并发性能测试的过程是一个负载测试和压力测试的过程,即逐渐增加负载,直到系统的瓶颈或者不能接收的性能点。在并发量较大时。单台压测机的配置(CPU和内存)可能无法支持,可以使用
Jmeter提供的分布式测试的功能。Master 和 Slave 最好统一jmeter版本避免报错异常。
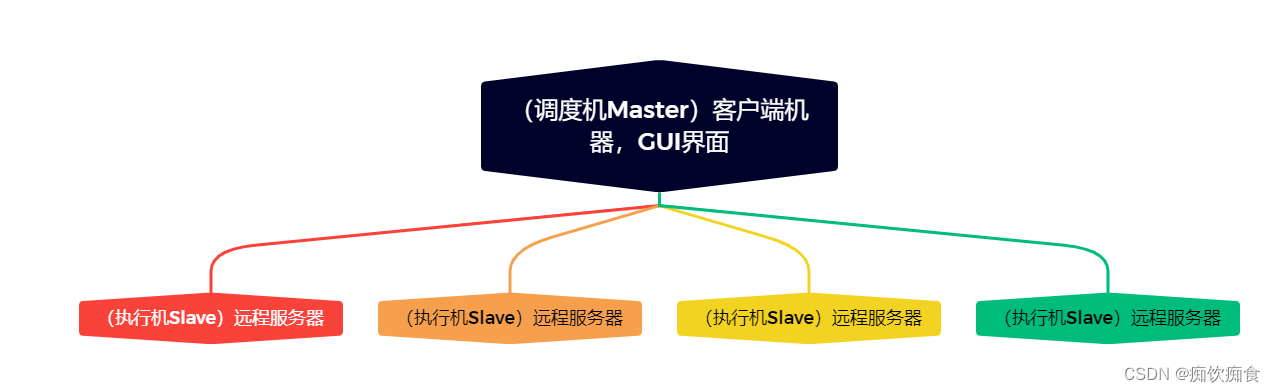
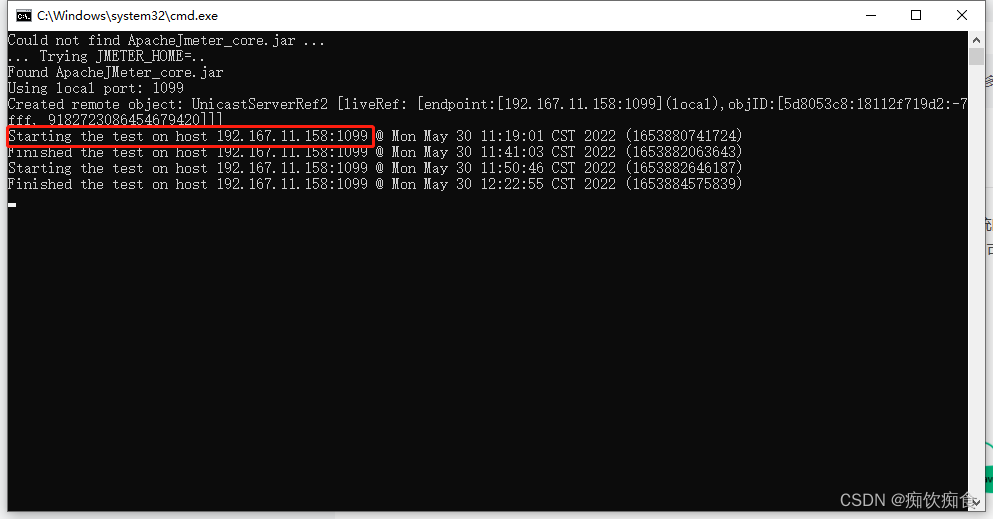
调度机执行脚本时,master会把脚本发送到每台slave上,slave 拿到脚本后就开始执行,slave执行时不需要启动GUI。会显示Starting the test on host
每台执行机设置, 修改Jmeter的bin目录下jmeter.properties文件,修改如下两个配置项
server_port=1099
server.rmi.localport=1099


点击保存后,启动bin目录下的:jmeter-server.bat
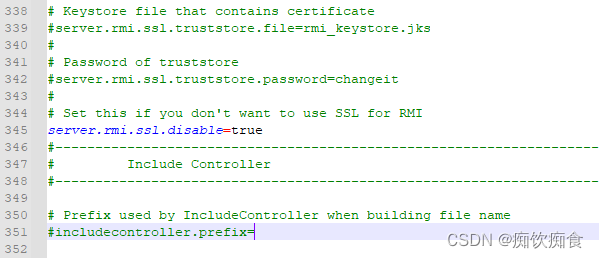
首次启动会报异常,修改Jmeter的bin目录下jmeter.properties文件
server.rmi.ssl.disable=true
在Master机器上修改bin目录下jmeter.properties文件,需要几台Slave就添加几个ip:port
remote_hosts= 192.167.11.52:1099, 192.168.110.129:1099
打开jmeter.bat,选好脚本及设置运行场景,选择远程全部启动,就可以进行分布式压测
如:脚本并发量30,则2台执行机就60并发量。
脚本测试结果:

这似乎非常适得其反,因为太多的gem会在window上破裂。我一直在处理很多mysql和ruby-mysqlgem问题(gem本身发生段错误,一个名为UnixSocket的类显然在Windows机器上不能正常工作,等等)。我只是在浪费时间吗?我应该转向不同的脚本语言吗? 最佳答案 我在Windows上使用Ruby的经验很少,但是当我开始使用Ruby时,我是在Windows上,我的总体印象是它不是Windows原生系统。因此,在主要使用Windows多年之后,开始使用Ruby促使我切换回原来的系统Unix,这次是Linux。Rub
我有一个涉及多台机器、消息队列和事务的问题。因此,例如用户点击网页,点击将消息发送到另一台机器,该机器将付款添加到用户的帐户。每秒可能有数千次点击。事务的所有方面都应该是容错的。我以前从未遇到过这样的事情,但一些阅读表明这是一个众所周知的问题。所以我的问题。我假设安全的方法是使用两阶段提交,但协议(protocol)是阻塞的,所以我不会获得所需的性能,我是否正确?我通常写Ruby,但似乎Redis之类的数据库和Rescue、RabbitMQ等消息队列系统对我的帮助不大——即使我实现某种两阶段提交,如果Redis崩溃,数据也会丢失,因为它本质上只是内存。所有这些让我开始关注erlang和
require"socket"server="irc.rizon.net"port="6667"nick="RubyIRCBot"channel="#0x40"s=TCPSocket.open(server,port)s.print("USERTesting",0)s.print("NICK#{nick}",0)s.print("JOIN#{channel}",0)这个IRC机器人没有连接到IRC服务器,我做错了什么? 最佳答案 失败并显示此消息::irc.shakeababy.net461*USER:Notenoughparame
文章目录1、自相关函数ACF2、偏自相关函数PACF3、ARIMA(p,d,q)的阶数判断4、代码实现1、引入所需依赖2、数据读取与处理3、一阶差分与绘图4、ACF5、PACF1、自相关函数ACF自相关函数反映了同一序列在不同时序的取值之间的相关性。公式:ACF(k)=ρk=Cov(yt,yt−k)Var(yt)ACF(k)=\rho_{k}=\frac{Cov(y_{t},y_{t-k})}{Var(y_{t})}ACF(k)=ρk=Var(yt)Cov(yt,yt−k)其中分子用于求协方差矩阵,分母用于计算样本方差。求出的ACF值为[-1,1]。但对于一个平稳的AR模型,求出其滞
目录0专栏介绍1平面2R机器人概述2运动学建模2.1正运动学模型2.2逆运动学模型2.3机器人运动学仿真3动力学建模3.1计算动能3.2势能计算与动力学方程3.3动力学仿真0专栏介绍?附C++/Python/Matlab全套代码?课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索、采样法、智能算法等);局部规划(DWA、APF等);曲线优化(贝塞尔曲线、B样条曲线等)。?详情:图解自动驾驶中的运动规划(MotionPlanning),附几十种规划算法1平面2R机器人概述如图1所示为本文的研究本体——平面2R机器人。对参数进行如下定义:机器人广义坐标
2022年底,OpenAI的预训练模型ChatGPT给人工智能领域的爱好者和研究人员留下了深刻的印象和启发,他展现的惊人能力将人工智能的研究和应用热度推向高潮,网上也充斥着和ChatGPT的各种聊天,他可以作诗、写小说、写代码、讨论疫情问题等。下面就是一些他的神回复:人命关天的坑: 写歌,留给词作者的机会不多了。。。 回答人类怎么样面对人工智能: 什么是ChatGPT?借用网上的一段介绍,ChatGPT是由人工智能研究实验室OpenAI在2022年11月30日发布的全新聊天机器人模型,一款人工智能技术驱动的自然语言处理工具。它能够通过学习和理解人类的语言来进行对话,还能根据聊天的上下文进行互动
我想使用ruby-prof和JMeter分析Rails应用程序。我对分析特定Controller/操作/或模型方法的建议方法不感兴趣,我想分析完整堆栈,从上到下。所以我运行这样的东西:RAILS_ENV=productionruby-prof-fprof.outscript/server>/dev/null然后我在上面运行我的JMeter测试计划。然而,问题是使用CTRL+C或SIGKILL中断它也会在ruby-prof可以写入任何输出之前杀死它。如何在不中断ruby-prof的情况下停止mongrel服务器? 最佳答案
我正在为在AmazonEC2实例上运行的应用程序设计一个AutoScaling系统。应用程序从SQS读取消息并对其进行处理。AutoScaling系统将监控两件事:SQS中的消息数量,所有EC2机器上运行的进程总数。例如,如果SQS中的消息数量超过3000,我希望系统自动缩放,创建一个新的EC2实例,在其上部署代码,当消息数量低于2000时,我希望系统终止EC2实例.我正在用Ruby和Capistrano做这件事。我的问题是:我无法找到一种方法来确定在所有EC2机器上运行的进程数并将该数字保存在变量中。你能帮帮我吗? 最佳答案 您可
我有一个启动DRb服务的脚本,然后生成处理程序对象并通过DRb.thread.join等待。我希望脚本一直运行直到被明确杀死,所以我添加了trap"INT"doDRb.stop_serviceend在Ruby1.8下成功停止DRb服务并退出,但在1.9下似乎死锁(在OSX10.6.7上)。对该进程进行采样显示在semaphore_wait_signal_trap中有几个线程在旋转。我假设我在调用stop_service时做错了什么,但我不确定是什么。谁能给我任何关于如何正确处理它的指示? 最佳答案 好的,我想我已经找到了解决方案。如
我正在构建一个点击元素的Selenium/Ruby网络机器人。问题是,有时在机器人决定找不到元素之前没有足够的时间加载页面。让Selenium在执行操作之前等待的Ruby方法是什么?我更喜欢显式等待,但我也接受隐式等待。我尝试使用wait.until方法:require"selenium-webdriver"require"nokogiri"driver=Selenium::WebDriver.for:chromewait=Selenium::WebDriver::Wait.new(:timeout=>15)driver.navigate.to"http://google.com"dr