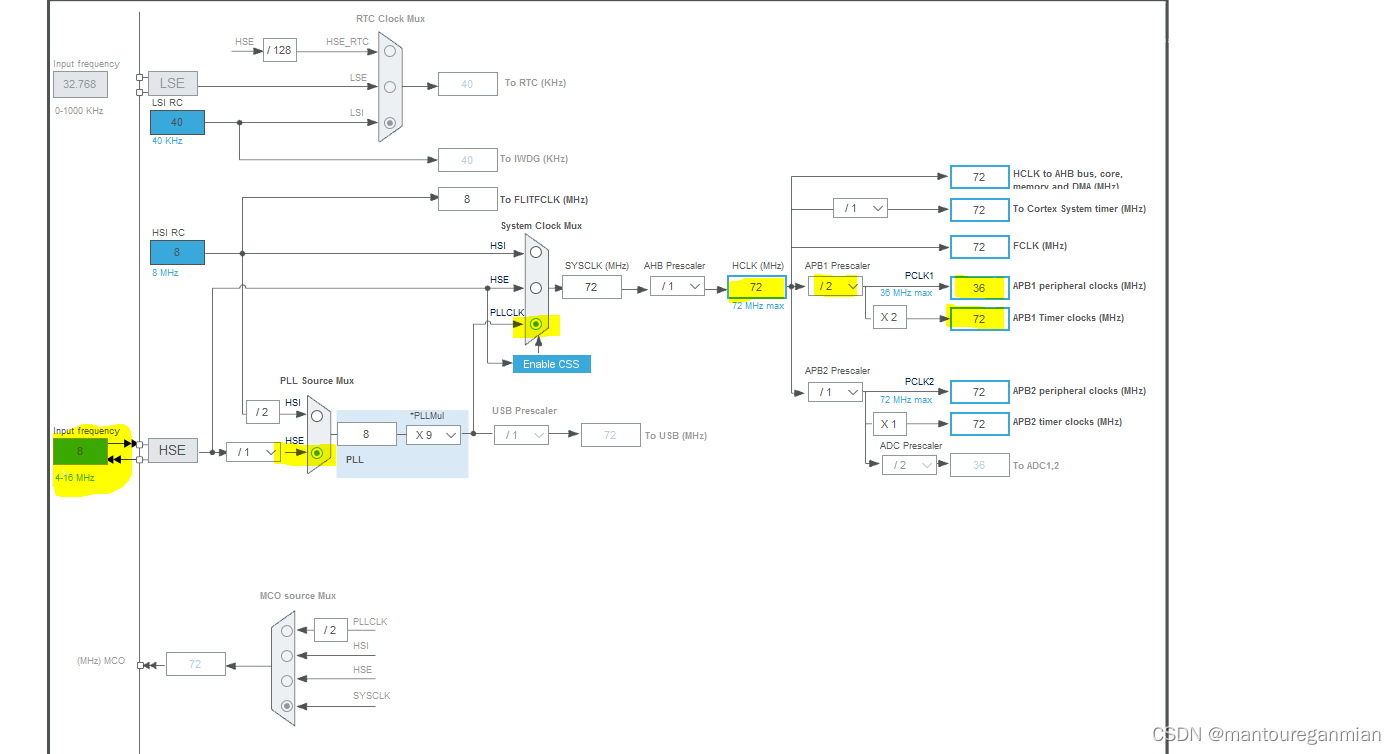
时钟装置:一般是STM32单片机的系统时钟,用变量sys_tck表示,频率72MHz,即将1秒分为720万份,显然太细,频率太高了,需要降低频率,将原来的频率切分为原来的n分之一,即
7200000
n
\frac{7200000}{n}
n7200000,术语叫做分频。如果采用720分频,即将原来72M频率除以720,即0.1MHz,每份0.01ms。STM32单片机允许的最大分频数为65536,其为uint16类型数字,这个分频数其实是一个寄存器。
循环计数器:由一些寄存器构成。最重要的两个:
循环计数器有三种模式:
| 模式名 | 解释 | 图像表示 |
|---|---|---|
| 向上计数 | 计数是自动加一,CK_CNT从0增长到ARR |  |
| 向下计数 | 计数是自动减一,CK_CNT从ARR减小到0 | 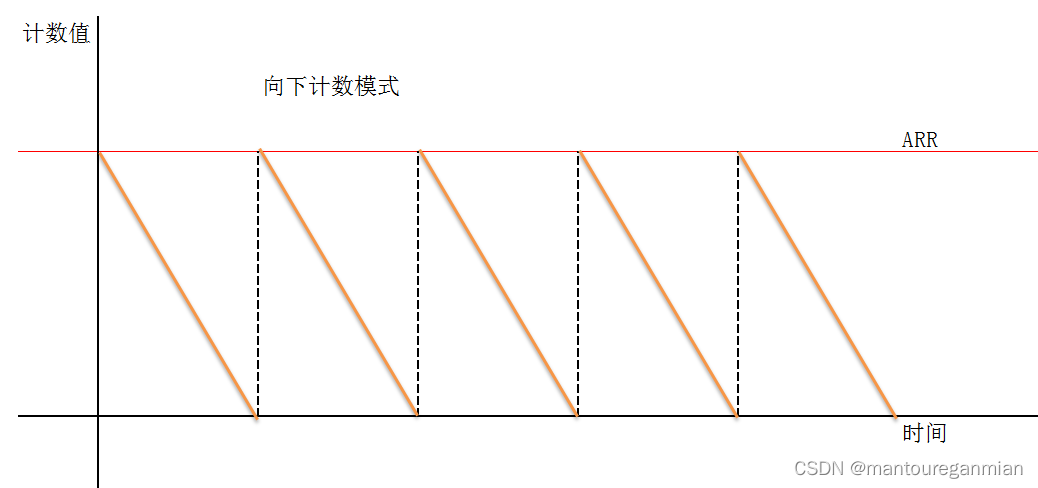 |
| 中心对齐 | 计数是先自动加一,再自动减一,CK_CNT先从0加到ARR然后再减到0 | 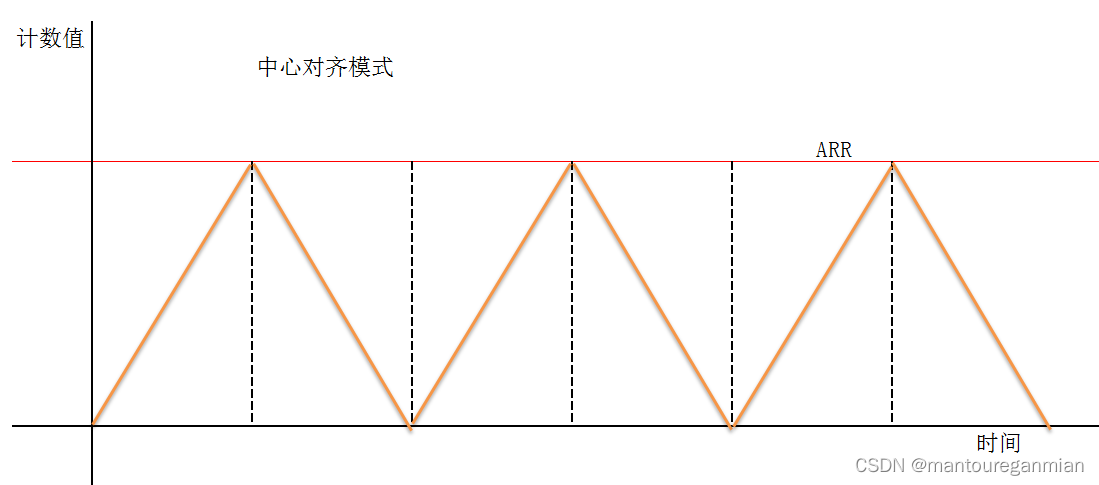 |
只有基础时钟是无法产生PWM信号的,因为它只能提供循环固定间隔,不能将间隔分为前半段和后半段,进而产生PWM。为了做到这点,需要给循环计数器加一个比较数字CCR,当计数器的值更新时,与CCR比较,并对外输出比较的结果,以方便做其他动作。
接上面灯泡明亮的例子,我们改成灯泡在一秒亮三秒灭的模式。我们只需要在上述提到的理想装置中再加一个比较数字就好:
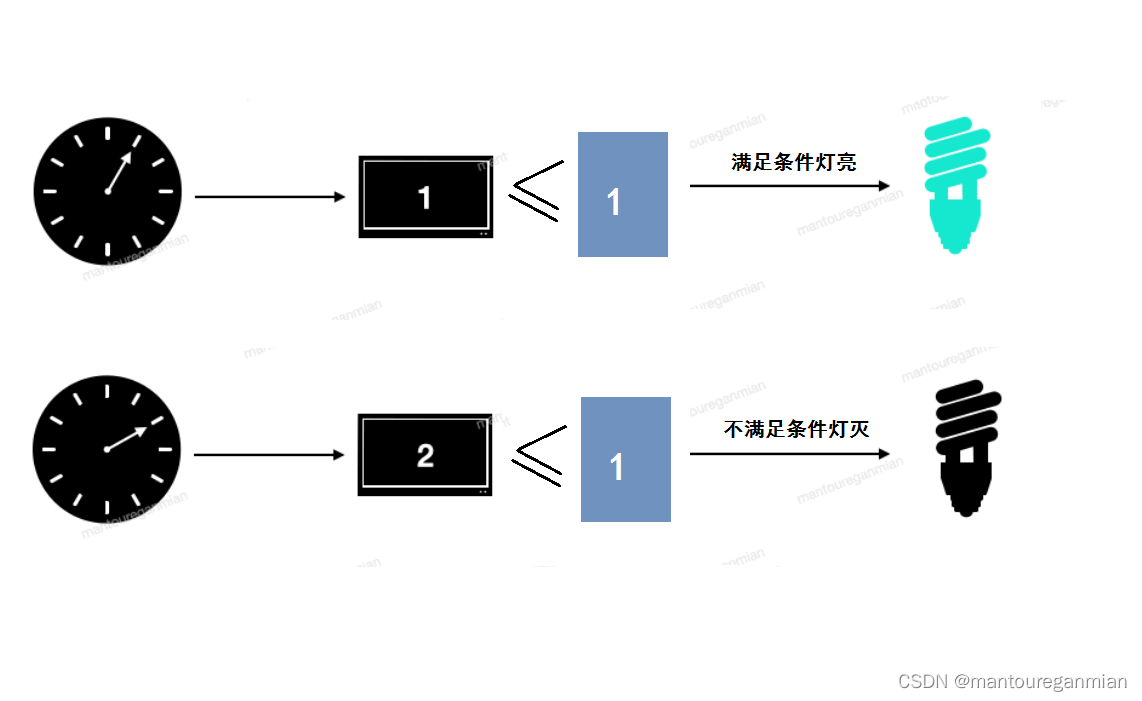
CCR在STM32中是叫做比较寄存器,是循环计数器的第三个重要的寄存器。是STM32高级定时器才有的功能。
习题121. 定时器的时钟装置,循环计数器各发挥了什么作用,请谈谈您的理解?
习题122. 循环计数器有哪些重要参数要设置?
习题123. STM32时钟频率为72MHz,分频数为uint16,CK_CNT为uint16,则最大循环时间间隔为多久时间?最小呢?
习题124. 如果要产生一个旋转360度的PWM信号,请设置时钟装置和循环计数器的寄存器值?
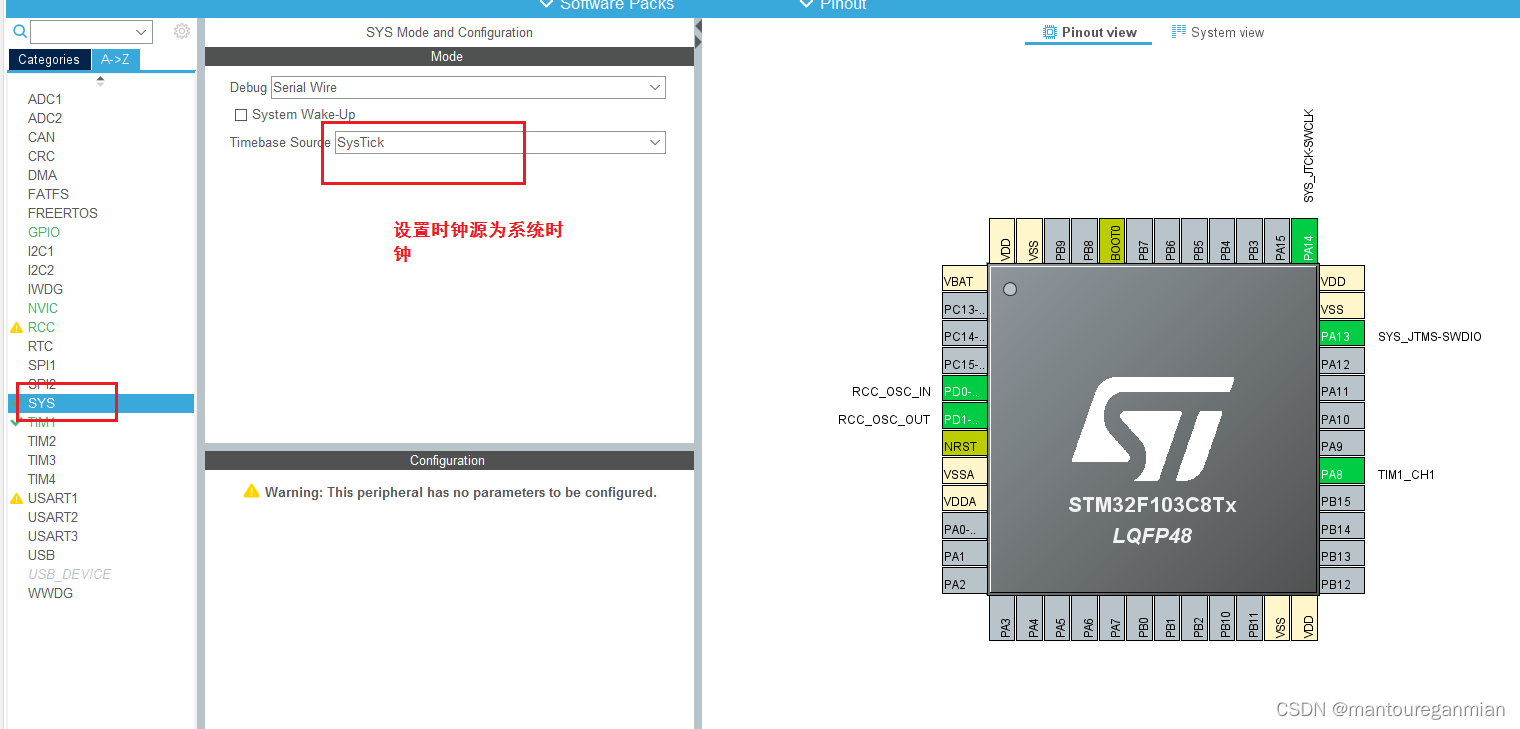
STM32已经为我们在硬件上封装好了上述的提到的:时钟装置、循环计数器和对外输出装置,以及计数器的自动比较等功能,你我现阶段无需关心其细节。我们只需要对这些东西进行相关设置和接线就好。

习题211: 为什么Counter Period是这里为1999,而不是2000?
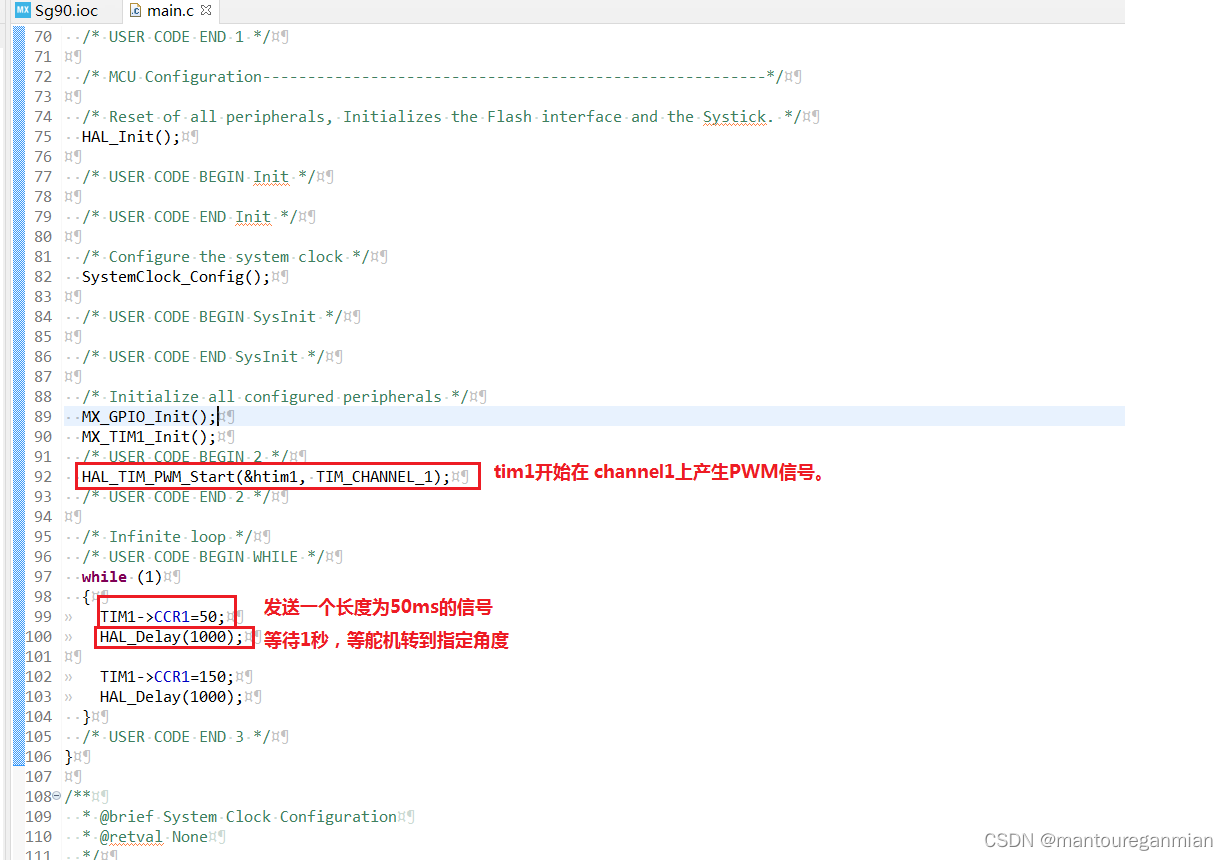
/* USER CODE BEGIN 2 */
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_1);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
TIM1->CCR1=50;
HAL_Delay(1000);
TIM1->CCR1=150;
HAL_Delay(1000);
}
/* USER CODE END 3 */
}
习题110. 如果2.5ms为90度,那么36度的PWM信号是高电平时间长度是?
习题111. 为什么是PWM控制舵机,有没有其他的方法?
习题112. PWM信号属于串行还是并行通信?全工还是单工?为什么要这么设计?
习题113. PWM信号长度为20ms,为什么一般只用前2.5ms?
习题121. 定时器的时钟装置,循环计数器各发挥了什么作用,请谈谈您的理解?
习题122. 循环计数器有哪些重要参数要设置?
习题123. STM32时钟频率为72MHz,分频数为uint16,CK_CNT为uint16,则最大循环时间间隔为多久时间?最小呢?
习题124. 如果要产生一个旋转360度的PWM信号,请设置时钟装置和循环计数器的寄存器值?
文章目录1.开发板选择*用到的资源2.串口通信(个人理解)3.代码分析(注释比较详细)1.主函数2.串口1配置3.串口2配置以及中断函数4.注意问题5.源码链接1.开发板选择我用的是STM32F103RCT6的板子,不过代码大概在F103系列的板子上都可以运行,我试过在野火103的霸道板上也可以,主要看一下串口对应的引脚一不一样就行了,不一样的就更改一下。*用到的资源keil5软件这里用到了两个串口资源,采集数据一个,串口通信一个,板子对应引脚如下:串口1,TX:PA9,RX:PA10串口2,TX:PA2,RX:PA32.串口通信(个人理解)我就从串口采集传感器数据这个过程说一下我自己的理解,
目录前言滤波电路科普主要分类实际情况单位的概念常用评价参数函数型滤波器简单分析滤波电路构成低通滤波器RC低通滤波器RL低通滤波器高通滤波器RC高通滤波器RL高通滤波器部分摘自《LC滤波器设计与制作》,侵权删。前言最近需要学习放大电路和滤波电路,但是由于只在之前做音乐频谱分析仪的时候简单了解过一点点运放,所以也是相当从零开始学习了。滤波电路科普主要分类滤波器:主要是从不同频率的成分中提取出特定频率的信号。有源滤波器:由RC元件与运算放大器组成的滤波器。可滤除某一次或多次谐波,最普通易于采用的无源滤波器结构是将电感与电容串联,可对主要次谐波(3、5、7)构成低阻抗旁路。无源滤波器:无源滤波器,又称
@作者:SYFStrive @博客首页:HomePage📜:微信小程序📌:个人社区(欢迎大佬们加入)👉:社区链接🔗📌:觉得文章不错可以点点关注👉:专栏连接🔗💃:感谢支持,学累了可以先看小段由小胖给大家带来的街舞👉微信小程序(🔥)目录自定义组件-behaviors 1、什么是behaviors 2、behaviors的工作方式 3、创建behavior 4、导入并使用behavior 5、behavior中所有可用的节点 6、同名字段的覆盖和组合规则总结最后自定义组件-behaviors 1、什么是behaviorsbehaviors是小程序中,用于实现
遍历文件夹我们通常是使用递归进行操作,这种方式比较简单,也比较容易理解。本文为大家介绍另一种不使用递归的方式,由于没有使用递归,只用到了循环和集合,所以效率更高一些!一、使用递归遍历文件夹整体思路1、使用File封装初始目录,2、打印这个目录3、获取这个目录下所有的子文件和子目录的数组。4、遍历这个数组,取出每个File对象4-1、如果File是否是一个文件,打印4-2、否则就是一个目录,递归调用代码实现publicclassSearchFile{publicstaticvoidmain(String[]args){//初始目录Filedir=newFile("d:/Dev");Datebeg
ES一、简介1、ElasticStackES技术栈:ElasticSearch:存数据+搜索;QL;Kibana:Web可视化平台,分析。LogStash:日志收集,Log4j:产生日志;log.info(xxx)。。。。使用场景:metrics:指标监控…2、基本概念Index(索引)动词:保存(插入)名词:类似MySQL数据库,给数据Type(类型)已废弃,以前类似MySQL的表现在用索引对数据分类Document(文档)真正要保存的一个JSON数据{name:"tcx"}二、入门实战{"name":"DESKTOP-1TSVGKG","cluster_name":"elasticsear
文章目录1.任务背景2.任务目标3.相关知识点4.任务实操4.1安装配置JDK4.2启动FISCOBCOS4.3下载解压WeBASE-Front4.4拷贝sdk证书文件4.5启动节点4.6访问节点4.7检查运行状态5.任务总结1.任务背景FISCOBCOS其实是有控制台管理工具,用来对区块链系统进行各种管理操作。但是对于初学者来说,还是可视化界面更友好,本节就来介绍WeBASE管理平台,这是一款微众银行开源的自研区块链中间件平台,可以降低区块链使用的门槛,大幅提高区块链应用的开发效率。微众银行是腾讯牵头设立的民营银行,在国内民营银行里还是比较出名的。微众银行参与FISCOBCOS生态建设,一定
一、什么是MQTT协议MessageQueuingTelemetryTransport:消息队列遥测传输协议。是一种基于客户端-服务端的发布/订阅模式。与HTTP一样,基于TCP/IP协议之上的通讯协议,提供有序、无损、双向连接,由IBM(蓝色巨人)发布。原理:(1)MQTT协议身份和消息格式有三种身份:发布者(Publish)、代理(Broker)(服务器)、订阅者(Subscribe)。其中,消息的发布者和订阅者都是客户端,消息代理是服务器,消息发布者可以同时是订阅者。MQTT传输的消息分为:主题(Topic)和负载(payload)两部分Topic,可以理解为消息的类型,订阅者订阅(Su
LL库和HAL库简介LL:Low-Layer,底层库HAL:HardwareAbstractionLayer,硬件抽象层库LL库和hal库对比,很精简,这实际上是一个精简的库。LL库的配置选择如下:在STM32CUBEMX中,点击菜单的“ProjectManager”–>“AdvancedSettings”,在下面的界面中选择“AdvancedSettings”,然后在每个模块后面选择使用的库总结:1、如果使用的MCU是小容量的,那么STM32CubeLL将是最佳选择;2、如果结合可移植性和优化,使用STM32CubeHAL并使用特定的优化实现替换一些调用,可保持最大的可移植性。另外HAL和L
TCL脚本语言简介•TCL(ToolCommandLanguage)是一种解释执行的脚本语言(ScriptingLanguage),它提供了通用的编程能力:支持变量、过程和控制结构;同时TCL还拥有一个功能强大的固有的核心命令集。TCL经常被用于快速原型开发,脚本编程,GUI和测试等方面。•实际上包含了两个部分:一个语言和一个库。首先,Tcl是一种简单的脚本语言,主要使用于发布命令给一些互交程序如文本编辑器、调试器和shell。由于TCL的解释器是用C\C++语言的过程库实现的,因此在某种意义上我们又可以把TCL看作C库,这个库中有丰富的用于扩展TCL命令的C\C++过程和函数,所以,Tcl是
文章目录一、项目场景二、基本模块原理与调试方法分析——信源部分:三、信号处理部分和显示部分:四、基本的通信链路搭建:四、特殊模块:interpretedMATLABfunction:五、总结和坑点提醒一、项目场景 最近一个任务是使用simulink搭建一个MIMO串扰消除的链路,并用实际收到的数据进行测试,在搭建的过程中也遇到了不少的问题(当然这比vivado里面的debug好不知道多少倍)。准备趁着这个机会,先以一个很基本的通信链路对simulink基础和相关的debug方法进行总结。 在本篇中,主要记录simulink的基本原理和基本的SISO通信传输链路(QPSK方式),计划在下篇记