文章目录
最近想完成FPGA图像处理,由于没有开发板,就像通过仿真完成,之前像的是通过python 将图像转化为txt文本,最后利用verilog 读取txt文件导入,对像素点进行处理,然后将处理后像素数据写入txt,最后通过python转化为bmp位图,后来发现verilog可以直接读取bmp文件,并且将数据写入bmp文件。方便了很多。
BMP文件存储格式
bmp文件的存储格式是Windows系统中广泛使用的图像文件格式,对图像不做任何程度的压缩处理,主要分为位图头文件,位图信息头,调色板信息,像素数据四大部分,由于通常是处理RBG图像,因此仅讨论RGB的情况
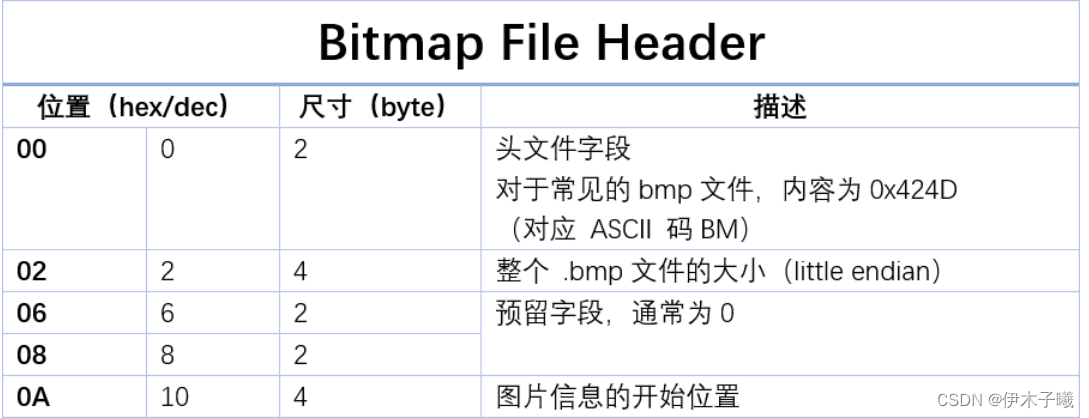
位图头文件 :文件的格式、大小等信息,前14Byte;主要关心的是图像尺寸,像素数据开始位置。
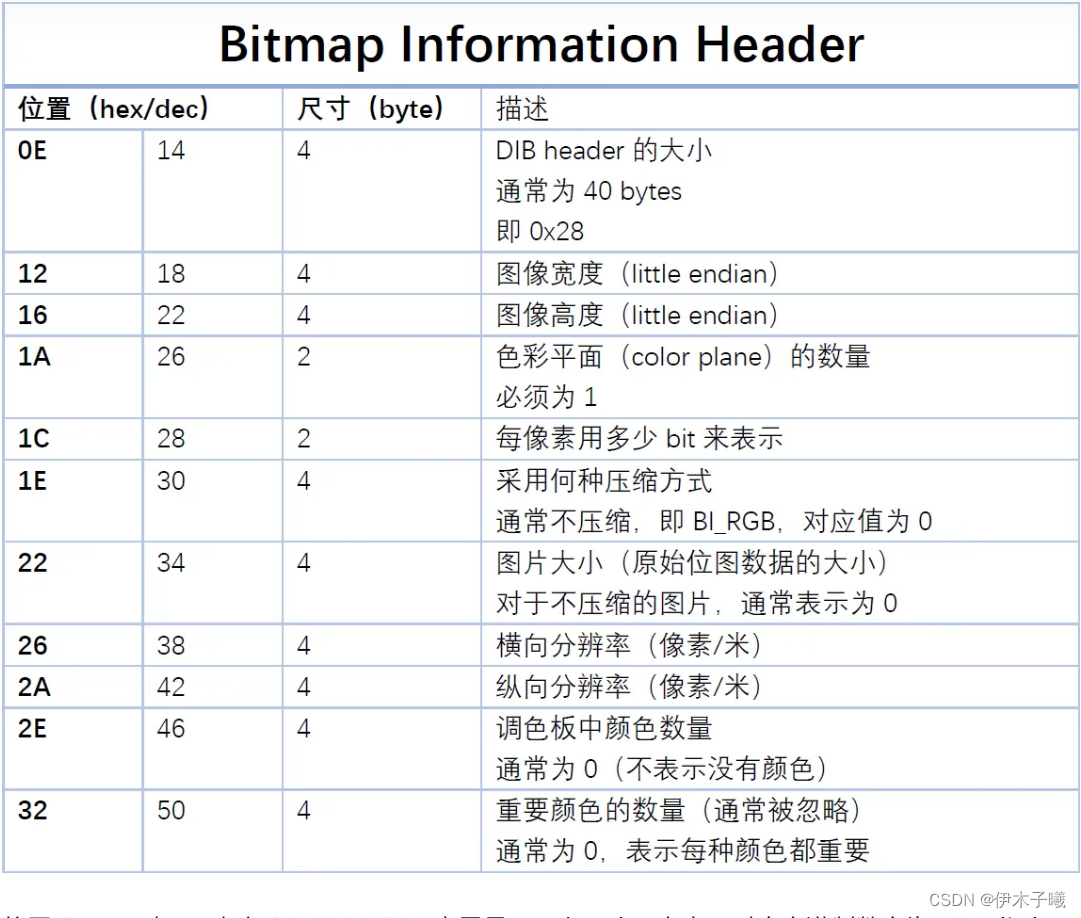
位图信息头: 提供图像数据的尺寸、位平面数、压缩方式、颜色索引等信息,前40Byte;主要关心的是图像宽度,图像高度。
调色板信息: 字,不关心
像素数据 : 像素数据,8bit一个像素数据,即1Byte。

我使用的是上面这个128*128
24位位图: 又名RGB真彩色图,又名RGB真彩色图,含2^24=16 777 216=16M色,没有彩色表。每个像素点由3个字节(十六进制码6位)表示,每个字节负责控制一种颜色,分别为蓝(Blue)、绿(Green)、红(Red)。
一幅256×256的24位位图大小计算方法:
位图文件头(14字节)+位图信息头(40字节)+实际像素点占内存(256×256×3字节)=196 662字节(Byte)
注意:
Windows有“补零”的习惯!即要求位图的每一行像素所占字节数必须被4整除。若不能倍4整除,则在该位图每一行的十六进制码末尾“补”1至3个字节的“00”。
例如:一幅宽253×高256的24位位图,微软在生成该图为实际文件时,计算每一行像素所占字节=宽253×3字节=759字节,检验其被4除余1,则在每行的十六进制码末尾加1个字节,补“00”,变为760字节。因此我们计算该图大小时应先判断是否“补零”,再得出算法:
该图大小=位图文件头(14字节)+位图信息头(40字节)+实际像素点占内存(高256×每行760字节)=194614字节(Byte)。
“补零”只针对位图的宽进行检验,一幅宽256×高253的24位位图,
其大小=位图文件头(14字节)+位图信息头(40字节)+实际像素点占内存(高253×每行768字节)=194358字节(Byte)< 196 662字节(Byte)。
只是把此图像的宽和高颠倒,图像所占内存竟然变小了。
/*******************************************************************************
* *
* (c) Copyright 1995-2017 TAIHO ELE Co,Ltd. *
* All rights reserved. *
* *
********************************************************************************
*
* FileName : top_tb.v
* Abstract : This module is an example for coding.
* Author : Mouhongbing
* Version : 1.1
* Release : 2022.9.29
* Revision :
* Version Date Author Modification description
* 1.0 Mouhongbing 2022.9.29
*
******************************************************************************/
`timescale 1ns / 1ns
module top_tb;
//图像属性:图像宽度 图像高度 图像尺寸 图像像素点起始位
integer bmp_width;
integer bmp_high;
integer bmp_size;
integer start_index;
//bmp file id
integer bmp_file_id;
integer bmp_dout_id;
integer dout_txt_id;
//文件句柄
integer h;
//文件bmp文件数据
reg [7:0] rd_data [0:49300];//根据自己图片大小
//写操作
reg [23:0] wr_data;
integer i = 0;
integer index;
initial
begin
clk=1'b1;
//打开原始图像
bmp_file_id = $fopen("D:\\python\\pic\\lena.bmp","rb");
//打开输出图像
bmp_dout_id = $fopen("D:\\python\\pic\\output_file.bmp","wb");
//打开输出数据
dout_txt_id = $fopen("D:\\python\\pic\\output_file.txt","w+");
//读取bmp文件
h = $fread(rd_data,bmp_file_id);
// 图像宽度
bmp_width = {rd_data[21], rd_data[20], rd_data[19], rd_data[18]};
// 图像宽度
bmp_high = {rd_data[25], rd_data[24], rd_data[23], rd_data[22]};
// 像素起始位置
start_index = {rd_data[13], rd_data[12], rd_data[11], rd_data[10]};
// 图像尺寸
bmp_size = {rd_data[5], rd_data[4], rd_data[3], rd_data[2]};
$fclose(bmp_file_id);
//输出BMP
for(i = 0; i < bmp_size; i = i + 1)begin
$fwrite(bmp_dout_id, "%c", rd_data[i]);//注意参数%c
end
$fclose(bmp_dout_id);
//输出txt,只存像素点
for(index = start_index; index < bmp_size-2; index = index + 3)begin
wr_data = {rd_data[index + 2], rd_data[index + 1], rd_data[index]};
$fwrite(dout_txt_id, "%d,", wr_data[7:0]);
$fwrite(dout_txt_id, "%d,", wr_data[15:8]);
$fwrite(dout_txt_id, "%d\n", wr_data[23:16]);
end
$fclose(dout_txt_id);
end
endmodule
图像转txt
import cv2 # h, w, c
import numpy
import matplotlib.pyplot as plt
img = cv2.imread("./pic/th.bmp" , 1)
print("图像的形状,返回一个图像的(行数,列数,通道数):", img.shape)
print("图像的像素数目:", img.size)
print("图像的数据类型:", img.dtype)
#img = cv2.resize(img,(280,280)) 可以改变图片的大小
fname = open("./pic/th.txt",'w')
# fname.write("图像的形状,返回一个图像的(行数,列数,通道数):"+str(img.shape)+'\n')
# fname.write("图像的像素数目:"+str(img.size)+'\n')
# fname.write("图像的数据类型:"+str(img.dtype)+'\n')
Ylenth = img.shape[1] # 图片列数
Xlenth = img.shape[0] # 图片行数
for i in range(Xlenth):
for j in range(Ylenth):
fname.write(str(img[i][j][0])+','+str(img[i][j][1])+','+str(img[i][j][2])+'\n')
# fname.write('\n')
fname.close()
cv2.imshow('image',img)
cv2.waitKey(0)
cv2.destroyAllWindows()
txt转bmp
# -*- coding:utf8 -
from PIL import Image
x = 128 #x坐标 通过对txt里的行数进行整数分解
y = 128 #y坐标 x*y=行数 13500行,150和900也可以
im = Image.new("RGB", (x,y))
file = open('./pic/output_file.txt')
for i in range(0,x):
for j in range(0,y):
#line = file.readline().replace('[','').replace(']','') #获取一行rgb值,并且把()都替换为空
line=file.readline()
rgb = line.split(",") #逗号分割
im.putpixel((i, j), (int(rgb[2]), int(rgb[1]), int(rgb[0]))) #(i,j)为坐标,后面的是像素点
file.close()
im.save("./pic/output_file.bmp")
我是Rails的新手,所以请原谅简单的问题。我正在为一家公司创建一个网站。那家公司想在网站上展示它的客户。我想让客户自己管理这个。我正在为“客户”生成一个表格,我想要的三列是:公司名称、公司描述和Logo。对于名称,我使用的是name:string但不确定如何在脚本/生成脚手架终端命令中最好地创建描述列(因为我打算将其设置为文本区域)和图片。我怀疑描述(我想成为一个文本区域)应该仍然是描述:字符串,然后以实际形式进行调整。不确定如何处理图片字段。那么……说来话长:我在脚手架命令中输入什么来生成描述和图片列? 最佳答案 对于“文本”数
我正在尝试找出一种方法来显示来自不在RAILS_ROOT下(在RedHat或Ubuntu环境中)的已安装文件系统的图像。我不想使用符号链接(symboliclink),因为这个应用程序实际上是通过Tomcat部署的,而当我关闭Tomcat时,Tomcat会尝试跟随符号链接(symboliclink)并删除挂载中的所有图像。由于这些文件的数量和大小,将图像放在public/images下也不是一种选择。我查看了send_file,但它只会显示一张图片。我需要在一个格式良好的页面中显示6个请求的图像。由于膨胀,我宁愿不使用Base64编码,但我不知道如何将图像数据与呈现的页面一起传递下去。
目录0专栏介绍1平面2R机器人概述2运动学建模2.1正运动学模型2.2逆运动学模型2.3机器人运动学仿真3动力学建模3.1计算动能3.2势能计算与动力学方程3.3动力学仿真0专栏介绍?附C++/Python/Matlab全套代码?课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索、采样法、智能算法等);局部规划(DWA、APF等);曲线优化(贝塞尔曲线、B样条曲线等)。?详情:图解自动驾驶中的运动规划(MotionPlanning),附几十种规划算法1平面2R机器人概述如图1所示为本文的研究本体——平面2R机器人。对参数进行如下定义:机器人广义坐标
一、机器人介绍 此处是基于MATLABRVC工具箱,对ABB-IRB-1200型号的微型机械臂进行正逆向运动学分析,并利Simulink工具实现对机械臂进行具有动力学参数的末端轨迹规划仿真,最后根据机械模型设计Simulink-Adams联合仿真。 图1.ABBIRB 1200尺寸参数示意图ABBIRB 1200提供的两种型号广泛适用于各作业,且两者间零部件通用,两种型号的工作范围分别为700 mm 和 900 mm,大有效负载分别为 7 kg 和5 kg。 IRB 1200 能够在狭小空间内能发挥其工作范围与性能优势,具有全新的设计、小型化的体积、高效的性能、易于集成、便捷的接
技术选型1,前端小程序原生MINA框架cssJavaScriptWxml2,管理后台云开发Cms内容管理系统web网页3,数据后台小程序云开发云函数云开发数据库(基于MongoDB)云存储4,人脸识别算法基于百度智能云实现人脸识别一,用户端效果图预览老规矩我们先来看效果图,如果效果图符合你的需求,就继续往下看,如果不符合你的需求,可以跳过。1-1,登录注册页可以看到登录页有注册入口,注册页如下我们的注册,需要管理员审核,审核通过后才可以正常登录使用小程序1-2,个人中心页登录成功以后,我们会进入个人中心页我们在个人中心页可以注册人脸,因为我们做人脸识别签到,需要先注册人脸才可以进行人脸比对,进
我想建立3步用户注册,在第2步上传头像。所以我遵循RyanBates的指南http://railscasts.com/episodes/217-multistep-forms.我正在使用CarrierWavegem来处理上传。但似乎我无法在用户session中存储上传的文件信息(我收到无法转储文件错误)。我在Controller中使用以下技术ifparams[:user][:img_path]@uploader=FirmImgUploader.new@uploader.store!(params[:user][:img_path])session[:img]=@uploaderpara
标题说明一切。 最佳答案 我正在使用MiniExiftool,它是Perl的Exiftool的ruby接口(interface)。https://github.com/janfri/mini_exiftoolhttp://www.sno.phy.queensu.ca/~phil/exiftool/用法:exif=MiniExiftool.new(file_path)exif.date_time_original=Time.nowexif["captionextract"]="Thisismynewcaption"exif.sav
FPGA时钟和时钟域时钟树所谓时钟树为FPGA内部资源,分:全局时钟树,区域时钟树,IO时钟树原则上优先使用全局时钟树,在GT接口上使用IO时钟树,一般工具也会对GT时钟加以限制;时钟树使用方式正确的物理连接FPGA会由物理管脚专门用于全局时钟设置,通过查询数据手册可以在PCB设计阶段进行确认,当外部时钟接入此管脚时,工具会自动占有全局时钟树资源,当接入普通信号时不会分配时钟树资源;恰当的代码描述原语的使用,即BUFG的使用,可以将PLL的输出等内部时钟进行全局时钟资源的分配;IO时钟资源需要参考相应接口手册,以ultrascale的GTH为例,其JESD204的时钟方案针对不同的子类会由不同
我需要在一台没有安装Excel的Linux服务器上读写(->转换)Excel文件。对于Python,存在http://www.python-excel.org/.Ruby有类似的东西吗?可能不需要处理最新的Office格式。只需旧的xls文件就足够了。 最佳答案 我同意Gonzih的观点,并且我经常使用roo。它允许我使用模板文件进行读取、写入和写入。该项目在他们的site上有很好的记录。.我总是使用类似的东西:input=Excel.new(path)output=Array.newinput.default_sheet=inpu
我的表单通过POST接收数据。当我执行putsparams时,我可以看到:{"id"=>"123","id2"=>"456"}现在是命令:putsparams['id']#=>123putsparams[:id]#=>123params['id']='999'putsparams#=>{"id"=>"999","id2"=>"456"}但是当我这样做的时候:params[:id]='888'putsparams我明白了{"id"=>"999","id2"=>"456",:id=>"888"}在IRB中它工作正常:params#=>{"id2"=>"2","id"=>"1"}params