

const uint8_t MPU6050_REGISTER_PWR_MGMT_1 = 0x6B;
I2C_Write(MPU6050SlaveAddress, MPU6050_REGISTER_PWR_MGMT_1, 0x01);const uint8_t MPU6050_REGISTER_INT_ENABLE = 0x38;
I2C_Write(MPU6050SlaveAddress, MPU6050_REGISTER_INT_ENABLE, 0x01);
const uint8_t MPU6050_REGISTER_USER_CTRL = 0x6A;
I2C_Write(MPU6050SlaveAddress, MPU6050_REGISTER_USER_CTRL, 0x00);const uint8_t MPU6050_REGISTER_FIFO_EN = 0x23;
I2C_Write(MPU6050SlaveAddress, MPU6050_REGISTER_FIFO_EN, 0x00);const uint8_t MPU6050_REGISTER_SMPLRT_DIV = 0x19;
I2C_Write(MPU6050SlaveAddress, MPU6050_REGISTER_SMPLRT_DIV, 0x07);const uint8_t MPU6050_REGISTER_CONFIG = 0x1A;
I2C_Write(MPU6050SlaveAddress, MPU6050_REGISTER_CONFIG, 0x00);const uint8_t MPU6050_REGISTER_PWR_MGMT_2 = 0x6C;
I2C_Write(MPU6050SlaveAddress, MPU6050_REGISTER_PWR_MGMT_2, 0x00);
q0=quat[0] / q30;//q30格式转换为浮点数
q1=quat[1] / q30;
q2=quat[2] / q30;
q3=quat[3] / q30; //计算得到ypr:pitch俯仰角/roll横滚角/yaw航向角
pitch=asin(-2 * q1 * q3 + 2 * q0* q2)* 57.3;//俯仰角
roll=atan2(2 * q2 * q3 + 2 * q0 * q1, -2 * q1 * q1 - 2 * q2* q2 + 1)* 57.3;//横滚角
yaw=atan2(2*(q1q2 + q0q3),q0q0+q1q1-q2q2-q3q3) * 57.3;//航向角 float valSums[7] = {0.0f, 0.0f, 0.0f, 0.0f, 0.0f, 0.0f, 0.0};
//先求和
for (int i = 0; i < nCalibTimes; ++i) {
int mpuVals[nValCnt];
ReadAccGyr(mpuVals);
for (int j = 0; j < nValCnt; ++j) {
valSums[j] += mpuVals[j];
}
}
//再求平均
for (int i = 0; i < nValCnt; ++i) {
calibData[i] = int(valSums[i] / nCalibTimes);
}
calibData[2] += 16384;
#include <Wire.h>
// MPU6050 Slave Device Address
const uint8_t MPU6050SlaveAddress = 0x68;//MPU6050的I2C地址
// Select SDA and SCL pins for I2C communication
const uint8_t scl = D6;
const uint8_t sda = D7;
// sensitivity scale factor respective to full scale setting provided in datasheet
const uint16_t AccelScaleFactor = 16384;
const uint16_t GyroScaleFactor = 131;
// MPU6050 few configuration register addresses
const uint8_t MPU6050_REGISTER_SMPLRT_DIV = 0x19;
const uint8_t MPU6050_REGISTER_USER_CTRL = 0x6A;
const uint8_t MPU6050_REGISTER_PWR_MGMT_1 = 0x6B;
const uint8_t MPU6050_REGISTER_PWR_MGMT_2 = 0x6C;
const uint8_t MPU6050_REGISTER_CONFIG = 0x1A;
const uint8_t MPU6050_REGISTER_GYRO_CONFIG = 0x1B;
const uint8_t MPU6050_REGISTER_ACCEL_CONFIG = 0x1C;
const uint8_t MPU6050_REGISTER_FIFO_EN = 0x23;
const uint8_t MPU6050_REGISTER_INT_ENABLE = 0x38;
const uint8_t MPU6050_REGISTER_ACCEL_XOUT_H = 0x3B;//我们感兴趣的数据位于 0X3B 到 0X48 这14个字节的寄存器当中
const uint8_t MPU6050_REGISTER_SIGNAL_PATH_RESET = 0x68;
int16_t AccelX, AccelY, AccelZ, Temperature, GyroX, GyroY, GyroZ;
void setup() {
Serial.begin(115200);
Wire.begin(sda, scl);
MPU6050_Init();
}
void loop() {
double Ax, Ay, Az, T, Gx, Gy, Gz;
Read_RawValue(MPU6050SlaveAddress, MPU6050_REGISTER_ACCEL_XOUT_H);
//divide each with their sensitivity scale factor
Ax = (double)AccelX/AccelScaleFactor;
Ay = (double)AccelY/AccelScaleFactor;
Az = (double)AccelZ/AccelScaleFactor;
T = (double)Temperature/340+36.53; //temperature formula
Gx = (double)GyroX/GyroScaleFactor;
Gy = (double)GyroY/GyroScaleFactor;
Gz = (double)GyroZ/GyroScaleFactor;
Serial.print("Ax: "); Serial.print(Ax);
Serial.print(";Ay: "); Serial.print(Ay);
Serial.print(";Az: "); Serial.print(Az);
Serial.print(";T: "); Serial.print(T);
Serial.print(";Gx: "); Serial.print(Gx);
Serial.print(";Gy: "); Serial.print(Gy);
Serial.print(";Gz: "); Serial.println(Gz);
delay(100);
}
void I2C_Write(uint8_t deviceAddress, uint8_t regAddress, uint8_t data){
Wire.beginTransmission(deviceAddress);
Wire.write(regAddress);
Wire.write(data);
Wire.endTransmission();
}
// read all 14 register
void Read_RawValue(uint8_t deviceAddress, uint8_t regAddress){
Wire.beginTransmission(deviceAddress);
Wire.write(regAddress);
Wire.endTransmission();
Wire.requestFrom(deviceAddress, (uint8_t)14);
AccelX = (((int16_t)Wire.read()<<8) | Wire.read());
AccelY = (((int16_t)Wire.read()<<8) | Wire.read());
AccelZ = (((int16_t)Wire.read()<<8) | Wire.read());
Temperature = (((int16_t)Wire.read()<<8) | Wire.read());
GyroX = (((int16_t)Wire.read()<<8) | Wire.read());
GyroY = (((int16_t)Wire.read()<<8) | Wire.read());
GyroZ = (((int16_t)Wire.read()<<8) | Wire.read());
}
//configure MPU6050
void MPU6050_Init(){
delay(150);
I2C_Write(MPU6050SlaveAddress, MPU6050_REGISTER_SMPLRT_DIV, 0x07);
I2C_Write(MPU6050SlaveAddress, MPU6050_REGISTER_PWR_MGMT_1, 0x01);
I2C_Write(MPU6050SlaveAddress, MPU6050_REGISTER_PWR_MGMT_2, 0x00);
I2C_Write(MPU6050SlaveAddress, MPU6050_REGISTER_CONFIG, 0x00);
I2C_Write(MPU6050SlaveAddress, MPU6050_REGISTER_GYRO_CONFIG, 0x00);//set +/-250 degree/second full scale
I2C_Write(MPU6050SlaveAddress, MPU6050_REGISTER_ACCEL_CONFIG, 0x00);// set +/- 2g full scale
I2C_Write(MPU6050SlaveAddress, MPU6050_REGISTER_FIFO_EN, 0x00);
I2C_Write(MPU6050SlaveAddress, MPU6050_REGISTER_INT_ENABLE, 0x01);
I2C_Write(MPU6050SlaveAddress, MPU6050_REGISTER_SIGNAL_PATH_RESET, 0x00);
I2C_Write(MPU6050SlaveAddress, MPU6050_REGISTER_USER_CTRL, 0x00);
}#define OUTPUT_READABLE_YAWPITCHROLL#define OUTPUT_TEAPOT


attachInterrupt(digitalPinToInterrupt(INTERRUPT_PIN), dmpDataReady, RISING);
mpuIntStatus = mpu.getIntStatus();
void Ano_Init(void)
{
MyAno.Head = FRAME_HEADER;//0XAA是帧头
MyAno.Addr = GENERAL_OUTPUT_ADDR;//地址码为0xFF,指的是无特定目标,用于数据广播型输出
MyAno.Lenth = 0;
}
//-----------------与匿名上位机通讯-----------------------------
/** 发送灵活格式帧,帧ID为0xF1~0xFA
* 功能:发送加速度传感器和陀螺仪传感器数据给匿名上位机(V7)
* 入口参数:第一个参数accel,它的三个元素是xyz三个方向的加速度值
* 第二个参数gyro,它的三个元素是xyz三个方向的陀螺仪值
* 返回值:无
* 注:数据格式:帧头0xAA+目标地址0xFF+功能码0xF1+数据长度LEN+DATA+和校验SC+附加校验AC
*/
void mpu6050_send_data2ano(VectorInt16 *accel,VectorInt16 *gyro)
{
uint8_t nul = 0;
Ano_Set_Mdata(0xF1,(int16_t*)&accel->x,sizeof(accel->x),1);
Ano_Set_Mdata(0xF1,(int16_t*)&accel->y,sizeof(accel->y),2);
Ano_Set_Mdata(0xF1,(int16_t*)&accel->z,sizeof(accel->z),3);
Ano_Set_Mdata(0xF1,(int16_t*)&gyro->x,sizeof(gyro->x),4);
Ano_Set_Mdata(0xF1,(int16_t*)&gyro->y,sizeof(gyro->y),5);
Ano_Set_Mdata(0xF1,(int16_t*)&gyro->z,sizeof(gyro->z),6);
Ano_Set_Mdata(0xF1,(uint8_t*)&nul,sizeof(nul),7);//加载数据到对应的数据位
Ano_SendMdata();//发送数据
}







//-----------------与匿名上位机通讯-----------------------------
/** 发送基本信息类帧,功能码ID为0x01~0x04之间,在飞控通信协议里属于飞控相关信息类
* 功能:发送惯性传感器、欧拉角等数据给匿名上位机(V7)
* 入口参数:第一个参数accel,它的三个元素是xyz三个方向的加速度值
* 第二个参数gyro,它的三个元素是xyz三个方向的陀螺仪值
* 第三个参数ypr,这是一个float[]数组,分别是yaw/pitch/roll angles原始值
* 返回值:无
* 注:数据格式:帧头0xAA+目标地址0xFF+功能码+数据长度LEN+DATA+和校验SC+附加校验AC
* 注:为了提高数据传输的效率,当有浮点数类型数据需要传输时,根据数据类型的特点,适当截取小数点后固定几
位,比如飞控姿态数据,保留角度的小数点后两位即可(即乘以100)。
将浮点数转化成整数类型进行传输,可缩短数据长度,并且避免浮点数传输时发生异
常,解析成非法浮点数。
*/
void mpu6050_send_flydata2ano(VectorInt16 *accel,VectorInt16 *gyro,float *ypr)
{
uint8_t nul = 0;
//ID:0x01:惯性传感器数据
//DATA 区域内容:
//ACC、GYR:依次为加速度、陀螺仪传感器数据。
//SHOCK_STA:震动状态
Ano_Set_Mdata(0x01,(int16_t*)&accel->x,sizeof(accel->x),1);
Ano_Set_Mdata(0x01,(int16_t*)&accel->y,sizeof(accel->y),2);
Ano_Set_Mdata(0x01,(int16_t*)&accel->z,sizeof(accel->z),3);
Ano_Set_Mdata(0x01,(int16_t*)&gyro->x,sizeof(gyro->x),4);
Ano_Set_Mdata(0x01,(int16_t*)&gyro->y,sizeof(gyro->y),5);
Ano_Set_Mdata(0x01,(int16_t*)&gyro->z,sizeof(gyro->z),6);
Ano_Set_Mdata(0x01,(uint8_t*)&nul,sizeof(nul),7);
Ano_SendMdata();//发送数据
//ID:0x03:飞控姿态:欧拉角格式
//DATA 区域内容:
//ROL、PIT、YAW:姿态角,依次为横滚、俯仰、航向,精确到 0.01。
//FUSION _STA:融合状态
//注意:角度最终要乘以100,上位机那边会除以100做展示
int16_t rol = (int16_t)(ypr[2] * 180 * 100.00 / M_PI);
int16_t pit = (int16_t)(ypr[1] * 180 * 100.00 / M_PI);
int16_t yaw = (int16_t)(ypr[0] * 180 * 100.00 / M_PI);
Ano_Set_Mdata(0x03,(int16_t*)&rol,sizeof(rol),1);
Ano_Set_Mdata(0x03,(int16_t*)&pit,sizeof(pit),2);
Ano_Set_Mdata(0x03,(int16_t*)&yaw,sizeof(yaw),3);
Ano_Set_Mdata(0x03,(uint8_t*)&nul,sizeof(nul),4);
Ano_SendMdata();//发送数据
}


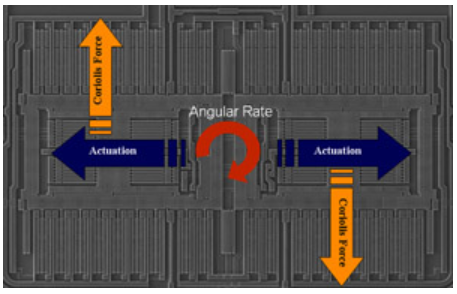
目录关于MPU6050芯片关于小板关于厂家和DATASHEET关于漂移关于角加速度还是角速度关于精度和量程(可调,可选)关于功耗,陀螺仪+加速器工作电流:3.8mA(全功率,陀螺仪在所有速率下,在1kHz采样率下加速)采样率高,功耗也高可以参考 MPU6050陀螺仪与Processing和匿名上位机飞控联动实录-知乎关于MPU6050芯片MPU6050传感器模块是6轴运动跟踪设备。包含3轴陀螺仪、3轴加速度计、运动处理器、温度传感器。I2C总线接口,可与微控制器进行通信。通过辅助I2C总线与其他传感器设备通信,如3轴磁力计、压力传感器等。如果3轴磁力计连接到辅助I2C总线,则MPU6050可
Processing.js有sleep()函数吗?如果不是,在draw()循环中添加延迟的合适替代方法是什么?我在处理中使用JQuery-我可以使用JQuery或Javascript函数在循环中引起sleep类型延迟吗?谢谢! 最佳答案 处理有一个delay()功能,但不幸的是,该功能尚未在Processing.js中实现。不过,您可以将JS(JQuery等)与Processing混合使用。Processing1.9.9现在有一个Javascript模式,并且有处理/DOM集成的示例,例如SelectionFlower.在sketc
这是”四轮车驱动控制”系列,分多个小节来介绍:1.八.四轮车驱动开发之一:正/逆向运动学分析2.九.四轮车驱动开发之二:配置PWM驱动直流电机3.十.四轮车驱动开发之三:巧用编码器获取电机转速信息4.十一.四轮车驱动开发之四:理解直流电机PID控制器5.十二.四轮车驱动开发之五:由浅至深理解6轴陀螺仪姿态解算算法(上) 十三.四轮车驱动开发之五:由浅至深理解6轴陀螺仪姿态解算算法(中) 十四.四轮车驱动开发之五:由浅至深理解6轴陀螺仪姿态解算算法(下) ==================================================================
我一直在阅读有关Javascript语言中两个(相对)新概念的文章-WebWorkers和JohnResig的很棒的Processing.js(好吧,这并不是一个新的“Javascript概念”,但你明白我的意思)。互联网上流传着一些很好的例子,但我还没有找到一个有效地使用这两种技术的例子。它对我来说看起来非常有趣和强大,所以我想我最好试一试。但是,我真的想不出最好的脚本设计来集成它们两者......在我看来,通常,当使用Processing.js时,一些类是在'处理应用程序'。它允许您使用类似Java的语法来解决这个问题。然而,这些类只能在处理应用程序中访问——这是显而易见的。但是我
我使用的是当前版本的JQueryDatatable。我已经实现了服务器端处理。有没有办法放置我们自己的正在加载GIF而不是默认文本“正在处理”?这是我的HTML代码:Request#DescriptionCreatedBy这是我的JS代码:$('#table').DataTable({"dom":'rt',//DataTableelementposition"lengthMenu":[[10,25,50,100,500],[10,25,50,100,500]],//pagelengthoptions"pageLength":25,//defaultpagelength"pagingTy
我正在寻找processing.js的示例通过ExplorerCanvas在InternetExplorer中工作或类似的。 最佳答案 这是可以做到的!然而,也有一些陷阱。Thepagehtxtlinksto很好,就目前而言,但请注意以下几点:1)script和canvas元素都必须有id属性。init函数使用这些属性id将给定的脚本与给定的Canvas相关联。我发现简化的init函数比官方的更容易理解。如果您在一页上有多个Canvas,您将想要掌握官方的。2)如果您使用互联网风格的颜色名称,例如#23ff9a,请注意!IE8需要来
QT上位机控制stm32,并利用PID控制编码电机旋转 由于最近在学习电机控制算法之类的东西,看到论文大多使用PID、或以PID衍生的ADRC作为电机的主流控制,于是自己也写了一个stm32控制L298N以驱动直流电机的程序,并用QT做了一个上位机实现了用软件改变PID的参数、电机转速、转向等功能。一、硬件原理图 实验所用到的硬件有:带霍尔编码器的直流减速电机; 霍尔编码器具体型号为JGB37-520,12V供电,一分钟旋转110转(这里指的时全速运转下的转速),两端红白两线为电机的电源(0、12V),棕蓝两线为霍尔编码器的电源(0、3.3V),中间黄绿两线为霍尔编
我必须将像ü这样的字符作为unicode字符但作为ASCII安全字符串发送到服务器。所以它必须是\u00fc(6个字符)而不是字符本身。但是在JSON.stringify之后,无论我用它做了什么,它总是得到ü。如果我使用像\\u00fc这样的2个反斜杠,那么我也会在JSON字符串中得到2个反斜杠,这也不好。重要约束:我无法在JSON.stringify之后修改字符串,它是没有解决方法的框架的一部分,我们不想fork整个包.这能做到吗?如果是,怎么办? 最佳答案 如果出于某种原因,您希望您的JSON是ASCII安全的,请在json编码
如前所述,processing.js如何响应浏览器的大小?(响应式设计)我试过screen.width和screen.height但效果不佳。好像只能检测电脑屏幕的大小。此外,我想在拖动和更改浏览器大小时跟上窗口的大小 最佳答案 size(window.innerWidth,window.innerHeight);根据https://groups.google.com/forum/?fromgroups=#!topic/processingjs/2-U_P7_BHlY或voidsetup(){size($(window).width
我正在考虑制作一个使用相当密集的JavaScript/canvas的网站,我一直在查看Processing.js在我看来,这将使操作Canvas变得更加容易。有谁知道我不应该使用Processing.js的原因吗?我知道旧版浏览器将无法使用它,但现在没关系。 最佳答案 如前所述,Processing.js(包括IE8beta)不支持IE。我还发现,与仅使用Canvas相比,processing.js在性能方面有点慢(特别是如果您使用Processing语言解析字符串,而不是使用javascriptAPI)。与处理包装器相比,我个人更