文章目录
临近期末,学校的单片机课程需要做课程设计,主要内容是基于51单片机的可调速电机,具体要求如下,在此记录一下具体的一个解题方案。
- 要求利用单片机输出PWM波形,通过改变占空比,改变电枢两端电压的平均值,从而改变电动机的转速
- 通过按键进行手动速度调整(速度+ 速度-)
- 利用串口调试助手或编写上位机软件,通过上位机控制直流速度调整
- 测量直流电机转速,并实时显示
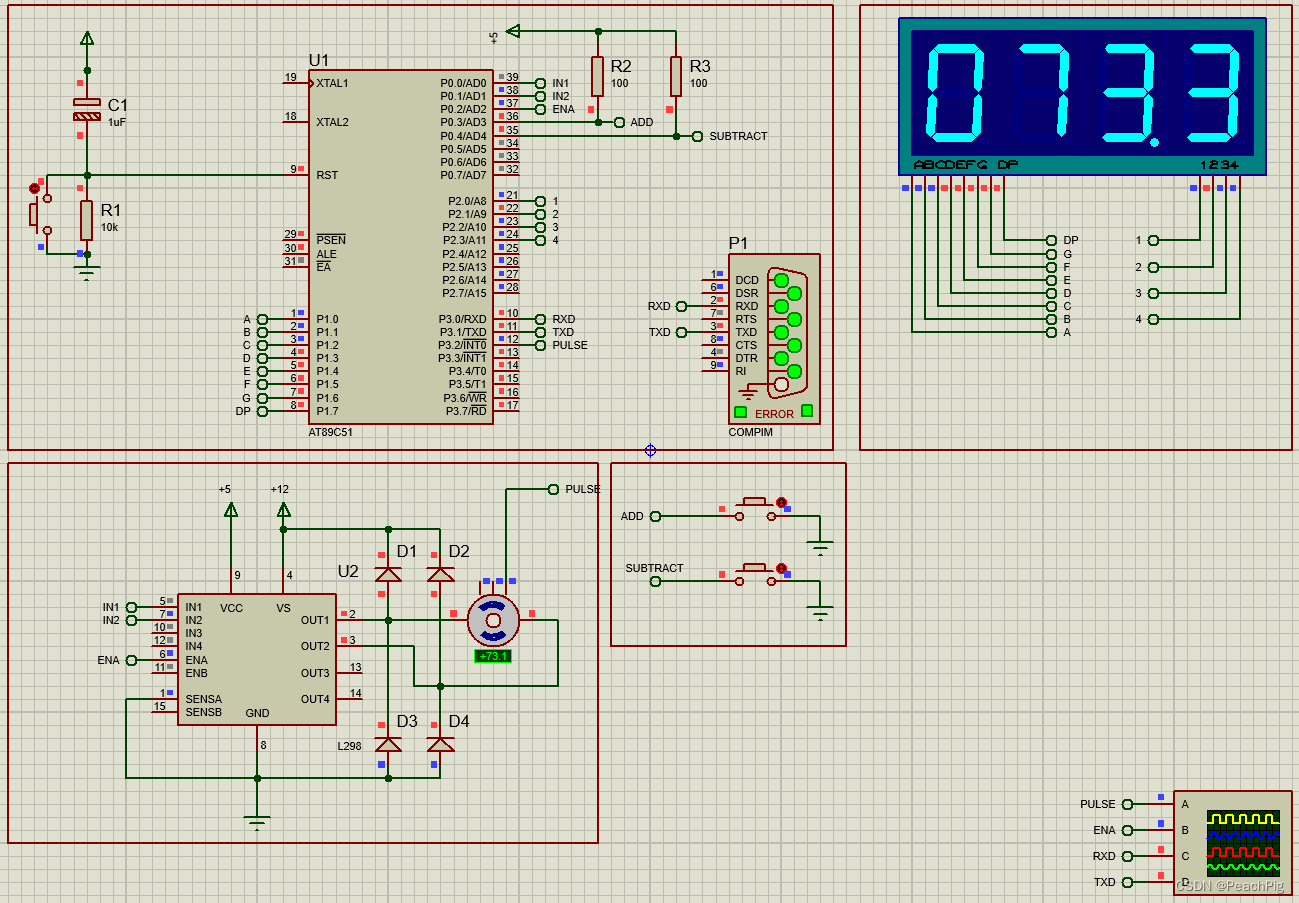
首先是绘制原理图如下,右下角示波器为方便观察PWM脉冲波形用,可忽略
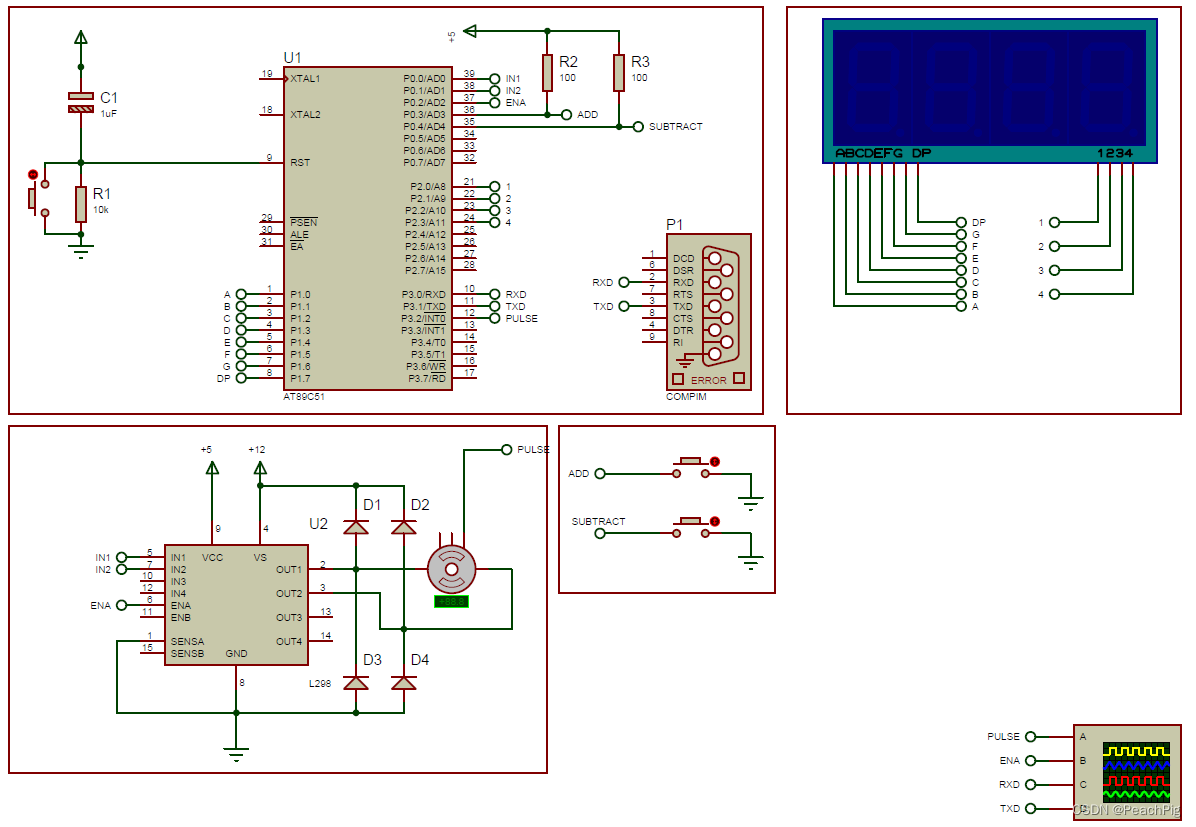
由于单片机的输出功率不足以驱动电机运动,因此这里使用L298芯片搭建一个驱动电路,驱动电压为12V,用于驱动电机运动。驱动电路如图。L298芯片的工作电压为5V(VCC接5V电压),支持同时驱动两台电机,可接驱动电压范围为(+5V~+46V),输出电流高达4A。
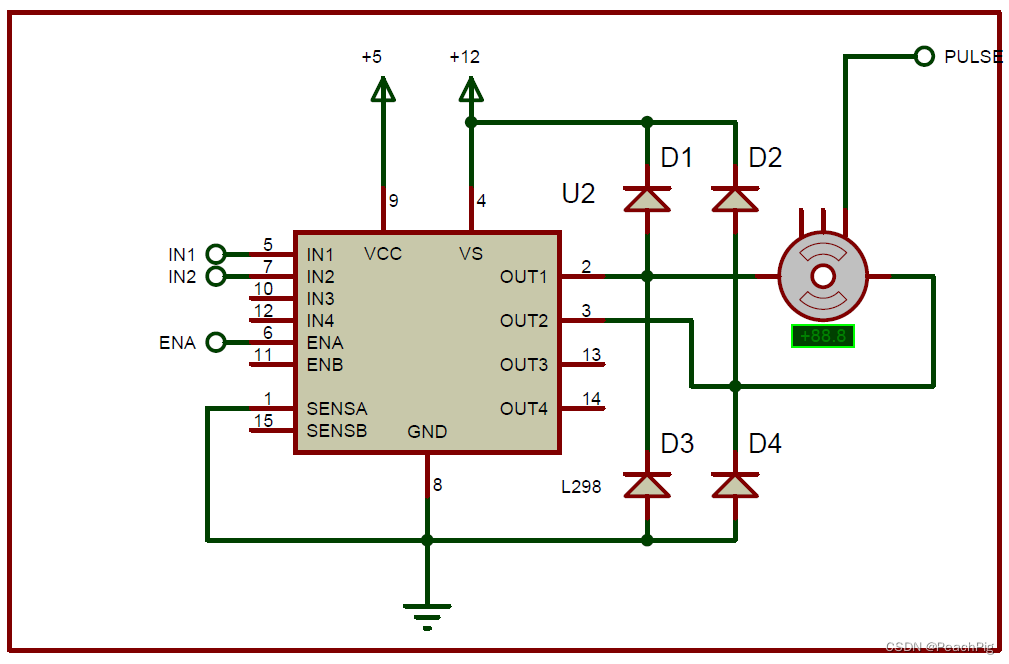
L298芯片控制引脚状态与电机对应状态如下图。因此,若要让电机运动则需要,ENA置1,IN1与IN2引脚所处电平相反。
| ENA | IN1 | IN2 | 直流电机状态 |
|---|---|---|---|
| 0 | X | X | 停止 |
| 1 | 0 | 0 | 制动 |
| 1 | 0 | 1 | 正转 |
| 1 | 1 | 0 | 反转 |
| 1 | 1 | 1 | 制动 |
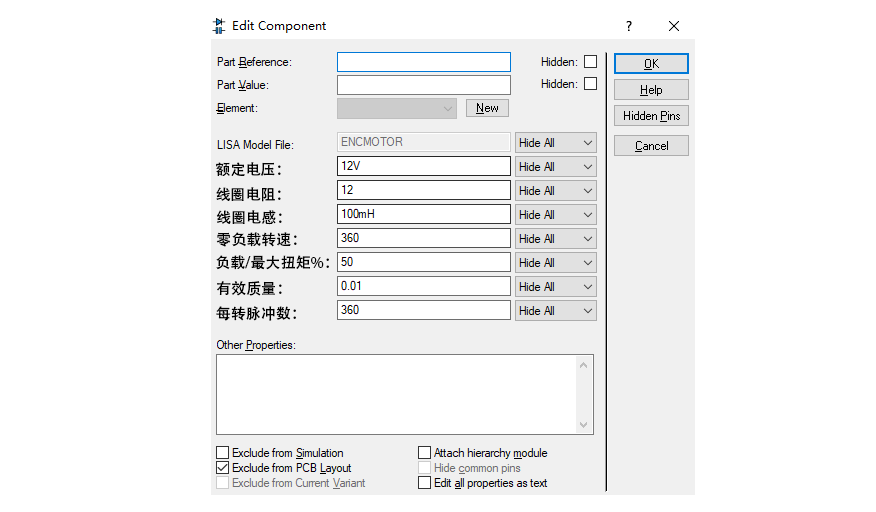
这里由于需要测量电机转速,使用需要使用带有编码器的电机,Proteus中带有这样的一个电机,元件名称为MOTOR-ENCODER。MOTOR-ENCODER有5根引脚,其中左右两个接工作电压。上面三根引脚,左边与右边电机每转一圈就输出设定的脉冲数(这里设定每转一圈输出360个脉冲),二者脉冲相位相差90°。中间的引脚电机每转一圈引脚输出一个脉冲。 电机具体属性参数如下,这里设置电机额定电压为12V(因为驱动电路的驱动电压为12V),每转脉冲数为360(取值范围为1~360),其余保持默认。
由于需要用到串口通信,因此需要用到Proteus中的虚拟串口COMPIM,将元件端口设置为COM1,波特率设置为9600,数据位8位,无校验位,停止位1位。将虚拟串口的RXD与单片机的RXD相连,TXD与TXD相连(与一般的串口连接不同,一般需要TXD与RXD交叉相连)。
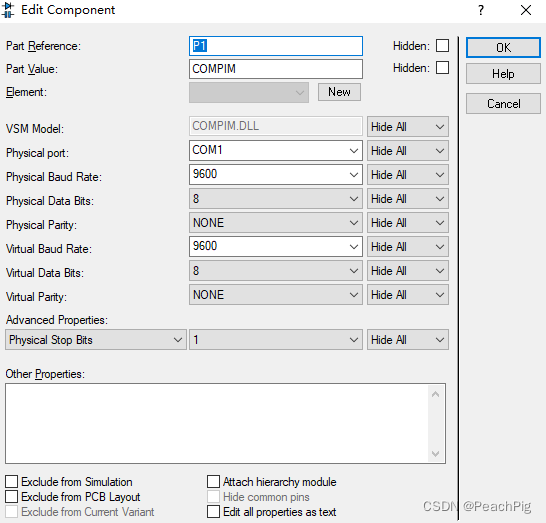
然后打开VSPD虚拟串口连接软件(VSPD软件的下载与使用可参考该文章: 虚拟串口 VSPD 的使用),将COM1与COM2端口进行虚拟链接。然后进入串口助手打开COM2端口(一定不能打开COM1口,因为COM1口已被单片机占用) 设置好波特率、校验位与停止位,即可与单片机成功硬件连接。
测速原理:单位时间内,根据该时间段内统计的脉冲数计算电机实际速度,这里单位时间为50ms。
由于编码器设置为每圈发出360个脉冲,则统计在50ms内的脉冲数即可知道在这50ms内电机转了多少圈,从而可推算出电机每分钟的转速。
设编码器单圈总脉冲数为C,在时间T0内,统计到的编码器脉冲数为M0,则转速n的计算公式为:
n = M0/(C*T0)。
PWM即脉冲宽度调制,在具有惯性的系统中,可以通过对一系列脉冲的宽度进行调制,来等效的获得所需要的模拟参量。
其实就是通过控制高低电平的时间,来对输出的波形进行控制。
其中有几个重要的参数
PWM的频率:
是指1秒钟内信号从高电平到低电平再回到高电平的次数(一个周期);
也就是说一秒钟PWM有多少个周期
单位: Hz
表示方式: 50Hz 100Hz
PWM的周期:
T=1/f
周期=1/频率
50Hz = 20ms 一个周期
如果频率为50Hz ,也就是说一个周期是20ms 那么一秒钟就有 50次PWM周期
占空比:
是一个脉冲周期内,高电平的时间与整个周期时间的比例
单位: % (0%-100%)
表示方式:20%
一个简单的生成PWM的方法: 利用定时器进行定时中断,分别设置两个变量counter和compare。其中compare表示占空比。假设每100us定时器产生一次中断,则每进一次中断counter++,中断100次为一个周期,即T=10ms。
假设设置compare为60,即占空比为60%
每次定时器进入中断后,将当前counter值与compare进行判断,若counter<compare则置引脚为高电平,否则置低电平。这样在一个周期中,counter从1至100计数,counter为1~60时引脚均为高电平,即在一个周期内有60%的时间引脚都处于高电平。
这样我们就可以通过调整compare变量的值来控制PWM的占空比,从而达到控制电机转速的目的。
有关PWM的详细知识可参考以下文章
51单片机-PWM调速(直流电机,智能小车的电机调速)
PWM原理 PWM频率与占空比详解
#include <REG51.H>
#define K 21/8
void UartInit(void);
void UART_SendByte(unsigned char Byte);
void Timer0Init(void);
sbit motor1_IN1=P0^0;
sbit motor1_IN2=P0^1;
sbit motor1_ENA1=P0^2;
sbit ADD=P0^3;
sbit SUBTRACT=P0^4;
unsigned char led_mod[10]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90};//共阳极字模
unsigned char led_point[10]={0x40,0x79,0x24,0x30,0x19,0x12,0x02,0x78,0x00,0x10};//带小数点字模
unsigned char counter,compare;//compare为占空比
unsigned int n,m,rad;//n为脉冲数
void delay(unsigned char time) //1ms@11.0592MHz
{
unsigned char i, j;
i = 15*time;
j = 90;
do
{
while (--j);
} while (--i);
}
void Display() //LED显示
{
P2=(0x01);
P1=led_mod[(rad/100)%10];
delay(1);
P2=(0x01<<1);
P1=led_mod[(rad/10)%10];
delay(1);
P2=(0x01<<2);
P1=led_point[rad%10];
delay(1);
P2=(0x01<<3);
P1=led_mod[(rad%10)];
delay(1);
}
void move(void) //启动电机
{
motor1_IN1=1;
motor1_IN2=0;
}
void UartInit(void) //9600bps@11.0592MHz
{
SCON = 0x50; //8位数据,可变波特率
TMOD &= 0x0F; //设置定时器模式
TMOD |= 0x20; //设置定时器模式
TL1 = 0xFD; //设置定时初始值
TH1 = 0xFD; //设置定时初始值
ET1 = 0; //禁止定时器1中断
TR1 = 1; //定时器1开始计时
ES=1; //开启中断
EA=1; //开启中断
PS=1; //设置优先级
}
void Timer0Init(void) //100微秒@11.0592MHz
{
TMOD &= 0xF0; //设置定时器模式
TMOD |= 0x02; //设置定时器模式
TL0 = 0xA4; //设置定时初始值
TH0 = 0xA4; //设置定时重载值
TF0 = 0; //清除TF0标志
TR0 = 1; //定时器0开始计时
ET0=1; //定时器0中断开启
EA=1; //EA开启
PT0=0; //定时器0开始计时
}
void UART_Routine(void) interrupt 4 //串口接收中断
{
if(RI==1)
{
compare=SBUF; //接收串口传输来的数据
SBUF=compare; //将当前占空比发送回上位机
while(!TI); //等待发送完毕
TI=0; //标志位复位
RI=0; //标志位复位
}
}
void Timer0_Routine(void) interrupt 1 //定时器0中断,用于PWM生成
{
TL0 = 0xA4; //设置定时初始值
TH0 = 0xA4; //设置定时初始值
counter++;
m++;
counter%=100;
if(counter<compare) //PWM生成
motor1_ENA1=1;
else
motor1_ENA1=0;
if(m==500) //50ms后计算一次转速
{
rad=n*K;//计算转速,若结果与实际有较大误差则调整比例系数K
m=0;
n=0;
}
}
void interrupt0_int() //电机编码器脉冲中断初始化
{
IT0=1;
EX0=1;
EA=1;
PX0=0;
}
void motor_Routine(void) interrupt 0 //编码器脉冲中断函数
{
n++; //脉冲数+1
}
void main()
{
Timer0Init(); //定时器0初始化
interrupt0_int(); //电机编码器中断初始化
UartInit(); //串口中断初始化
compare=70; //初始占空比70%
n=0; //电机旋转圈数初始化
m=0; //计时次数初始化
move(); //启动电机
while(1)
{
if(ADD==0)
{
compare=compare+10; //按下按键占空比+10
if(compare>100)
compare=100;
while(!ADD) //等待松开
Display();
}
if(SUBTRACT==0)
{
compare=compare-10; //按下按键占空比-10
if(compare<0)
compare=0;
while(!SUBTRACT) //等待松开
Display();
}
Display();
}
}
电机正常转动,同时数码管显示当前转速,可通过ADD按键和SUBTRACT按键对转速进行加减速 。
可通过串口对转速大小进行调整。

当我在Rails控制台中按向上或向左箭头时,出现此错误:irb(main):001:0>/Users/me/.rvm/gems/ruby-2.0.0-p247/gems/rb-readline-0.4.2/lib/rbreadline.rb:4269:in`blockin_rl_dispatch_subseq':invalidbytesequenceinUTF-8(ArgumentError)我使用rvm来管理我的ruby安装。我正在使用=>ruby-2.0.0-p247[x86_64]我使用bundle来管理我的gem,并且我有rb-readline(0.4.2)(人们推荐的最少
我正在使用Ruby2.1.1和Rails4.1.0.rc1。当执行railsc时,它被锁定了。使用Ctrl-C停止,我得到以下错误日志:~/.rvm/gems/ruby-2.1.1/gems/spring-1.1.2/lib/spring/client/run.rb:47:in`gets':Interruptfrom~/.rvm/gems/ruby-2.1.1/gems/spring-1.1.2/lib/spring/client/run.rb:47:in`verify_server_version'from~/.rvm/gems/ruby-2.1.1/gems/spring-1.1.
我将我的Rails应用程序部署到OpenShift,它运行良好,但我无法在生产服务器上运行“Rails控制台”。它给了我这个错误。我该如何解决这个问题?我尝试更新rubygems,但它也给出了权限被拒绝的错误,我也无法做到。railsc错误:Warning:You'reusingRubygems1.8.24withSpring.UpgradetoatleastRubygems2.1.0andrun`gempristine--all`forbetterstartupperformance./opt/rh/ruby193/root/usr/share/rubygems/rubygems
说在前面这部分我本来是合为一篇来写的,因为目的是一样的,都是通过独立按键来控制LED闪灭本质上是起到开关的作用,即调用函数和中断函数。但是写一篇太累了,我还是决定分为两篇写,这篇是调用函数篇。在本篇中你主要看到这些东西!!!1.调用函数的方法(主要讲语法和格式)2.独立按键如何控制LED亮灭3.程序中的一些细节(软件消抖等)1.调用函数的方法思路还是比较清晰地,就是通过按下按键来控制LED闪灭,即每按下一次,LED取反一次。重要的是,把按键与LED联系在一起。我打算用K1来作为开关,看了一下开发板原理图,K1连接的是单片机的P31口,当按下K1时,P31是与GND相连的,也就是说,当我按下去时
在我的Character模型中,我添加了:字符.rbbefore_savedoself.profile_picture_url=asset_path('icon.png')end但是,对于数据库中已存在的所有角色,它们的profile_picture_url为nil。因此,我想进入控制台并遍历所有这些并进行设置。在我试过的控制台中:Character.find_eachdo|c|c.profile_picture_url=asset_path('icon.png')end但这给出了错误:NoMethodError:undefinedmethod`asset_path'formain:O
当我进入Rails控制台时,我已将pry设置为加载代替irb。我找不到该页面或不记得如何将其恢复为默认行为,因为它似乎干扰了我的Rubymine调试器。有什么建议吗? 最佳答案 我刚发现问题,pry-railsgem。忘记了它的目的是让“railsconsole”打开pry。 关于ruby-on-rails-带有Pry的Rails控制台,我们在StackOverflow上找到一个类似的问题: https://stackoverflow.com/question
我正在尝试将$stdout设置为临时写入一个文件,然后返回到一个文件。test.rb:old_stdout=$stdout$stdout.reopen("mytestfile.out",'w+')puts"thisgoesinmytestfile"$stdout=old_stdoutputs"thisshouldbeontheconsole"$stdout.reopen("mytestfile1.out",'w+')puts"thisgoesinmytestfile1:"$stdout=old_stdoutputs"thisshouldbebackontheconsole"这是输出。r
我在思考流量控制的最佳实践。我应该走哪条路?1)不要检查任何东西并让程序失败(更清晰的代码,自然的错误消息):defself.fetch(feed_id)feed=Feed.find(feed_id)feed.fetchend2)通过返回nil静默失败(但是,“CleanCode”说,你永远不应该返回null):defself.fetch(feed_id)returnunlessfeed_idfeed=Feed.find(feed_id)returnunlessfeedfeed.fetchend3)抛出异常(因为不按id查找feed是异常的):defself.fetch(feed_id
我真的只是不确定这意味着什么或我应该做什么才能让网页在我的本地主机上运行。现在它只是显示一个错误,上面写着“我们很抱歉,但出了点问题。”当我运行railsserver并在chrome中打开localhost:3000时。这是控制台输出:StartedGET"/users/sign_in"for127.0.0.1at2013-07-0512:07:07-0400ProcessingbyDevise::SessionsController#newasHTMLCompleted500InternalServerErrorin55msNoMethodError(undefinedmethod`
在Rails控制台中执行类似yGrau.all的命令时,我得到这些奇怪的!binary字符串而不是属性名称。知道如何解决这个问题吗?谢谢。irb(main):003:0>yGrau.all←[1m←[36mGrauLoad(0.0ms)←[0m←[1mSELECT"graus".*FROM"gr←[1m←[35mEXPLAIN(0.0ms)←[0mEXPLAINQUERYPLANSELECT"grauEXPLAINfor:SELECT"graus".*FROM"graus"0|0|0|SCANTABLEgraus(~1000000rows)----!ruby/object:Grauat