stm32驱动DHT11采集温湿度
1.单总线通信
2.DHT11工作过程:
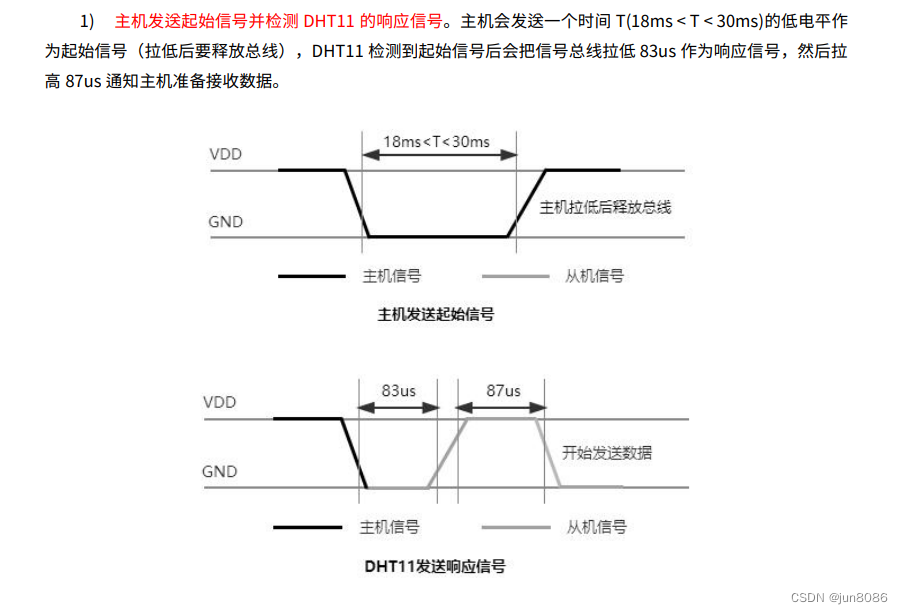
(1)查看总线上是否存在DHT11设备以及DHT11的响应;
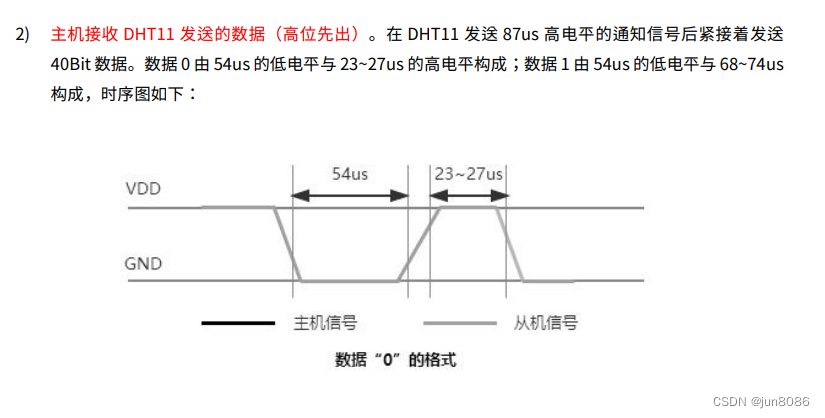
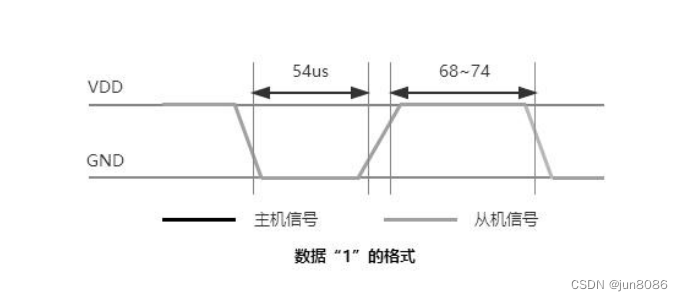
(2)DHT11发送数据
这个单总线数据的传输,类似下面的过程:
<确定传输是否可行>
老板问你:小D你在不在?(主机拉低30ms)
小 D: 老板我在?(拉低83us)
小 D: 老板收消息!(拉高87us)
<开始传输消息>
小D:传个0。 (先拉低54us,再拉高27us)
小D:再传个1哦~(先拉低54us,在拉高74us)
//文件名:dht11.c
#include "dht11.h"
/*
tim2delay.h 使用定时做的延时函数的头文件,
可以查看博客:stm32使用定时器精确延时
*/
#include "tim2delay.h"
#define delay_ms Tim2Delayms
#define delay_us Tim2Delayus
//复位DHT11
void DHT11_Rst(void)
{
DHT11_IO_OUT(GPIO_PIN_SET); //SET OUTPUT
DHT11_DQ_OUT=0; //拉低DQ
delay_ms(20); //拉低至少18ms
DHT11_DQ_OUT=1; //DQ=1
delay_us(30); //主机拉高20~40us
}
//等待DHT11的回应
//返回1:未检测到DHT11的存在
//返回0:存在
u8 DHT11_Check(void)
{
u8 retry=0;
DHT11_IO_IN();//SET INPUT
while (DHT11_DQ_IN&&retry<100)//DHT11会拉低40~80us
{
retry++;
delay_us(1);
};
if(retry>=100)return 1;
else retry=0;
while (!DHT11_DQ_IN&&retry<100)//DHT11拉低后会再次拉高40~80us
{
retry++;
delay_us(1);
};
if(retry>=100)return 1;
return 0;
}
//从DHT11读取一个位
//返回值:1/0
u8 DHT11_Read_Bit(void)
{
u8 retry=0;
while(DHT11_DQ_IN&&retry<100)//等待变为低电平
{
retry++;
delay_us(1);
}
retry=0;
while(!DHT11_DQ_IN&&retry<100)//等待变高电平
{
retry++;
delay_us(1);
}
delay_us(40);//等待40us
if(DHT11_DQ_IN)return 1;
else return 0;
}
//从DHT11读取一个字节
//返回值:读到的数据
u8 DHT11_Read_Byte(void)
{
u8 i,dat;
dat=0;
for (i=0;i<8;i++)
{
dat<<=1;
dat|=DHT11_Read_Bit();
}
return dat;
}
//从DHT11读取一次数据
//temp:温度值(范围:0~50°)
//humi:湿度值(范围:20%~90%)
//返回值:0,正常;1,读取失败
u8 DHT11_Read_Data(u8 *temp,u8 *humi)
{
u8 buf[5];
u8 i;
DHT11_Rst();
if(DHT11_Check()==0)
{
for(i=0;i<5;i++)//读取40位数据
{
buf[i]=DHT11_Read_Byte();
}
if((buf[0]+buf[1]+buf[2]+buf[3])==buf[4])
{
*humi=buf[0];
*temp=buf[2];
}
}else return 1;
return 0;
}
//初始化DHT11的IO口 DQ 同时检测DHT11的存在
//返回1:不存在
//返回0:存在
u8 DHT11_Init(void)
{
GPIO_init_output(GPIO_PIN_SET);//初始化PB12
DHT11_Rst(); //复位DHT11
return DHT11_Check();//等待DHT11的回应
}
//文件名:dht11.h
#ifndef __DHT11_H
#define __DHT11_H
#include "stdint.h"
#include "gpio.h"
//IO方向设置
#define DHT11_IO_IN() {GPIO_init_input();}
#define DHT11_IO_OUT(STATE) {GPIO_init_output(STATE);}//state set gpio 0 or 1
//IO操作函数
#define DHT11_DQ_OUT PAout(8) //数据端口 PA8
#define DHT11_DQ_IN PAin(8) //数据端口 PA8
uint8_t DHT11_Init(void);//初始化DHT11
uint8_t DHT11_Read_Data(uint8_t *temp,uint8_t *humi);//读取温湿度
uint8_t DHT11_Read_Byte(void);//读出一个字节
uint8_t DHT11_Read_Bit(void);//读出一个位
uint8_t DHT11_Check(void);//检测是否存在DHT11
void DHT11_Rst(void);//复位DHT11
#endif
void GPIO_init_input(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/*Configure GPIO pin : PA8 */
GPIO_InitStruct.Pin = GPIO_PIN_8;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
}
/*
函数名:GPIO_init_output(GPIO_PinState state)
功能:设置IO口为输出模式,state是输出高电平还是低电平
*/
void GPIO_init_output(GPIO_PinState state)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/*Configure GPIO pin : PB8 */
GPIO_InitStruct.Pin = GPIO_PIN_8;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_MEDIUM;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_8, state);
}
//文件名:sys.h
#ifndef _SYS_H
#define _SYS_H
#include "stm32f4xx_hal.h"
//0,²»Ö§³Öos
//1,Ö§³Öos
#define SYSTEM_SUPPORT_OS 1 //¶¨ÒåϵͳÎļþ¼ÐÊÇ·ñÖ§³ÖOS
///
//¶¨ÒåһЩ³£ÓõÄÊý¾ÝÀàÐͶ̹ؼü×Ö
typedef int32_t s32;
typedef int16_t s16;
typedef int8_t s8;
typedef const int32_t sc32;
typedef const int16_t sc16;
typedef const int8_t sc8;
typedef __IO int32_t vs32;
typedef __IO int16_t vs16;
typedef __IO int8_t vs8;
typedef __I int32_t vsc32;
typedef __I int16_t vsc16;
typedef __I int8_t vsc8;
typedef uint32_t u32;
typedef uint16_t u16;
typedef uint8_t u8;
typedef const uint32_t uc32;
typedef const uint16_t uc16;
typedef const uint8_t uc8;
typedef __IO uint32_t vu32;
typedef __IO uint16_t vu16;
typedef __IO uint8_t vu8;
typedef __I uint32_t vuc32;
typedef __I uint16_t vuc16;
typedef __I uint8_t vuc8;
//λ´ø²Ù×÷,ʵÏÖ51ÀàËƵÄGPIO¿ØÖƹ¦ÄÜ
//IO¿Ú²Ù×÷ºê¶¨Òå
#define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF)<<5)+(bitnum<<2))
#define MEM_ADDR(addr) *((volatile unsigned long *)(addr))
#define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum))
//IO¿ÚµØÖ·Ó³Éä
#define GPIOA_ODR_Addr (GPIOA_BASE+20) //0x40020014
#define GPIOB_ODR_Addr (GPIOB_BASE+20) //0x40020414
#define GPIOC_ODR_Addr (GPIOC_BASE+20) //0x40020814
#define GPIOD_ODR_Addr (GPIOD_BASE+20) //0x40020C14
#define GPIOE_ODR_Addr (GPIOE_BASE+20) //0x40021014
#define GPIOF_ODR_Addr (GPIOF_BASE+20) //0x40021414
#define GPIOG_ODR_Addr (GPIOG_BASE+20) //0x40021814
#define GPIOH_ODR_Addr (GPIOH_BASE+20) //0x40021C14
#define GPIOI_ODR_Addr (GPIOI_BASE+20) //0x40022014
#define GPIOJ_ODR_ADDr (GPIOJ_BASE+20) //0x40022414
#define GPIOK_ODR_ADDr (GPIOK_BASE+20) //0x40022814
#define GPIOA_IDR_Addr (GPIOA_BASE+16) //0x40020010
#define GPIOB_IDR_Addr (GPIOB_BASE+16) //0x40020410
#define GPIOC_IDR_Addr (GPIOC_BASE+16) //0x40020810
#define GPIOD_IDR_Addr (GPIOD_BASE+16) //0x40020C10
#define GPIOE_IDR_Addr (GPIOE_BASE+16) //0x40021010
#define GPIOF_IDR_Addr (GPIOF_BASE+16) //0x40021410
#define GPIOG_IDR_Addr (GPIOG_BASE+16) //0x40021810
#define GPIOH_IDR_Addr (GPIOH_BASE+16) //0x40021C10
#define GPIOI_IDR_Addr (GPIOI_BASE+16) //0x40022010
//IO¿Ú²Ù×÷,Ö»¶Ôµ¥Ò»µÄIO¿Ú!
//È·±£nµÄֵСÓÚ16!
#define PAout(n) BIT_ADDR(GPIOA_ODR_Addr,n) //Êä³ö
#define PAin(n) BIT_ADDR(GPIOA_IDR_Addr,n) //ÊäÈë
#define PBout(n) BIT_ADDR(GPIOB_ODR_Addr,n) //Êä³ö
#define PBin(n) BIT_ADDR(GPIOB_IDR_Addr,n) //ÊäÈë
#define PCout(n) BIT_ADDR(GPIOC_ODR_Addr,n) //Êä³ö
#define PCin(n) BIT_ADDR(GPIOC_IDR_Addr,n) //ÊäÈë
#define PDout(n) BIT_ADDR(GPIOD_ODR_Addr,n) //Êä³ö
#define PDin(n) BIT_ADDR(GPIOD_IDR_Addr,n) //ÊäÈë
#define PEout(n) BIT_ADDR(GPIOE_ODR_Addr,n) //Êä³ö
#define PEin(n) BIT_ADDR(GPIOE_IDR_Addr,n) //ÊäÈë
#define PFout(n) BIT_ADDR(GPIOF_ODR_Addr,n) //Êä³ö
#define PFin(n) BIT_ADDR(GPIOF_IDR_Addr,n) //ÊäÈë
#define PGout(n) BIT_ADDR(GPIOG_ODR_Addr,n) //Êä³ö
#define PGin(n) BIT_ADDR(GPIOG_IDR_Addr,n) //ÊäÈë
#define PHout(n) BIT_ADDR(GPIOH_ODR_Addr,n) //Êä³ö
#define PHin(n) BIT_ADDR(GPIOH_IDR_Addr,n) //ÊäÈë
#define PIout(n) BIT_ADDR(GPIOI_ODR_Addr,n) //Êä³ö
#define PIin(n) BIT_ADDR(GPIOI_IDR_Addr,n) //ÊäÈë
//ÒÔÏÂΪ»ã±àº¯Êý
void WFI_SET(void); //Ö´ÐÐWFIÖ¸Áî
void INTX_DISABLE(void);//¹Ø±ÕËùÓÐÖжÏ
void INTX_ENABLE(void); //¿ªÆôËùÓÐÖжÏ
void MSR_MSP(u32 addr); //ÉèÖöÑÕ»µØÖ·
#endif
4.使用定时器的延时函数,因为在使用过程中与其他模块共用延时函数,导致启动其它模块之后,DHT11就不能正常的输出温湿度数据,所以,最好使用一个独立的定时器来做延时,然后修改下面宏定义就可以了。使用独立的定时器来做精确延时见博客:
把下面的函数放在主函数中运行。
void Dht11GetData(void)
{
uint8_t datapost[128];
//strcpy((char *)datapost,"hello world");
int flag = DHT11_Read_Data(&temp,&buf);
if(flag == 0)
{
//printf("T:%d, H:%d\r\n",temp,buf);
dataPacking(datapost,tempture,temp);
uart2DataSend(datapost,sizeof(datapost));
dataPacking(datapost,shidu,buf);
uart2DataSend(datapost,sizeof(datapost));
}
else
{
printf("err:%d\r\n",flag);
}
HAL_Delay(2000);
}
按照目前的情况,这个问题不适合我们的问答形式。我们希望答案得到事实、引用或专业知识的支持,但这个问题可能会引发辩论、争论、投票或扩展讨论。如果您觉得这个问题可以改进并可能重新打开,visitthehelpcenter指导。关闭10年前。问题1)我想知道rubyonrails是否有功能类似于primefaces的gem。我问的原因是如果您使用primefaces(http://www.primefaces.org/showcase-labs/ui/home.jsf),开发人员无需担心javascript或jquery的东西。据我所知,JSF是一个规范,基于规范的各种可用实现,prim
本教程将在Unity3D中混合Optitrack与数据手套的数据流,在人体运动的基础上,添加双手手指部分的运动。双手手背的角度仍由Optitrack提供,数据手套提供双手手指的角度。 01 客户端软件分别安装MotiveBody与MotionVenus并校准人体与数据手套。MotiveBodyMotionVenus数据手套使用、校准流程参照:https://gitee.com/foheart_1/foheart-h1-data-summary.git02 数据转发打开MotiveBody软件的Streaming,开始向Unity3D广播数据;MotionVenus中设置->选项选择Unit
运行bundleinstall后出现此错误:Gem::Package::FormatError:nometadatafoundin/Users/jeanosorio/.rvm/gems/ruby-1.9.3-p286/cache/libv8-3.11.8.13-x86_64-darwin-12.gemAnerroroccurredwhileinstallinglibv8(3.11.8.13),andBundlercannotcontinue.Makesurethat`geminstalllibv8-v'3.11.8.13'`succeedsbeforebundling.我试试gemin
文章目录1.开发板选择*用到的资源2.串口通信(个人理解)3.代码分析(注释比较详细)1.主函数2.串口1配置3.串口2配置以及中断函数4.注意问题5.源码链接1.开发板选择我用的是STM32F103RCT6的板子,不过代码大概在F103系列的板子上都可以运行,我试过在野火103的霸道板上也可以,主要看一下串口对应的引脚一不一样就行了,不一样的就更改一下。*用到的资源keil5软件这里用到了两个串口资源,采集数据一个,串口通信一个,板子对应引脚如下:串口1,TX:PA9,RX:PA10串口2,TX:PA2,RX:PA32.串口通信(个人理解)我就从串口采集传感器数据这个过程说一下我自己的理解,
我正在运行Ubuntu11.10并像这样安装Ruby1.9:$sudoapt-getinstallruby1.9rubygems一切都运行良好,但ri似乎有空文档。ri告诉我文档是空的,我必须安装它们。我执行此操作是因为我读到它会有所帮助:$rdoc--all--ri现在,当我尝试打开任何文档时:$riArrayNothingknownaboutArray我搜索的其他所有内容都是一样的。 最佳答案 这个呢?apt-getinstallri1.8编辑或者试试这个:(非rvm)geminstallrdocrdoc-datardoc-da
我正在使用PostgreSQL9.1.3(x86_64-pc-linux-gnu上的PostgreSQL9.1.3,由gcc-4.6.real(Ubuntu/Linaro4.6.1-9ubuntu3)4.6.1,64位编译)和在ubuntu11.10上运行3.2.2或3.2.1。现在,我可以使用以下命令连接PostgreSQLsupostgres输入密码我可以看到postgres=#我将以下详细信息放在我的config/database.yml中并执行“railsdb”,它工作正常。开发:adapter:postgresqlencoding:utf8reconnect:falsedat
LL库和HAL库简介LL:Low-Layer,底层库HAL:HardwareAbstractionLayer,硬件抽象层库LL库和hal库对比,很精简,这实际上是一个精简的库。LL库的配置选择如下:在STM32CUBEMX中,点击菜单的“ProjectManager”–>“AdvancedSettings”,在下面的界面中选择“AdvancedSettings”,然后在每个模块后面选择使用的库总结:1、如果使用的MCU是小容量的,那么STM32CubeLL将是最佳选择;2、如果结合可移植性和优化,使用STM32CubeHAL并使用特定的优化实现替换一些调用,可保持最大的可移植性。另外HAL和L
我使用的是最新版本的Chrome(32.0.1700.107)和Chrome驱动程序(V2.8)。但是当我在Ruby中使用以下代码运行示例测试时:require'selenium-webdriver'WAIT=Selenium::WebDriver::Wait.new(timeout:100)$driver=Selenium::WebDriver.for:chrome$driver.manage.window.maximize$driver.navigate.to'https://www.google.co.in'defapps_hoverele_hover=$driver.find_
我目前有一个运行Ruby1.8.7和Rails2.3.2的RubyonRails项目我有一些从数据库中读取数据的单元测试,特别是两个连续项目的日期时间列,这两个项目应该相隔24小时。在一项测试中,我将项目2的日期时间设置为与项目1的日期时间相同。当我执行断言以确保两个值相等时,测试在rails2.3.2下工作正常。当我升级到rails2.3.11时,测试失败显示两次之间的差异将关闭并出现以下错误:expectedbutwas.这两个版本的rails中似乎存在浮点转换问题。如何解决float问题? 最佳答案 这也发生在我身上,我最终这
按照目前的情况,这个问题不适合我们的问答形式。我们希望答案得到事实、引用或专业知识的支持,但这个问题可能会引发辩论、争论、投票或扩展讨论。如果您觉得这个问题可以改进并可能重新打开,visitthehelpcenter指导。关闭9年前。多年来,我一直在使用多种语言进行编程,并且认为自己总体上相当擅长。但是,我从未编写过任何自动化测试:没有单元测试,没有TDD,没有BDD,什么都没有。我已经尝试开始为我的项目编写适当的测试套件。我可以看到在进行任何更改后能够自动测试项目中所有代码的理论值(value)。我可以看到像RSpec和Mocha这样的测试框架应该如何使设置和运行所述测试变得相当容易