一、背景
随着人们的生活水平不断提高,汽车数量日益增加。随之而来的管理难度逐渐增大,对车牌检测有了越来越高的需求,比如:在汽车违法检测、停车场的入口检测等都需要车牌检测进行辅助管理。中国车牌根据颜色可划分为五种颜色:蓝色、黄色、白色、黑色、绿色。根据车牌层数可以分为单层和双层车牌,还可以更加细分为以下类别:
考虑到目前实际生活中的实际情况以及开源的车牌数据集的原因,仅实现对蓝色、黄色、绿色的单层车牌进行车牌检测,白色和黑色车牌检测效果不佳。
二、开发环境与库函数说明
采用Python语言编写,使用到的库函数较多。这里仅介绍主要使用的库:
tkinter:tkinter模块是Python的标准Tk GUI工具包的接口。GUI界面采用该工具包。
opencv-python:是一个Python绑定库,旨在解决计算机视觉问题。在实现传统图像处理方法检测车牌中使用大量使用到。
torch:是深度学习神经网络中常用的库。在实现YOLOv5算法检测车牌中使用到。
tensorflow:tensorflow是Google推出的机器学习开源神器,拥有各种各样的模型和算法。在实现CNN对车牌字符识别中使用到。
还使用到了许多其他库,这里就不一一介绍了,详情可见代码中的requirements.txt文件。
三、编程思想介绍
本次课程设计采用模块化设计,将程序GUI和具体算法的实现进行分隔,将每一个识别算法进行封装,互不影响。各模块调用关系流程图如图1所示:
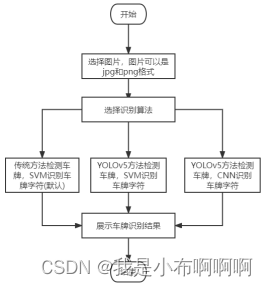
图1 各模块调用关系图
四、程序设计过程
程序可以划分为GUI模块、传统方法检测车牌+SVM识别车牌字符模块、YOLOv5方法检测车牌+SVM识别车牌字符模块、YOLOv5方法检测车牌+CNN识别车牌字符模块等四大模块,下面将进行详细介绍。
1.GUI模块
GUI模块采用tkinter库实现界面,由于界面不是重点,所以界面设计得比较简约。界面效果如图2所示:

图2 界面效果图
界面主要包含原图、车牌位置、识别结果、选择识别算法、选择图片等组件。由于界面布局比较简单,在此不对代码逻辑进行介绍。使用时需注意当没有选择图片时,无法选择识别算法,识别算法默认选择“传统方法检测车牌+SVM识别车牌字符”算法。当选择图片后,可以随意更改识别算法。
2.传统方法检测车牌+SVM识别车牌字符模块
该模块可以细分为两个子模块,分别是传统方法检测车牌和识别车牌字符模块。传统方法检测车牌模块使用图像处理方法负责在一张图像中检测出车牌,识别车牌字符模块使用SVM算法负责识别车牌中的字符。
(1)以图3为例,下面介绍传统方法检测车牌做了哪些工作:
①调整图片比例,进行高斯去噪,并将图片转换为灰度图。处理后的效果图如图4所示:


图3 原图 图4 去噪后的灰度图
②进行形态变化,并将变化后的图像和灰度图两幅图像合成为一幅图像。处理后的效果图如图5所示:


图5 形态变化后的效果图
③先对图像进行阈值处理,再使用cv2.Canny函数进行边缘检测。处理后的效果图如图6所示:

图6 边缘检测后的效果图
④查找图像边缘整体形成的矩形区域,可能有很多,可以根据长宽比例是否是2~2.5之间进行排除那些不是矩形的区域。
⑤矩形区域可能是倾斜的矩形,所以先进行矫正,然后根据颜色定位,排除不是车牌的矩形,目前只识别蓝、绿、黄车牌。
⑥检测到车牌位置后,再根据车牌颜色再定位,缩小边缘非车牌边界。得到车牌如图7所示:

图7 检测到的车牌
(2)在检测到车牌后,紧接着对车牌进行字符识别的工作:
①将车牌转换为灰度图,并根据车牌颜色进行处理。由于黄、绿车牌字符比背景暗,蓝车牌刚好相反,所以黄、绿车牌需要进行反向处理。处理好后的效果图如图8所示:

图8 处理后的车牌
②对字符进行分割。首先进行水平投影,将二值化的车牌图片水平投影到Y轴,得到连续投影最长的一段作为字符区域,因为车牌四周有白色的边缘,这里可以把水平方向上的连续白线过滤掉。然后进行垂直投影,因为字符与字符之间总会分隔一段距离,因此可以作为水平分割的依据,分割后的字符宽度必须达到平均宽度才能算作一个字符,这里可以排除车牌第2、3字符中间的“.”。
③将分割后的字符进行预测,使用训练好的svmchinese.dat对车牌中的中文字符进行预测,使用训练好的svm.dat对车牌中的英文和数字字符进行预测,得到预测结果为['京','A','D','7','Z','9','7','2']。预测结果中,有一点小错误,是因为训练SVM模型的数据集太少的原因,导致结果不准确。程序GUI显示的效果图如图9所示:

图9 GUI显示的效果图
2.YOLOv5方法检测车牌+SVM识别车牌字符
该模块可以细分为两个子模块,分别是YOLOv5方法检测车牌和识别车牌字符模块。YOLOv5方法检测车牌模块使用YOLOv5模型负责在一张图像中检测出车牌,识别车牌字符模块使用SVM算法负责识别车牌中的字符。SVM算法识别车牌中的字符的过程在上一个小节描述了,在这儿不再赘述了。
YOLOv5模型Ultralytics公司于2020年6月9日公开发布的。YOLOv5模型是基于YOLOv3模型基础上改进而来的,有YOLOv5s、YOLOv5m、YOLOv5l、YOLOv5四个模型。YOLOv5模型由骨干网络、颈部和头部组成。是计算机视觉界十分流行的模型,由于模型较大同时数据集也很大,导致训练时间非常长,本次课程设计采用在CCPD数据集上预训练好的模型作为车牌检测模型。
①加载预训练好的模型,检测出车牌的四个角的坐标,检测效果图如图10所示,红框中即是检测出的车牌。

图10 车牌检测的效果图
②检测出车牌后,将车牌截取出来,截取出的车牌如图11所示。截取出的车牌再使用SVM模型进行字符识别。
图11 截取出的车牌效果图
3.YOLOv5方法检测车牌+CNN识别车牌字符
该模块可以细分为两个子模块,分别是YOLOv5方法检测车牌和识别车牌字符模块。YOLOv5方法检测车牌模块使用YOLOv5模型负责在一张图像中检测出车牌,识别车牌字符模块使用CNN算法负责识别车牌中的字符。YOLOv5模型检测车牌的过程在上一个小节描述了,在这儿不再赘述了。
CNN算法是卷积神经网络(Convolutional Neural Networks,简称CNN)。现在,CNN已经成为众多科学领域的研究热点之一。卷积神经网络CNN的结构一般包含这几层:
1)输入层:用于数据的输入。
2)卷积层:使用卷积核进行特征提取和特征映射。
3)激活层:由于卷积也是一种线性运算,因此需要增加非线性映射。
4)池化层:进行下采样,对特征图稀疏处理,减少数据运算量。
5)全连接层:通常在CNN的尾部进行重新拟合,减少特征信息的损失。
6)输出层:输出模型预测的结果。
采用Tensorflow库搭建CNN模型,由于CCPD数据集庞大,训练时间久,受于实验设备和时间的影响,采用在CCPD数据集上预训练好的模型作为车牌字符识别模型。但是由于该预训练模型训练轮次不够,同时由于数据集黄色和绿色牌照的数量较少,导致模型对黄色和绿色牌照的检测效果十分差,但是蓝色牌照识别准确率很高。
五、实验结果
1.程序运行效果:
程序运行的初始界面如图12所示。当未选择图片时,“选择识别算法”下的单选框处于禁用状态,默认选择“传统方法检测车牌,SVM识别车牌字符”。

图12 程序运行的初始界面
在选择图片后,可根据需要切换识别算法,在“选择识别算法”选择对应算法的单选框,程序便会自动执行对应的识别算法。选择不同的识别算法后,程序运行的界面如图13所示:



图13 程序运行界面
2.识别算法准确率分析:
为了了解算法哪个算法的检测准确率最高,在测试集对识别算法进行测试。测试集包含30张图片,其中蓝色牌照24张、黄色牌照4张以及绿色牌照2张。测试集中的牌照比例是根据CCPD数据集中各牌照比例进行设计的。测试结果如表1所示:
| 算法 | 准确率(%) |
| 传统方法检测车牌+SVM识别车牌字符 | 56.7% |
| YOLOv5方法检测车牌+SVM识别车牌字符 | 60% |
| YOLOv5方法检测车牌+CNN识别车牌字符 | 43.3% |
从实验结果可以看出,总体上看识别准确率并不高,但是观察识别错误中的数据,发现其中只是个别字符出现错误。其中YOLOv5对车牌的检测效果要略优于传统图像处理方法,如果YOLOv5算法训练数据集以及训练轮次增加,识别效果将会变得更好。SVM识别车牌字符效果看上去要比CNN识别车牌字符好,具体的原因是CNN训练轮次不足导致的,如果实验条件充足,增加训练轮次和数据集,那么CNN识别效果肯定是优于SVM的。总体上来说,我认为YOLOv5方法检测车牌+CNN识别车牌字符算法准确率是要优于其他算法的,但是资源消耗上要远远高于其他算法。这也是深度学习模型共有的缺陷了,太过于依赖训练轮次和训练数据集。
代码在:https://github.com/Dara-to-win/Plate-Recognition
欢迎Star一下!!!
参考文献:
[1]基于yolov5的车牌检测,https://github.com/xialuxi/yolov5-car-plate
[2]CCPD(中国城市停车数据集),https://github.com/detectRecog/CCPD
[3]端到端车牌识别项目,https://github.com/MrZhousf/license_plate_recognize
[4]车牌号识别python + opencv,https://blog.csdn.net/wzh191920/article/details/79589506
[5]车牌号识别https://github.com/wzh191920/License-Plate-Recognition
[6]CNN算法,http://t.zoukankan.com/lorenshuai724005-p-9520445.html
我收到这个错误:RuntimeError(自动加载常量Apps时检测到循环依赖当我使用多线程时。下面是我的代码。为什么会这样?我尝试多线程的原因是因为我正在编写一个HTML抓取应用程序。对Nokogiri::HTML(open())的调用是一个同步阻塞调用,需要1秒才能返回,我有100,000多个页面要访问,所以我试图运行多个线程来解决这个问题。有更好的方法吗?classToolsController0)app.website=array.join(',')putsapp.websiteelseapp.website="NONE"endapp.saveapps=Apps.order("
我有一个用户工厂。我希望默认情况下确认用户。但是鉴于unconfirmed特征,我不希望它们被确认。虽然我有一个基于实现细节而不是抽象的工作实现,但我想知道如何正确地做到这一点。factory:userdoafter(:create)do|user,evaluator|#unwantedimplementationdetailshereunlessFactoryGirl.factories[:user].defined_traits.map(&:name).include?(:unconfirmed)user.confirm!endendtrait:unconfirmeddoenden
华为OD机试题本篇题目:明明的随机数题目输入描述输出描述:示例1输入输出说明代码编写思路最近更新的博客华为od2023|什么是华为od,od薪资待遇,od机试题清单华为OD机试真题大全,用Python解华为机试题|机试宝典【华为OD机试】全流程解析+经验分享,题型分享,防作弊指南华为o
C#实现简易绘图工具一.引言实验目的:通过制作窗体应用程序(C#画图软件),熟悉基本的窗体设计过程以及控件设计,事件处理等,熟悉使用C#的winform窗体进行绘图的基本步骤,对于面向对象编程有更加深刻的体会.Tutorial任务设计一个具有基本功能的画图软件**·包括简单的新建文件,保存,重新绘图等功能**·实现一些基本图形的绘制,包括铅笔和基本形状等,学习橡皮工具的创建**·设计一个合理舒适的UI界面**注明:你可能需要先了解一些关于winform窗体应用程序绘图的基本知识,以及关于GDI+类和结构的知识二.实验环境Windows系统下的visualstudio2017C#窗体应用程序三.
MIMO技术的优缺点优点通过下面三个增益来总体概括:阵列增益。阵列增益是指由于接收机通过对接收信号的相干合并而活得的平均SNR的提高。在发射机不知道信道信息的情况下,MIMO系统可以获得的阵列增益与接收天线数成正比复用增益。在采用空间复用方案的MIMO系统中,可以获得复用增益,即信道容量成倍增加。信道容量的增加与min(Nt,Nr)成正比分集增益。在采用空间分集方案的MIMO系统中,可以获得分集增益,即可靠性性能的改善。分集增益用独立衰落支路数来描述,即分集指数。在使用了空时编码的MIMO系统中,由于接收天线或发射天线之间的间距较远,可认为它们各自的大尺度衰落是相互独立的,因此分布式MIMO
Transformers开始在视频识别领域的“猪突猛进”,各种改进和魔改层出不穷。由此作者将开启VideoTransformer系列的讲解,本篇主要介绍了FBAI团队的TimeSformer,这也是第一篇使用纯Transformer结构在视频识别上的文章。如果觉得有用,就请点赞、收藏、关注!paper:https://arxiv.org/abs/2102.05095code(offical):https://github.com/facebookresearch/TimeSformeraccept:ICML2021author:FacebookAI一、前言Transformers(VIT)在图
遍历文件夹我们通常是使用递归进行操作,这种方式比较简单,也比较容易理解。本文为大家介绍另一种不使用递归的方式,由于没有使用递归,只用到了循环和集合,所以效率更高一些!一、使用递归遍历文件夹整体思路1、使用File封装初始目录,2、打印这个目录3、获取这个目录下所有的子文件和子目录的数组。4、遍历这个数组,取出每个File对象4-1、如果File是否是一个文件,打印4-2、否则就是一个目录,递归调用代码实现publicclassSearchFile{publicstaticvoidmain(String[]args){//初始目录Filedir=newFile("d:/Dev");Datebeg
通常,数组被实现为内存块,集合被实现为HashMap,有序集合被实现为跳跃列表。在Ruby中也是如此吗?我正在尝试从性能和内存占用方面评估Ruby中不同容器的使用情况 最佳答案 数组是Ruby核心库的一部分。每个Ruby实现都有自己的数组实现。Ruby语言规范只规定了Ruby数组的行为,并没有规定任何特定的实现策略。它甚至没有指定任何会强制或至少建议特定实现策略的性能约束。然而,大多数Rubyist对数组的性能特征有一些期望,这会迫使不符合它们的实现变得默默无闻,因为实际上没有人会使用它:插入、前置或追加以及删除元素的最坏情况步骤复
在ruby中,你可以这样做:classThingpublicdeff1puts"f1"endprivatedeff2puts"f2"endpublicdeff3puts"f3"endprivatedeff4puts"f4"endend现在f1和f3是公共(public)的,f2和f4是私有(private)的。内部发生了什么,允许您调用一个类方法,然后更改方法定义?我怎样才能实现相同的功能(表面上是创建我自己的java之类的注释)例如...classThingfundeff1puts"hey"endnotfundeff2puts"hey"endendfun和notfun将更改以下函数定
我想知道我的代码是否在rspec下运行。这可能吗?原因是我正在加载一些错误记录器,这些记录器在测试期间会被故意错误(expect{x}.toraise_error)弄得乱七八糟。我查看了我的ENV变量,没有(明显的)测试环境变量的迹象。 最佳答案 在spec_helper.rb的开头添加:ENV['RACK_ENV']='test'现在您可以在代码中检查RACK_ENV是否经过测试。 关于ruby-检测由RSpec、Ruby运行的代码,我们在StackOverflow上找到一个类似的问题