文章目录
Eigen —— 参考指南
Eigen库学习教程(全)
Eigen教程:1 Eigen简介和矩阵常见操作
Eigen学习教程(一)
Eigen学习教程(二)
Eigen学习教程(三)
Eigen学习教程(四)
Eigen教程-Github
模块与头文件
| 模块 | 头文件 | 内容 |
|---|---|---|
| Core | #include <Eigen/Core> | 矩阵和数组 (向量) 类 (Matrix, Array),基本的线性代数运算和数组操作 |
| Geometry | #include <Eigen/Geometry> | 变换,平移,缩放,2D 旋转和 3D 旋转 (包括四元数和角轴) |
| LU | #include <Eigen/LU> | 使用求解器进行求逆,行列式,LU 分解操作 |
| Cholesky | #include <Eigen/Cholesky> | 使用求解器进行 LLT, LT, Cholesky 分解 |
| Householder | #include <Eigen/Householder> | Householder 变换;被用作几个线性代数模块 |
| SVD | #include <Eigen/Cholesky> | SVD 分解与最小二乘求解器 |
| QR | #include <Eigen/QR> | QR 分解 |
| Eigenvalues | #include <EIgen/Eigenvalues> | 特征值,特征向量分解 |
| Sparse | #include <Eigen/Sparse> | 稀疏矩阵存储以及相关的基本线性代数 |
| Dense | #include <Eigen/Dense> | 包括 Core, Geometry, LU, Cholesky, SVD, QR, Eigenvalues 的头文件 |
| Eigen | #include <Eigen/Eigen> | 包括 Dense 和 Sparse 的头文件 |
#include <Eigen/Dense>就够了1、原因分析
2、解决办法
将#include<Eigen/Core> 改写成 #include<eigen3/Eigen/Core>
将#include<Eigen/Dense> 改写成 #include<eigen3/Eigen/Dense>
第二种
在CMakeLists中添加include_directories(“/usr/include/eigen3”)
因为eigen3被默认安装到了usr/include里了(系统默认的路径),在很多程序中include时经常使用#include<Eigen/Dense>而不是使用#include<eigen3/Eigen/Dense>所以要做一下处理,否则有些程序在编译时找不到Eigen/Dense而报错。上面指令将usr/include/eigen3文件夹中的Eigen文件递归的复制到上一层文件(直接放到/usr/include中,否则系统无法默认搜索到----->此时只能在CMakeLists.txt用include_libraries(绝对路径了))
sudo cp -r /usr/include/eigen3/Eigen /usr/include
#include <Eigen/Dense> // 基本函数只需要包含这个头文件
Matrix<double, 3, 3> A; // 固定了行数和列数的矩阵和Matrix3d一致.
Matrix<double, 3, Dynamic> B; // 固定行数.
Matrix<double, Dynamic, Dynamic> C; // 和MatrixXd一致.
Matrix<double, 3, 3, RowMajor> E; // 按行存储; 默认按列存储.
Matrix3f P, Q, R; // 3x3 float 矩阵.
Vector3f x, y, z; // 3x1 float 列向量.
RowVector3f a, b, c; // 1x3 float 行向量.
VectorXd v; // 动态长度double型列向量
// Eigen // Matlab // comments
x.size() // length(x) // 向量的长度
C.rows() // size(C,1) // 矩阵的行数
C.cols() // size(C,2) // 矩阵的列数
x(i) // x(i+1) // 访问向量元素(Matlab的下标从1开始计数)
C(i,j) // C(i+1,j+1) // 访问矩阵元素
A.resize(4, 4); // 如果越界触发运行时错误.
B.resize(4, 9); // 如果越界触发运行时错误.
A.resize(3, 3); // Ok; 没有越界.
B.resize(3, 9); // Ok; 没有越界.
A << 1, 2, 3, // 初始化A,元素也可以是矩阵,先按列堆叠,再按行堆叠。(从左到右,从上到下)
4, 5, 6,
7, 8, 9;
B << A, A, A; // B 是3个A水平排列
A.fill(10); // 将A的所有元素填充为10
// Eigen // Matlab 注释
MatrixXd::Identity(rows,cols) // eye(rows,cols) //单位矩阵
C.setIdentity(rows,cols) // C = eye(rows,cols) //单位矩阵
MatrixXd::Zero(rows,cols) // zeros(rows,cols) //全零矩阵
C.setZero(rows,cols) // C = zeros(rows,cols) //全零矩阵
MatrixXd::Ones(rows,cols) // ones(rows,cols) //全一矩阵
C.setOnes(rows,cols) // C = ones(rows,cols) //全一矩阵
MatrixXd::Random(rows,cols) // rand(rows,cols)*2-1 //MatrixXd::Random 返回范围为(-1, 1)的均匀分布的随机数
C.setRandom(rows,cols) // C = rand(rows,cols)*2-1 //返回范围为(-1, 1)的均匀分布的随机数
VectorXd::LinSpaced(size,low,high) // linspace(low,high,size)' //返回size个等差数列,第一个数为low,最后一个数为high
v.setLinSpaced(size,low,high) // v = linspace(low,high,size)' //返回size个等差数列,第一个数为low,最后一个数为high
VectorXi::LinSpaced(((hi-low)/step)+1, // low:step:hi //以step为步长的等差数列。((hi-low)/step)+1为个数
low,low+step*(size-1)) //
// Matrix 切片和块。下面列出的所有表达式都是可读/写的。
// 使用模板参数更快(如第2个)。注意:Matlab是的下标是从1开始的。
// Eigen // Matlab // 注释
x.head(n) // x(1:n) //前n个元素
x.head<n>() // x(1:n) //前n个元素
x.tail(n) // x(end - n + 1: end) //倒数n个元素
x.tail<n>() // x(end - n + 1: end) //倒数n个元素
x.segment(i, n) // x(i+1 : i+n) //切片
x.segment<n>(i) // x(i+1 : i+n) //切片
P.block(i, j, rows, cols) // P(i+1 : i+rows, j+1 : j+cols) //块
P.block<rows, cols>(i, j) // P(i+1 : i+rows, j+1 : j+cols) //块
P.row(i) // P(i+1, :) //第i行
P.col(j) // P(:, j+1) //第j列
P.leftCols<cols>() // P(:, 1:cols) //前cols列
P.leftCols(cols) // P(:, 1:cols) //前cols列
P.middleCols<cols>(j) // P(:, j+1:j+cols) //中间cols列
P.middleCols(j, cols) // P(:, j+1:j+cols) //中间cols列
P.rightCols<cols>() // P(:, end-cols+1:end) //后cols列
P.rightCols(cols) // P(:, end-cols+1:end) //后cols列
P.topRows<rows>() // P(1:rows, :) //前rows行
P.topRows(rows) // P(1:rows, :) //前rows行
P.middleRows<rows>(i) // P(i+1:i+rows, :) //中间rows行
P.middleRows(i, rows) // P(i+1:i+rows, :) //中间rows行
P.bottomRows<rows>() // P(end-rows+1:end, :) //最后rows行
P.bottomRows(rows) // P(end-rows+1:end, :) //最后rows行
P.topLeftCorner(rows, cols) // P(1:rows, 1:cols) //左上角块
P.topRightCorner(rows, cols) // P(1:rows, end-cols+1:end) //右上角块
P.bottomLeftCorner(rows, cols) // P(end-rows+1:end, 1:cols) //左下角块
P.bottomRightCorner(rows, cols) // P(end-rows+1:end, end-cols+1:end) //右下角块
P.topLeftCorner<rows,cols>() // P(1:rows, 1:cols) //左上角块
P.topRightCorner<rows,cols>() // P(1:rows, end-cols+1:end) //右上角块
P.bottomLeftCorner<rows,cols>() // P(end-rows+1:end, 1:cols) //左下角块
P.bottomRightCorner<rows,cols>() // P(end-rows+1:end, end-cols+1:end) //右下角块
// 特别说明:Eigen的交换函数进行了高度优化
// Eigen // Matlab
R.row(i) = P.col(j); // R(i, :) = P(:, j)
R.col(j1).swap(mat1.col(j2)); // R(:, [j1 j2]) = R(:, [j2, j1]) //交换列
// Views, transpose, etc;
// Eigen // Matlab
R.adjoint() // R' // 共轭转置
R.transpose() // R.' or conj(R') // 可读/写 转置
R.diagonal() // diag(R) // 可读/写 获取对角元素
x.asDiagonal() // diag(x) // diag(x)对角阵(通过x中元素作为对角元素(构建对角矩阵)这里x必须为VectorXX类型不能为矩阵)
R.transpose().colwise().reverse() // rot90(R) // 可读/写 逆时针旋转90度
R.rowwise().reverse() // fliplr(R) // 水平翻转
R.colwise().reverse() // flipud(R) // 垂直翻转
R.replicate(i,j) // repmat(P,i,j) // 复制矩阵,垂直复制i个,水平复制j个
// 四则运算,和Matlab相同。但Matlab中不能使用*=这样的赋值运算符
// 矩阵 - 向量 矩阵 - 矩阵 矩阵 - 标量
y = M*x; R = P*Q; R = P*s;
a = b*M; R = P - Q; R = s*P;
a *= M; R = P + Q; R = P/s;
R *= Q; R = s*P;
R += Q; R *= s;
R -= Q; R /= s;
// 逐元素操作Vectorized operations on each element independently
// Eigen // Matlab //注释
R = P.cwiseProduct(Q); // R = P .* Q //逐元素乘法
R = P.array() * s.array(); // R = P .* s //逐元素乘法(s为标量)
R = P.cwiseQuotient(Q); // R = P ./ Q //逐元素除法
R = P.array() / Q.array(); // R = P ./ Q //逐元素除法
R = P.array() + s.array(); // R = P + s //逐元素加法(s为标量)
R = P.array() - s.array(); // R = P - s //逐元素减法(s为标量)
R.array() += s; // R = R + s //逐元素加法(s为标量)
R.array() -= s; // R = R - s //逐元素减法(s为标量)
R.array() < Q.array(); // R < Q //逐元素比较运算
R.array() <= Q.array(); // R <= Q //逐元素比较运算
R.cwiseInverse(); // 1 ./ P //逐元素取倒数
R.array().inverse(); // 1 ./ P //逐元素取倒数
R.array().sin() // sin(P) //逐元素计算正弦函数
R.array().cos() // cos(P) //逐元素计算余弦函数
R.array().pow(s) // P .^ s //逐元素计算幂函数
R.array().square() // P .^ 2 //逐元素计算平方
R.array().cube() // P .^ 3 //逐元素计算立方
R.cwiseSqrt() // sqrt(P) //逐元素计算平方根
R.array().sqrt() // sqrt(P) //逐元素计算平方根
R.array().exp() // exp(P) //逐元素计算指数函数
R.array().log() // log(P) //逐元素计算对数函数
R.cwiseMax(P) // max(R, P) //逐元素计算R和P的最大值
R.array().max(P.array()) // max(R, P) //逐元素计算R和P的最大值
R.cwiseMin(P) // min(R, P) //逐元素计算R和P的最小值
R.array().min(P.array()) // min(R, P) //逐元素计算R和P的最小值
R.cwiseAbs(P) // abs(P) //逐元素计算R和P的绝对值
R.array().abs() // abs(P) //逐元素计算绝对值
R.cwiseAbs2() // abs(P.^2) //逐元素计算平方
R.array().abs2() // abs(P.^2) //逐元素计算平方
(R.array() < s).select(P,Q); // (R < s ? P : Q) //根据R的元素值是否小于s,选择P和Q的对应元素
R = (Q.array()==0).select(P,A) // R(Q==0) = P(Q==0) R(Q!=0) = P(Q!=0) //根据Q中元素等于零的位置选择P中元素
R = P.unaryExpr(ptr_fun(func)) // R = arrayfun(func, P) // 对P中的每个元素应用func函数
// Reductions.
int r, c;
// Eigen // Matlab //注释
R.minCoeff() // min(R(:)) //最小值
R.maxCoeff() // max(R(:)) //最大值
s = R.minCoeff(&r, &c) // [s, i] = min(R(:)); [r, c] = ind2sub(size(R), i); //计算最小值和它的位置
s = R.maxCoeff(&r, &c) // [s, i] = max(R(:)); [r, c] = ind2sub(size(R), i); //计算最大值和它的位置
R.sum() // sum(R(:)) //求和(所有元素)
R.colwise().sum() // sum(R) //按列求和
R.rowwise().sum() // sum(R, 2) or sum(R')' //按行求和
R.prod() // prod(R(:)) //累积
R.colwise().prod() // prod(R) //按列累积
R.rowwise().prod() // prod(R, 2) or prod(R')' //按行累积
R.trace() // trace(R) //迹
R.all() // all(R(:)) //是否所有元素都非零
R.colwise().all() // all(R) //按列判断,是否该列所有元素都非零
R.rowwise().all() // all(R, 2) //按行判断,是否该行所有元素都非零
R.any() // any(R(:)) //是否有元素非零
R.colwise().any() // any(R) //按列判断,是否该列有元素都非零
R.rowwise().any() // any(R, 2) //按行判断,是否该行有元素都非零
// 点积,范数等
// Eigen // Matlab // 注释
x.norm() // norm(x) //范数(注意:Eigen中没有norm(R))
x.squaredNorm() // dot(x, x) //平方和(注意:对于复数而言,不等价)
x.dot(y) // dot(x, y) //点积
x.cross(y) // cross(x, y) //交叉积,需要头文件 #include <Eigen/Geometry>
// 类型转换
// Eigen // Matlab // 注释
A.cast<double>(); // double(A) //变成双精度类型
A.cast<float>(); // single(A) //变成单精度类型
A.cast<int>(); // int32(A) //编程整型
A.real(); // real(A) //实部
A.imag(); // imag(A) //虚部
// 如果变换前后的类型相同,不做任何事情。
// 注意:Eigen中,绝大多数的涉及多个操作数的运算都要求操作数具有相同的类型
MatrixXf F = MatrixXf::Zero(3,3);
A += F; // 非法。Matlab中允许。(单精度+双精度)
A += F.cast<double>(); // 将F转换成double,并累加。(一般都是在使用时临时转换)
// Eigen 可以将已存储数据的缓存 映射成 Eigen矩阵
float array[3];
Vector3f::Map(array).fill(10); // create a temporary Map over array and sets entries to 10
int data[4] = {1, 2, 3, 4};
Matrix2i mat2x2(data); // 将 data 复制到 mat2x2
Matrix2i::Map(data) = 2*mat2x2; // 使用 2*mat2x2 覆写data的元素
MatrixXi::Map(data, 2, 2) += mat2x2; // 将 mat2x2 加到 data的元素上 (当编译时不知道大小时,可选语法)
// Solve Ax = b. Result stored in x. Matlab: x = A \ b.
x = A.ldlt().solve(b)); // #include <Eigen/Cholesky>LDLT分解法实际上是Cholesky分解法的改进
x = A.llt() .solve(b)); // A sym. p.d. #include <Eigen/Cholesky>
x = A.lu() .solve(b)); // Stable and fast. #include <Eigen/LU>
x = A.qr() .solve(b)); // No pivoting. #include <Eigen/QR>
x = A.svd() .solve(b)); // Stable, slowest. #include <Eigen/SVD>
// .ldlt() -> .matrixL() and .matrixD()
// .llt() -> .matrixL()
// .lu() -> .matrixL() and .matrixU()
// .qr() -> .matrixQ() and .matrixR()
// .svd() -> .matrixU(), .singularValues(), and .matrixV()
// Eigen // Matlab
A.eigenvalues(); // eig(A);特征值
EigenSolver<Matrix3d> eig(A); // [vec val] = eig(A)
eig.eigenvalues(); // diag(val)与前边的是一样的结果
eig.eigenvectors(); // vec 特征值对应的特征向量
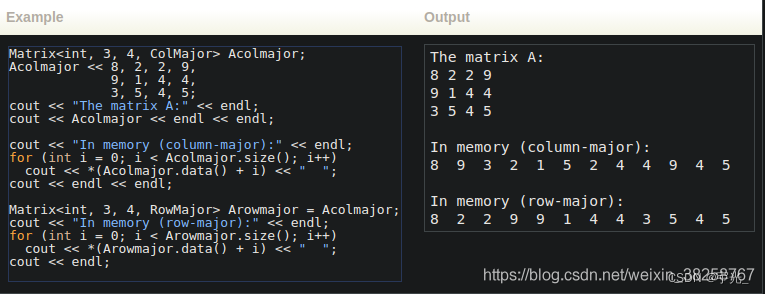
在Eigen中矩阵的存储默认是列优先的,但也可以设置为行优先:
Matrix<double, 6, Dynamic, RowMajor> mat;
行优先与列优先在使用上没有区别,但是如果按列访问,列优先因为存储位置相邻会比行优先更快些。
EIGEN_MAKE_ALIGNED_OPERATOR_NEW,具体见 Eigen 官网class Foo
{
//...
Eigen::Vector4d v;
//...
};
//...
Foo *foo = new Foo;
改为:
class Foo
{
...
Eigen::Vector4d v;
...
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
};
...
Foo *foo = new Foo;
std::vector, std::map)包含Eigen数据结构,需要添加 Eigen::aligned_allocator,具体见Eigen 官网std::map<int, Eigen::Vector4d>
改为:
std::map<int, Eigen::Vector4d, std::less<int>, Eigen::aligned_allocator<std::pair<const int, Eigen::Vector4d> > >
void my_function(Eigen::Vector2d v);
改为:
void my_function(const Eigen::Vector2d& v);
noalias()和eval()解决矩阵运算中的混淆问题混淆问题的解决办法
noalias()来提效。eval()和xxxInPlace()函数解决。
Vector3.normalized的特点是当前向量是不改变的并且返回一个新的规范化的向量;Vector3.Normalize的特点是改变当前向量,也就是当前向量长度是1
//旋转角为alpha(顺时针),旋转轴为(x,y,z)
Eigen::AngleAxisd rotation_vector(alpha,Vector3d(x,y,z))
Eigen::AngleAxisd yawAngle(alpha,Vector3d::UnitZ());
Eigen::Matrix3d rotation_matrix;
rotation_matrix = rotation_vector.matrix();
Eigen::Matrix3d rotation_matrix;
rotation_matrix = rotation_vector.toRotationMatrix();
Eigen::Vector3d eulerAngle = rotation_vector.matrix().eulerAngles(0,1,2);
Eigen::Quaterniond quaternion(rotation_vector);
Eigen::Quaterniond quaternion;
quaternion = rotation_vector;
Eigen::Matrix3d rotation_matrix;
rotation_matrix << x_00, x_01, x_02, x_10, x_11, x_12, x_20, x_21, x_22;
Eigen::AngleAxisd rotation_vector(rotation_matrix);
Eigen::AngleAxisd rotation_vector;
rotation_vector = rotation_matrix;
Eigen::AngleAxisd rotation_vector;
rotation_vector.fromRotationMatrix(rotation_matrix);
Eigen::Vector3d eulerAngle = rotation_matrix.eulerAngles(0,1,2);
Eigen::Quaterniond quaternion(rotation_matrix);
Eigen::Quaterniond quaternion;
quaternion = rotation_matrix;
Eigen::Vector3d eulerAngle(roll,pitch,yaw);
Eigen::AngleAxisd rollAngle(AngleAxisd(eulerAngle(0),Vector3d::UnitX()));
Eigen::AngleAxisd pitchAngle(AngleAxisd(eulerAngle(1),Vector3d::UnitY()));
Eigen::AngleAxisd yawAngle(AngleAxisd(eulerAngle(2),Vector3d::UnitZ()));
Eigen::AngleAxisd rotation_vector;
rotation_vector = yawAngle*pitchAngle*rollAngle;
Eigen::AngleAxisd rollAngle(AngleAxisd(eulerAngle(0),Vector3d::UnitX()));
Eigen::AngleAxisd pitchAngle(AngleAxisd(eulerAngle(1),Vector3d::UnitY()));
Eigen::AngleAxisd yawAngle(AngleAxisd(eulerAngle(2),Vector3d::UnitZ()));
Eigen::Matrix3d rotation_matrix;
rotation_matrix = yawAngle*pitchAngle*rollAngle;
Eigen::AngleAxisd rollAngle(AngleAxisd(eulerAngle(0),Vector3d::UnitX()));
Eigen::AngleAxisd pitchAngle(AngleAxisd(eulerAngle(1),Vector3d::UnitY()));
Eigen::AngleAxisd yawAngle(AngleAxisd(eulerAngle(2),Vector3d::UnitZ()));
Eigen::Quaterniond quaternion;
quaternion = yawAngle*pitchAngle*rollAngle;
Eigen::Quaterniond quaternion(w,x,y,z);
Eigen::AngleAxisd rotation_vector(quaternion);
Eigen::AngleAxisd rotation_vector;
rotation_vector = quaternion;
Eigen::Matrix3d rotation_matrix;
rotation_matrix = quaternion.matrix();
Eigen::Matrix3d rotation_matrix;
rotation_matrix = quaternion.toRotationMatrix();
Eigen::Vector3d eulerAngle = quaternion.matrix().eulerAngles(0,1,2);
Isometry3d T = Isometry3d::Identity();
T.rotate(rotation_vector1);
T.pretranslate(t);
cout<<"齐次欧式变换:\n"<<T.matrix()<<endl;
大约一年前,我决定确保每个包含非唯一文本的Flash通知都将从模块中的方法中获取文本。我这样做的最初原因是为了避免一遍又一遍地输入相同的字符串。如果我想更改措辞,我可以在一个地方轻松完成,而且一遍又一遍地重复同一件事而出现拼写错误的可能性也会降低。我最终得到的是这样的:moduleMessagesdefformat_error_messages(errors)errors.map{|attribute,message|"Error:#{attribute.to_s.titleize}#{message}."}enddeferror_message_could_not_find(obje
我想在一个没有Sass引擎的类中使用Sass颜色函数。我已经在项目中使用了sassgem,所以我认为搭载会像以下一样简单:classRectangleincludeSass::Script::FunctionsdefcolorSass::Script::Color.new([0x82,0x39,0x06])enddefrender#hamlengineexecutedwithcontextofself#sothatwithintemlateicouldcall#%stop{offset:'0%',stop:{color:lighten(color)}}endend更新:参见上面的#re
我正在尝试用ruby中的gsub函数替换字符串中的某些单词,但有时效果很好,在某些情况下会出现此错误?这种格式有什么问题吗NoMethodError(undefinedmethod`gsub!'fornil:NilClass):模型.rbclassTest"replacethisID1",WAY=>"replacethisID2andID3",DELTA=>"replacethisID4"}end另一个模型.rbclassCheck 最佳答案 啊,我找到了!gsub!是一个非常奇怪的方法。首先,它替换了字符串,所以它实际上修改了
我有一些代码在几个不同的位置之一运行:作为具有调试输出的命令行工具,作为不接受任何输出的更大程序的一部分,以及在Rails环境中。有时我需要根据代码的位置对代码进行细微的更改,我意识到以下样式似乎可行:print"Testingnestedfunctionsdefined\n"CLI=trueifCLIdeftest_printprint"CommandLineVersion\n"endelsedeftest_printprint"ReleaseVersion\n"endendtest_print()这导致:TestingnestedfunctionsdefinedCommandLin
如何在Ruby中按名称传递函数?(我使用Ruby才几个小时,所以我还在想办法。)nums=[1,2,3,4]#Thisworks,butismoreverbosethanI'dlikenums.eachdo|i|putsiend#InJS,Icouldjustdosomethinglike:#nums.forEach(console.log)#InF#,itwouldbesomethinglike:#List.iternums(printf"%A")#InRuby,IwishIcoulddosomethinglike:nums.eachputs在Ruby中能不能做到类似的简洁?我可以只
?博客主页:https://xiaoy.blog.csdn.net?本文由呆呆敲代码的小Y原创,首发于CSDN??学习专栏推荐:Unity系统学习专栏?游戏制作专栏推荐:游戏制作?Unity实战100例专栏推荐:Unity实战100例教程?欢迎点赞?收藏⭐留言?如有错误敬请指正!?未来很长,值得我们全力奔赴更美好的生活✨------------------❤️分割线❤️-------------------------
说在前面这部分我本来是合为一篇来写的,因为目的是一样的,都是通过独立按键来控制LED闪灭本质上是起到开关的作用,即调用函数和中断函数。但是写一篇太累了,我还是决定分为两篇写,这篇是调用函数篇。在本篇中你主要看到这些东西!!!1.调用函数的方法(主要讲语法和格式)2.独立按键如何控制LED亮灭3.程序中的一些细节(软件消抖等)1.调用函数的方法思路还是比较清晰地,就是通过按下按键来控制LED闪灭,即每按下一次,LED取反一次。重要的是,把按键与LED联系在一起。我打算用K1来作为开关,看了一下开发板原理图,K1连接的是单片机的P31口,当按下K1时,P31是与GND相连的,也就是说,当我按下去时
项目介绍随着我国经济迅速发展,人们对手机的需求越来越大,各种手机软件也都在被广泛应用,但是对于手机进行数据信息管理,对于手机的各种软件也是备受用户的喜爱小学生兴趣延时班预约小程序的设计与开发被用户普遍使用,为方便用户能够可以随时进行小学生兴趣延时班预约小程序的设计与开发的数据信息管理,特开发了小程序的设计与开发的管理系统。小学生兴趣延时班预约小程序的设计与开发的开发利用现有的成熟技术参考,以源代码为模板,分析功能调整与小学生兴趣延时班预约小程序的设计与开发的实际需求相结合,讨论了小学生兴趣延时班预约小程序的设计与开发的使用。开发环境开发说明:前端使用微信微信小程序开发工具:后端使用ssm:VU
我需要一个通过输入字符串进行计算的方法,像这样function="(a/b)*100"a=25b=50function.something>>50有什么方法吗? 最佳答案 您可以使用instance_eval:function="(a/b)*100"a=25.0b=50instance_evalfunction#=>50.0请注意,使用eval本质上是不安全的,尤其是当您使用外部输入时,因为它可能包含注入(inject)的恶意代码。另请注意,a设置为25.0而不是25,因为如果它是整数a/b将导致0(整数)。
Rails相对较新。我正在尝试调用一个API,它应该向我返回一个唯一的URL。我的应用程序中捆绑了HTTParty。我已经创建了一个UniqueNumberController,并且我已经阅读了几个HTTParty指南,直到我想要什么,但也许我只是有点迷路,真的不知道该怎么做。基本上,我需要做的就是调用API,获取它返回的URL,然后将该URL插入到用户的数据库中。谁能给我指出正确的方向或与我分享一些代码? 最佳答案 假设API为JSON格式并返回如下数据:{"url":"http://example.com/unique-url"