1.java.util.concurrent包中的大多数同步器实现都是围绕着共同的基础行为,比如等待队列、条件队列、独占获取、共享获取等,而这些行为的抽象就是基于AbstractQueuedSynchronizer(简称AQS)实现的,AQS是一个抽象同步框架,可以用来实现一个依赖状态的同步器。
2.JDK中提供的大多数的同步器如Lock, Latch, Barrier等,都是基于AQS框架来实现的
【1】一般是通过一个内部类Sync继承 AQS
【2】将同步器所有调用都映射到Sync对应的方法
1.阻塞等待队列 , 2.共享/独占 , 3.公平/非公平 , 4.可重入 , 5.允许中断
1.Exclusive-独占,只有一个线程能执行,如ReentrantLock(详情可查看 深入理解ReentrantLock类锁)
2.Share-共享,多个线程可以同时执行,如Semaphore/CountDownLatch
【1】AQS当中的同步等待队列也称CLH队列,CLH队列是Craig、Landin、Hagersten三人发明的一种基于双向链表数据结构的队列,是FIFO先进先出线程等待队列,Java中的CLH队列是原CLH队列的一个变种,线程由原自旋机制改为阻塞机制。
【2】AQS 依赖CLH同步队列来完成同步状态的管理:
1)当前线程如果获取同步状态失败时,AQS则会将当前线程已经等待状态等信息构造成一个节点(Node)并将其加入到CLH同步队列,同时会阻塞当前线程
2)当同步状态释放时,会把首节点唤醒(公平锁),使其再次尝试获取同步状态。
3)通过signal或signalAll将条件队列中的节点转移到同步队列。(由条件队列转化为同步队列)
【3】图示:
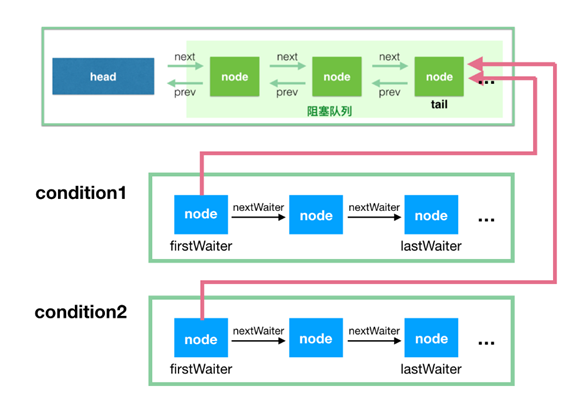
【1】AQS中条件队列是使用单向列表保存的,用nextWaiter来连接:
1)调用await方法阻塞线程;
2)当前线程存在于同步队列的头结点,调用await方法进行阻塞(从同步队列转化到条件队列)
1)值为0,初始化状态,表示当前节点在sync队列中,等待着获取锁。
2)CANCELLED,值为1,表示当前的线程被取消;
3)SIGNAL,值为-1,表示当前节点的后继节点包含的线程需要运行,也就是unpark;
4)CONDITION,值为-2,表示当前节点在等待condition,也就是在condition队列中;
5)PROPAGATE,值为-3,表示当前场景下后续的acquireShared能够得以执行;
1.属性值解析
//用链表来表示队列
private transient volatile Node head;
private transient volatile Node tail;
private volatile int state; //可以表示锁的加锁状态【独占锁只为1,共享锁可以大于1】,又可以表示锁的重入次数,0为没有加锁2.方法解析
//定义了主体的大体逻辑,如入队,如尝试加锁
private Node addWaiter(Node mode) {
Node node = new Node(Thread.currentThread(), mode);
// Try the fast path of enq; backup to full enq on failure
Node pred = tail;
if (pred != null) {
node.prev = pred;
if (compareAndSetTail(pred, node)) {
pred.next = node;
return node;
}
}
enq(node);
return node;
}
protected final boolean compareAndSetState(int expect, int update) {
// See below for intrinsics setup to support this
return unsafe.compareAndSwapInt(this, stateOffset, expect, update);
}
//模板方法的处理,如果子类没有实现,则子类中调用的话会报错
//提供给子类去实现的公平与非公平的逻辑
protected boolean tryAcquire(int arg) {
throw new UnsupportedOperationException();
}
//释放锁的逻辑
protected boolean tryRelease(int arg) {
throw new UnsupportedOperationException();
}
1.代码展示
static final class Node {
static final Node SHARED = new Node(); // 共享模式标记
static final Node EXCLUSIVE = null; // 独占模式标记
static final int CANCELLED = 1;
static final int SIGNAL = -1;
static final int CONDITION = -2;
static final int PROPAGATE = -3;
//值为0,初始化状态,表示当前节点在sync队列中,等待着获取锁。
//CANCELLED,值为1,表示当前的线程被取消;
//SIGNAL,值为-1,表示当前节点的后继节点包含的线程需要运行,也就是unpark;
//CONDITION,值为-2,表示当前节点在等待condition,也就是在condition队列中;
//PROPAGATE,值为-3,表示当前场景下后续的acquireShared能够得以执行;
volatile int waitStatus;
volatile Node prev;//前驱结点
volatile Node next;//后继结点
volatile Thread thread; //与节点绑定的线程
Node nextWaiter; // 存储condition队列中的后继节点
final boolean isShared() {
return nextWaiter == SHARED;
}
final Node predecessor() throws NullPointerException {
Node p = prev;
if (p == null)
throw new NullPointerException();
else
return p;
}
Node() {}
Node(Thread thread, Node mode) { // Used by addWaiter
this.nextWaiter = mode;
this.thread = thread;
}
Node(Thread thread, int waitStatus) { // Used by Condition
this.waitStatus = waitStatus;
this.thread = thread;
}
}
1.代码展示
//Condition用来替代synchronized锁的监视器的功能,而且更加灵活
//一个Condition实例需要与一个lock进行绑定
public interface Condition {
//调用此方法的线程将加入等待队列,阻塞直到被通知或者线程中断
void await() throws InterruptedException;
//调用此方法的线程将加入等待队列,阻塞直到被通知(线程中断忽略)
void awaitUninterruptibly();
//调用此方法的线程将加入等待队列,阻塞直到被通知或者线程中断或等待超时
long awaitNanos(long nanosTimeout) throws InterruptedException;
//调用此方法的线程将加入等待队列,阻塞直到被通知或者线程中断或等待超时
boolean await(long time, TimeUnit unit) throws InterruptedException;
//调用此方法的线程将加入等待队列,阻塞直到被通知或者线程中断或超出指定日期
boolean awaitUntil(Date deadline) throws InterruptedException;
//唤醒一个等待中的线程
void signal();
//唤醒所以等待中的线程
void signalAll();
}2.发现说明
【1】在Condition中,用await()替换wait(),用signal()替换notify(),用signalAll()替换notifyAll(),传统线程的通信方式,Condition都可以实现,这里注意,Condition是被绑定到Lock上的,要创建一个Lock的Condition必须用newCondition()方法。Condition的强大之处在于,对于一个锁,我们可以为多个线程间建立不同的Condition。如果采用Object类中的wait(), notify(), notifyAll()实现的话,当写入数据之后需要唤醒读线程时,不可能通过notify()或notifyAll()明确的指定唤醒读线程,而只能通过notifyAll唤醒所有线程,但是notifyAll无法区分唤醒的线程是读线程,还是写线程。所以,通过Condition能够更加精细的控制多线程的休眠与唤醒。
【2】但,condition的使用必须依赖于lock对象,通过lock对象的newCondition()方法初始化一个condition对象。
1.属性值解析
//由头尾两个节点指针形成的链表来达到队列的效果
private transient Node firstWaiter;
private transient Node lastWaiter;2.方法解析
【1】核心await方法
public final void await() throws InterruptedException {
//如果线程中断,直接抛出异常
if (Thread.interrupted())
throw new InterruptedException();
//进入等待队列中
Node node = addConditionWaiter();
//释放当前线程持有的锁,并获取当前同步器状态
int savedState = fullyRelease(node);
int interruptMode = 0;
//如果不在同步队列中,那么直接阻塞当前线程;直到被唤醒时,加入到同步队列中
while (!isOnSyncQueue(node)) {
LockSupport.park(this);
if ((interruptMode = checkInterruptWhileWaiting(node)) != 0)
break;
}
//此时已经被唤醒,那么尝试获取锁
if (acquireQueued(node, savedState) && interruptMode != THROW_IE)
interruptMode = REINTERRUPT;
//如果节点中断取消,那么清除节点
if (node.nextWaiter != null) // clean up if cancelled
unlinkCancelledWaiters();
if (interruptMode != 0)
reportInterruptAfterWait(interruptMode);
}
//addConditionWaiter将一个节点添加到condition队列中。在入队时,判断当前尾节点是不是CONDITION。如果不是则判断当前尾节点已经被取消,将当前节点出队。那么也就是说在队列中的节点状态,要么是CONDITION,要么是CANCELLED
private Node addConditionWaiter() {
Node t = lastWaiter;
// If lastWaiter is cancelled, clean out.
if (t != null && t.waitStatus != Node.CONDITION) {
unlinkCancelledWaiters();
t = lastWaiter;
}
Node node = new Node(Thread.currentThread(), Node.CONDITION);
if (t == null)
firstWaiter = node;
else
t.nextWaiter = node;
lastWaiter = node;
return node;
}
//方法的作用是移除取消的节点。方法本身只有在持有锁的时候会被调用。方法会遍历当前condition队列,将所有非Condition状态的节点移除。
private void unlinkCancelledWaiters() {
Node t = firstWaiter;
Node trail = null;
while (t != null) {
Node next = t.nextWaiter;
if (t.waitStatus != Node.CONDITION) {
t.nextWaiter = null;
if (trail == null)
firstWaiter = next;
else
trail.nextWaiter = next;
if (next == null)
lastWaiter = trail;
}
else
trail = t;
t = next;
}
}
【2】核心signal方法与signalAll方法
public final void signal() {
if (!isHeldExclusively())
throw new IllegalMonitorStateException();
Node first = firstWaiter;
if (first != null)
doSignal(first);
}
public final void signalAll() {
if (!isHeldExclusively())
throw new IllegalMonitorStateException();
Node first = firstWaiter;
if (first != null)
doSignalAll(first);
}
private void doSignal(Node first) {
do {
if ( (firstWaiter = first.nextWaiter) == null)
lastWaiter = null;
first.nextWaiter = null;
} while (!transferForSignal(first) &&
(first = firstWaiter) != null);
}
private void doSignalAll(Node first) {
lastWaiter = firstWaiter = null;
do {
Node next = first.nextWaiter;
first.nextWaiter = null;
transferForSignal(first);
first = next;
} while (first != null);
}
final boolean transferForSignal(Node node) {
//如果不能更改waitStatus,则表示该节点已被取消
if (!compareAndSetWaitStatus(node, Node.CONDITION, 0))
return false;
Node p = enq(node);
int ws = p.waitStatus;
if (ws > 0 || !compareAndSetWaitStatus(p, ws, Node.SIGNAL))
LockSupport.unpark(node.thread);
return true;
}
我有一个用户工厂。我希望默认情况下确认用户。但是鉴于unconfirmed特征,我不希望它们被确认。虽然我有一个基于实现细节而不是抽象的工作实现,但我想知道如何正确地做到这一点。factory:userdoafter(:create)do|user,evaluator|#unwantedimplementationdetailshereunlessFactoryGirl.factories[:user].defined_traits.map(&:name).include?(:unconfirmed)user.confirm!endendtrait:unconfirmeddoenden
华为OD机试题本篇题目:明明的随机数题目输入描述输出描述:示例1输入输出说明代码编写思路最近更新的博客华为od2023|什么是华为od,od薪资待遇,od机试题清单华为OD机试真题大全,用Python解华为机试题|机试宝典【华为OD机试】全流程解析+经验分享,题型分享,防作弊指南华为o
C#实现简易绘图工具一.引言实验目的:通过制作窗体应用程序(C#画图软件),熟悉基本的窗体设计过程以及控件设计,事件处理等,熟悉使用C#的winform窗体进行绘图的基本步骤,对于面向对象编程有更加深刻的体会.Tutorial任务设计一个具有基本功能的画图软件**·包括简单的新建文件,保存,重新绘图等功能**·实现一些基本图形的绘制,包括铅笔和基本形状等,学习橡皮工具的创建**·设计一个合理舒适的UI界面**注明:你可能需要先了解一些关于winform窗体应用程序绘图的基本知识,以及关于GDI+类和结构的知识二.实验环境Windows系统下的visualstudio2017C#窗体应用程序三.
最近在学习CAN,记录一下,也供大家参考交流。推荐几个我觉得很好的CAN学习,本文也是在看了他们的好文之后做的笔记首先是瑞萨的CAN入门,真的通透;秀!靠这篇我竟然2天理解了CAN协议!实战STM32F4CAN!原文链接:https://blog.csdn.net/XiaoXiaoPengBo/article/details/116206252CAN详解(小白教程)原文链接:https://blog.csdn.net/xwwwj/article/details/105372234一篇易懂的CAN通讯协议指南1一篇易懂的CAN通讯协议指南1-知乎(zhihu.com)视频推荐CAN总线个人知识总
MIMO技术的优缺点优点通过下面三个增益来总体概括:阵列增益。阵列增益是指由于接收机通过对接收信号的相干合并而活得的平均SNR的提高。在发射机不知道信道信息的情况下,MIMO系统可以获得的阵列增益与接收天线数成正比复用增益。在采用空间复用方案的MIMO系统中,可以获得复用增益,即信道容量成倍增加。信道容量的增加与min(Nt,Nr)成正比分集增益。在采用空间分集方案的MIMO系统中,可以获得分集增益,即可靠性性能的改善。分集增益用独立衰落支路数来描述,即分集指数。在使用了空时编码的MIMO系统中,由于接收天线或发射天线之间的间距较远,可认为它们各自的大尺度衰落是相互独立的,因此分布式MIMO
Transformers开始在视频识别领域的“猪突猛进”,各种改进和魔改层出不穷。由此作者将开启VideoTransformer系列的讲解,本篇主要介绍了FBAI团队的TimeSformer,这也是第一篇使用纯Transformer结构在视频识别上的文章。如果觉得有用,就请点赞、收藏、关注!paper:https://arxiv.org/abs/2102.05095code(offical):https://github.com/facebookresearch/TimeSformeraccept:ICML2021author:FacebookAI一、前言Transformers(VIT)在图
遍历文件夹我们通常是使用递归进行操作,这种方式比较简单,也比较容易理解。本文为大家介绍另一种不使用递归的方式,由于没有使用递归,只用到了循环和集合,所以效率更高一些!一、使用递归遍历文件夹整体思路1、使用File封装初始目录,2、打印这个目录3、获取这个目录下所有的子文件和子目录的数组。4、遍历这个数组,取出每个File对象4-1、如果File是否是一个文件,打印4-2、否则就是一个目录,递归调用代码实现publicclassSearchFile{publicstaticvoidmain(String[]args){//初始目录Filedir=newFile("d:/Dev");Datebeg
通常,数组被实现为内存块,集合被实现为HashMap,有序集合被实现为跳跃列表。在Ruby中也是如此吗?我正在尝试从性能和内存占用方面评估Ruby中不同容器的使用情况 最佳答案 数组是Ruby核心库的一部分。每个Ruby实现都有自己的数组实现。Ruby语言规范只规定了Ruby数组的行为,并没有规定任何特定的实现策略。它甚至没有指定任何会强制或至少建议特定实现策略的性能约束。然而,大多数Rubyist对数组的性能特征有一些期望,这会迫使不符合它们的实现变得默默无闻,因为实际上没有人会使用它:插入、前置或追加以及删除元素的最坏情况步骤复
关闭。这个问题不符合StackOverflowguidelines.它目前不接受答案。我们不允许提问寻求书籍、工具、软件库等的推荐。您可以编辑问题,以便用事实和引用来回答。关闭3年前。Improvethisquestion我正处于学习Ruby的阶段,我想查看一些小型库的源代码以了解它们是如何构建的。我不知道什么是小型图书馆,但希望SO能推荐一些易于理解的图书馆来学习。因此,如果有人知道一两个非常小的库,这是新手Rubyists学习的好例子,请推荐!我想使用Manveru'sInnatelib,因为它试图保持在2000LOC以下,但我还不熟悉其中经常使用的Ruby速记。也许大约100-5
在ruby中,你可以这样做:classThingpublicdeff1puts"f1"endprivatedeff2puts"f2"endpublicdeff3puts"f3"endprivatedeff4puts"f4"endend现在f1和f3是公共(public)的,f2和f4是私有(private)的。内部发生了什么,允许您调用一个类方法,然后更改方法定义?我怎样才能实现相同的功能(表面上是创建我自己的java之类的注释)例如...classThingfundeff1puts"hey"endnotfundeff2puts"hey"endendfun和notfun将更改以下函数定