遥感高光谱图像因其高光谱分辨率的特点,并借助深度学习等算法,可以实现地物的精细分类、目标探测和识别,在智慧农业、矿产勘查、城市规划等领域得到了广泛应用。但是高光谱数据集的标注比较困难,目前常用的数据集有限。因此本文总结了现有的高光谱图像分类经典数据集,并提供简要介绍和下载链接。
目录
Indian Pines是于1992年6月份在美国印第安纳州进行成像,并截取145×145进行标注用于早期高光谱图像分类的数据集。它是由机载可是红外成像光谱仪(AVIRIS)拍摄,AVIRIS的波长范围是400-2500nm。数据集空间分辨率约为20米,含有220个连续波段,去掉20个吸水带(104-105,150-163、220),实际用于训练的波段是200个。研究区域有16中地物类型,包括玉米Corn、燕麦Oats、小麦Wheat、树林Woods等。影像中共有21025个像素,其中10249是地物像素,10776是背景像素。
下载链接:Indian Pines
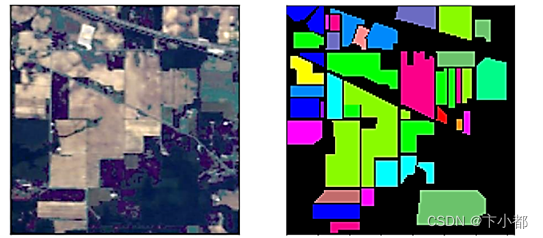
图1 (a)彩色图像 (b)Ground_Truth
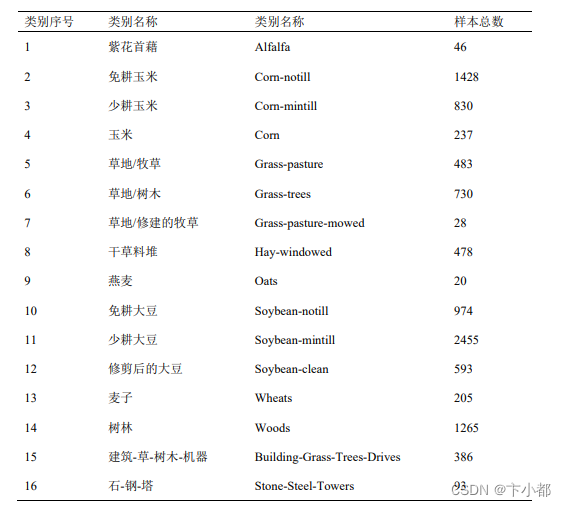
表1 具体地物类别
KSC数据集是于1996年3月份在美国佛罗里达州肯尼迪太空中心进行成像,截取512×614大小进行标注的高光谱数据集。它是由机载可是红外成像光谱仪(AVIRIS)摄,AVIRIS的波长范围是400-2500nm。空间分辨率为18米,在去除吸水带以及低信噪比波段后,实际用于训练的波段是176个。研究区域有13中地物类型,包括Scrub、Willow swamp、Cabbage palm hammock、Slash pine等。
下载链接:KSC
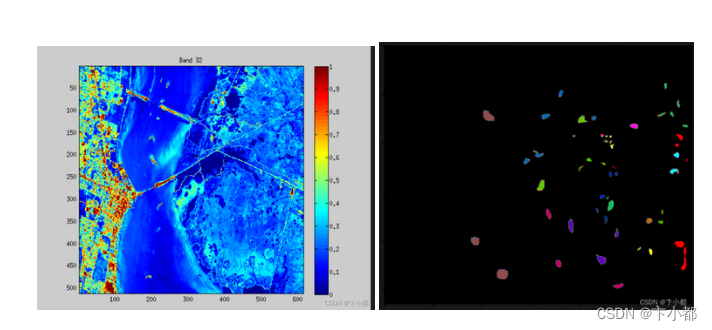
图2 (a)伪彩色图像 (b)Ground_Truth
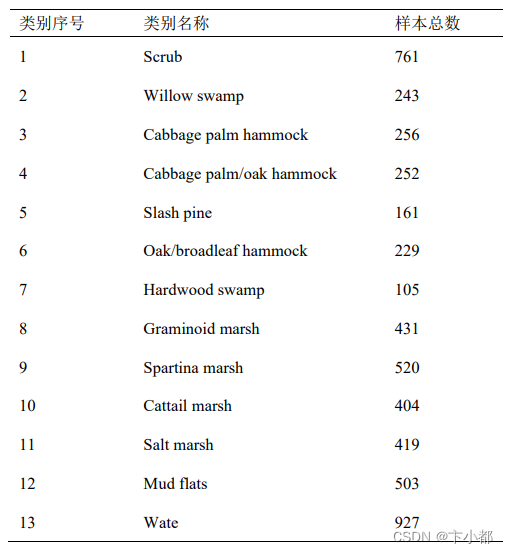
表2 具体地物类别
Salinas数据集由AVIRIS传感器在加利福尼亚州Salinas Valley拍摄,数据集大小为512×217,空间分辨率为3.7米,含有224个连续波段,去掉20个吸水带(108-112、154-167、224),实际用于训练的波段是204个。研究区域有16中地物类型,包括vegetables、bare soils、vineyard fields等。
下载链接:Salinas
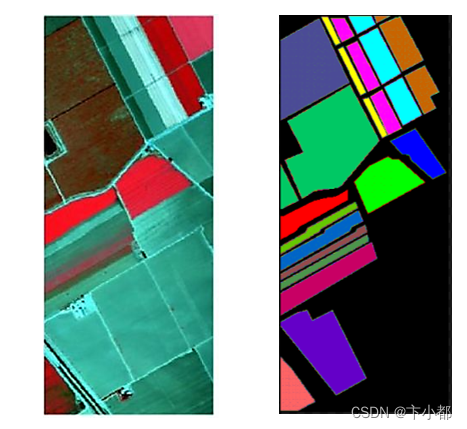
图3 (a)假彩色图像 (b)Ground_Truth
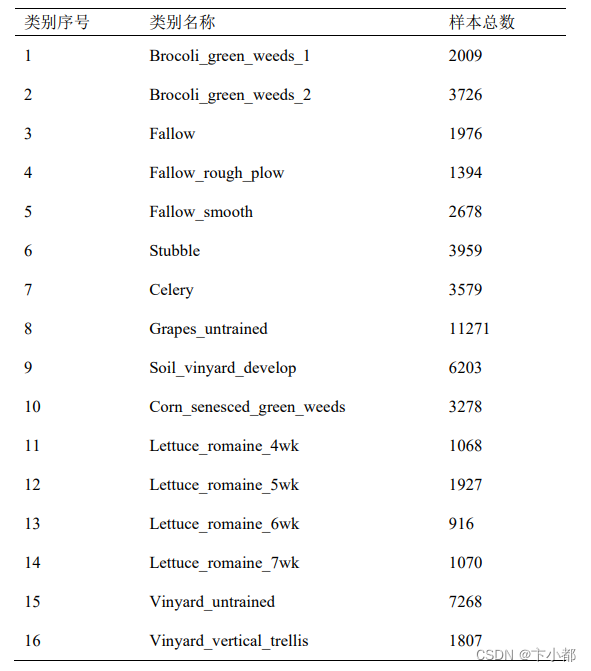
表3 具体地物类别
Pavia U和Pavia C数据集在意大利北部帕维亚上空飞行时获得的影像,是由ROSIS传感器拍摄的,光谱范围是430-860nm,共115个波段,空间分辨率为1.3米。Pavia U实际用于训练的是103个波段,大小为610×340,共9类地物。Pavia C实际用于训练的是102个波段,大小为1096×715,也是有9种分类地物。
下载链接:Pavia U&C
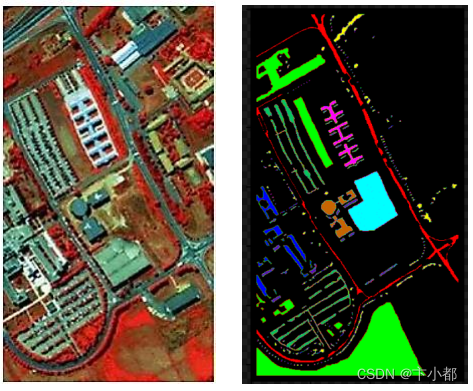
图4 (a)伪彩色图像 (b)Ground_Truth
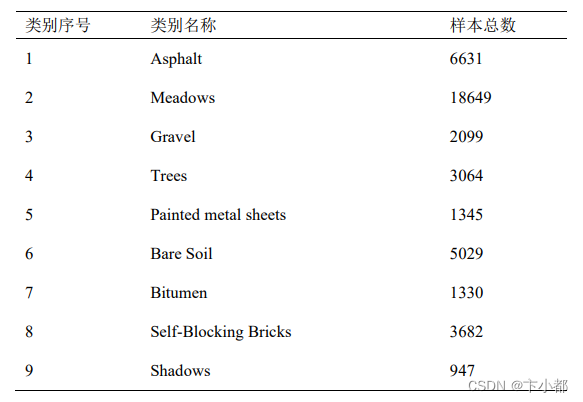
表4 Pavia U具体地物类别
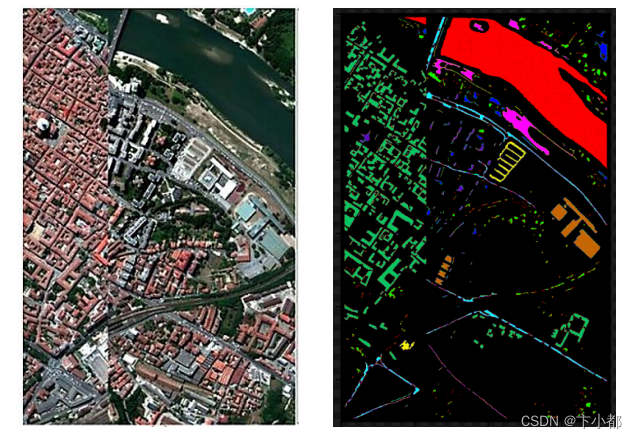
图5 (a)彩色图像 (b)Ground_Truth
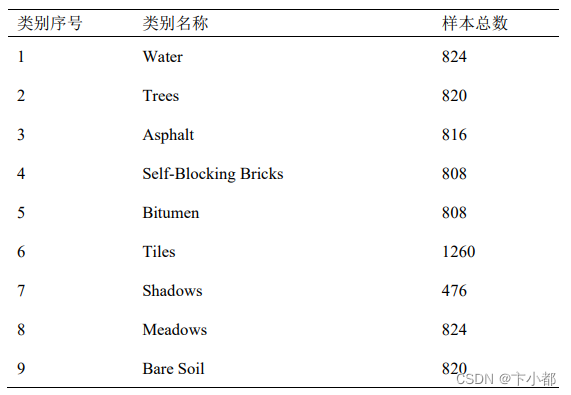
表5 Pavia C具体地物类别
武汉无人机高光谱影像数据集(WHU-Hi)由武汉大学RSIDEA课题组收集和共享,可作为农作物精确分类和高光谱影像分类研究的基准数据集。WHU-Hi数据集包含三个独立的无人机高光谱数据集:WHU-Hi-LongKou、WHU-Hi-HanChuan和WHU-Hi-HongHu。所有数据集都是通过安装在无人机平台上的Headwall Nano-Hyperspec传感器在中国湖北省不同作物类型的农业地区获得的。与星载和机载高光谱平台相比,无人机(UAV)载高光谱系统可以获得高空间分辨率的高光谱图像。
下载链接:WHU-Hi
WHU-Hi-LongKou数据集是于2018年7月17日13:49-14:37在中国湖北省龙口镇采集,采用安装在大疆Matrice 600 Pro (DJI M600 Pro)无人机平台上的8毫米焦距头壁纳米高光谱成像传感器。数据采集期间,天气晴朗无云,气温36℃左右,空气相对湿度65%左右。研究区域是一个简单的农业场景,包含六种作物:玉米、棉花、芝麻、宽叶大豆、窄叶大豆和水稻。无人机飞行高度为500 m,图像尺寸为550 × 400,在400 ~ 1000 nm内有270个波段,无人机载高光谱图像空间分辨率约0.463 m。
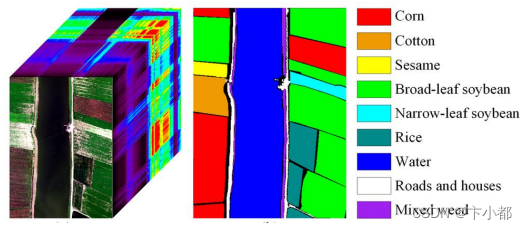
图6 (a)彩色图像 (b)Ground_Truth
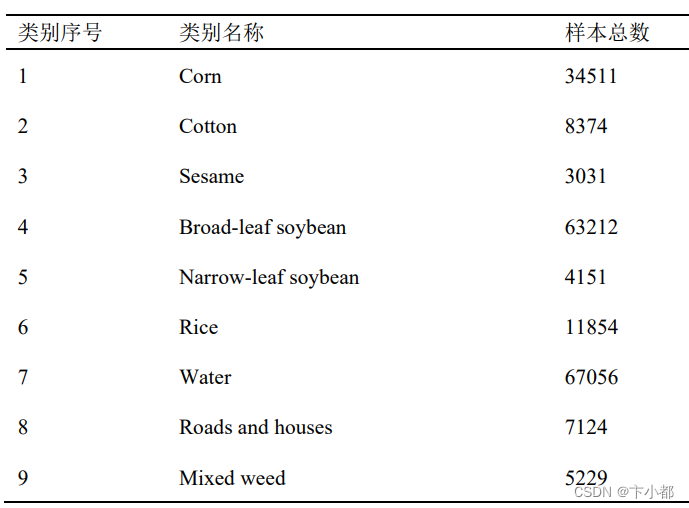
表6 LongKou具体地物类别
WHU-Hi-HanChuan数据集于2016年6月17日17:57 - 18:46在中国湖北省汉川获得,采用搭载在徕卡Aibot X6无人机V1平台上的17毫米焦距头壁纳米高光谱成像传感器。数据采集期间,天气晴朗无云,气温在30℃左右,空气相对湿度在70%左右。研究区是一个有建筑、有水、有耕地的城乡结合部,包含草莓、豇豆、大豆、高粱、空心菜、西瓜、青菜等七种作物。无人机飞行高度为250 m,图像尺寸为1217 × 303,在400 ~ 1000 nm内有274个波段,无人机载高光谱图像空间分辨率约为0.109 m。值得注意的是,由于WHU-Hi-HanChuan数据集是在太阳高度角较低的下午获取的,因此图像中存在许多阴影覆盖区域。
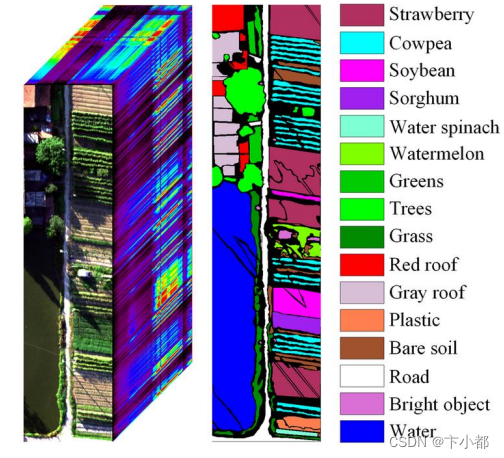
图7(a)彩色图像 (b)Ground_Truth
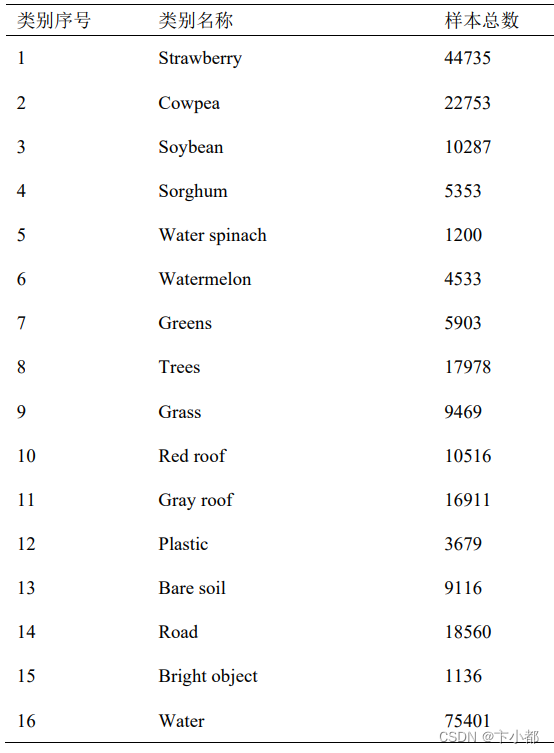
表7 HanChuan具体地物类别
WHU-Hi-HongHu数据集于2017年11月20日16时23分至17时37分在中国湖北省洪湖市获得,该数据集是在大疆Matrice 600 Pro无人机平台上装备的17毫米焦距头壁纳米高光谱成像传感器。数据采集期间,天气多云,温度8℃左右,空气相对湿度55%左右。实验区是一个复杂的农业场景,作物种类多,同一作物的不同品种也在该区域种植,包括大白菜和小白菜,芸苔和小芸苔。值得注意的是,该地区种植了同一作物类型的不同品种;例如,中国卷心菜、卷心菜和芸苔属植物、小芸苔属植物。无人机飞行高度为100 m,影像尺寸为940 × 475,在400 ~ 1000 nm有270个波段,无人机载高光谱影像空间分辨率约为0.043 m。
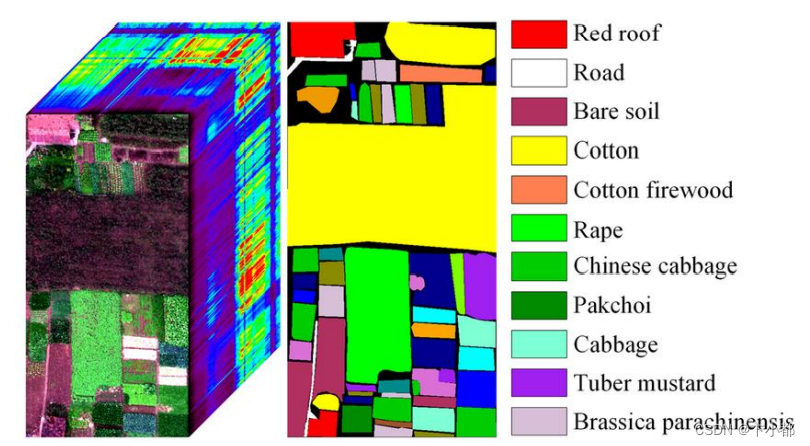
图8(a)彩色图像 (b)Ground_Truth
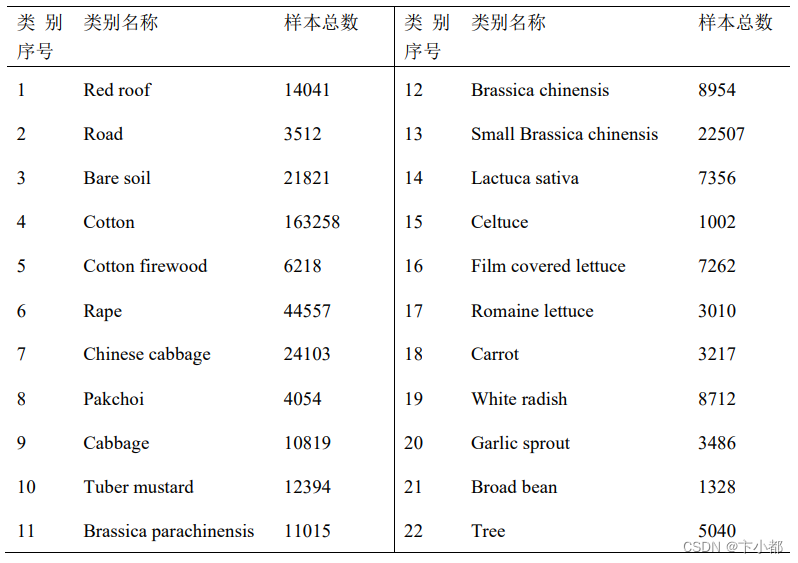
表8 HongHu具体地物类别
Houston数据集是由ITERS CASI-1500传感器在美国德克萨斯州休斯顿及其周边农村地区获取的,空间分辨率2.5米,数据大小为349×1905,含有144个波段,波段范围是364-1046nm。研究区域有15种地物类型,包括road道路、soil土地、tree树木、Highway公路等。
申请链接:Houston 2013
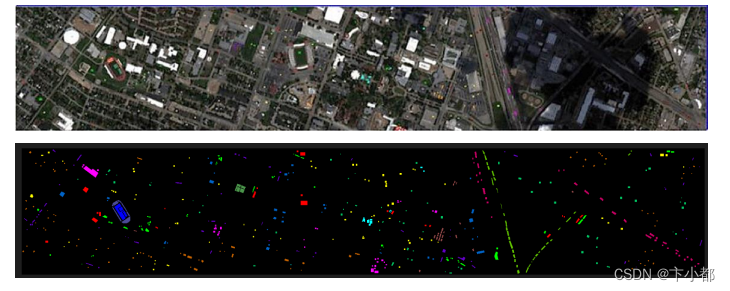
图9 (a)彩色图像 (b)Ground_Truth
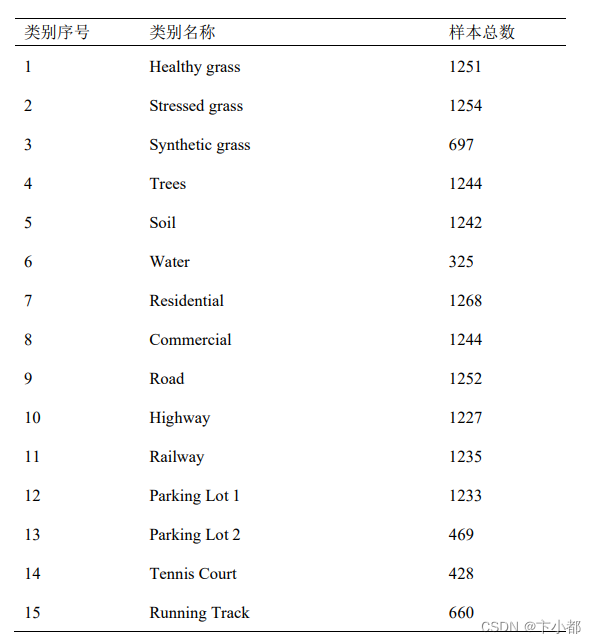
表9 具体地物类别
DFC2018 Houston 是2018年IEEE GRSS Data Fusion 比赛所用的数据集。这个数据是由 University of Houston Dr. Saurabh Prasad 的实验室制作公开的。这些数据是由NCALM于2017年2月16日格林尼治时间16:31至18:18期间在休斯顿大学校园及其附近获取的。这个数据是个多传感器数据,包含了48个波段的高光谱数据(1米),3波段的LiDAR数据(0.5米),以及超高分辨率影像(0.05米)。这个数据包含了20类地物,图片大小为2384×601。
下载链接:DFC2018 Houston
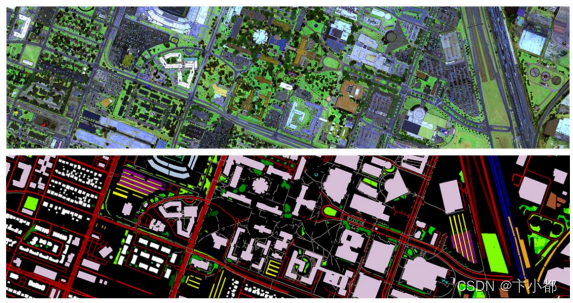
图10 (a)彩色图像 (b)Ground_Truth
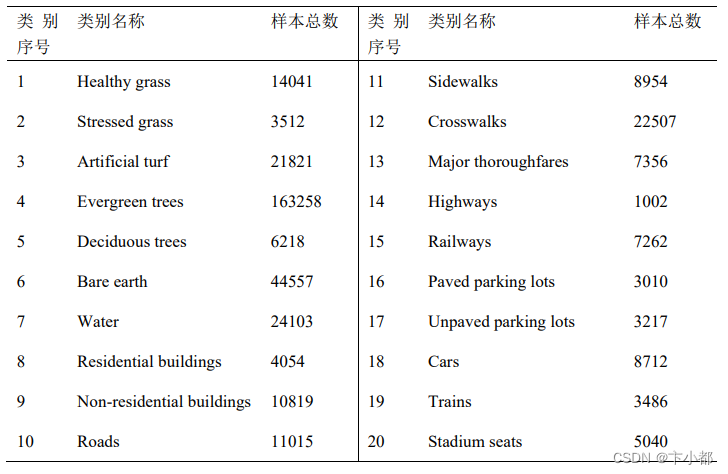
表10 具体地物类别
Botswana数据集是于2001年5月份在博茨瓦纳奥卡万戈三角洲由美国宇航局EO-1卫星获取的,图片大小1476*256。EO-1上的传感器波长范围是400-2500nm,空间分辨率约为20米,在242个波段中,去掉了噪声波段(1-9、56-81、98-101、120-133、165-186),实际用于训练的波段是145个。研究区共有14种地物类型。
下载链接:Botswana
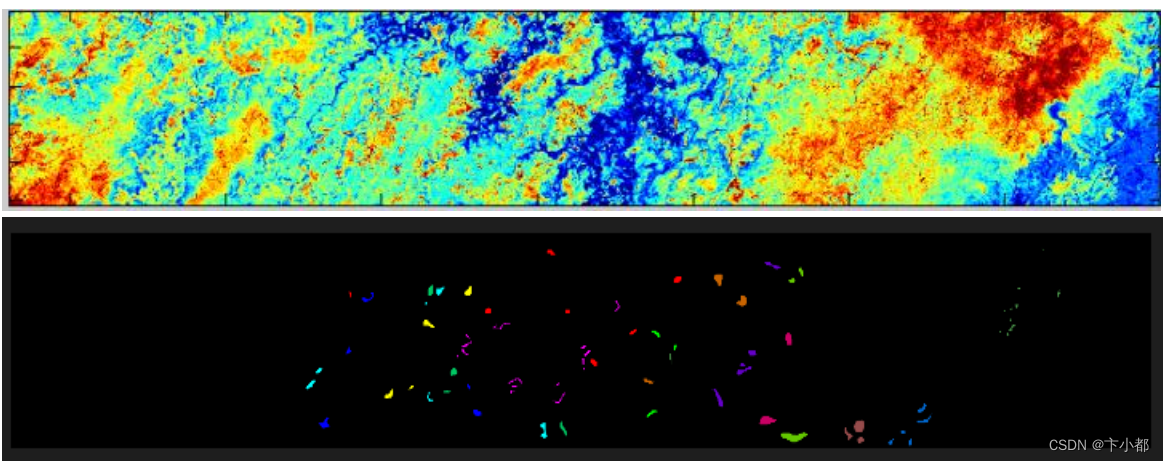
图11 (a)彩色图像 (b)Ground_Truth
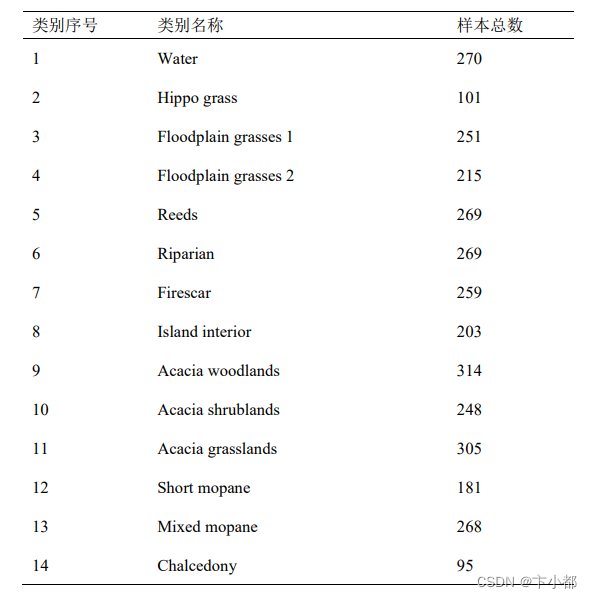
表11 具体地物类别
Washington DC数据集是由Hydice传感器获取的一幅华盛顿购物中心上空的航空高光谱影像,数据包含了从 0.4 -2.4 µm可见光和近红外波段范围的共191个波段,数据大小为1280×307。地物类别包括街道,草地,水,碎石小路,树木,阴影和屋顶。
下载链接:Washington DC
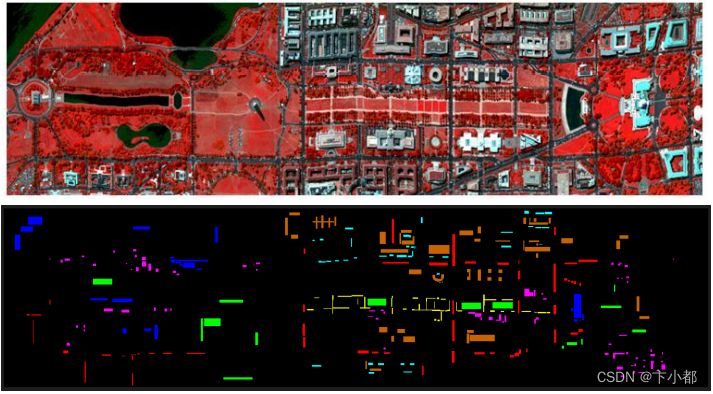
图12 (a)假彩色图像 (b)Ground_Truth
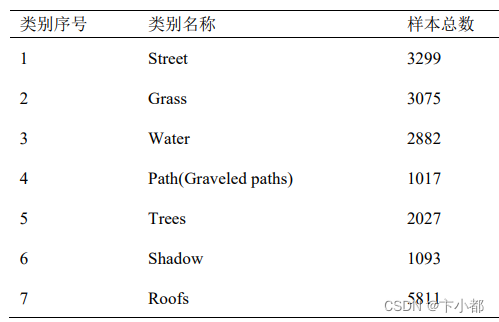
表12 具体地物类别
雄安(马蹄湾村)数据集是由中国科学院上海技术物理研究所研制的高分专项航空系统全谱段多模态成像光谱仪采集,光谱范围为400-1000 nm,波段数为250个,影像大小为3750*1580。地物类别共计19类,包括水稻茬、草地、榆树、白蜡、国槐、菜地、杨树、大豆、刺槐、水稻、水体、柳树、复叶械、栾树、桃树、玉米、梨树、荷叶、建筑。
下载链接:雄安新区
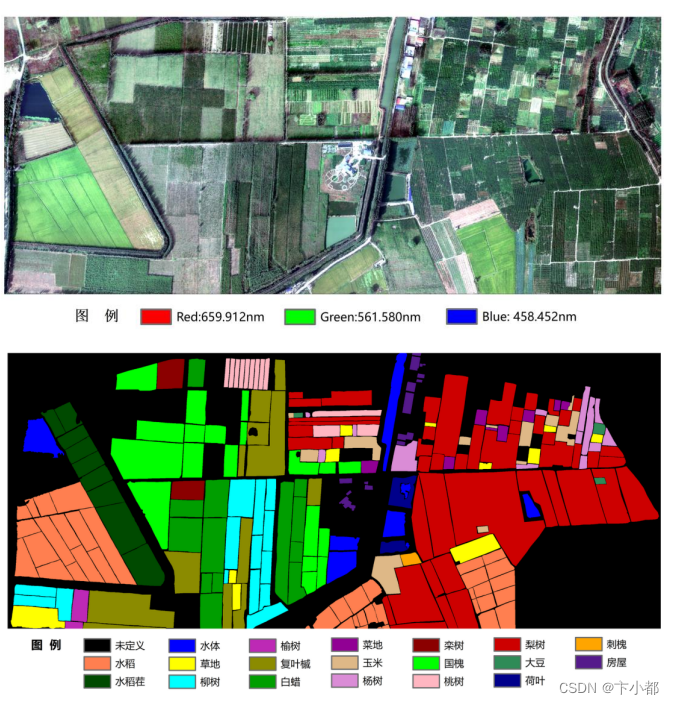
图13 (a)彩色图像 (b)Ground_Truth
Cuprite数据集在1997年在美国内华达州的Cuprite地区由机载可见红外成像光谱仪(Aviris)收集的。原始图像有224个波段,波长从370nm到2480nm,空间分辨率为20米。在移除噪声通道(1-2、221-224)和吸水通道(104-113、148-167)后,实际用于训练的波段是188个。
下载链接:Cuprite
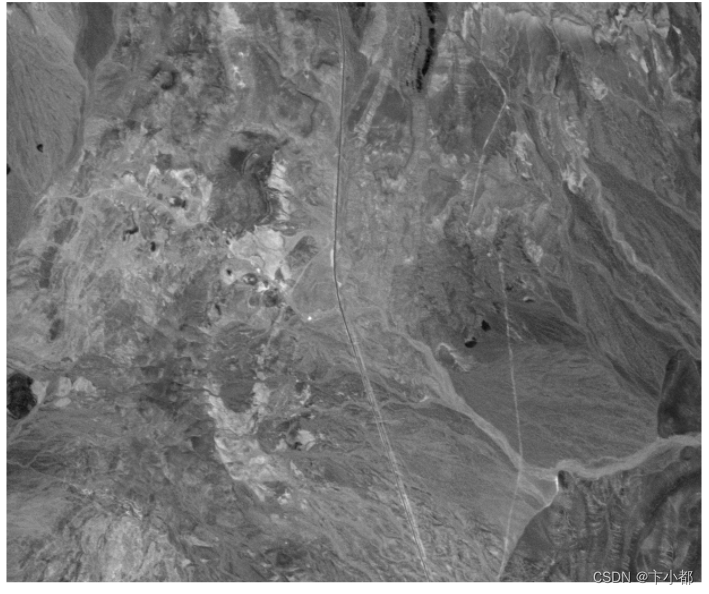
图14 灰度图像
HyRANK数据是由Hyperion 传感器获取的,空间分辨率30m。包含了两幅用于训练的高光谱图像(Dioni、Loukia)和三幅用于测试的高光谱图像。五幅图像均有176个光谱波段,图像大小各不相同。所提供的训练样本包含14种地物类别。Dioni数据集图片大小为250×1376;Loukia数据集图片大小为249×945。
百度网盘下载:https://pan.baidu.com/s/1RvzFl7eW8_CwajgMA03edA?pwd=1234
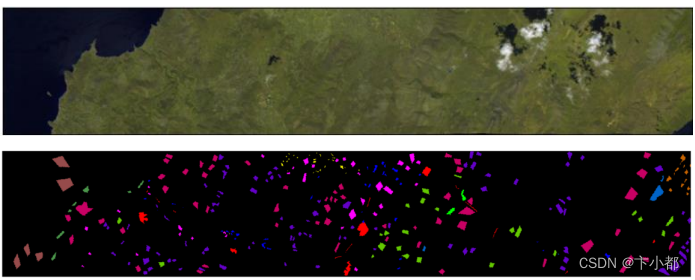
图15 (a)彩色图像 (b)Ground_Truth
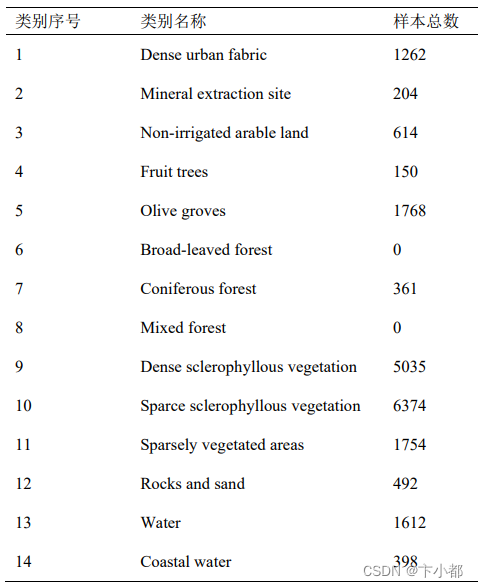
表13 Dioni具体地物类别
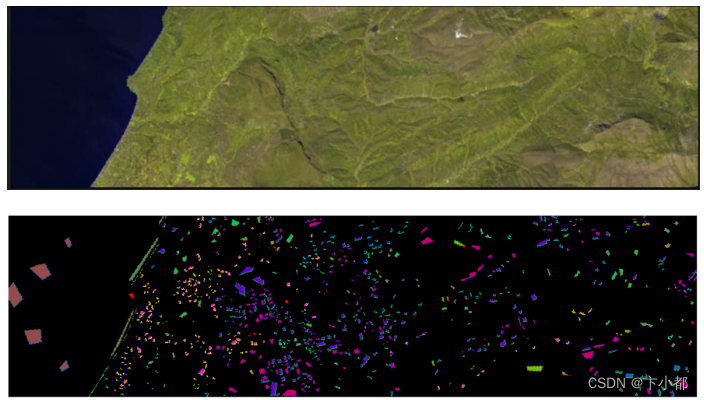
图16 (a)彩色图像 (b)Ground_Truth
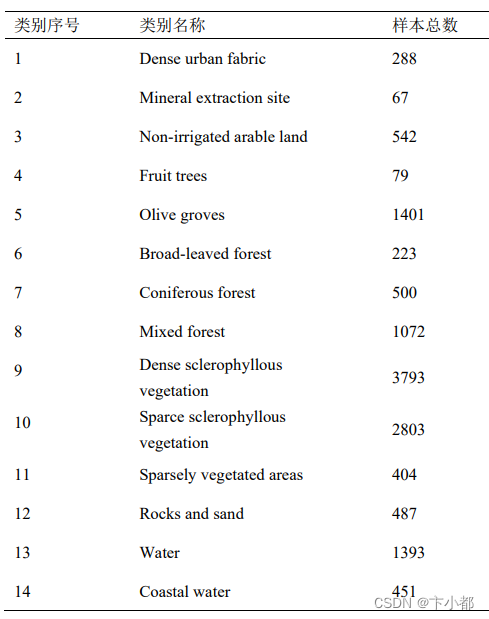
表14 Loukia具体地物类别
MUUFL数据集于2010年11月在位于密西西比州长滩的南密西西比大学海湾公园校区采集。HSI数据由ITRES研究有限公司紧凑型机载光谱成像仪(CASI)-1500传感器获取,该传感器由325 × 220像素组成,72个光谱通道(64个可用波段),范围为375 ~ 1050 nm,带宽为10 nm。HSI空间分辨率为0.54 × 1.0 m。在这个数据集中,包括Trees、Mostly grass、Mixed ground surface和Dirt and sand等11种地物。
百度网盘下载:https://pan.baidu.com/s/1pr7_LWztyP-Y4ZO0WegbmA?pwd=1234
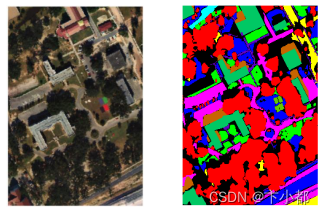
图17 (a)彩色图像 (b)Ground_Truth
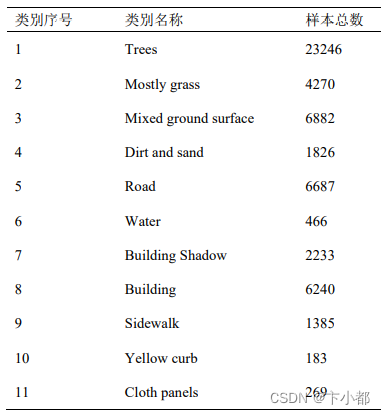
表15 具体地物类别
Trento数据集是在意大利Trento市南部的一个农村地区拍摄的。HSI数据由AISA Eagle传感器采集,该传感器由600 × 166像素组成,63个光谱通道,范围为0.40 ~ 0.98 μm。HSI的空间分辨率均为1 m。在这个数据集中,包括Apple trees、Buildings、Ground、Woods、Vineyard和Roads六种地物。
百度网盘下载:https://pan.baidu.com/s/1pr7_LWztyP-Y4ZO0WegbmA?pwd=1234
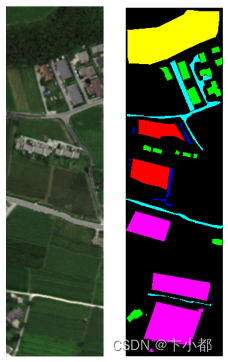
图18 (a)彩色图像 (b)Ground_Truth
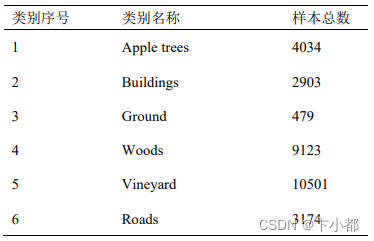
表16 具体地物类别
个人对数据集的整理有限,如有缺少不对的地方,请批评指正。
我主要使用Ruby来执行此操作,但到目前为止我的攻击计划如下:使用gemsrdf、rdf-rdfa和rdf-microdata或mida来解析给定任何URI的数据。我认为最好映射到像schema.org这样的统一模式,例如使用这个yaml文件,它试图描述数据词汇表和opengraph到schema.org之间的转换:#SchemaXtoschema.orgconversion#data-vocabularyDV:name:namestreet-address:streetAddressregion:addressRegionlocality:addressLocalityphoto:i
有时我需要处理键/值数据。我不喜欢使用数组,因为它们在大小上没有限制(很容易不小心添加超过2个项目,而且您最终需要稍后验证大小)。此外,0和1的索引变成了魔数(MagicNumber),并且在传达含义方面做得很差(“当我说0时,我的意思是head...”)。散列也不合适,因为可能会不小心添加额外的条目。我写了下面的类来解决这个问题:classPairattr_accessor:head,:taildefinitialize(h,t)@head,@tail=h,tendend它工作得很好并且解决了问题,但我很想知道:Ruby标准库是否已经带有这样一个类? 最佳
我有带有Logo图像的公司模型has_attached_file:logo我用他们的Logo创建了许多公司。现在,我需要添加新样式has_attached_file:logo,:styles=>{:small=>"30x15>",:medium=>"155x85>"}我是否应该重新上传所有旧数据以重新生成新样式?我不这么认为……或者有什么rake任务可以重新生成样式吗? 最佳答案 参见Thumbnail-Generation.如果rake任务不适合你,你应该能够在控制台中使用一个片段来调用重新处理!关于相关公司
我正在尝试使用Curbgem执行以下POST以解析云curl-XPOST\-H"X-Parse-Application-Id:PARSE_APP_ID"\-H"X-Parse-REST-API-Key:PARSE_API_KEY"\-H"Content-Type:image/jpeg"\--data-binary'@myPicture.jpg'\https://api.parse.com/1/files/pic.jpg用这个:curl=Curl::Easy.new("https://api.parse.com/1/files/lion.jpg")curl.multipart_form_
无论您是想搭建桌面端、WEB端或者移动端APP应用,HOOPSPlatform组件都可以为您提供弹性的3D集成架构,同时,由工业领域3D技术专家组成的HOOPS技术团队也能为您提供技术支持服务。如果您的客户期望有一种在多个平台(桌面/WEB/APP,而且某些客户端是“瘦”客户端)快速、方便地将数据接入到3D应用系统的解决方案,并且当访问数据时,在各个平台上的性能和用户体验保持一致,HOOPSPlatform将帮助您完成。利用HOOPSPlatform,您可以开发在任何环境下的3D基础应用架构。HOOPSPlatform可以帮您打造3D创新型产品,HOOPSSDK包含的技术有:快速且准确的CAD
本教程将在Unity3D中混合Optitrack与数据手套的数据流,在人体运动的基础上,添加双手手指部分的运动。双手手背的角度仍由Optitrack提供,数据手套提供双手手指的角度。 01 客户端软件分别安装MotiveBody与MotionVenus并校准人体与数据手套。MotiveBodyMotionVenus数据手套使用、校准流程参照:https://gitee.com/foheart_1/foheart-h1-data-summary.git02 数据转发打开MotiveBody软件的Streaming,开始向Unity3D广播数据;MotionVenus中设置->选项选择Unit
文章目录一、概述简介原理模块二、配置Mysql使用版本环境要求1.操作系统2.mysql要求三、配置canal-server离线下载在线下载上传解压修改配置单机配置集群配置分库分表配置1.修改全局配置2.实例配置垂直分库水平分库3.修改group-instance.xml4.启动监听四、配置canal-adapter1修改启动配置2配置映射文件3启动ES数据同步查询所有订阅同步数据同步开关启动4.验证五、配置canal-admin一、概述简介canal是Alibaba旗下的一款开源项目,Java开发。基于数据库增量日志解析,提供增量数据订阅&消费。Git地址:https://github.co
我正在尝试在Rails上安装ruby,到目前为止一切都已安装,但是当我尝试使用rakedb:create创建数据库时,我收到一个奇怪的错误:dyld:lazysymbolbindingfailed:Symbolnotfound:_mysql_get_client_infoReferencedfrom:/Library/Ruby/Gems/1.8/gems/mysql2-0.3.11/lib/mysql2/mysql2.bundleExpectedin:flatnamespacedyld:Symbolnotfound:_mysql_get_client_infoReferencedf
文章目录1.开发板选择*用到的资源2.串口通信(个人理解)3.代码分析(注释比较详细)1.主函数2.串口1配置3.串口2配置以及中断函数4.注意问题5.源码链接1.开发板选择我用的是STM32F103RCT6的板子,不过代码大概在F103系列的板子上都可以运行,我试过在野火103的霸道板上也可以,主要看一下串口对应的引脚一不一样就行了,不一样的就更改一下。*用到的资源keil5软件这里用到了两个串口资源,采集数据一个,串口通信一个,板子对应引脚如下:串口1,TX:PA9,RX:PA10串口2,TX:PA2,RX:PA32.串口通信(个人理解)我就从串口采集传感器数据这个过程说一下我自己的理解,
SPI接收数据左移一位问题目录SPI接收数据左移一位问题一、问题描述二、问题分析三、探究原理四、经验总结最近在工作在学习调试SPI的过程中遇到一个问题——接收数据整体向左移了一位(1bit)。SPI数据收发是数据交换,因此接收数据时从第二个字节开始才是有效数据,也就是数据整体向右移一个字节(1byte)。请教前辈之后也没有得到解决,通过在网上查阅前人经验终于解决问题,所以写一个避坑经验总结。实际背景:MCU与一款芯片使用spi通信,MCU作为主机,芯片作为从机。这款芯片采用的是它规定的六线SPI,多了两根线:RDY和INT,这样从机就可以主动请求主机给主机发送数据了。一、问题描述根据从机芯片手