柔性机械臂是一种新型仿生机械臂,其设计受到自然界中生物结构启发,比如象鼻、章鱼爪、蚯蚓和蛇等。与传统机械臂相比,柔性机械臂可以在材料变形范围内进行任意形状的弯曲运动,通过调整自身形态在狭小复杂的空间内工作,有很强的适应能力。
柔性机械臂经常应用于医疗外科手术、空间救援、设备检修等领域。这些场景下对柔性机械臂末端作业精度要求很高,但是大多数研究都集中在了提高末端控制的重复定位精度,忽略了末端轨迹跟踪过程中的控制误差,而且柔性臂动力学模型难以准确的建立。
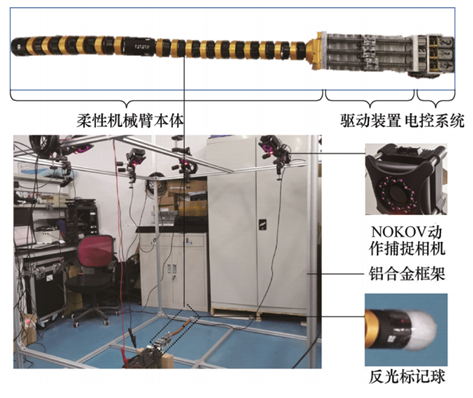
四川大学电气工程学院的研究人员设计了一种刚柔耦合的线驱动柔性机械臂,通过对柔性机械臂运动机理的分析,设计了基于逆动力学模型的柔性机械臂末端定位控制方案,并进行了仿真和实物样机末端定位控制实验。
柔性机械臂实物样机由机械臂本体、驱动装置和电控系统构成,其中驱动装置通过电动机带动滑台移动并牵引驱动线,完成机械臂本体的运动控制。为了准确记录柔性机械臂运动过程中末端位置的变化数据,研究人员在机械臂本体上方布置了NOKOV度量光学动作捕捉系统,并在柔性臂末端放置了一个反光标记球,利用动作捕捉相机来跟踪采集末端位置的实时数据。实验中NOKOV度量动作捕捉系统的定位精度达到亚毫米级。
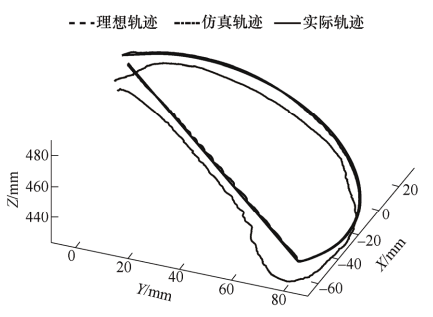
研究人员对比了理想轨迹与仿真轨迹和实际轨迹(NOKOV度量动作捕捉系统采集),并分析了实物样机产生误差的原因。实验结果表明了这种基于逆动力学模型的末端定位控制算法的有效性。
参考文献:[1]马丛俊,赵涛,向国菲,任江涛,陈元科,佃松宜.基于逆运动学的柔性机械臂末端定位控制[J].机械工程学报,2021,57(13):163-171.
大约一年前,我决定确保每个包含非唯一文本的Flash通知都将从模块中的方法中获取文本。我这样做的最初原因是为了避免一遍又一遍地输入相同的字符串。如果我想更改措辞,我可以在一个地方轻松完成,而且一遍又一遍地重复同一件事而出现拼写错误的可能性也会降低。我最终得到的是这样的:moduleMessagesdefformat_error_messages(errors)errors.map{|attribute,message|"Error:#{attribute.to_s.titleize}#{message}."}enddeferror_message_could_not_find(obje
当我在Rails控制台中按向上或向左箭头时,出现此错误:irb(main):001:0>/Users/me/.rvm/gems/ruby-2.0.0-p247/gems/rb-readline-0.4.2/lib/rbreadline.rb:4269:in`blockin_rl_dispatch_subseq':invalidbytesequenceinUTF-8(ArgumentError)我使用rvm来管理我的ruby安装。我正在使用=>ruby-2.0.0-p247[x86_64]我使用bundle来管理我的gem,并且我有rb-readline(0.4.2)(人们推荐的最少
我正在使用Ruby2.1.1和Rails4.1.0.rc1。当执行railsc时,它被锁定了。使用Ctrl-C停止,我得到以下错误日志:~/.rvm/gems/ruby-2.1.1/gems/spring-1.1.2/lib/spring/client/run.rb:47:in`gets':Interruptfrom~/.rvm/gems/ruby-2.1.1/gems/spring-1.1.2/lib/spring/client/run.rb:47:in`verify_server_version'from~/.rvm/gems/ruby-2.1.1/gems/spring-1.1.
我将我的Rails应用程序部署到OpenShift,它运行良好,但我无法在生产服务器上运行“Rails控制台”。它给了我这个错误。我该如何解决这个问题?我尝试更新rubygems,但它也给出了权限被拒绝的错误,我也无法做到。railsc错误:Warning:You'reusingRubygems1.8.24withSpring.UpgradetoatleastRubygems2.1.0andrun`gempristine--all`forbetterstartupperformance./opt/rh/ruby193/root/usr/share/rubygems/rubygems
我已经在Sinatra上创建了应用程序,它代表了一个简单的API。我想在生产和开发上进行部署。我想在部署时选择,是开发还是生产,一些方法的逻辑应该改变,这取决于部署类型。是否有任何想法,如何完成以及解决此问题的一些示例。例子:我有代码get'/api/test'doreturn"Itisdev"end但是在部署到生产环境之后我想在运行/api/test之后看到ItisPROD如何实现? 最佳答案 根据SinatraDocumentation:EnvironmentscanbesetthroughtheRACK_ENVenvironm
当我使用has_one时,它工作得很好,但在has_many上却不行。在这里您可以看到object_id不同,因为它运行了另一个SQL来再次获取它。ruby-1.9.2-p290:001>e=Employee.create(name:'rafael',active:false)ruby-1.9.2-p290:002>b=Badge.create(number:1,employee:e)ruby-1.9.2-p290:003>a=Address.create(street:"123MarketSt",city:"SanDiego",employee:e)ruby-1.9.2-p290
电脑0x0000001A蓝屏错误怎么U盘重装系统教学分享。有用户电脑开机之后遇到了系统蓝屏的情况。系统蓝屏问题很多时候都是系统bug,只有通过重装系统来进行解决。那么蓝屏问题如何通过U盘重装新系统来解决呢?来看看以下的详细操作方法教学吧。 准备工作: 1、U盘一个(尽量使用8G以上的U盘)。 2、一台正常联网可使用的电脑。 3、ghost或ISO系统镜像文件(Win10系统下载_Win10专业版_windows10正式版下载-系统之家)。 4、在本页面下载U盘启动盘制作工具:系统之家U盘启动工具。 U盘启动盘制作步骤: 注意:制作期间,U盘会被格式化,因此U盘中的重要文件请注
在应用开发中,有时候我们需要获取系统的设备信息,用于数据上报和行为分析。那在鸿蒙系统中,我们应该怎么去获取设备的系统信息呢,比如说获取手机的系统版本号、手机的制造商、手机型号等数据。1、获取方式这里分为两种情况,一种是设备信息的获取,一种是系统信息的获取。1.1、获取设备信息获取设备信息,鸿蒙的SDK包为我们提供了DeviceInfo类,通过该类的一些静态方法,可以获取设备信息,DeviceInfo类的包路径为:ohos.system.DeviceInfo.具体的方法如下:ModifierandTypeMethodDescriptionstatic StringgetAbiList()Obt
本文主要介绍在使用Selenium进行自动化测试或者任务时,对于使用了iframe的页面,如何定位iframe中的元素文章目录场景描述解决方案具体代码场景描述当我们在使用Selenium进行自动化测试的时候,可能会遇到一些界面或者窗体是使用HTML的iframe标签进行承载的。对于iframe中的标签,如果直接查找是无法找到的,会抛出没有找到元素的异常。比如近在咫尺的例子就是,CSDN的登录窗体就是使用的iframe,大家可以尝试通过F12开发者模式查看到的tag_name,class_name,id或者xpath来定位中的页面元素,会抛出NoSuchElementException异常。解决
说在前面这部分我本来是合为一篇来写的,因为目的是一样的,都是通过独立按键来控制LED闪灭本质上是起到开关的作用,即调用函数和中断函数。但是写一篇太累了,我还是决定分为两篇写,这篇是调用函数篇。在本篇中你主要看到这些东西!!!1.调用函数的方法(主要讲语法和格式)2.独立按键如何控制LED亮灭3.程序中的一些细节(软件消抖等)1.调用函数的方法思路还是比较清晰地,就是通过按下按键来控制LED闪灭,即每按下一次,LED取反一次。重要的是,把按键与LED联系在一起。我打算用K1来作为开关,看了一下开发板原理图,K1连接的是单片机的P31口,当按下K1时,P31是与GND相连的,也就是说,当我按下去时