 想了解更多关于开源的内容,请访问:51CTO 开源基础软件社区https://ost.51cto.com在OpenHarmony应用开发中选择Native C ++开发方式需要使用OpenHarmony NDK工具,或者想移植一个C/C ++的三方库到OpenHarmony中也可以使用NDK。NDK使用到的编译工具是cmake,也就是CMakeLists.txt那一套。Native C ++应用开发方式可以做直接编译三方库的so库再利用NAPI框架实现能力的调用(只需要在三方库原生的CMakeLists.txt中修改小部分的内容就可以实现)。
想了解更多关于开源的内容,请访问:51CTO 开源基础软件社区https://ost.51cto.com在OpenHarmony应用开发中选择Native C ++开发方式需要使用OpenHarmony NDK工具,或者想移植一个C/C ++的三方库到OpenHarmony中也可以使用NDK。NDK使用到的编译工具是cmake,也就是CMakeLists.txt那一套。Native C ++应用开发方式可以做直接编译三方库的so库再利用NAPI框架实现能力的调用(只需要在三方库原生的CMakeLists.txt中修改小部分的内容就可以实现)。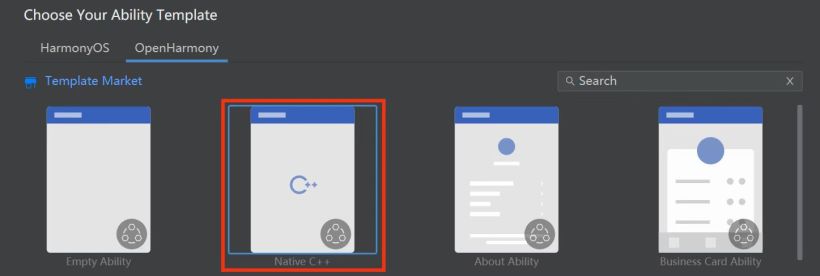
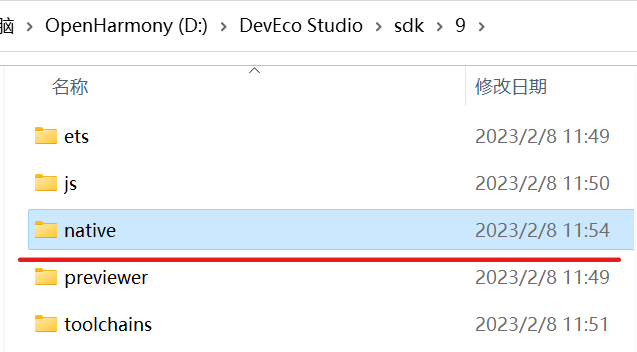
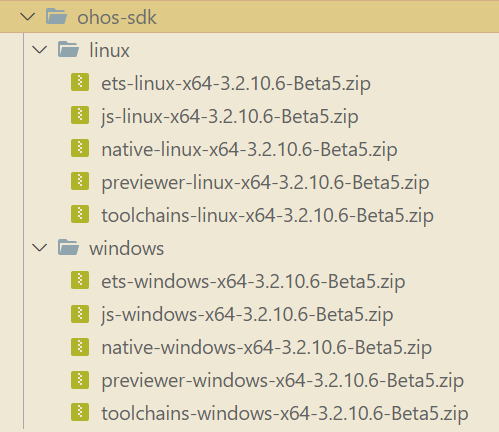
 下载解压后可以得到如下文件,根据linux或者windows端解压不同文件得到sdk。
下载解压后可以得到如下文件,根据linux或者windows端解压不同文件得到sdk。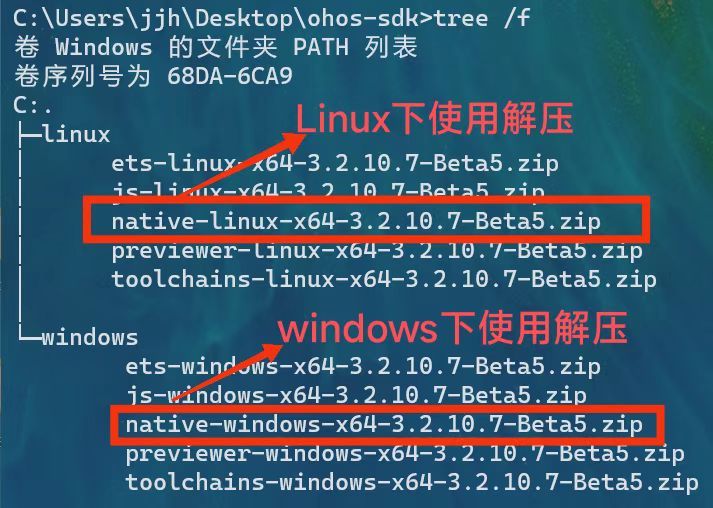
安装依赖
./build/build_scripts/env_setup.sh
执行完上述命令后记得执行source ~/.bashrc或者重启终端
source ~/.bashrc
安装编译SDK需要的依赖包(编译镜像的时候是不依赖这些包的)
sudo apt-get install libxcursor-dev libxrandr-dev libxinerama-dev
./build.sh --product-name ohos-sdk --ccache --build-target ohos_ndk写文章提的issue https://gitee.com/openharmony/build/issues/I6H8IO?from=project-issue
native
├── NOTICE.txt 声明文件
├── build
│ └── cmake
│ ├── ohos.toolchain.cmake ---->编译的工具链
│ └── sdk_native_platforms.cmake ---->编译的工具链(在DevEco Studio中编译打包so要用到)
├── build-tools ---->cmake编译工具所在目录(NDK提供的编译工具)
├── llvm ---->编译器所在目录(NDK提供的编译工具)
├── sysroot ---->编译器的 sysroot 目录,存放 SDK 内部的已经包含的库和对应的头文件
├── ndk_system_capability.json ---->NDK自带so库能力描述文件
├── nativeapi_syscap_config.json ---->调用NDK自带so库能力相关头文件
├── docs ---->调用NDK自带so库能力相关文档
└── oh-uni-package.json ---->SDK 信息描述FileCheck clang-format ld64.lld lldb-vscode llvm-cxxfilt llvm-objdump llvm-strip yaml2obj
clang clang-tidy lld llvm-addr2line llvm-dis llvm-profdata llvm-symbolizer
clang++ clangd lld-link llvm-ar llvm-lib llvm-ranlib not
clang-12 count lldb llvm-as llvm-link llvm-readelf sancov
clang-check dsymutil lldb-argdumper llvm-cfi-verify llvm-modextract llvm-readobj sanstats
clang-cl git-clang-format lldb-mi llvm-config llvm-nm llvm-size scan-build
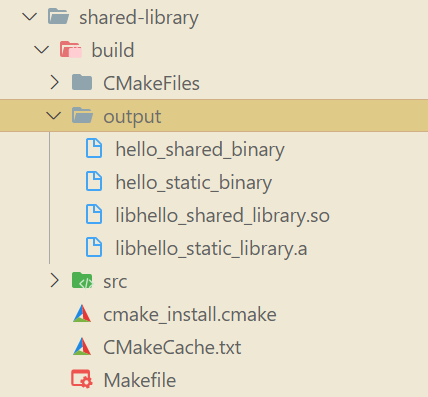
clang-cpp ld.lld lldb-server llvm-cov llvm-objcopy llvm-strings scan-viewshared-library
├── CMakeLists.txt 外部CMakeLists.txt
├── include 头文件目录
│ └── shared
│ └── Hello.h
└── src 源文件目录
├── CMakeLists.txt 内部CMakeLists.txt
├── Hello.cpp
└── main.cpp#cmake的版本
CMAKE_MINIMUM_REQUIRED(VERSION 3.16)
#工程名称
PROJECT(HELLO_LIBRARY)
#添加一个子目录并构建该子目录
ADD_SUBDIRECTORY(src)cmake的内置命令是不区分大小写的,因此add_subdirectory与ADD_SUBDIRECTORY作用一致。但是cmake的所有变量都是区分大小写的
#设置可执行文件输出路径
SET(EXECUTABLE_OUTPUT_PATH ${PROJECT_BINARY_DIR}/output)
# 设置so库文件输出路径
SET(LIBRARY_OUTPUT_PATH ${PROJECT_BINARY_DIR}/output)
############################################################
# Create a library
############################################################
#SHARED表示生成的是动态库,动态库的名字是hello_shared_library。生成动态库的源文件是Hello.cpp
ADD_LIBRARY(hello_shared_library SHARED
Hello.cpp
)
#为生成的动态库添加一个别名,后续hello::library可使用来替代hello_shared_library
ADD_LIBRARY(hello::library ALIAS hello_shared_library)
#为指定目标hello_shared_library添加头文件搜索路径(这个指定目标决不能是alias target,也就是指定的别名hello::library)
TARGET_INCLUDE_DIRECTORIES(hello_shared_library
PUBLIC
${PROJECT_SOURCE_DIR}/include
)
############################################################
# Create an executable
############################################################
# 使用指定的源文件main.cpp创建出一个可执行文件hello_shared_binary
ADD_EXECUTABLE(hello_shared_binary
main.cpp
)
#TARGET_LINK_LIBRARIES指令的作用为将目标文件与库文件进行链接
#将可执行文件hello_shared_binary与库文件hello::library进行链接
TARGET_LINK_LIBRARIES( hello_shared_binary
PRIVATE
hello::library
)#将其临时加入环境变量中(适用于临时想用用NDK)
export PATH=$PATH:/ohos-sdk/linux/native/build-tools/cmake/bin(你自己解压的NDK目录)#将其永远加入环境变量中
#打开.bashrc文件
vim ~/.bashrc
#在文件最后添加cmake路径,该路径是自己的放置文件的路径,之后保存退出
export PATH=/ohos-sdk/linux/native/build-tools/cmake/bin:$PATH
#在命令行执行source ~/.bashrc使环境变量生效
source ~/.bashrccmake -version 可知cmake的版本是3.16.5 ,所以编写CMakeLists.txt可参考的链接为 https://cmake.org/cmake/help/v3.16/guide/tutorial/
可知cmake的版本是3.16.5 ,所以编写CMakeLists.txt可参考的链接为 https://cmake.org/cmake/help/v3.16/guide/tutorial/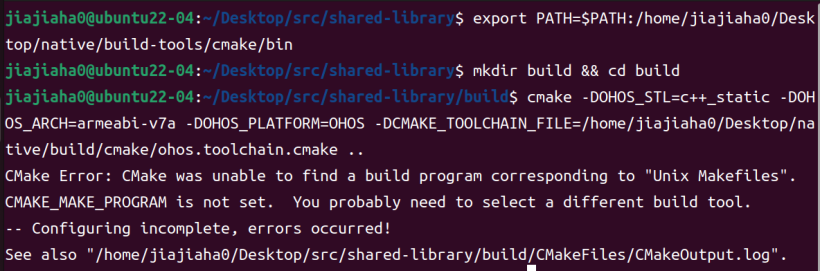
 2、OHOS_ARCH参数(设置应用程序二进制接口ABI),其类型是armeabi-v7a、x86_64 ,默认值是arm64-v8a。每一种ABI定义了相应的二进制文件。
2、OHOS_ARCH参数(设置应用程序二进制接口ABI),其类型是armeabi-v7a、x86_64 ,默认值是arm64-v8a。每一种ABI定义了相应的二进制文件。# Common default settings
39:if(NOT DEFINED OHOS_PLATFORM_LEVEL)
set(OHOS_PLATFORM_LEVEL 1)
endif()
43:if(NOT DEFINED OHOS_TOOLCHAIN)
set(OHOS_TOOLCHAIN clang)
endif()
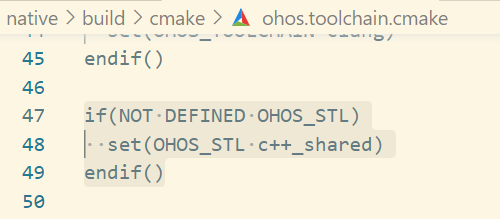
47:if(NOT DEFINED OHOS_STL)
set(OHOS_STL c++_shared)
endif()
51:if(NOT DEFINED OHOS_PIE)
set(OHOS_PIE TRUE)
endif()
55:if(NOT DEFINED OHOS_ARM_NEON)
set(OHOS_ARM_NEON thumb)
endif()
60:if(NOT DEFINED OHOS_ARCH)
set(OHOS_ARCH arm64-v8a)
endif()# dmeo目录下创建build目录,用来放置cmake构建时产生的中间文件。
mkdir build && cd build
# 传递OHOS_STL(可选,默认就是c++_shared)、OHOS_ARCH、OHOS_PLATFORM、工具链文件
# CMAKE_TOOLCHAIN_FILE是ohos.toolchain.cmake具体放置的路径
# 这一步会检查CMakeLists.txt是否有语法错误
# 不要忘记在ohos.toolchain.cmake路径后面加上 ..
cmake -D OHOS_STL=c++_shared -D OHOS_ARCH=armeabi-v7a -D OHOS_PLATFORM=OHOS -D CMAKE_TOOLCHAIN_FILE=/xxx/build/cmake/ohos.toolchain.cmake ..
cmake --build .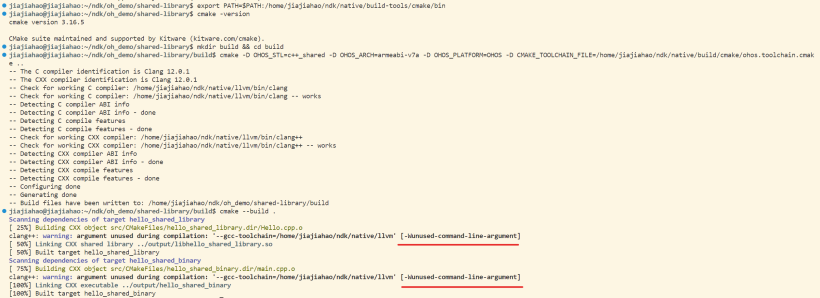 2、可以注意到执行cmake --build .时会有warning: -Wunused-command-line-argument,通过在内部的CMakeLists.txt中添加如下语句消除warning。
2、可以注意到执行cmake --build .时会有warning: -Wunused-command-line-argument,通过在内部的CMakeLists.txt中添加如下语句消除warning。set(CMAKE_CXX_FLAGS "-Wno-unused-command-line-argument")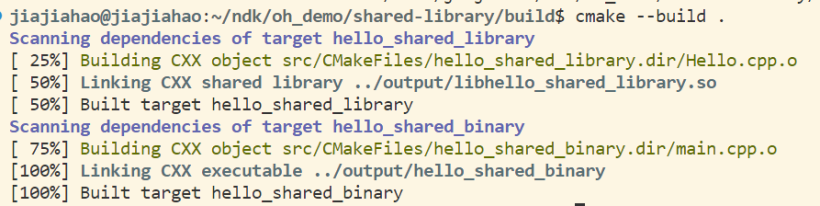
 4、要编译静态库及其可执行文件,内部的CMakeLists.txt中添加如下语句
4、要编译静态库及其可执行文件,内部的CMakeLists.txt中添加如下语句############################################################
# Create a library
############################################################
#Generate the static library from the library sources
ADD_LIBRARY(hello_static_library STATIC
Hello.cpp
)
TARGET_INCLUDE_DIRECTORIES(hello_static_library
PUBLIC
${PROJECT_SOURCE_DIR}/include
)
############################################################
# Create an executable
############################################################
# Add an executable with the above sources
ADD_EXECUTABLE(hello_static_binary
main.cpp
)
# link the new hello_library target with the hello_binary target
TARGET_LINK_LIBRARIES( hello_static_binary
PRIVATE
hello_static_library
) 5、编译64位的库文件和可执行文件,OHOS_ARCH参数选择arm64-v8a或者编译时不传递该参数。
5、编译64位的库文件和可执行文件,OHOS_ARCH参数选择arm64-v8a或者编译时不传递该参数。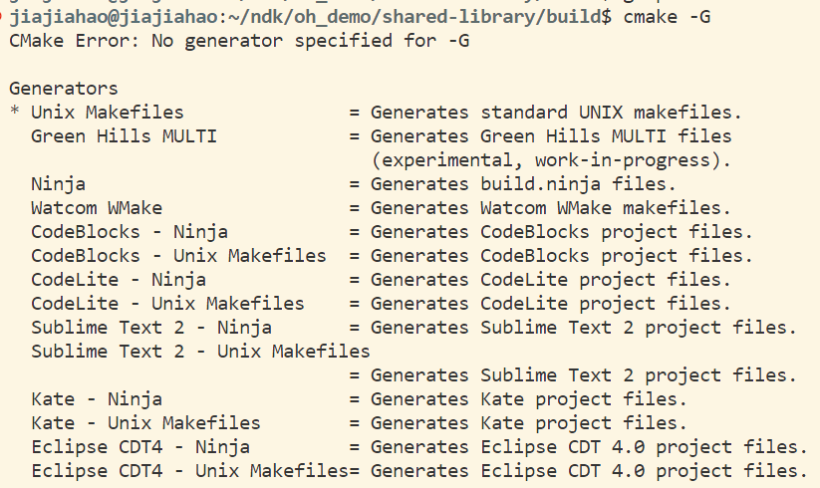 2、使用CMake进行构建时添加上-G “Ninja”。
2、使用CMake进行构建时添加上-G “Ninja”。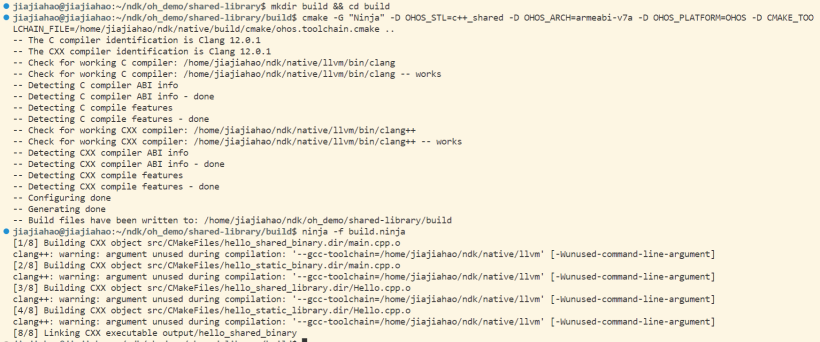
第一步:mkdir build && cd build
第二步:cmake -G "Ninja" -D OHOS_STL=c++_shared -D OHOS_ARCH=armeabi-v7a -D OHOS_PLATFORM=OHOS -D CMAKE_TOOLCHAIN_FILE=/xxx/build/cmake/ohos.toolchain.cmake ..
第三步:cmake --build .或者ninja -f build.ninja# 将libhello_shared_library.so动态库的编译流程转为dot
ninja -t graph libhello_shared_library.so > xxx.dot
# 将dot格式转化为png格式的流程图
dot -T png xxx.dot -o libhello_shared_library.so.png
# 将dot格式转化为svg格式的流程图
dot -T svg xxx.dot -o libhello_shared_library.so.svg 如果生成图片格式太小的话,可以生成svg格式到浏览器打开,这一点很重要,请参考该 issue。
如果生成图片格式太小的话,可以生成svg格式到浏览器打开,这一点很重要,请参考该 issue。 2、首先点击Where is source code行的Browser Source,加载工程所在目录。再点击Where to build the binarys行的Browser Source,加载点击“Where is source code”行的Browser Source,加载源码所在目录。点击“Where to build the binarys行的Browser Source,加载工程所在目录下的build目录(没有就创建一个)。3、点击Add Entry传入cmake 参数。勾选把旁边的Grouped选项。
2、首先点击Where is source code行的Browser Source,加载工程所在目录。再点击Where to build the binarys行的Browser Source,加载点击“Where is source code”行的Browser Source,加载源码所在目录。点击“Where to build the binarys行的Browser Source,加载工程所在目录下的build目录(没有就创建一个)。3、点击Add Entry传入cmake 参数。勾选把旁边的Grouped选项。 4、点击Configure选择Current Generator生成器为Unix Makefiles。5、最后打开Where to build the binarys加载构建目录终端,执行make -j 8命令。
4、点击Configure选择Current Generator生成器为Unix Makefiles。5、最后打开Where to build the binarys加载构建目录终端,执行make -j 8命令。make -j n含义是 让make最多允许n个编译命令同时执行,这样可以更有效的利用CPU资源。假设系统cpu是12核,在不影响其他工作的情况下,我们可以make -j 12将cpu资源充分利用起来,一般来说,最大并行任务数为cpu_num * 2。
 想了解更多关于开源的内容,请访问:51CTO 开源基础软件社区https://ost.51cto.com
想了解更多关于开源的内容,请访问:51CTO 开源基础软件社区https://ost.51cto.com 无论您是想搭建桌面端、WEB端或者移动端APP应用,HOOPSPlatform组件都可以为您提供弹性的3D集成架构,同时,由工业领域3D技术专家组成的HOOPS技术团队也能为您提供技术支持服务。如果您的客户期望有一种在多个平台(桌面/WEB/APP,而且某些客户端是“瘦”客户端)快速、方便地将数据接入到3D应用系统的解决方案,并且当访问数据时,在各个平台上的性能和用户体验保持一致,HOOPSPlatform将帮助您完成。利用HOOPSPlatform,您可以开发在任何环境下的3D基础应用架构。HOOPSPlatform可以帮您打造3D创新型产品,HOOPSSDK包含的技术有:快速且准确的CAD
C#实现简易绘图工具一.引言实验目的:通过制作窗体应用程序(C#画图软件),熟悉基本的窗体设计过程以及控件设计,事件处理等,熟悉使用C#的winform窗体进行绘图的基本步骤,对于面向对象编程有更加深刻的体会.Tutorial任务设计一个具有基本功能的画图软件**·包括简单的新建文件,保存,重新绘图等功能**·实现一些基本图形的绘制,包括铅笔和基本形状等,学习橡皮工具的创建**·设计一个合理舒适的UI界面**注明:你可能需要先了解一些关于winform窗体应用程序绘图的基本知识,以及关于GDI+类和结构的知识二.实验环境Windows系统下的visualstudio2017C#窗体应用程序三.
1.postman介绍Postman一款非常流行的API调试工具。其实,开发人员用的更多。因为测试人员做接口测试会有更多选择,例如Jmeter、soapUI等。不过,对于开发过程中去调试接口,Postman确实足够的简单方便,而且功能强大。2.下载安装官网地址:https://www.postman.com/下载完成后双击安装吧,安装过程极其简单,无需任何操作3.使用教程这里以百度为例,工具使用简单,填写URL地址即可发送请求,在下方查看响应结果和响应状态码常用方法都有支持请求方法:getpostputdeleteGet、Post、Put与Delete的作用get:请求方法一般是用于数据查询,
我最喜欢的Google文档功能之一是它会在我工作时不断自动保存我的文档版本。这意味着即使我在进行关键更改之前忘记在某个点进行保存,也很有可能会自动创建一个保存点。至少,我可以将文档恢复到错误更改之前的状态,并从该点继续工作。对于在MacOS(或UNIX)上运行的Ruby编码器,是否有具有等效功能的工具?例如,一个工具会每隔几分钟自动将Gitcheckin我的本地存储库以获取我正在处理的文件。也许我有点偏执,但这点小保险可以让我在日常工作中安心。 最佳答案 虚拟机有些人可能讨厌我对此的回应,但我在编码时经常使用VIM,它具有自动保存功
我正在尝试上传文件。一个简单的hello.txt。我正在关注文档,但无法将其上传到我的存储桶。#STARTAWSCLIENTs3=Aws::S3::Resource.newbucket=s3.bucket(BUCKET_NAME)begins3.buckets[BUCKET_NAME].objects[KEY].write(:file=>FILE_NAME)puts"Uploadingfile#{FILE_NAME}tobucket#{BUCKET_NAME}."bucket.objects.eachdo|obj|puts"#{obj.key}=>#{obj.etag}"endresc
我有一个Highstock图表(带有标记和阴影的线条),并且想以编程方式显示一个highstock工具提示,例如,当我选择某个表上的一行(包含图表数据)我想显示相应的highstock工具提示。这可能吗? 最佳答案 股票图表thissolution不起作用:在thisexample你必须更换这个:chart.tooltip.refresh(chart.series[0].data[i]);为此:chart.tooltip.refresh([chart.series[0].points[i]]);解决方案可用here.
前面一篇关于智能合约翻译文讲到了,是一种计算机程序,既然是程序,那就可以使用程序语言去编写智能合约了。而若想玩区块链上的项目,大部分区块链项目都是开源的,能看得懂智能合约代码,或找出其中的漏洞,那么,学习Solidity这门高级的智能合约语言是有必要的,当然,这都得在公链``````以太坊上,毕竟国内的联盟链有些是不兼容Solidity。Solidity是一种面向对象的高级语言,用于实现智能合约。智能合约是管理以太坊状态下的账户行为的程序。Solidity是运行在以太坊(Ethereum)虚拟机(EVM)上,其语法受到了c++、python、javascript影响。Solidity是静态类型
一、机器人介绍 此处是基于MATLABRVC工具箱,对ABB-IRB-1200型号的微型机械臂进行正逆向运动学分析,并利Simulink工具实现对机械臂进行具有动力学参数的末端轨迹规划仿真,最后根据机械模型设计Simulink-Adams联合仿真。 图1.ABBIRB 1200尺寸参数示意图ABBIRB 1200提供的两种型号广泛适用于各作业,且两者间零部件通用,两种型号的工作范围分别为700 mm 和 900 mm,大有效负载分别为 7 kg 和5 kg。 IRB 1200 能够在狭小空间内能发挥其工作范围与性能优势,具有全新的设计、小型化的体积、高效的性能、易于集成、便捷的接
2022年底,OpenAI的预训练模型ChatGPT给人工智能领域的爱好者和研究人员留下了深刻的印象和启发,他展现的惊人能力将人工智能的研究和应用热度推向高潮,网上也充斥着和ChatGPT的各种聊天,他可以作诗、写小说、写代码、讨论疫情问题等。下面就是一些他的神回复:人命关天的坑: 写歌,留给词作者的机会不多了。。。 回答人类怎么样面对人工智能: 什么是ChatGPT?借用网上的一段介绍,ChatGPT是由人工智能研究实验室OpenAI在2022年11月30日发布的全新聊天机器人模型,一款人工智能技术驱动的自然语言处理工具。它能够通过学习和理解人类的语言来进行对话,还能根据聊天的上下文进行互动
我是syslog的新手。我们决定使用系统日志来跟踪Rails应用程序中的一些特殊事件。问题是我不想使用默认的/var/log/system.log文件,而是使用自定义文件,例如/var/log/myapp_events.log.我看到我必须像这样在/etc/syslog.conf中定义我自己的设施:myapp_events.*/var/log/myapp_events.log重新启动syslogd后,我发现我可以直接在bash控制台中使用它:syslog-s-kFacilitymyapp_eventsMessage"thisismymessage"该消息按预期出现在/var/log/m