
随着现代信息技术与软硬件技术的快速发展,嵌入式系统的功能日益强大,嵌入式设备和软件应用领域越来越宽泛。近年来,嵌入式软件代码量呈爆炸式增长,对测试的要求越来越高,尤其是涉及防务、航空、汽车等安全关键领域。
更加全面、系统的测试方法是必不可少的。更好的测试方法可以:
检验嵌入式软件是否满足需求;
检验预期结果与实际结果之间的差别;
保障装备质量。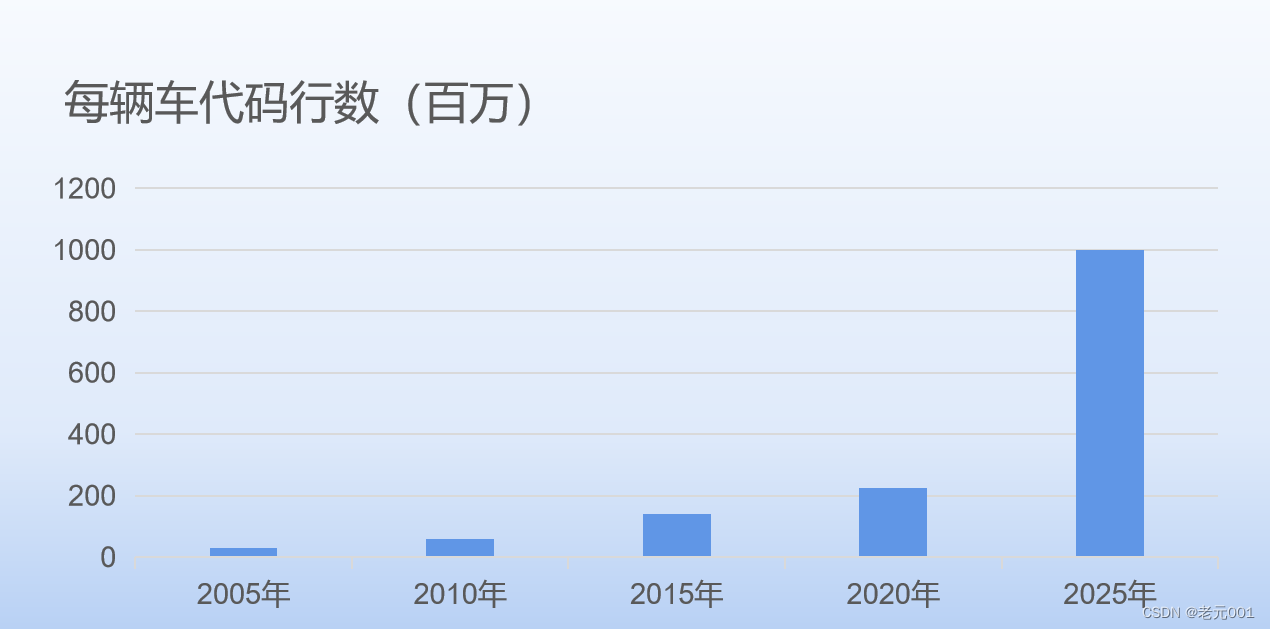
嵌入式软件通常需要在特定的仿真测试环境中进行测试。仿真测试环境主要分为全实物仿真(目标机仿真)环境、半实物仿真(硬件在环仿真)环境、全数字仿真环境。
● 全实物仿真环境:建立真实的嵌入式环境并与外围物理设备相连接,形成闭环测试。该环境下测试所得结果的真实性最强,但是构造和使用的成本最为昂贵,可控行也比较差,难以进行数据收集和故障重现。一旦出现故障,很有可能会损害外部设备甚至整个物理环境,造成巨大的财产、人员损失。
● 半实物仿真环境:在目标机上测试软件,用仿真器模拟外部环境,以提供激励信息和接收反馈信息。该环境下测试接近实装测试,可靠性强。具有较好地收集数据、更容易地进行故障重现、可控性强且能实现自动化测试,风险小,收益大。
● 全数字仿真环境:用软件来仿真嵌入式环境和外围物理设备,也称为虚拟仿真,使用的都是虚拟的东西,例如:虚拟的控制器和虚拟的被测对象。这种仿真测试的可信度主要取决于模型的准确度,总体来说可信度低,应用场景少,与实际装备运行区别大。
对比三种测试环境,可以看出半实物仿真同其它类型的仿真方法相比具有经济地实现更高真实度的可能性。从系统的观点来看,半实物仿真允许在系统中接入部分实物,意味着可以把部分实物放在系统中进行考察,从而使部件能在满足系统整体性能指标的环境中得到检验,因此半实物仿真是提高系统设计的可靠性和研制质量的必要手段。
02半实物仿真测试的先进性和特点

半实物仿真,又称为硬件在回路中的仿真(Hardware in the Loop Simulation),是指在仿真实验系统的仿真回路中接入部分实物的实时仿真。
半实物仿真技术自20世纪60年代问世直到目前美国研制航天飞机,始终盛行不衰。美国大多数国防项目承包商都有一个或多个半实物仿真实验室,这些实验室代表了当前世界先进水平。
其先进性体现在:
(1) 有高速高精度的仿真机;
(2) 有先进完备的环境模拟设备。国内半实物仿真技术在导弹制导、火箭控制、卫星姿态控制等应用研究方面也达到了较高水平。
半实物仿真的特点是:
(1) 在回路中接入实物,必须实时运行,即仿真模型的时间标尺和自然时间标尺相同。
(2) 需要解决控制器与仿真计算机之间的接口问题。
(3) 半实物仿真的实验结果比数字仿真更接近实际。
03半实物仿真系统的基本组成和原理
半实物仿真系统是一种硬件在环实时技术,把实物利用计算机接口嵌入到软件环境中去,并要求系统的软件和硬件都要实时运行,从而模拟整个系统的运行状态。
● 仿真计算机:仿真计算机是实时仿真系统的核心部分,它运行实体对象和仿真环境的数学模型和程序。一般来说,采用层次化、模块化的建模法,将模块化程序划分为不同的速率块,在仿真计算机中按速率块实时调度运行。对于复杂的大型仿真系统,可用多台计算机联网实时运行。
● 物理效应设备:物理效应设备的作用是模拟复现真实世界的物理环境,形成仿真环境或称为虚拟环境。物理效应设备实现的技术途径多种多样,方案之一是采用伺服控制回路,通过伺服控制回路控制形成相应的物理量,方案之二是在已储存好的数据库中搜索相应的数据,转化为相应的物理量。
● 接口设备:仿真计算机输出的驱动信号经接口变换后驱动相应的物理效应设备。接口设备同时将操作人员或实物系统的控制输入信号馈入仿真计算机。
04半实物仿真开发环境ETest

ETest半实物仿真测试开发环境,提供图形化的测试用例开发环境,自动生成测试脚本;测试结果数据可以在线监控,同时生成测试结果信息,并自动生成符合要求的测试报告;ETest为开放性平台,提供C/C++, Python, Lua, Java等API,图形化监控软件界面可以根据用户需求定制。
ETest已经在航空、航天、兵器、船舶等多个军工领域科研单位数以百计的项目中中得到过广泛使用和验证,性能稳定可靠。
ETest 通用性强,针对不同的被测对象,无需从零开发测试工具,可以利用ETest快速搭建各类专业化仿真测试工装。与传统模式开发对比,在时间、人力等成本上降低80%以上,扩展灵活,覆盖充分。
ETest支持的操作系统除了中标麒麟、银河麒麟、统信软件外,还支持windows linux Mac以及实时的RT linux等。
在VMware16.2.4安装Ubuntu一、安装VMware1.打开VMwareWorkstationPro官网,点击即可进入。2.进入后向下滑动找到Workstation16ProforWindows,点击立即下载。3.下载完成,文件大小615MB,如下图:4.鼠标右击,以管理员身份运行。5.点击下一步6.勾选条款,点击下一步7.先勾选,再点击下一步8.去掉勾选,点击下一步9.点击下一步10.点击安装11.点击许可证12.在百度上搜索VM16许可证,复制填入,然后点击输入即可,亲测有效。13.点击完成14.重启系统,点击是15.双击VMwareWorkstationPro图标,进入虚拟机主
需求:要创建虚拟机,就需要给他提供一个虚拟的磁盘,我们就在/opt目录下创建一个10G大小的raw格式的虚拟磁盘CentOS-7-x86_64.raw命令格式:qemu-imgcreate-f磁盘格式磁盘名称磁盘大小qemu-imgcreate-f磁盘格式-o?1.创建磁盘qemu-imgcreate-fraw/opt/CentOS-7-x86_64.raw10G执行效果#ls/opt/CentOS-7-x86_64.raw2.安装虚拟机使用virt-install命令,基于我们提供的系统镜像和虚拟磁盘来创建一个虚拟机,另外在创建虚拟机之前,提前打开vnc客户端,在创建虚拟机的时候,通过vnc
一段时间以来,我一直在使用open_uri下拉ftp路径作为数据源,但突然发现我几乎连续不断地收到“530抱歉,允许的最大客户端数(95)已经连接。”我不确定我的代码是否有问题,或者是否是其他人在访问服务器,不幸的是,我无法真正确定谁有问题。本质上,我正在读取FTPURI:defself.read_uri(uri)beginuri=open(uri).readuri=="Error"?nil:urirescueOpenURI::HTTPErrornilendend我猜我需要在这里添加一些额外的错误处理代码...我想确保我采取一切预防措施来关闭所有连接,这样我的连接就不是问题所在,但是我
目录0专栏介绍1平面2R机器人概述2运动学建模2.1正运动学模型2.2逆运动学模型2.3机器人运动学仿真3动力学建模3.1计算动能3.2势能计算与动力学方程3.3动力学仿真0专栏介绍?附C++/Python/Matlab全套代码?课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索、采样法、智能算法等);局部规划(DWA、APF等);曲线优化(贝塞尔曲线、B样条曲线等)。?详情:图解自动驾驶中的运动规划(MotionPlanning),附几十种规划算法1平面2R机器人概述如图1所示为本文的研究本体——平面2R机器人。对参数进行如下定义:机器人广义坐标
一、机器人介绍 此处是基于MATLABRVC工具箱,对ABB-IRB-1200型号的微型机械臂进行正逆向运动学分析,并利Simulink工具实现对机械臂进行具有动力学参数的末端轨迹规划仿真,最后根据机械模型设计Simulink-Adams联合仿真。 图1.ABBIRB 1200尺寸参数示意图ABBIRB 1200提供的两种型号广泛适用于各作业,且两者间零部件通用,两种型号的工作范围分别为700 mm 和 900 mm,大有效负载分别为 7 kg 和5 kg。 IRB 1200 能够在狭小空间内能发挥其工作范围与性能优势,具有全新的设计、小型化的体积、高效的性能、易于集成、便捷的接
我这个模型:classBunny每当我提交一个表单来创建这个模型时,我都会收到以下错误:#的未定义方法“number_before_type_cast” 最佳答案 我通过将此方法添加到我的Bunny模型中解决了这个问题:defnumber_before_type_castnumberend我不喜欢它,但我想在有人发布更好的解决方案之前它会起作用。 关于ruby-on-rails-Rails验证虚拟属性,我们在StackOverflow上找到一个类似的问题: h
【适用平台】私有云 说明:完成私有云部分是需要两台虚拟机的,分别为controller、compute两个节点,但我们只需配置一台,然后克隆就方便多啦!需要用到的映射文件:关于vm的安装我就不介绍的,毕竟挺简单的,下面让我们看看基于私有云模块中,虚拟机的搭建吧。1、创建新的虚拟机,这里一般我会选择自定义,毕竟后面的配置都要根据私有云相关来进行搭建,会比较复杂。(如果是基础的可以选择典型,典型的满足一般虚拟机的配置) 2、选择稍后安装操作系统会比较方便后续的选择,这里你也可以自己选择自己的映像文件(但不建议) 3、我们是基于Linux下操作的,所以选择Linux客户机操作系统,版本选择自己
我正在寻找一种可靠的方式来部署Rack应用程序(在本例中为Sinatra应用程序)。请求将花费一些时间(0.25-0.5秒等待代理HTTP请求)并且可能会有相当大的流量。我应该使用传统的mongrel集群设置吗?使用HAProxy作为负载均衡器?恩金克斯?架子?您使用过哪些解决方案,有哪些优势? 最佳答案 Nginx/unicornFTW!前面的Nginx提供静态文件和unicorn处理Sinatra应用程序。优点:性能、使用unixsocks的良好负载平衡以及无需停机即可部署/升级(您可以在不停机的情况下升级Ruby/Nginx/
VMware虚拟机与本地主机进行磁盘共享前提虚拟机版本为Windows10(专业版,不是可能有问题)本地主机为家庭版或学生版(此版本会有问题,但有替代方式)最好是专业版VMware操作1.关闭防火墙,全部关闭。2.打开电脑属性3.点击共享-》高级共享-》权限4.如果没有everyone,就添加权限选择完全控制,然后应用确定。5.打开cmd输入lusrmgr.msc(只有专业版可以打开)如果不是专业版,可以跳过这一步。点击用户-》administrator密码要复杂密码,否则不行。推荐admaiN@1234类型的密码。设置完密码,点击属性,将禁用解开。6.如果虚拟机的windows不是专业版,可
🚀🚀🚀🚀🚀🚀🚀🚀🚀🚀虚拟机上进行java项目部署,自己的一点总结,一起学习,一起进步,一起成长!🛸🛸🛸🛸🛸🛸🛸🛸🛸🛸目录文章目录虚拟机上进行java项目部署1.JDK安装2.TOMCAT安装3.DOCKER1、YUM安装2、docker部署java4、最后 【yzh2022.9】1.JDK安装1、我们安装VM的时候,使用命令java-version查看 java-version这里显示JDK的信息是openjdkversion"1.8.0_262",我们会发现这个JDK是VM自带的当然你也可以通过命令rpm-qa|grepjava来查看相关的java信息 rpm-qa|grepjava【如果不