定时器是一个功能强大的外设。
比如高级定时器0,最大是108M,108M/65536/65536=39.76823……(最大定时时间)
如果你觉得时间不够,还可以使用定时器级联功能,三个定时器级联,就可以定时34万亿年。
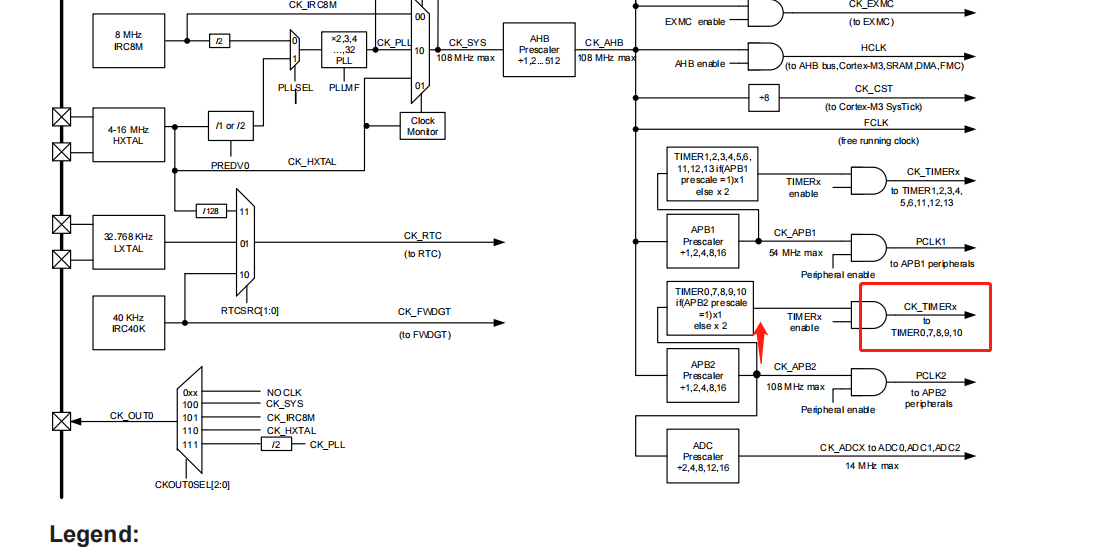
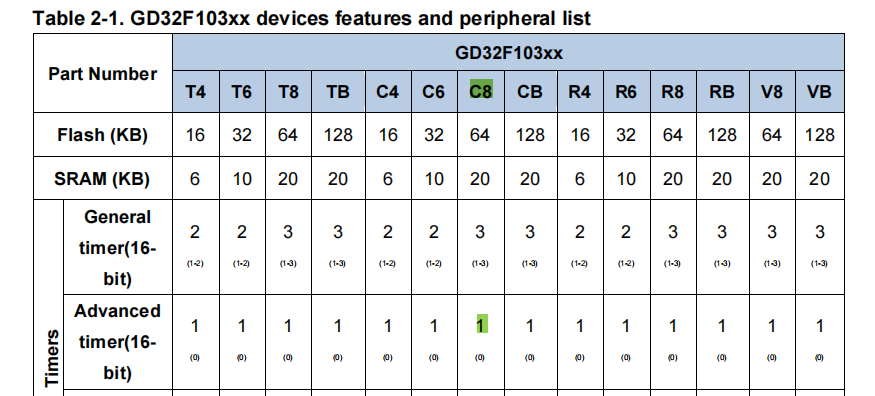
GD32F103只有三个定时器,一个高级Timer0,两个通用Timer1、2

向上,向下,中央对齐。
其中中央对齐可以用在SVPWM控制算法中,产生三角载波。
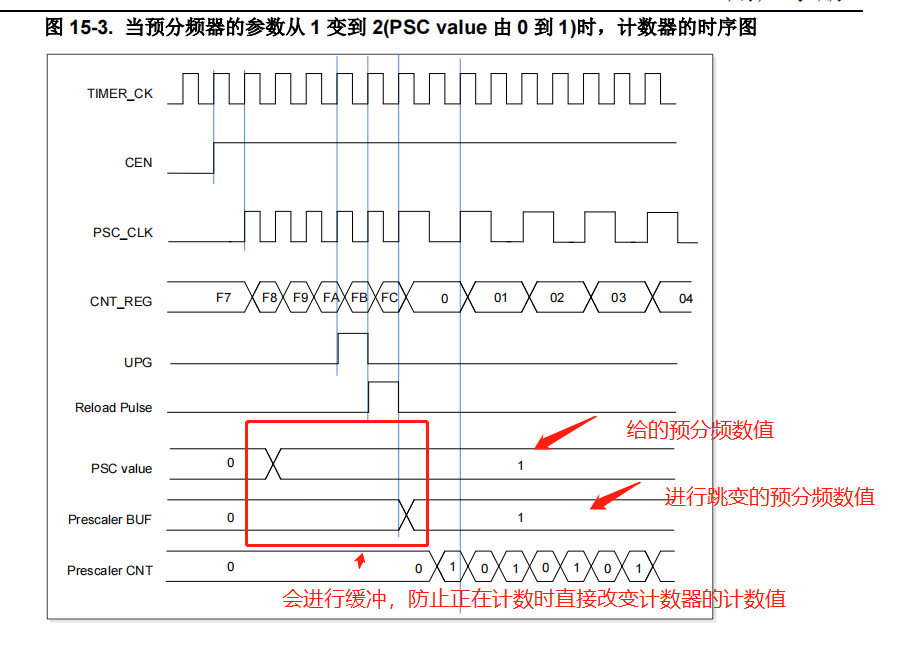
预分频寄存器与自动重载寄存器都是有影子寄存器的,只有在下一个周期你更改后的值才会生效。

不知道结构体这里为什么会报错?
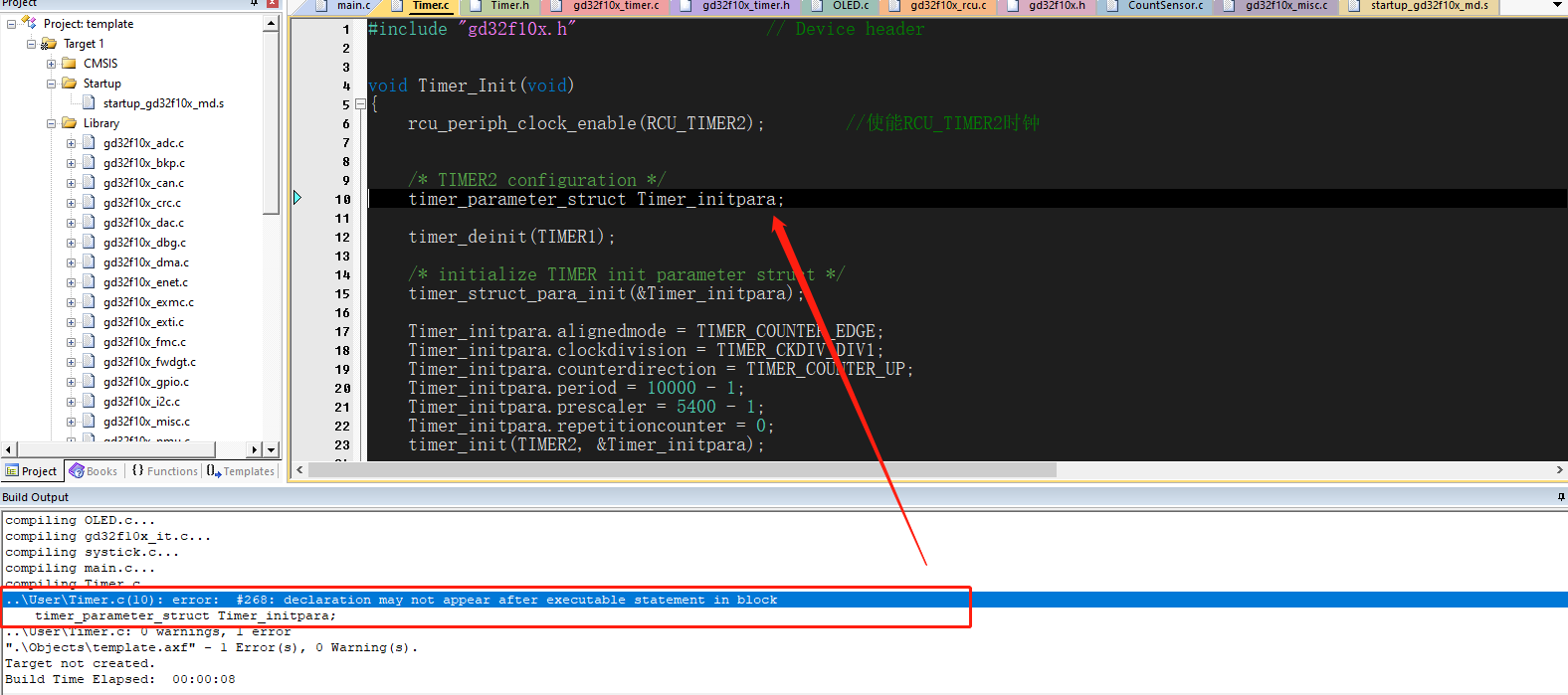
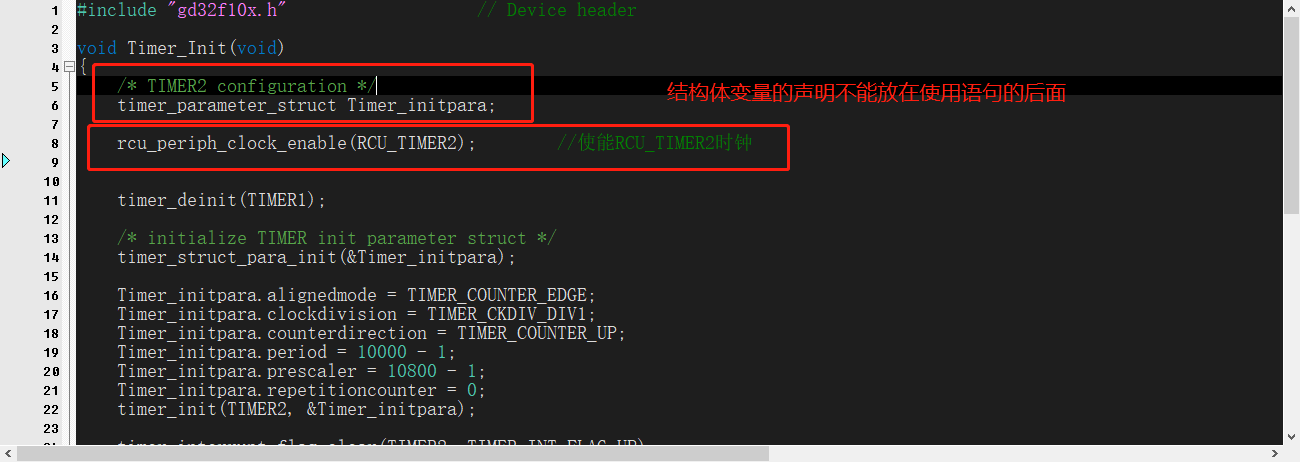
解决办法
#include "gd32f10x.h" // Device header
void Timer_Init(void)
{
/* TIMER2 configuration */
timer_parameter_struct Timer_initpara;
rcu_periph_clock_enable(RCU_TIMER2); //使能RCU_TIMER2时钟
timer_deinit(TIMER1);
/* initialize TIMER init parameter struct */
timer_struct_para_init(&Timer_initpara);
Timer_initpara.alignedmode = TIMER_COUNTER_EDGE;
Timer_initpara.clockdivision = TIMER_CKDIV_DIV1;
Timer_initpara.counterdirection = TIMER_COUNTER_UP;
Timer_initpara.period = 10000 - 1;
Timer_initpara.prescaler = 10800 - 1;
Timer_initpara.repetitioncounter = 0;
timer_init(TIMER2, &Timer_initpara);
//手动把更新中断标志位清除一下,避免刚初始化完成就进入中断
timer_interrupt_flag_clear(TIMER2, TIMER_INT_FLAG_UP);
/* TIMER2 channel control update interrupt enable */
timer_interrupt_enable(TIMER2, TIMER_INT_UP);
timer_enable(TIMER2);
/* enable and set key EXTI interrupt to the specified priority */
nvic_priority_group_set(NVIC_PRIGROUP_PRE2_SUB2);
nvic_irq_enable(TIMER2_IRQn, 1U, 1U);
}
//void TIMER2_IRQHandler(void)
//{
// if (timer_interrupt_flag_get(TIMER2, TIMER_INT_FLAG_UP) == SET)
// {
//
// timer_interrupt_flag_clear(TIMER2, TIMER_INT_FLAG_UP);
// }
//}
#include "gd32f10x.h"
#include "gd32f10x_libopt.h"
#include "systick.h"
#include "OLED.h"
#include "Timer.h"
uint16_t Num;
int main(void)
{
OLED_Init();
Timer_Init();
OLED_ShowString(1, 1, "Num:");
while (1)
{
OLED_ShowNum(1, 5, Num, 5);
OLED_ShowNum(2, 5, timer_counter_read(TIMER2), 5);
OLED_ShowNum(3, 5, timer_prescaler_read(TIMER2), 5);
}
}
void TIMER2_IRQHandler(void)
{
if (timer_interrupt_flag_get(TIMER2, TIMER_INT_FLAG_UP) == SET)
{
Num++;
timer_interrupt_flag_clear(TIMER2, TIMER_INT_FLAG_UP);
}
}外部时钟,配置输入捕获功能IC
#include "gd32f10x.h" // Device header
void Timer_Init(void)
{
/* TIMER1 configuration */
timer_parameter_struct Timer_initpara;
timer_ic_parameter_struct timer_icinitpara;
rcu_periph_clock_enable(RCU_TIMER1); //使能RCU_TIMER1时钟
rcu_periph_clock_enable(RCU_GPIOA);
rcu_periph_clock_enable(RCU_AF);
gpio_init(GPIOA, GPIO_MODE_IPU, GPIO_OSPEED_50MHZ, GPIO_PIN_0);
timer_deinit(TIMER1);
/* initialize TIMER init parameter struct */
timer_struct_para_init(&Timer_initpara);
Timer_initpara.alignedmode = TIMER_COUNTER_EDGE;
Timer_initpara.clockdivision = TIMER_CKDIV_DIV1;
Timer_initpara.counterdirection = TIMER_COUNTER_UP;
Timer_initpara.period = 10 - 1;
Timer_initpara.prescaler = 1 - 1;
Timer_initpara.repetitioncounter = 0;
timer_init(TIMER1, &Timer_initpara);
/* TIMER1 CH0 input capture configuration */
timer_icinitpara.icpolarity = TIMER_IC_POLARITY_FALLING;
timer_icinitpara.icselection = TIMER_IC_SELECTION_DIRECTTI;
timer_icinitpara.icprescaler = TIMER_IC_PSC_DIV1;
timer_icinitpara.icfilter = 0x00;
timer_input_capture_config(TIMER1, TIMER_CH_0, &timer_icinitpara);
/* slave mode selection : TIMER1 */
/* TIMER1 input trigger : external trigger connected to CI0 */
timer_input_trigger_source_select(TIMER1,TIMER_SMCFG_TRGSEL_CI0FE0);
timer_slave_mode_select(TIMER1,TIMER_SLAVE_MODE_EXTERNAL0);
//手动把更新中断标志位清除一下,避免刚初始化完成就进入中断
timer_interrupt_flag_clear(TIMER1, TIMER_INT_FLAG_UP);
/* TIMER2 channel control update interrupt enable */
timer_interrupt_enable(TIMER1, TIMER_INT_UP);
timer_enable(TIMER1);
/* enable and set key EXTI interrupt to the specified priority */
nvic_priority_group_set(NVIC_PRIGROUP_PRE2_SUB2);
nvic_irq_enable(TIMER1_IRQn, 1U, 1U);
}
//void TIMER2_IRQHandler(void)
//{
// if (timer_interrupt_flag_get(TIMER2, TIMER_INT_FLAG_UP) == SET)
// {
//
// timer_interrupt_flag_clear(TIMER2, TIMER_INT_FLAG_UP);
// }
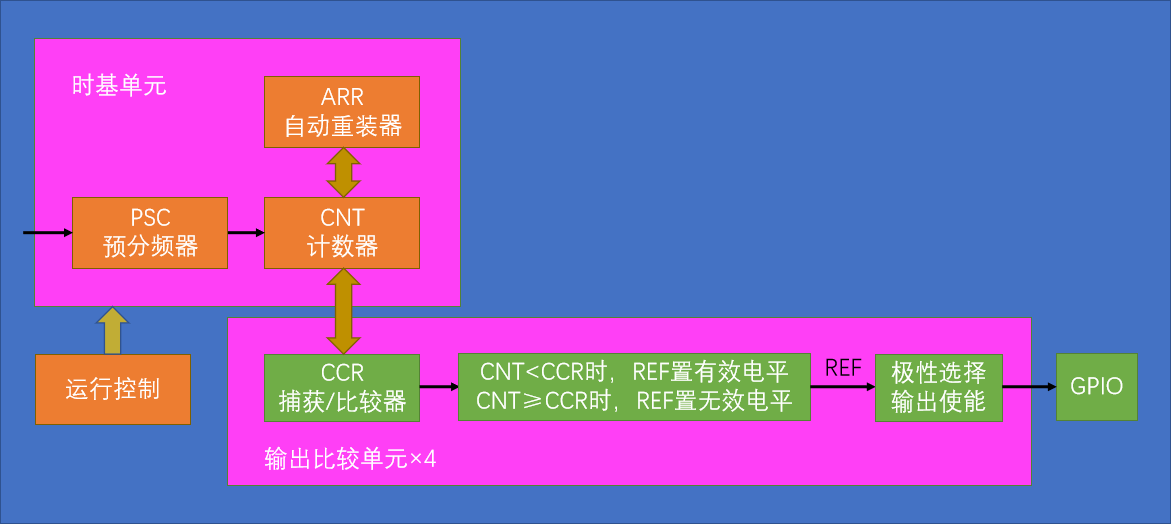
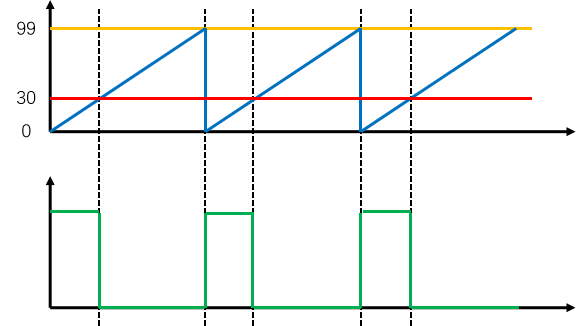
//}输出比较可以通过比较CNT与CCR寄存器值的关系,来对输出电平进行置1、置0或翻转的操作,用于输出一定频率和占空比的PWM波形。
每个高级定时器和通用定时器都拥有4个输出比较通道。
高级定时器的前3个通道额外拥有死区生成和互补输出的功能。
死区时间的插入,确保了通道互补的两路信号不会同时有效。

#include "gd32f10x.h" // Device header
void PWM_Init(void)
{
//输出比较与定时器初始化结构体
timer_oc_parameter_struct timer_ocintpara;
timer_parameter_struct timer_initpara;
//时钟 TIMER1 GPIOA
rcu_periph_clock_enable(RCU_TIMER1);
rcu_periph_clock_enable(RCU_GPIOA);
rcu_periph_clock_enable(RCU_AF);
//PA1初始化 复用推挽输出
gpio_init(GPIOA, GPIO_MODE_AF_PP, GPIO_OSPEED_50MHZ, GPIO_PIN_1);
timer_deinit(TIMER1);
/* TIMER1 参数配置 */
timer_initpara.prescaler = 10800 - 1; //PSC
timer_initpara.alignedmode = TIMER_COUNTER_EDGE;
timer_initpara.counterdirection = TIMER_COUNTER_UP;
timer_initpara.period = 100 - 1; //ARR
timer_initpara.clockdivision = TIMER_CKDIV_DIV1;
timer_initpara.repetitioncounter = 0;
timer_init(TIMER1,&timer_initpara);
//输出比较参数配置
timer_ocintpara.ocpolarity = TIMER_OC_POLARITY_HIGH;//高极性,不反转,REF直接输出
timer_ocintpara.outputstate = TIMER_CCX_ENABLE;//输出使能
timer_channel_output_config(TIMER1,TIMER_CH_1,&timer_ocintpara);
/* CH1 configuration in PWM mode1,duty cycle 0% */
timer_channel_output_pulse_value_config(TIMER1,TIMER_CH_1,0);//CCR 占空比
timer_channel_output_mode_config(TIMER1,TIMER_CH_1,TIMER_OC_MODE_PWM0);//PWM模式0 模式1
timer_channel_output_shadow_config(TIMER1,TIMER_CH_1,TIMER_OC_SHADOW_DISABLE);
/* auto-reload preload enable */
timer_auto_reload_shadow_enable(TIMER1);
/* auto-reload preload enable */
timer_enable(TIMER1);
}
void PWM_SetCompare1(uint16_t Compare)
{
timer_channel_output_pulse_value_config(TIMER1,TIMER_CH_1,Compare);
}
#include "gd32f10x.h"
#include "gd32f10x_libopt.h"
#include "systick.h"
#include "OLED.h"
#include "Timer.h"
#include "PWM.h"
uint8_t i;
int main(void)
{
OLED_Init();
PWM_Init();
OLED_ShowString(1, 1, "Duty: %");
while (1)
{
for (i = 0; i <= 100; i++)
{
PWM_SetCompare1(i);
Delay_ms(10);
OLED_ShowNum(1, 6, i, 3);
}
for (i = 0; i <= 100; i++)
{
PWM_SetCompare1(100 - i);
Delay_ms(10);
OLED_ShowNum(1, 6, i, 3);
}
}
}1.高级定时器只有 TIMER0 四通道定时器
通过配置互补通道PB13 PA8
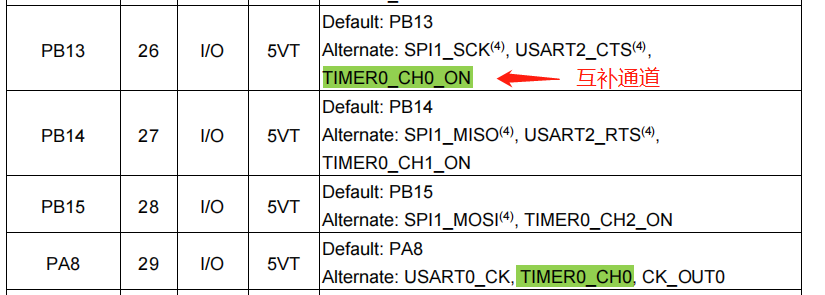
配置刹车PB12

#include "gd32f10x.h" // Device header
void PWM_Init(void)
{
//输出比较与定时器初始化结构体 刹车结构体
timer_oc_parameter_struct timer_ocintpara;
timer_parameter_struct timer_initpara;
timer_break_parameter_struct timer_breakpara;
//时钟 TIMER0 GPIOA GPIOB
rcu_periph_clock_enable(RCU_TIMER0);
rcu_periph_clock_enable(RCU_GPIOA);
rcu_periph_clock_enable(RCU_GPIOB);
rcu_periph_clock_enable(RCU_AF);
//PA1初始化 复用推挽输出
gpio_init(GPIOA, GPIO_MODE_AF_PP, GPIO_OSPEED_50MHZ, GPIO_PIN_8);
//PB13 互补通道初始化 复用推挽输出
gpio_init(GPIOB, GPIO_MODE_AF_PP, GPIO_OSPEED_50MHZ, GPIO_PIN_13);
/* configure PB12(TIMER0 BKIN) as alternate function */
gpio_init(GPIOB, GPIO_MODE_IN_FLOATING, GPIO_OSPEED_50MHZ, GPIO_PIN_12);
timer_deinit(TIMER0);
/* TIMER0 参数配置 */
timer_initpara.prescaler = 108 - 1; //PSC
timer_initpara.alignedmode = TIMER_COUNTER_EDGE;
timer_initpara.counterdirection = TIMER_COUNTER_UP;
timer_initpara.period = 600 - 1; //ARR
timer_initpara.clockdivision = TIMER_CKDIV_DIV1;
timer_initpara.repetitioncounter = 0;
timer_init(TIMER0,&timer_initpara);
//输出比较参数配置
timer_ocintpara.outputstate = TIMER_CCX_ENABLE;//输出使能
timer_ocintpara.outputnstate = TIMER_CCXN_ENABLE;//互补输出使能
timer_ocintpara.ocpolarity = TIMER_OC_POLARITY_HIGH;//高极性,不反转,REF直接输出
timer_ocintpara.ocnpolarity = TIMER_OCN_POLARITY_HIGH;
timer_ocintpara.ocidlestate = TIMER_OC_IDLE_STATE_HIGH;
timer_ocintpara.ocnidlestate = TIMER_OCN_IDLE_STATE_HIGH;
//通道选择
timer_channel_output_config(TIMER0,TIMER_CH_0,&timer_ocintpara);
/* CH0 configuration in PWM mode1,duty cycle 0% */
timer_channel_output_pulse_value_config(TIMER0,TIMER_CH_0,0);//CCR 占空比
timer_channel_output_mode_config(TIMER0,TIMER_CH_0,TIMER_OC_MODE_PWM0);//PWM模式0 模式1
timer_channel_output_shadow_config(TIMER0,TIMER_CH_0,TIMER_OC_SHADOW_ENABLE);
/* automatic output enable, break, dead time and lock configuration*/
timer_breakpara.runoffstate = TIMER_ROS_STATE_ENABLE;
timer_breakpara.ideloffstate = TIMER_IOS_STATE_ENABLE ;
timer_breakpara.deadtime = 164;
timer_breakpara.breakpolarity = TIMER_BREAK_POLARITY_LOW;
timer_breakpara.outputautostate = TIMER_OUTAUTO_ENABLE;
timer_breakpara.protectmode = TIMER_CCHP_PROT_OFF;
timer_breakpara.breakstate = TIMER_BREAK_ENABLE;
timer_break_config(TIMER0,&timer_breakpara);
/* auto-reload preload enable */
// timer_auto_reload_shadow_enable(TIMER0);
/* TIMER0 primary output function enable */
timer_primary_output_config(TIMER0,ENABLE);
/* TIMER0 channel control update interrupt enable */
timer_interrupt_enable(TIMER0,TIMER_INT_CMT);
/* TIMER0 break interrupt disable */
timer_interrupt_disable(TIMER0,TIMER_INT_BRK);
nvic_priority_group_set(NVIC_PRIGROUP_PRE1_SUB3);
nvic_irq_enable(TIMER0_TRG_CMT_IRQn, 0, 1);
/* TIMER0 counter enable */
timer_enable(TIMER0);
}
void PWM_SetCompare1(uint16_t Compare)
{
timer_channel_output_pulse_value_config(TIMER0,TIMER_CH_0,Compare);
}互补输出:
死区时间:
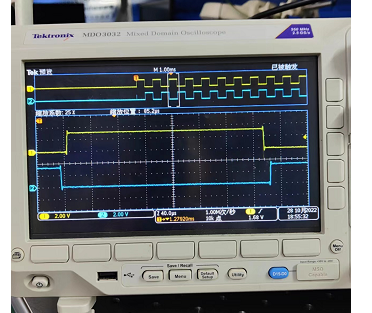
刹车功能
假设我做了一个模块如下:m=Module.newdoclassCendend三个问题:除了对m的引用之外,还有什么方法可以访问C和m中的其他内容?我可以在创建匿名模块后为其命名吗(就像我输入“module...”一样)?如何在使用完匿名模块后将其删除,使其定义的常量不再存在? 最佳答案 三个答案:是的,使用ObjectSpace.此代码使c引用你的类(class)C不引用m:c=nilObjectSpace.each_object{|obj|c=objif(Class===objandobj.name=~/::C$/)}当然这取决于
作为我的Rails应用程序的一部分,我编写了一个小导入程序,它从我们的LDAP系统中吸取数据并将其塞入一个用户表中。不幸的是,与LDAP相关的代码在遍历我们的32K用户时泄漏了大量内存,我一直无法弄清楚如何解决这个问题。这个问题似乎在某种程度上与LDAP库有关,因为当我删除对LDAP内容的调用时,内存使用情况会很好地稳定下来。此外,不断增加的对象是Net::BER::BerIdentifiedString和Net::BER::BerIdentifiedArray,它们都是LDAP库的一部分。当我运行导入时,内存使用量最终达到超过1GB的峰值。如果问题存在,我需要找到一些方法来更正我的代
我有一个包含模块的模型。我想在模块中覆盖模型的访问器方法。例如:classBlah这显然行不通。有什么想法可以实现吗? 最佳答案 您的代码看起来是正确的。我们正在毫无困难地使用这个确切的模式。如果我没记错的话,Rails使用#method_missing作为属性setter,因此您的模块将优先,阻止ActiveRecord的setter。如果您正在使用ActiveSupport::Concern(参见thisblogpost),那么您的实例方法需要进入一个特殊的模块:classBlah
我刚刚被困在这个问题上一段时间了。以这个基地为例:moduleTopclassTestendmoduleFooendend稍后,我可以通过这样做在Foo中定义扩展Test的类:moduleTopmoduleFooclassSomeTest但是,如果我尝试通过使用::指定模块来最小化缩进:moduleTop::FooclassFailure这失败了:NameError:uninitializedconstantTop::Foo::Test这是一个错误,还是仅仅是Ruby解析变量名的方式的逻辑结果? 最佳答案 Isthisabug,or
我想获取模块中定义的所有常量的值:moduleLettersA='apple'.freezeB='boy'.freezeendconstants给了我常量的名字:Letters.constants(false)#=>[:A,:B]如何获取它们的值的数组,即["apple","boy"]? 最佳答案 为了做到这一点,请使用mapLetters.constants(false).map&Letters.method(:const_get)这将返回["a","b"]第二种方式:Letters.constants(false).map{|c
我的假设是moduleAmoduleBendend和moduleA::Bend是一样的。我能够从thisblog找到解决方案,thisSOthread和andthisSOthread.为什么以及什么时候应该更喜欢紧凑语法A::B而不是另一个,因为它显然有一个缺点?我有一种直觉,它可能与性能有关,因为在更多命名空间中查找常量需要更多计算。但是我无法通过对普通类进行基准测试来验证这一点。 最佳答案 这两种写作方法经常被混淆。首先要说的是,据我所知,没有可衡量的性能差异。(在下面的书面示例中不断查找)最明显的区别,可能也是最著名的,是你的
我一直致力于让我们的Rails2.3.8应用程序在JRuby下正确运行。一切正常,直到我启用config.threadsafe!以实现JRuby提供的并发性。这导致lib/中的模块和类不再自动加载。使用config.threadsafe!启用:$rubyscript/runner-eproduction'pSim::Sim200Provisioner'/Users/amchale/.rvm/gems/jruby-1.5.1@web-services/gems/activesupport-2.3.8/lib/active_support/dependencies.rb:105:in`co
文章目录1.开发板选择*用到的资源2.串口通信(个人理解)3.代码分析(注释比较详细)1.主函数2.串口1配置3.串口2配置以及中断函数4.注意问题5.源码链接1.开发板选择我用的是STM32F103RCT6的板子,不过代码大概在F103系列的板子上都可以运行,我试过在野火103的霸道板上也可以,主要看一下串口对应的引脚一不一样就行了,不一样的就更改一下。*用到的资源keil5软件这里用到了两个串口资源,采集数据一个,串口通信一个,板子对应引脚如下:串口1,TX:PA9,RX:PA10串口2,TX:PA2,RX:PA32.串口通信(个人理解)我就从串口采集传感器数据这个过程说一下我自己的理解,
我有一个Controller,我想为这个Controller创建一个助手,我可以在不包含它的情况下使用它。我尝试像这样创建一个与Controller同名的助手classCars::EnginesController我创建的助手是moduleCars::EnginesHelperdefcheck_fuellogger.debug("chekingfuel")endend我得到的错误是undefinedlocalvariableormethod`check_fuel'for#有没有我遗漏的约定? 最佳答案 如果你真的想在Controll
我有一个模块stat存在于目录结构中:lib/stat_creator/stat/在lib/stat_creator/stat.rb中,我在lib/stat_creator/stat/目录中有我需要的文件,以及:moduleStatCreatormoduleStatendend当我使用该模块时,我将这些类称为StatCreator::Stat::Foo.new现在我想要一个存在于应用程序中的根Stat类。我在app/models中制作了我的Stat类,并在routes.rb中进行了设置。但是,如果我转到Rails控制台并尝试在应用程序/模型中使用Stat类,例如:Stat.by_use