在一般的图像数据的采集场景中,得到的多是二维图像,所以大多数深度学习网络的雏形都是基于二维图像展开的工作。
但是,在某些场景下,比如医学影像CT数据,监控场景连续拍摄的视频和自动驾驶使用到的激光点云等等,多是连续的、多层的数据。
此时,层内的信息,和层与层之间的层间深度信息,也是一个重要的特征信息。所以,实现三维的目标分类任务,也是必不可少的。想想很复杂,但是动手实操了,才能理解其中的内容。
本文就对三维图像分类任务展开介绍,主要是自己的实战记录过程。包括:
下面一点点的进行详述。
三维网络我们不熟悉,就先从构建二维网络开始,然后推到三维网络里面去。这样能帮助我们更快的理解。下面就以LeNet为例,展开实验
在学习神经网络的时候,LeNet是一个比较早期的网络,并且结构也是比较的简单,很方便我们理解的。这里我就以LeNet为例,构建一个卷积是3*3、stride=2的改版LeNet2D模型,如下所示:
import torch
import torch.nn as nn
import torch.nn.functional as F
from torch.autograd import Variable
from torchsummary import summary
class LeNet2D(nn.Module):
def __init__(self, num_classes=2, input_channel=3, init_weights=False):
super(LeNet2D, self).__init__()
self.conv1 = nn.Conv2d(input_channel, 16, kernel_size=3, stride=2, padding=1)
self.pool1 = nn.MaxPool2d(2, 2)
self.conv2 = nn.Conv2d(16, 32, kernel_size=3, stride=2, padding=1)
self.pool2 = nn.MaxPool2d(2, 2)
self.fc1 = nn.Linear(32*4*4, 120)
self.fc2 = nn.Linear(120, 84)
self.fc3 = nn.Linear(84, num_classes)
if init_weights:
self._initialize_weights()
def forward(self, x): # 1, 64, 64
x = F.relu(self.conv1(x)) # output 16, 32, 32
x = self.pool1(x) # output 16, 16, 16
x = F.relu(self.conv2(x)) # output 32, 8, 8
x = self.pool2(x) # output 32, 4, 4
x = x.view(x.size(0), -1) # outpu 32*4*4, 1
x = F.relu(self.fc1(x)) # output(120)
x = F.relu(self.fc2(x)) # output(84)
x = self.fc3(x) # output(10)
return x
def _initialize_weights(self):
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.xavier_uniform_(m.weight)
if m.bias is not None:
nn.init.constant_(m.bias, 0)
elif isinstance(m, nn.Linear):
nn.init.xavier_uniform_(m.weight)
nn.init.constant_(m.bias, 0)
def main_2d():
model = LeNet2D(num_classes=2, input_channel=1, init_weights=True)
model = nn.DataParallel(model, device_ids=None)
print(model)
summary(model, input_size=(1, 64, 64), batch_size=-1, device='cpu')
input_var = Variable(torch.randn(16, 1, 64, 64)) # b,c,h,w
output = model(input_var)
print(output.shape)
上述构建模型部分是比较简单的,相信你已经看明白了。对模型进行测试,看看是否满足我们的预期。其中:
1*64*64(b,c,h,w)summary打印的模型如下:
----------------------------------------------------------------
Layer (type) Output Shape Param #
================================================================
Conv2d-1 [-1, 16, 32, 32] 160
MaxPool2d-2 [-1, 16, 16, 16] 0
Conv2d-3 [-1, 32, 8, 8] 4,640
MaxPool2d-4 [-1, 32, 4, 4] 0
Linear-5 [-1, 120] 61,560
Linear-6 [-1, 84] 10,164
Linear-7 [-1, 2] 170
LeNet2D-8 [-1, 2] 0
================================================================
Total params: 76,694
Trainable params: 76,694
Non-trainable params: 0
----------------------------------------------------------------
Input size (MB): 0.02
Forward/backward pass size (MB): 0.18
Params size (MB): 0.29
Estimated Total Size (MB): 0.49
----------------------------------------------------------------
测试输入数组为(16, 1, 64, 64)时,输出的大小是torch.Size([16, 2]),16是批次大小,2是预设的输出类别,符合我们的预测。
在已经构造好的LeNet2D模型的基础上,改造成我们需要的LeNet3D模型,直接替换两处:
也就是将卷积核和池化核的尺寸都变动以下,增加一个深度信息。构建的模型如下:
class LeNet3D(nn.Module):
def __init__(self, num_classes=2):
super(LeNet3D, self).__init__()
self.conv1 = nn.Conv3d(1, 16, kernel_size=3, stride=2, padding=1)
self.pool1 = nn.MaxPool3d(2, 2)
self.conv2 = nn.Conv3d(16, 32, kernel_size=3, stride=2, padding=1)
self.pool2 = nn.MaxPool3d(2, 2)
self.fc1 = nn.Linear(32*2*4*4, 120)
self.fc2 = nn.Linear(120, 84)
self.fc3 = nn.Linear(84, num_classes)
def forward(self, x): # c,z, h, w c, z, h, w
x = F.relu(self.conv1(x)) # input(1,32,64,64) -- kernel_size=3, stride=2 -- (16,16,32,32)
x = self.pool1(x) # output (16,8,16,16)
x = F.relu(self.conv2(x)) # output (32, 4, 8, 8)
x = self.pool2(x) # output (32, 2, 4, 4)
x = x.view(x.size(0), -1) # output (32*2*4*4, 1)
x = F.relu(self.fc1(x)) # output(120)
x = F.relu(self.fc2(x)) # output(84)
x = self.fc3(x) # output(10)
return x
def main_3d():
model = LeNet3D(num_classes = 2)
model = nn.DataParallel(model, device_ids=None)
print(model)
summary(model, input_size=(1, 32, 64, 64), batch_size=-1, device='cpu')
#
input_var = Variable(torch.randn(16, 1, 32, 64, 64)) # b,c,z,h,w
output = model(input_var)
print(output.shape)
依旧对模型进行测试,看看是否满足我们的预期(养成一步一测试的习惯)。其中:
1*32*64*64(b,c,z,h,w)3维输入数据,与2维输入数据,多了一个Z周的维度信息。所以,再后面构建数据时候,也要跟此处测试的数据格式一致。
打印的模型如下:
DataParallel(
(module): LeNet3D(
(conv1): Conv3d(1, 16, kernel_size=(3, 3, 3), stride=(2, 2, 2), padding=(1, 1, 1))
(pool1): MaxPool3d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(conv2): Conv3d(16, 32, kernel_size=(3, 3, 3), stride=(2, 2, 2), padding=(1, 1, 1))
(pool2): MaxPool3d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(fc1): Linear(in_features=1024, out_features=120, bias=True)
(fc2): Linear(in_features=120, out_features=84, bias=True)
(fc3): Linear(in_features=84, out_features=2, bias=True)
)
)
PS;这里加了并行化,可以把并行化的代码去除掉,进行打印,更加简洁。
summary打印的模型如下:
----------------------------------------------------------------
Layer (type) Output Shape Param #
================================================================
Conv3d-1 [-1, 16, 16, 32, 32] 448
MaxPool3d-2 [-1, 16, 8, 16, 16] 0
Conv3d-3 [-1, 32, 4, 8, 8] 13,856
MaxPool3d-4 [-1, 32, 2, 4, 4] 0
Linear-5 [-1, 120] 123,000
Linear-6 [-1, 84] 10,164
Linear-7 [-1, 2] 170
LeNet3D-8 [-1, 2] 0
================================================================
Total params: 147,638
Trainable params: 147,638
Non-trainable params: 0
----------------------------------------------------------------
Input size (MB): 0.50
Forward/backward pass size (MB): 2.32
Params size (MB): 0.56
Estimated Total Size (MB): 3.39
----------------------------------------------------------------
测试输入数组为(16, 1, 32, 64, 64)时,输出的大小是torch.Size([16, 2]),符合我们的预测。
注意一点:网络模型对于的图像大小的输入是有要求的,上述代码中构建的模型,智适用于输入大小为(1, 32, 64, 64)的,这是因为在全连接时候,需要将前一层卷积后的输出进行拉直操作。
此时,这个拉直后的大小,是和输入图像的大小,有直接关系的。上面我对全连接部分对尺寸怎么计算得到的,进行了备注,你也可以修改为自己希望输入的尺寸,只要对应修改全连接输入的部分,即可。
如果,你需要对模型进行参数初始化,可以添加模型初始化部分,如下所示:
class LeNet3D(nn.Module):
def __init__(self, num_classes=2, init_weights=False):
super(LeNet3D, self).__init__()
if init_weights:
self._initialize_weights()
def _initialize_weights(self):
for m in self.modules():
if isinstance(m, nn.Conv3d):
n = m.kernel_size[0] * m.kernel_size[1] * m.kernel_size[2] * m.out_channels
m.weight.data.normal_(0, math.sqrt(2. / n))
if m.bias is not None:
m.bias.data.zero_()
elif isinstance(m, nn.BatchNorm3d):
m.weight.data.fill_(1)
m.bias.data.zero_()
elif isinstance(m, nn.Linear):
n = m.weight.size(1)
m.weight.data.normal_(0, 0.01)
m.bias.data.zero_()
模型初始化方式挺多的,全0初始化、随机初始化、高斯分布初始化、预训练模型初始化等等。如果没有主动定义初始化
更多summary的信息,可以参考这里:torch.summary打印出神经网络的形状和参数大小
LeNet模型从2维到3维的构建过程,是比较简单的,通过尝试输入数据进行测试网络数据流,也是满足预期的。
其中,改变输入图像的宽高大小,对于卷积和池化的输入大小,是不需要做适应的。而全连接的输入,需要预先固定。所以,代码部分给出了数据流大小的计算过程,方便改写。
当然,这里只是简单学习了LeNet模型从2维变3维,且进行测试的过程。网络上前辈已经将目前常用的网络模型,基本都改好了3维版本的,所以,如果需要了,可以直接使用。
这里提供一个GitHub,包括了'c3d', 'squeezenet', 'mobilenet', 'resnext', 'resnet', 'shufflenet', 'mobilenetv2', 'shufflenetv2'的3维模型。链接:Efficient-3DCNNs
由前面设计网络部分的模拟输入数据的结构,我们可以知道,接下来创建数据时候,也需要是1, 32, 64, 64的数据形式,表示32个1*64*64的图像,堆叠到了一起的一个数组。
这本篇的数据预处理中,我遵循如下的步骤:
[32, 1, 64, 64]的.nii数组文件itk.imread读取进来的,就是一个三维的结构数组one-hot形式你也可以将保存nii数组文件这块内容,放到GetLoader出进行处理,也是可以的,就是代码不那么的简洁。
至此,一个简单的三维模型数据块准备完毕,代码如下:
import torch
from torch.utils.data import Dataset
from torch.utils import data as torch_data
import itk
import os
class GetLoader(Dataset):
def __init__(self, data_root):
super().__init__()
self.data_root = data_root
self.list_path_data = os.listdir(data_root)
def __getitem__(self, index):
name_i = self.list_path_data[index]
# print(name_i)
data = itk.array_from_image(itk.imread(os.path.join(self.data_root, name_i)))
# print(data.shape)
data = (data - data.min()) / (data.max() - data.min())
label_cls_str = name_i.split('_')[-1].split('.nii')[0]
labels = [1, 0] if label_cls_str == 'malignant' else [0, 1]
return torch.tensor(data[None, :]).float(), torch.tensor(labels).float()
def __len__(self):
return len(self.list_path_data)
if __name__=='__main__':
data_root = r"./database/val"
dataNII = GetLoader(data_root)
print(len(dataNII))
valid_loader = torch_data.DataLoader(dataNII, batch_size=2, shuffle=False, num_workers=4,
pin_memory=False)
print(len(valid_loader))
for i in range(len(dataNII)):
image2d, label2d = dataNII[i]
print('image size ......')
print(image2d.shape) # torch.Size([1, 32, 1, 64, 64])
print('label size ......')
print(label2d.shape) # torch.Size([2])
这么是一个比较简单的版本。有基础版本,那就会有升级版本。后面我们还可以改变输入数据形式,比如图像数据是3通道的,增加数据增强方式等等。这部分内容,我们放到增强篇进行详述。
这里,我们现有基础版本上,查看下数据构建出来的样子,代码如下:
import matplotlib.pyplot as plt
if __name__=='__main__':
data_root = r"./data-channel_1/lidc/test"
dataNII = GetLoader(data_root)
print(len(dataNII))
valid_loader = torch_data.DataLoader(dataNII, batch_size=2, shuffle=False, num_workers=4,
pin_memory=False)
print(len(valid_loader))
for i in range(len(dataNII)):
image2d, label2d = dataNII[i]
print('image size ......')
print(image2d.shape) # (1, 32, 64, 64)
print('label size ......')
print(label2d.shape) # (2)
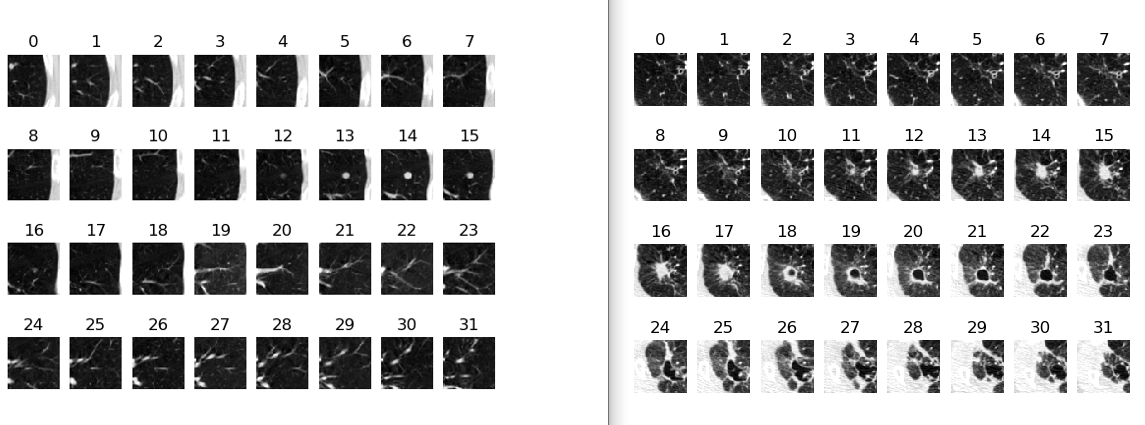
for j in range(image2d.shape[1]):
oneImg = image2d[0, j, :, :]
print(oneImg.shape)
plt.subplot(4, 8, j + 1)
plt.title(j)
plt.imshow(oneImg, cmap='gray')
plt.axis('off')
plt.show()
显示的图片序列信息如下,一个3维的图像是32张,每一张又是64*64的大小,铺开显示,就是下面这样:
显示部分参考链接:pytorch 带batch的tensor类型图像怎么显示?
pytorch中,最为简答和最流程化的部分,就数训练了。主要遵循以下一个结构:
上述精简版代码结构如下,之后我们在这个结构里面,进行填空就行:
def validation(valid_loader, path_ckpt):
return loss_avg, acc_sum
def train():
MAX_EPOCH = 70
ITR_PER_CKPT_VAL = 1
# 获取数据
train_data_retriever = GetLoader(data_train)
valid_data_retriever = GetLoader(data_val)
train_loader = torch_data.DataLoader()
valid_loader = torch_data.DataLoader()
# 获取模型
model = LeNet()
model.train()
model.to(device)
# 定义优化器
optimizer = torch.optim.SGD()
# 循环epoch
for i_epoch in range(1, MAX_EPOCH + 1):
loss_sum = 0
N = 0
# 循环一个epoch的batch
for step, (data, label) in enumerate(train_loader):
img = data.to(device)
targets = label.to(device)
outputs = model(img).squeeze(1)
# 定义损失函数
loss = F.cross_entropy(outputs, torch.max(targets, 1)[1]).to(device)
loss_sum += loss.detach().item()
optimizer.zero_grad()
loss.backward()
optimizer.step()
loss_avg = loss_sum / len(train_loader)
print("[Epoch " + str(i_epoch) + " | " + "train loss = " + ("%.7f" % loss_avg) + "]")
# 保存模型
path_ckpt = r"./checkpoints/" + str(i_epoch) + ".pth.tar"
torch.save({"epoch": i_epoch, "model_state_dict": model.state_dict(),
"optimizer_state_dict": optimizer.state_dict()}, path_ckpt)
# 阶段性评估
loss_val, acc_sum = validation(valid_loader, path_ckpt)
accuracy = acc_sum * 100 / len(valid_data_retriever)
print("[Epoch " + str(i_epoch) + " | " + "val loss = " + ("%.7f" % loss_val) + " accuracy = " + ("%.3f" % accuracy) + "%]")
if __name__=='__main__':
train()
如果你以前也做过pytorch的分类任务,那么你可以直接拿出来,在上面改就可以了。本文使用到的定义如下列表:
SGDcross_entropy完整训练和验证代码如下:
import pandas as pd
import torch
from torch.utils import data as torch_data
from torch.nn import functional as torch_functional
import torch.nn.functional as F
from tensorboardX import SummaryWriter
from Dataset import GetLoader
from models.LeNet import LeNet3D
os.environ["CUDA_VISIBLE_DEVICES"] = "0"
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
def validation(valid_loader, path_ckpt):
model = LeNet3D()
model_ckpt = torch.load(path_ckpt)
model.load_state_dict(model_ckpt['model_state_dict'])
# model = torch.nn.DataParallel(model).to(device)
model.eval()
model.to(device)
loss_sum = 0
acc_sum = 0
for step, (data, label) in enumerate(valid_loader):
img = data.to(device)
# print(img.shape)
targets = label.to(device)
outputs = model(img).squeeze(1)
loss = F.cross_entropy(outputs, torch.max(targets, 1)[1]).to(device)
loss_sum += loss.detach().item()
prediction = torch.max(outputs, 1)[1]
pred_y = prediction.data.cpu().numpy()
target = torch.max(targets, 1)[1]
target_y = target.data.cpu().numpy()
acc_sum += sum((pred_y-target_y)==0)
loss_avg = loss_sum / len(valid_loader)
return loss_avg, acc_sum
def train():
MAX_EPOCH = 70
ITR_PER_CKPT_VAL = 1
data_train = './database/train'
data_val = './database/val'
train_data_retriever = GetLoader(data_train)
valid_data_retriever = GetLoader(data_val)
train_loader = torch_data.DataLoader(train_data_retriever, batch_size=8, shuffle=True, num_workers=4, pin_memory=False, worker_init_fn=_init_fn)
valid_loader = torch_data.DataLoader(valid_data_retriever, batch_size=1, shuffle=False, num_workers=4, pin_memory=False, worker_init_fn=_init_fn)
model = LeNet3D()
# model = torch.nn.DataParallel(model).to(device)
model.train()
model.to(device)
optimizer = torch.optim.SGD(model.parameters(), lr=0.001, momentum=0.9)
best_valid_score = 0
writer = SummaryWriter(comment='Linear')
for i_epoch in range(1, MAX_EPOCH + 1):
loss_sum = 0
N = 0
for step, (data, label) in enumerate(train_loader):
img = data.to(device)
# print(img.shape)
targets = label.to(device)
outputs = model(img).squeeze(1)
loss = F.cross_entropy(outputs, torch.max(targets, 1)[1]).to(device)
loss_sum += loss.detach().item()
# print('run ', step, loss_sum)
optimizer.zero_grad()
loss.backward()
optimizer.step()
loss_avg = loss_sum / len(train_loader)
print("[Epoch " + str(i_epoch) + " | " + "train loss = " + ("%.7f" % loss_avg) + "]")
writer.add_scalar('scalar/train_loss', loss_avg, i_epoch)
if i_epoch % ITR_PER_CKPT_VAL == 0:
# Saving checkpoint.
path_ckpt = r"./checkpoints/" + str(i_epoch) + ".pth.tar"
torch.save({"epoch": i_epoch, "model_state_dict": model.state_dict(),
"optimizer_state_dict": optimizer.state_dict()}, path_ckpt)
loss_val, acc_sum = validation(valid_loader, path_ckpt)
accuracy = acc_sum * 100 / len(valid_data_retriever)
print("[Epoch " + str(i_epoch) + " | " + "val loss = " + ("%.7f" % loss_val) + " accuracy = " + ("%.3f" % accuracy) + "%]")
writer.add_scalar('scalar/val_loss', loss_val, i_epoch)
writer.add_scalar('scalar/val_acc', accuracy, i_epoch)
if best_valid_score < accuracy:
path_ckpt_best = r"./checkpoints/best_acc.pth.tar"
torch.save({"epoch": i_epoch, "model_state_dict": model.state_dict(),
"optimizer_state_dict": optimizer.state_dict()}, path_ckpt_best)
best_valid_score = accuracy
writer.close()
if __name__=='__main__':
train()
到这里,从数据到网络,再到整合到一起的训练和验证过程,都完成了。从整个结构上来说,还是比较简单的。亮点就在于这是一个3维的模型,和3维的训练任务。拿二维的思路套在三维这里,是同样适用的。
对上述的代码部分没有逐一的进行介绍,不懂和感兴趣的,可以直接去我的博客主页,查看相关实战项目,有对这块部分拆解的文章,欢迎查看。
如果需要应用,直接改写validation部分即可。这里就不赘述了,后面我们就讲述到的,相信你自己也能改写的比较好。
尽管已经完成了3为分类任务的整个过程,从数据的处理,到模型的构建,再到训练和评估。但依旧存在诸多问题,主要体现在以下几点:
目前想到要改进的就这么两点,也是我在下一篇增强篇里面,着重添加的部分。其中网络部分的模型,前面我已经添加了一个GitHub的链接,可以直接引用过来,替换LeNet3D,亲测有效。
图像增强部分,引入水平、垂直方向翻转、随机旋转、加噪声、滤波、归一化等等,希望通过这些数据增强的实战,能够自己也写几个符合自己数据集的数据增强方式,这是目的。
我有带有Logo图像的公司模型has_attached_file:logo我用他们的Logo创建了许多公司。现在,我需要添加新样式has_attached_file:logo,:styles=>{:small=>"30x15>",:medium=>"155x85>"}我是否应该重新上传所有旧数据以重新生成新样式?我不这么认为……或者有什么rake任务可以重新生成样式吗? 最佳答案 参见Thumbnail-Generation.如果rake任务不适合你,你应该能够在控制台中使用一个片段来调用重新处理!关于相关公司
无论您是想搭建桌面端、WEB端或者移动端APP应用,HOOPSPlatform组件都可以为您提供弹性的3D集成架构,同时,由工业领域3D技术专家组成的HOOPS技术团队也能为您提供技术支持服务。如果您的客户期望有一种在多个平台(桌面/WEB/APP,而且某些客户端是“瘦”客户端)快速、方便地将数据接入到3D应用系统的解决方案,并且当访问数据时,在各个平台上的性能和用户体验保持一致,HOOPSPlatform将帮助您完成。利用HOOPSPlatform,您可以开发在任何环境下的3D基础应用架构。HOOPSPlatform可以帮您打造3D创新型产品,HOOPSSDK包含的技术有:快速且准确的CAD
导读:随着叮咚买菜业务的发展,不同的业务场景对数据分析提出了不同的需求,他们希望引入一款实时OLAP数据库,构建一个灵活的多维实时查询和分析的平台,统一数据的接入和查询方案,解决各业务线对数据高效实时查询和精细化运营的需求。经过调研选型,最终引入ApacheDoris作为最终的OLAP分析引擎,Doris作为核心的OLAP引擎支持复杂地分析操作、提供多维的数据视图,在叮咚买菜数十个业务场景中广泛应用。作者|叮咚买菜资深数据工程师韩青叮咚买菜创立于2017年5月,是一家专注美好食物的创业公司。叮咚买菜专注吃的事业,为满足更多人“想吃什么”而努力,通过美好食材的供应、美好滋味的开发以及美食品牌的孵
本教程将在Unity3D中混合Optitrack与数据手套的数据流,在人体运动的基础上,添加双手手指部分的运动。双手手背的角度仍由Optitrack提供,数据手套提供双手手指的角度。 01 客户端软件分别安装MotiveBody与MotionVenus并校准人体与数据手套。MotiveBodyMotionVenus数据手套使用、校准流程参照:https://gitee.com/foheart_1/foheart-h1-data-summary.git02 数据转发打开MotiveBody软件的Streaming,开始向Unity3D广播数据;MotionVenus中设置->选项选择Unit
Unity自动旋转动画1.开门需要门把手先动,门再动2.关门需要门先动,门把手再动3.中途播放过程中不可以再次进行操作觉得太复杂?查看我的文章开关门简易进阶版效果:如果这个门可以直接打开的话,就不需要放置"门把手"如果门把手还有钥匙需要旋转,那就可以把钥匙放在门把手的"门把手",理论上是可以无限套娃的可调整参数有:角度,反向,轴向,速度运行时点击Test进行测试自己写的代码比较垃圾,命名与结构比较拉,高手轻点喷,新手有类似的需求可以拿去做参考上代码usingSystem.Collections;usingSystem.Collections.Generic;usingUnityEngine;u
之前说过10之后的版本没有3dScan了,所以还是9.8的版本或者之前更早的版本。 3d物体扫描需要先下载扫描的APK进行扫面。首先要在手机上装一个扫描程序,扫描现实中的三维物体,然后上传高通官网,在下载成UnityPackage类型让Unity能够使用这个扫描程序可以从高通官网上进行下载,是一个安卓程序。点到Tools往下滑,找到VuforiaObjectScanner下载后解压数据线连接手机,将apk文件拷入手机安装然后刚才解压文件中的Media文件夹打开,两个PDF图打印第一张A4-ObjectScanningTarget.pdf,主要是用来辅助扫描的。好了,接下来就是扫描三维物体。将瓶
C#实现简易绘图工具一.引言实验目的:通过制作窗体应用程序(C#画图软件),熟悉基本的窗体设计过程以及控件设计,事件处理等,熟悉使用C#的winform窗体进行绘图的基本步骤,对于面向对象编程有更加深刻的体会.Tutorial任务设计一个具有基本功能的画图软件**·包括简单的新建文件,保存,重新绘图等功能**·实现一些基本图形的绘制,包括铅笔和基本形状等,学习橡皮工具的创建**·设计一个合理舒适的UI界面**注明:你可能需要先了解一些关于winform窗体应用程序绘图的基本知识,以及关于GDI+类和结构的知识二.实验环境Windows系统下的visualstudio2017C#窗体应用程序三.
1.postman介绍Postman一款非常流行的API调试工具。其实,开发人员用的更多。因为测试人员做接口测试会有更多选择,例如Jmeter、soapUI等。不过,对于开发过程中去调试接口,Postman确实足够的简单方便,而且功能强大。2.下载安装官网地址:https://www.postman.com/下载完成后双击安装吧,安装过程极其简单,无需任何操作3.使用教程这里以百度为例,工具使用简单,填写URL地址即可发送请求,在下方查看响应结果和响应状态码常用方法都有支持请求方法:getpostputdeleteGet、Post、Put与Delete的作用get:请求方法一般是用于数据查询,
Ⅰ软件测试基础一、软件测试基础理论1、软件测试的必要性所有的产品或者服务上线都需要测试2、测试的发展过程3、什么是软件测试找bug,发现缺陷4、测试的定义使用人工或自动的手段来运行或者测试某个系统的过程。目的在于检测它是否满足规定的需求。弄清预期结果和实际结果的差别。5、测试的目的以最小的人力、物力和时间找出软件中潜在的错误和缺陷6、测试的原则28原则:20%的主要功能要重点测(eg:支付宝的支付功能,其他功能都是次要的)80%的错误存在于20%的代码中7、测试标准8、测试的基本要求功能测试性能测试安全性测试兼容性测试易用性测试外观界面测试可靠性测试二、质量模型衡量一个优秀软件的维度①功能性功
需求:要创建虚拟机,就需要给他提供一个虚拟的磁盘,我们就在/opt目录下创建一个10G大小的raw格式的虚拟磁盘CentOS-7-x86_64.raw命令格式:qemu-imgcreate-f磁盘格式磁盘名称磁盘大小qemu-imgcreate-f磁盘格式-o?1.创建磁盘qemu-imgcreate-fraw/opt/CentOS-7-x86_64.raw10G执行效果#ls/opt/CentOS-7-x86_64.raw2.安装虚拟机使用virt-install命令,基于我们提供的系统镜像和虚拟磁盘来创建一个虚拟机,另外在创建虚拟机之前,提前打开vnc客户端,在创建虚拟机的时候,通过vnc