最近学习使用HC05 蓝牙模块进行单片机 连接使用,进行手机端数据通信,用到了,和大家分享一下。
HC05 蓝牙模块介绍
HC05 模块,是 ALIENTEK 生成的一款高性能主从一体蓝牙串口模块,可以同各种带蓝牙功能的电脑、蓝牙主机、手机、PDA、PSP 等智能终端配对,该模块支持非常宽的波特率范围:4800~1382400,并且模块兼容 5V 或 3.3V 单片机系统,可以很方便与您的产品进行连接。
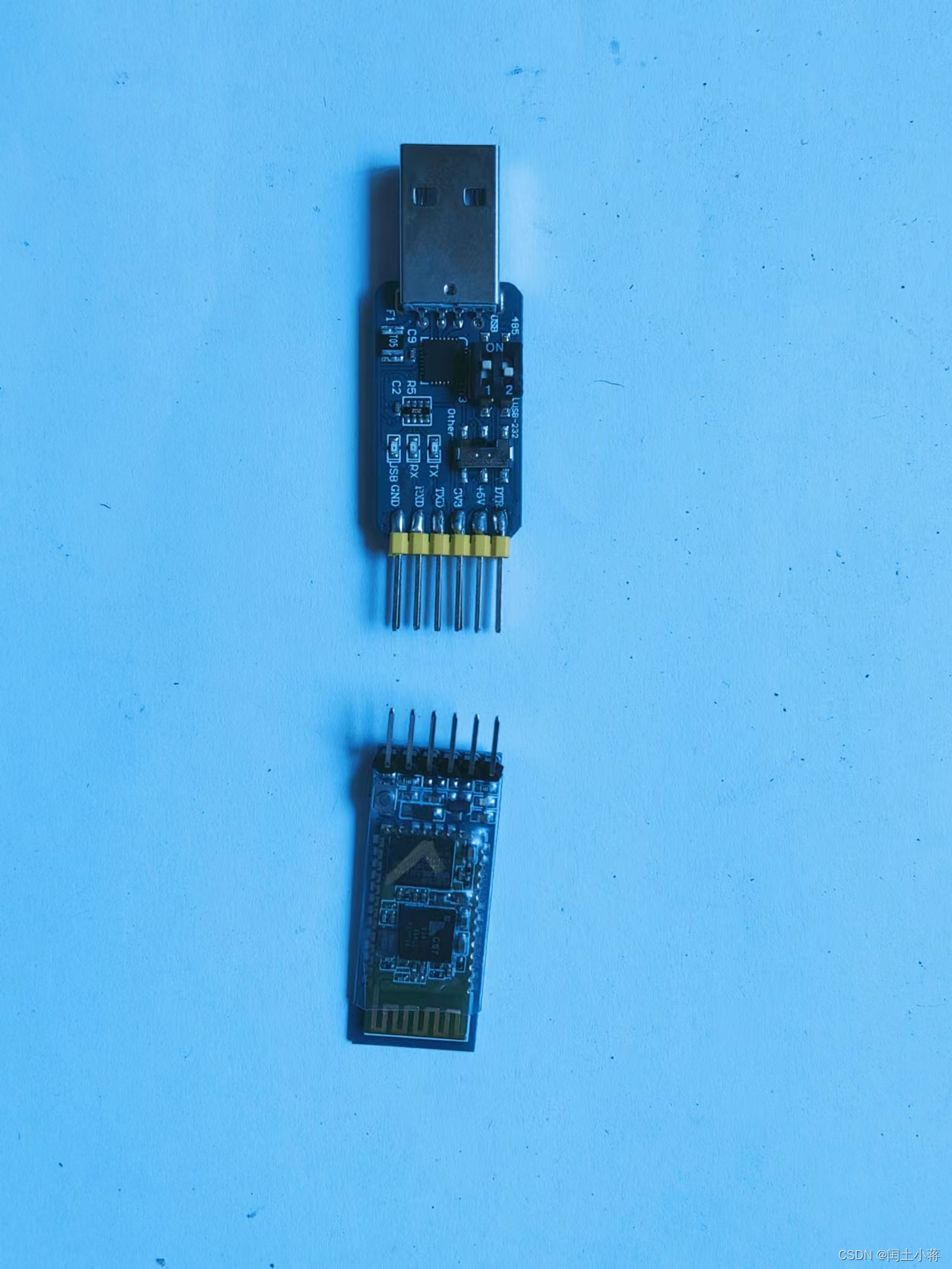
实物图如下(正反两面)
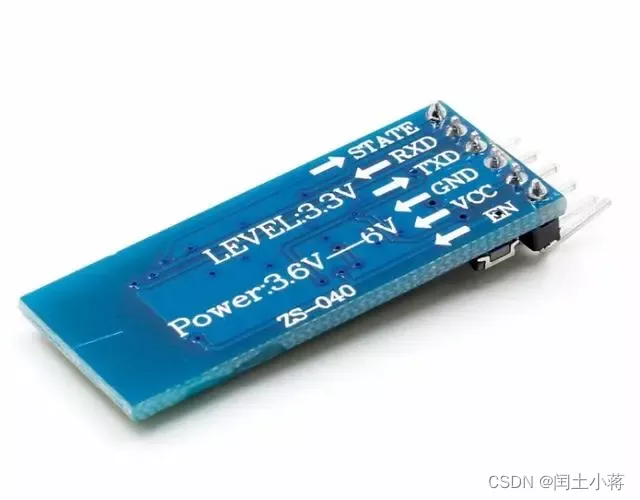

接线方式
RXD ----------------->T
TXD ------------------>R
GND ------------------->GND
VCC -------------------->VCC(5v)
EN/KEY ----------------->VCC(3.3v )
配置成功后通信只需要连接4跟线即可(RXD,TXD,GND ,VCC)实现蓝牙通信
可以直接接线在stm32各类型好板子进行配置,也可以usb 配置如下图
该模块的使用方式
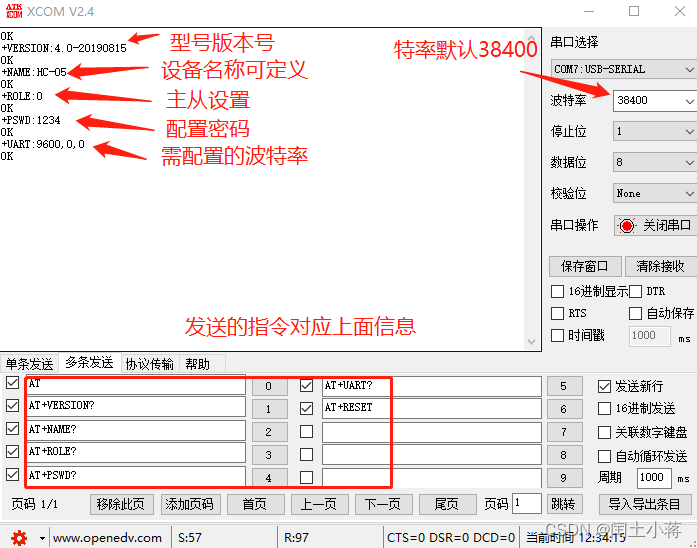
AT指令操作
蓝牙模块需要通过AT指令进行模式与连接的设置,不同型号的蓝牙模块它的AT指令也可能会有差别,如果发现发送指令后模块没有回应,检查一下AT指令是否发送正确,是否进入命令模式,这里就要查看自己手中的两个蓝牙模块的资料包了,若两个蓝牙模块不同,则它们的配置指令也可能会不相同,就要用对应的指令配置了。
串口工具示例1(正确返回OK)
串口工具示例2
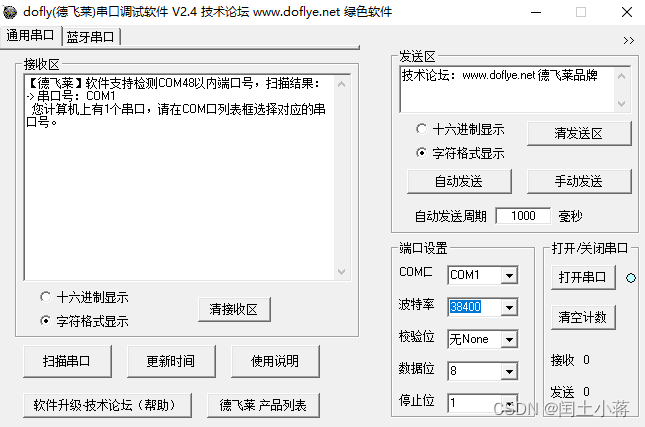
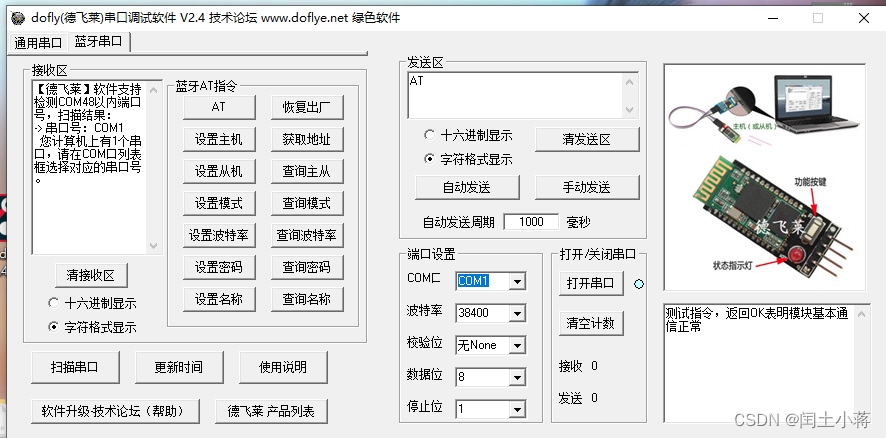
以上2种串口工具均可以配置
模块连接
要连接两个蓝牙模块,就相当于两个蓝牙模块进行配对,也就是两个蓝牙设备进行配对,那么应该用哪一个去寻找目标对应的蓝牙设备呢?这里就需要一个设备为主机,另一个设备则为从机,只能通过主机来寻找从机进行连接配对,从机只能等待连接,而不能主动地寻找设备进行连接。
说到主机与从机,就要看看自己手中的蓝牙模块是否支持主机模式了,至少要有一块主从一体的蓝牙模块,这里我简单直接将HC05 设置为从机,用手机去连接进行通信。(该模块支持蓝牙4.0,基本上4G,5G手机蓝牙已经是5.0 了,所以我用老款手机)
我的配置要求
HC05
9600
从机
1234
配置完成后,即可进行蓝牙通讯连接
//------------------------------前面的都是第一步蓝牙的配置,下面开始通信编写代码---------------------------------------------//
通信思路
蓝牙模块连接串口3,进行手机连接蓝牙发送内容和命令操作
HC05部分
//初始化HC05模块
//返回值:0,成功;1,失败.
u8 HC05_Init(void)
{
u8 retry=10,t;
u8 temp=1;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); //使能PORTA
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_15; // 端口配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //上拉输入
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHz
GPIO_Init(GPIOA, &GPIO_InitStructure); //根据设定参数初始化A15
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4; // 端口配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHz
GPIO_Init(GPIOA, &GPIO_InitStructure); //根据设定参数初始化GPIOA4
GPIO_SetBits(GPIOA,GPIO_Pin_4);
GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable,ENABLE);
HC05_KEY=1;
HC05_LED=1;
USART3_Init(9600); //初始化串口3为:9600,波特率.
while(retry--)
{
HC05_KEY=1; //KEY置高,进入AT模式
delay_ms(10);
u3_printf("AT\r\n"); //发送AT测试指令
HC05_KEY=0; //KEY拉低,退出AT模式
for(t=0;t<10;t++) //最长等待50ms,来接收HC05模块的回应
{
if(USART3_RX_STA&0X8000)break;
delay_ms(5);
}
if(USART3_RX_STA&0X8000) //接收到一次数据了
{
temp=USART3_RX_STA&0X7FFF; //得到数据长度
USART3_RX_STA=0;
if(temp==4&&USART3_RX_BUF[0]=='O'&&USART3_RX_BUF[1]=='K')
{
temp=0;//接收到OK响应
break;
}
}
}
if(retry==0)temp=1; //检测失败
return temp;
}
//获取HC05模块的角色
//返回值:0,从机;1,主机;0XFF,获取失败.
u8 HC05_Get_Role(void)
{
u8 retry=0X0F;
u8 temp,t;
while(retry--)
{
HC05_KEY=1; //KEY置高,进入AT模式
delay_ms(10);
u3_printf("AT+ROLE?\r\n"); //查询角色
for(t=0;t<20;t++) //最长等待200ms,来接收HC05模块的回应
{
delay_ms(10);
if(USART3_RX_STA&0X8000)break;
}
HC05_KEY=0; //KEY拉低,退出AT模式
if(USART3_RX_STA&0X8000) //接收到一次数据了
{
temp=USART3_RX_STA&0X7FFF; //得到数据长度
USART3_RX_STA=0;
if(temp==13&&USART3_RX_BUF[0]=='+')//接收到正确的应答了
{
temp=USART3_RX_BUF[6]-'0';//得到主从模式值
break;
}
}
}
if(retry==0)temp=0XFF;//查询失败.
return temp;
}
//HC05设置命令
//此函数用于设置HC05,适用于仅返回OK应答的AT指令
//atstr:AT指令串.比如:"AT+RESET"/"AT+UART=9600,0,0"/"AT+ROLE=0"等字符串
//返回值:0,设置成功;其他,设置失败.
u8 HC05_Set_Cmd(u8* atstr)
{
u8 retry=0X0F;
u8 temp,t;
while(retry--)
{
HC05_KEY=1; //KEY置高,进入AT模式
delay_ms(10);
u3_printf("%s\r\n",atstr); //发送AT字符串
HC05_KEY=0; //KEY拉低,退出AT模式
for(t=0;t<20;t++) //最长等待100ms,来接收HC05模块的回应
{
if(USART3_RX_STA&0X8000)break;
delay_ms(5);
}
if(USART3_RX_STA&0X8000) //接收到一次数据了
{
temp=USART3_RX_STA&0X7FFF; //得到数据长度
USART3_RX_STA=0;
if(temp==4&&USART3_RX_BUF[0]=='O')//接收到正确的应答了
{
temp=0;
break;
}
}
}
if(retry==0)temp=0XFF;//设置失败.
return temp;
}
///
//str:命令串.(这里注意不再需要再输入回车符)
void HC05_CFG_CMD(u8 *str)
{
u8 temp;
u8 t;
HC05_KEY=1; //KEY置高,进入AT模式
delay_ms(10);
u3_printf("%s\r\n",(char*)str); //发送指令
for(t=0;t<50;t++) //最长等待500ms,来接收HC05模块的回应
{
if(USART3_RX_STA&0X8000)break;
delay_ms(10);
}
HC05_KEY=0; //KEY拉低,退出AT模式
if(USART3_RX_STA&0X8000) //接收到一次数据了
{
temp=USART3_RX_STA&0X7FFF; //得到数据长度
USART3_RX_STA=0;
USART3_RX_BUF[temp]=0; //加结束符
printf("\r\n%s",USART3_RX_BUF);//发送回应数据到串口1
}
}
主函数
//显示HC05模块的主从状态
void HC05_Role_Show(void)
{
if(HC05_Get_Role()==1)
{
LCD_ShowString(10,140,200,16,16,"ROLE:Master"); //主机
}
else
{
LCD_ShowString(10,140,200,16,16,"ROLE:Slave "); //从机
}
}
//显示HC05模块的连接状态
void HC05_Sta_Show(void)
{
if(HC05_LED)
{
LCD_ShowString(110,140,120,16,16,"STA:Connected "); //连接成功
}
else
{
LCD_ShowString(110,140,120,16,16,"STA:Disconnect"); //未连接
}
}
int main()
{
u8 t=0;
u8 key;
u8 sendmask=0;
u8 sendcnt=0;
u8 sendbuf[20];
u8 reclen=0;
SysTick_Init(72);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //中断优先级分组 分2组
LED_Init();
KEY_Init();
USART1_Init(115200);
TFTLCD_Init(); //LCD初始化
FRONT_COLOR=RED;
LCD_ShowString(10,10,tftlcd_data.width,tftlcd_data.height,16,"PRECHIN");
LCD_ShowString(10,30,tftlcd_data.width,tftlcd_data.height,16,"www.prechin.com");
LCD_ShowString(10,50,tftlcd_data.width,tftlcd_data.height,16,"BT05 BlueTooth Test");
delay_ms(1000); //等待蓝牙模块上电稳定
while(HC05_Init()) //初始化HC05模块
{
printf("HC05 Error!\r\n");
LCD_ShowString(10,90,200,16,16,"HC05 Error! ");
delay_ms(500);
LCD_ShowString(10,90,200,16,16,"Please Check!!!");
delay_ms(100);
}
printf("HC05 OK!\r\n");
LCD_ShowString(10,90,210,16,16,"KEY_UP:ROLE KEY1:SEND/STOP");
LCD_ShowString(10,110,200,16,16,"HC05 Standby!");
LCD_ShowString(10,160,200,16,16,"Send:");
LCD_ShowString(10,180,200,16,16,"Receive:");
FRONT_COLOR=BLUE;
HC05_Role_Show();
delay_ms(100);
USART3_RX_STA=0;
while(1)
{
key=KEY_Scan(0);
if(key==KEY_UP_PRESS) //切换模块主从设置
{
key=HC05_Get_Role();
if(key!=0XFF)
{
key=!key; //状态取反
if(key==0)HC05_Set_Cmd("AT+ROLE=0");
else HC05_Set_Cmd("AT+ROLE=1");
HC05_Role_Show();
HC05_Set_Cmd("AT+RESET"); //复位HC05模块
delay_ms(200);
}
}
else if(key==KEY1_PRESS)
{
sendmask=!sendmask; //发送/停止发送
if(sendmask==0)LCD_Fill(10+40,160,240,160+16,WHITE);//清除显示
}
else delay_ms(10);
if(t==50)
{
if(sendmask) //定时发送
{
sprintf((char*)sendbuf,"PREHICN HC05 %d\r\n",sendcnt);
LCD_ShowString(10+40,160,200,16,16,sendbuf); //显示发送数据
printf("%s\r\n",sendbuf);
u3_printf("PREHICN HC05 %d\r\n",sendcnt); //发送到蓝牙模块
sendcnt++;
if(sendcnt>99)sendcnt=0;
}
HC05_Sta_Show();
t=0;
LED1=!LED1;
}
if(USART3_RX_STA&0X8000) //接收到一次数据了
{
LCD_Fill(10,200,240,320,WHITE); //清除显示
reclen=USART3_RX_STA&0X7FFF; //得到数据长度
USART3_RX_BUF[reclen]='\0'; //加入结束符
printf("reclen=%d\r\n",reclen);
printf("USART3_RX_BUF=%s\r\n",USART3_RX_BUF);
if(reclen==10||reclen==11) //控制D2检测
{
if(strcmp((const char*)USART3_RX_BUF,"+LED2 ON\r\n")==0)LED2=0;//打开LED2
if(strcmp((const char*)USART3_RX_BUF,"+LED2 OFF\r\n")==0)LED2=1;//关闭LED2
}
LCD_ShowString(10,200,209,119,16,USART3_RX_BUF);//显示接收到的数据
USART3_RX_STA=0;
}
t++;
}
}
串口1
int fputc(int ch,FILE *p) //函数默认的,在使用printf函数时自动调用
{
USART_SendData(USART1,(u8)ch);
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE)==RESET);
return ch;
}
//串口1中断服务程序
//注意,读取USARTx->SR能避免莫名其妙的错误
u8 USART1_RX_BUF[USART1_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.
//接收状态
//bit15, 接收完成标志
//bit14, 接收到0x0d
//bit13~0, 接收到的有效字节数目
u16 USART1_RX_STA=0; //接收状态标记
/*******************************************************************************
* 函 数 名 : USART1_Init
* 函数功能 : USART1初始化函数
* 输 入 : bound:波特率
* 输 出 : 无
*******************************************************************************/
void USART1_Init(u32 bound)
{
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
/* 配置GPIO的模式和IO口 */
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_9;//TX //串口输出PA9
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOA,&GPIO_InitStructure); /* 初始化串口输入IO */
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_10;//RX //串口输入PA10
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IN_FLOATING; //模拟输入
GPIO_Init(GPIOA,&GPIO_InitStructure); /* 初始化GPIO */
//USART1 初始化设置
USART_InitStructure.USART_BaudRate = bound;//波特率设置
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART1, &USART_InitStructure); //初始化串口1
USART_Cmd(USART1, ENABLE); //使能串口1
USART_ClearFlag(USART1, USART_FLAG_TC);
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启相关中断
//Usart1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;//串口1中断通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority =3; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器、
}
/*******************************************************************************
* 函 数 名 : USART1_IRQHandler
* 函数功能 : USART1中断函数
* 输 入 : 无
* 输 出 : 无
*******************************************************************************/
void USART1_IRQHandler(void) //串口1中断服务程序
{
u8 r;
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断
{
r =USART_ReceiveData(USART1);//(USART1->DR); //读取接收到的数据
if((USART1_RX_STA&0x8000)==0)//接收未完成
{
if(USART1_RX_STA&0x4000)//接收到了0x0d
{
if(r!=0x0a)USART1_RX_STA=0;//接收错误,重新开始
else USART1_RX_STA|=0x8000; //接收完成了
}
else //还没收到0X0D
{
if(r==0x0d)USART1_RX_STA|=0x4000;
else
{
USART1_RX_BUF[USART1_RX_STA&0X3FFF]=r;
USART1_RX_STA++;
if(USART1_RX_STA>(USART1_REC_LEN-1))USART1_RX_STA=0;//接收数据错误,重新开始接收
}
}
}
}
}
串口3
//串口接收缓存区
u8 USART3_RX_BUF[USART3_MAX_RECV_LEN]; //接收缓冲,最大USART3_MAX_RECV_LEN个字节.
u8 USART3_TX_BUF[USART3_MAX_SEND_LEN]; //发送缓冲,最大USART3_MAX_SEND_LEN字节
//通过判断接收连续2个字符之间的时间差不大于10ms来决定是不是一次连续的数据.
//如果2个字符接收间隔超过10ms,则认为不是1次连续数据.也就是超过10ms没有接收到
//任何数据,则表示此次接收完毕.
//接收到的数据状态
//[15]:0,没有接收到数据;1,接收到了一批数据.
//[14:0]:接收到的数据长度
vu16 USART3_RX_STA=0;
void USART3_IRQHandler(void)
{
u8 res;
if(USART_GetITStatus(USART3, USART_IT_RXNE) != RESET)//接收到数据
{
res =USART_ReceiveData(USART3);
if((USART3_RX_STA&(1<<15))==0)//接收完的一批数据,还没有被处理,则不再接收其他数据
{
if(USART3_RX_STA<USART3_MAX_RECV_LEN) //还可以接收数据
{
TIM_SetCounter(TIM7,0);//计数器清空 //计数器清空
if(USART3_RX_STA==0) //使能定时器7的中断
{
TIM_Cmd(TIM7,ENABLE);//使能定时器7
}
USART3_RX_BUF[USART3_RX_STA++]=res; //记录接收到的值
}else
{
USART3_RX_STA|=1<<15; //强制标记接收完成
}
}
}
}
//初始化IO 串口3
//pclk1:PCLK1时钟频率(Mhz)
//bound:波特率
void USART3_Init(u32 bound)
{
NVIC_InitTypeDef NVIC_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); // GPIOB时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART3,ENABLE); //串口3时钟使能
USART_DeInit(USART3); //复位串口3
//USART3_TX PB10
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; //PB10
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOB, &GPIO_InitStructure); //初始化PB10
//USART3_RX PB11
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_Init(GPIOB, &GPIO_InitStructure); //初始化PB11
USART_InitStructure.USART_BaudRate = bound;//波特率一般设置为9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART3, &USART_InitStructure); //初始化串口 3
USART_Cmd(USART3, ENABLE); //使能串口
//使能接收中断
USART_ITConfig(USART3, USART_IT_RXNE, ENABLE);//开启中断
//设置中断优先级
NVIC_InitStructure.NVIC_IRQChannel = USART3_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=2 ;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
TIM7_Int_Init(99,7199); //10ms中断
USART3_RX_STA=0; //清零
TIM_Cmd(TIM7,DISABLE); //关闭定时器7
}
//串口3,printf 函数
//确保一次发送数据不超过USART3_MAX_SEND_LEN字节
void u3_printf(char* fmt,...)
{
u16 i,j;
va_list ap;
va_start(ap,fmt);
vsprintf((char*)USART3_TX_BUF,fmt,ap);
va_end(ap);
i=strlen((const char*)USART3_TX_BUF); //此次发送数据的长度
for(j=0;j<i;j++) //循环发送数据
{
while(USART_GetFlagStatus(USART3,USART_FLAG_TC)==RESET); //循环发送,直到发送完毕
USART_SendData(USART3,USART3_TX_BUF[j]);
}
}
串口软件和手机助手软件以及PZ-HC05蓝牙模块开发手册–整理好放在百度网盘,请前往下载
链接:https://pan.baidu.com/s/1jIcNQIdTpD8tQpnPk052NQ
提取码:j0nr
–来自百度网盘超级会员V10的分享
rails中是否有任何规定允许站点的所有AJAXPOST请求在没有authenticity_token的情况下通过?我有一个调用Controller方法的JqueryPOSTajax调用,但我没有在其中放置任何真实性代码,但调用成功。我的ApplicationController确实有'request_forgery_protection'并且我已经改变了config.action_controller.consider_all_requests_local在我的environments/development.rb中为false我还搜索了我的代码以确保我没有重载ajaxSend来发送
我的工作要求我为某些测试自动生成电子邮件。我一直在四处寻找,但未能找到可以快速实现的合理解决方案。它需要在outlook而不是其他邮件服务器中,因为我们有一些奇怪的身份验证规则,我们需要保存草稿而不是仅仅发送邮件的选项。显然win32ole可以做到这一点,但我找不到任何相当简单的例子。 最佳答案 假设存储了Outlook凭据并且您设置为自动登录到Outlook,WIN32OLE可以很好地完成此操作:require'win32ole'outlook=WIN32OLE.new('Outlook.Application')message=
文章目录1.开发板选择*用到的资源2.串口通信(个人理解)3.代码分析(注释比较详细)1.主函数2.串口1配置3.串口2配置以及中断函数4.注意问题5.源码链接1.开发板选择我用的是STM32F103RCT6的板子,不过代码大概在F103系列的板子上都可以运行,我试过在野火103的霸道板上也可以,主要看一下串口对应的引脚一不一样就行了,不一样的就更改一下。*用到的资源keil5软件这里用到了两个串口资源,采集数据一个,串口通信一个,板子对应引脚如下:串口1,TX:PA9,RX:PA10串口2,TX:PA2,RX:PA32.串口通信(个人理解)我就从串口采集传感器数据这个过程说一下我自己的理解,
目录前言滤波电路科普主要分类实际情况单位的概念常用评价参数函数型滤波器简单分析滤波电路构成低通滤波器RC低通滤波器RL低通滤波器高通滤波器RC高通滤波器RL高通滤波器部分摘自《LC滤波器设计与制作》,侵权删。前言最近需要学习放大电路和滤波电路,但是由于只在之前做音乐频谱分析仪的时候简单了解过一点点运放,所以也是相当从零开始学习了。滤波电路科普主要分类滤波器:主要是从不同频率的成分中提取出特定频率的信号。有源滤波器:由RC元件与运算放大器组成的滤波器。可滤除某一次或多次谐波,最普通易于采用的无源滤波器结构是将电感与电容串联,可对主要次谐波(3、5、7)构成低阻抗旁路。无源滤波器:无源滤波器,又称
最近在学习CAN,记录一下,也供大家参考交流。推荐几个我觉得很好的CAN学习,本文也是在看了他们的好文之后做的笔记首先是瑞萨的CAN入门,真的通透;秀!靠这篇我竟然2天理解了CAN协议!实战STM32F4CAN!原文链接:https://blog.csdn.net/XiaoXiaoPengBo/article/details/116206252CAN详解(小白教程)原文链接:https://blog.csdn.net/xwwwj/article/details/105372234一篇易懂的CAN通讯协议指南1一篇易懂的CAN通讯协议指南1-知乎(zhihu.com)视频推荐CAN总线个人知识总
MIMO技术的优缺点优点通过下面三个增益来总体概括:阵列增益。阵列增益是指由于接收机通过对接收信号的相干合并而活得的平均SNR的提高。在发射机不知道信道信息的情况下,MIMO系统可以获得的阵列增益与接收天线数成正比复用增益。在采用空间复用方案的MIMO系统中,可以获得复用增益,即信道容量成倍增加。信道容量的增加与min(Nt,Nr)成正比分集增益。在采用空间分集方案的MIMO系统中,可以获得分集增益,即可靠性性能的改善。分集增益用独立衰落支路数来描述,即分集指数。在使用了空时编码的MIMO系统中,由于接收天线或发射天线之间的间距较远,可认为它们各自的大尺度衰落是相互独立的,因此分布式MIMO
深度学习部署:Windows安装pycocotools报错解决方法1.pycocotools库的简介2.pycocotools安装的坑3.解决办法更多Ai资讯:公主号AiCharm本系列是作者在跑一些深度学习实例时,遇到的各种各样的问题及解决办法,希望能够帮助到大家。ERROR:Commanderroredoutwithexitstatus1:'D:\Anaconda3\python.exe'-u-c'importsys,setuptools,tokenize;sys.argv[0]='"'"'C:\\Users\\46653\\AppData\\Local\\Temp\\pip-instal
注意:本文主要掌握DCN自研无线产品的基本配置方法和注意事项,能够进行一般的项目实施、调试与运维AP基本配置命令AP登录用户名和密码均为:adminAP默认IP地址为:192.168.1.10AP默认情况下DHCP开启AP静态地址配置:setmanagementstatic-ip192.168.10.1AP开启/关闭DHCP功能:setmanagementdhcp-statusup/downAP设置默认网关:setstatic-ip-routegeteway192.168.10.254查看AP基本信息:getsystemgetmanagementgetmanaged-apgetrouteAP配
s=Socket.new(Socket::AF_INET,Socket::SOCK_STREAM,0)s.connect(Socket.pack_sockaddr_in('port','hostname'))ssl=OpenSSL::SSL::SSLSocket.new(s,sslcert)ssl.connect从这里开始,如果ssl连接和底层套接字仍然是ESTABLISHED,或者它是否在默认值7200之后进入CLOSE_WAIT,我想检查一个线程几秒钟甚至更糟的是在实际上不需要.write()或.read()的情况下关闭。是用select()、IO.select()还是其他方法完成
我完全不是程序员,正在学习使用Ruby和Rails框架进行编程。我目前正在使用Ruby1.8.7和Rails3.0.3,但我想知道我是否应该升级到Ruby1.9,因为我真的没有任何升级的“遗留”成本。缺点是什么?我是否会遇到与普通gem的兼容性问题,或者甚至其他我不太了解甚至无法预料的问题? 最佳答案 你应该升级。不要坚持从1.8.7开始。如果您发现不支持1.9.2的gem,请避免使用它们(因为它们很可能不被维护)。如果您对gem是否兼容1.9.2有任何疑问,您可以在以下位置查看:http://www.railsplugins.or