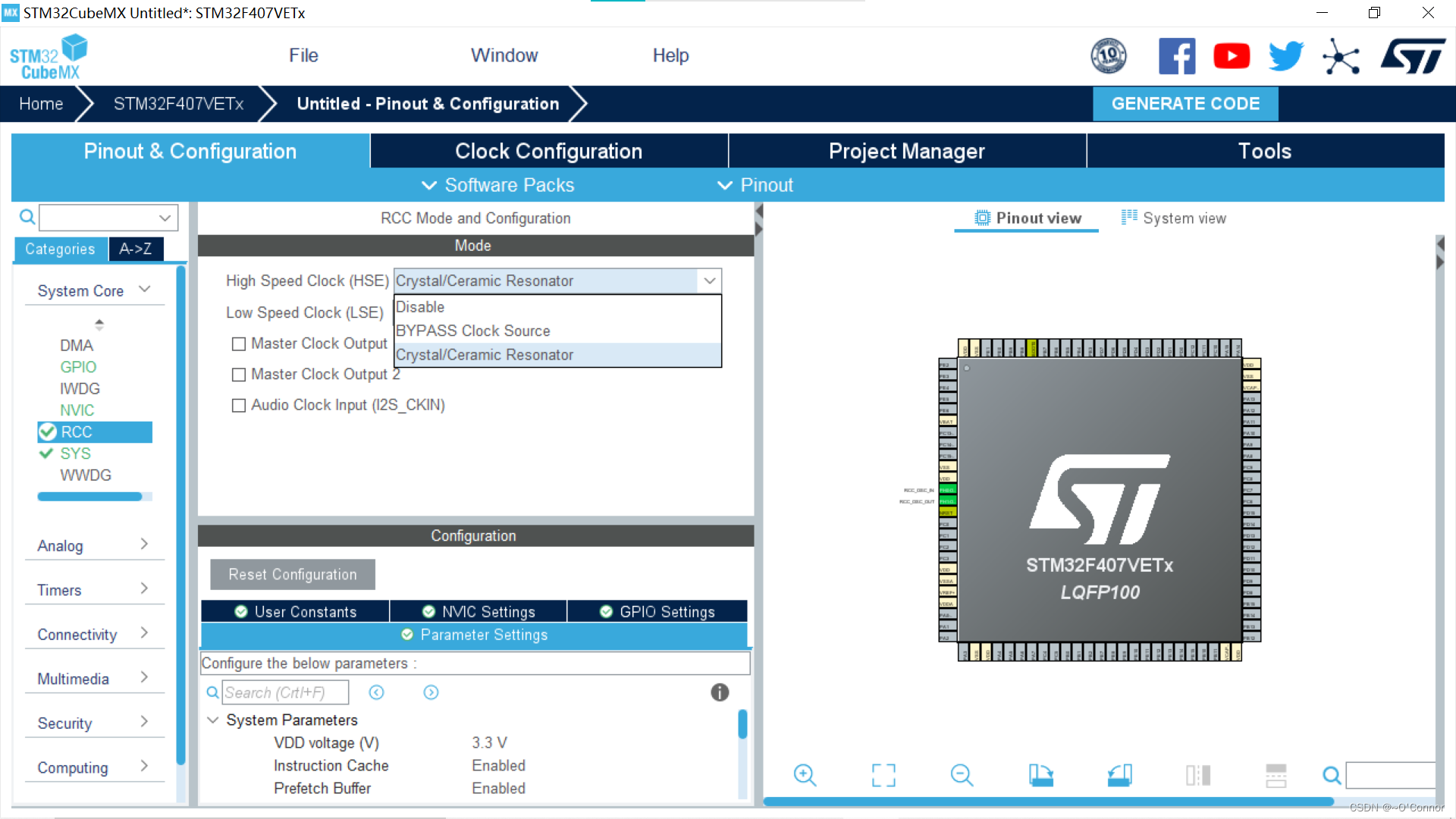
首先选择外部晶振:
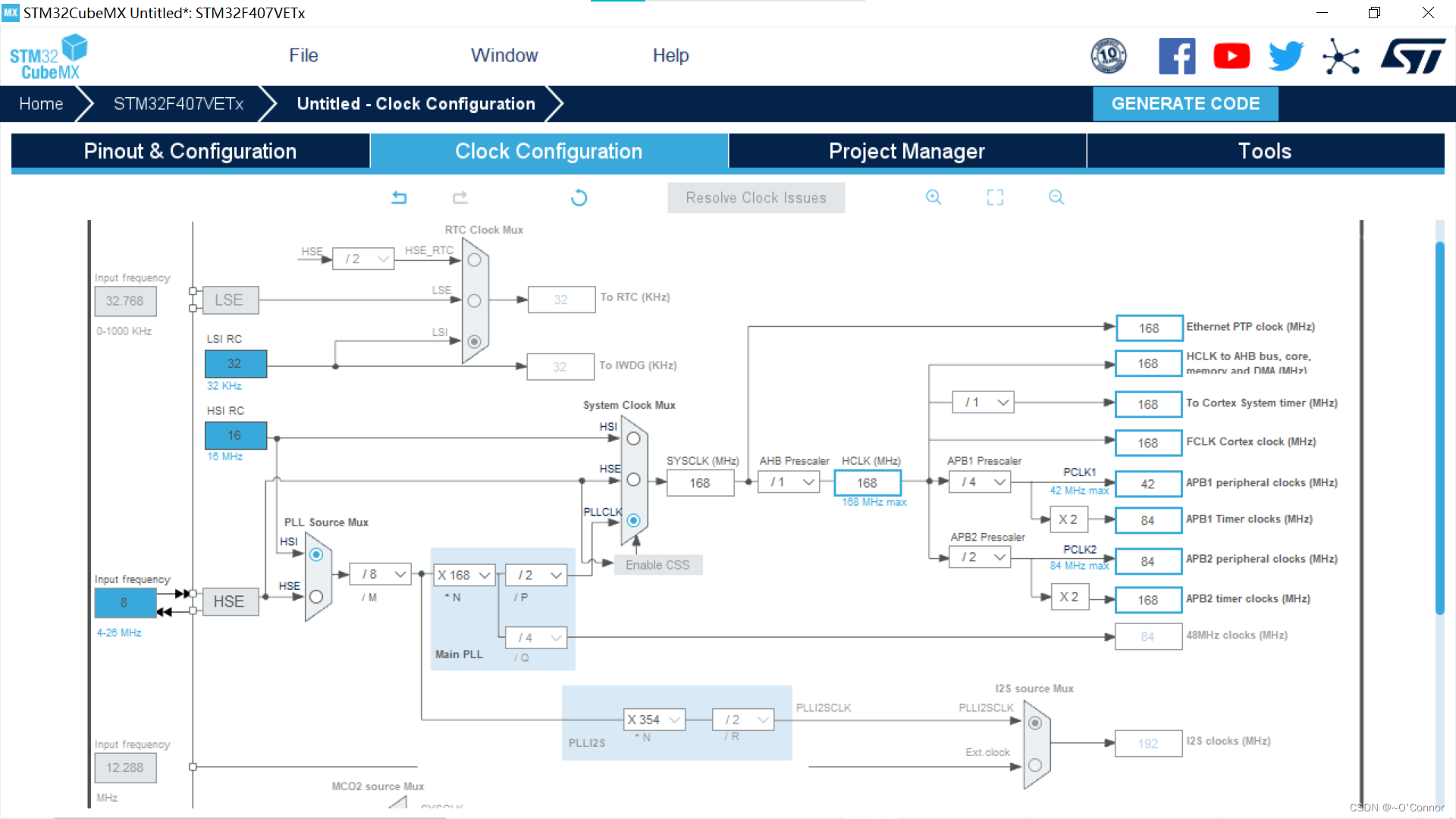
配置时钟频率:
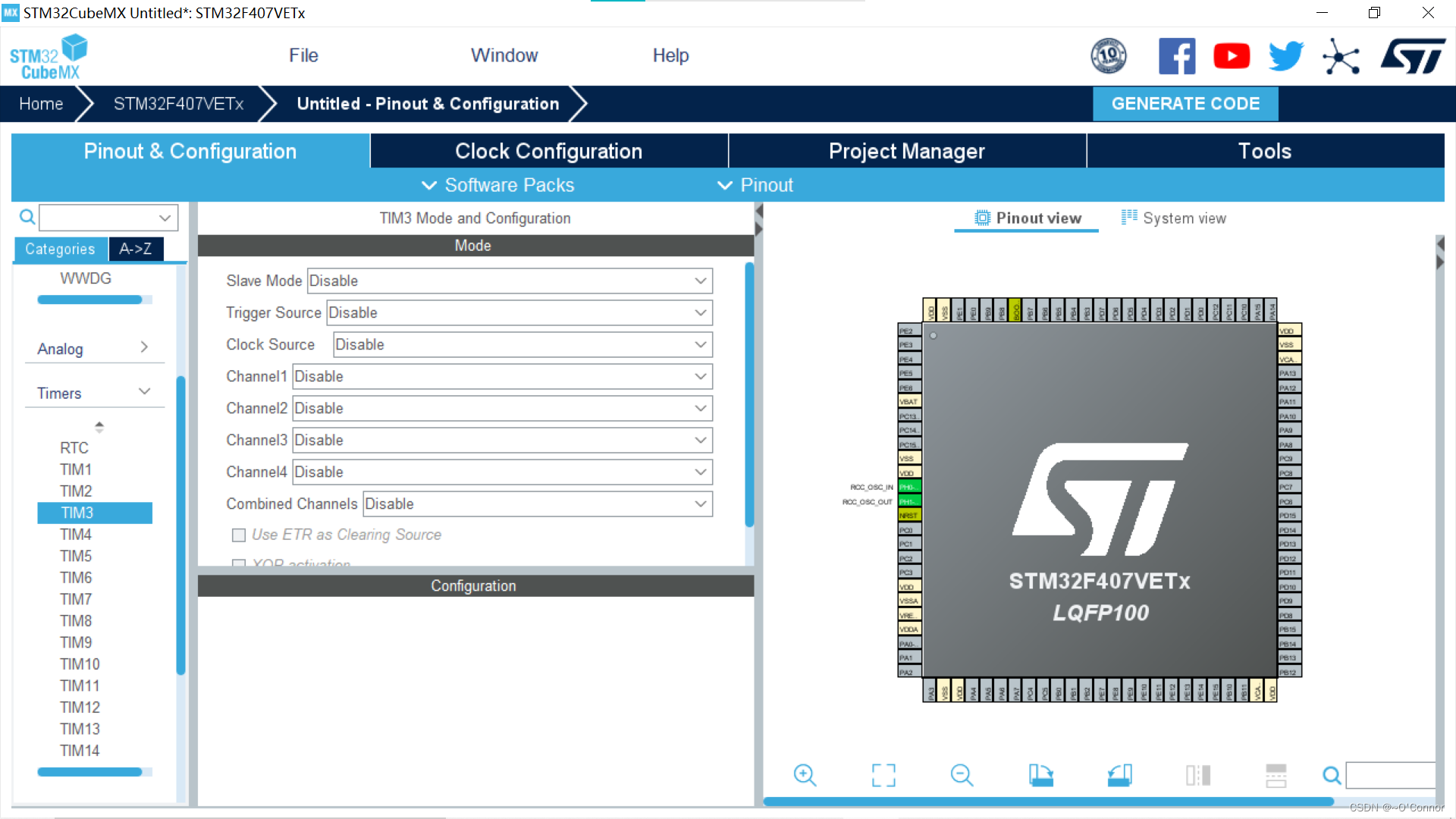
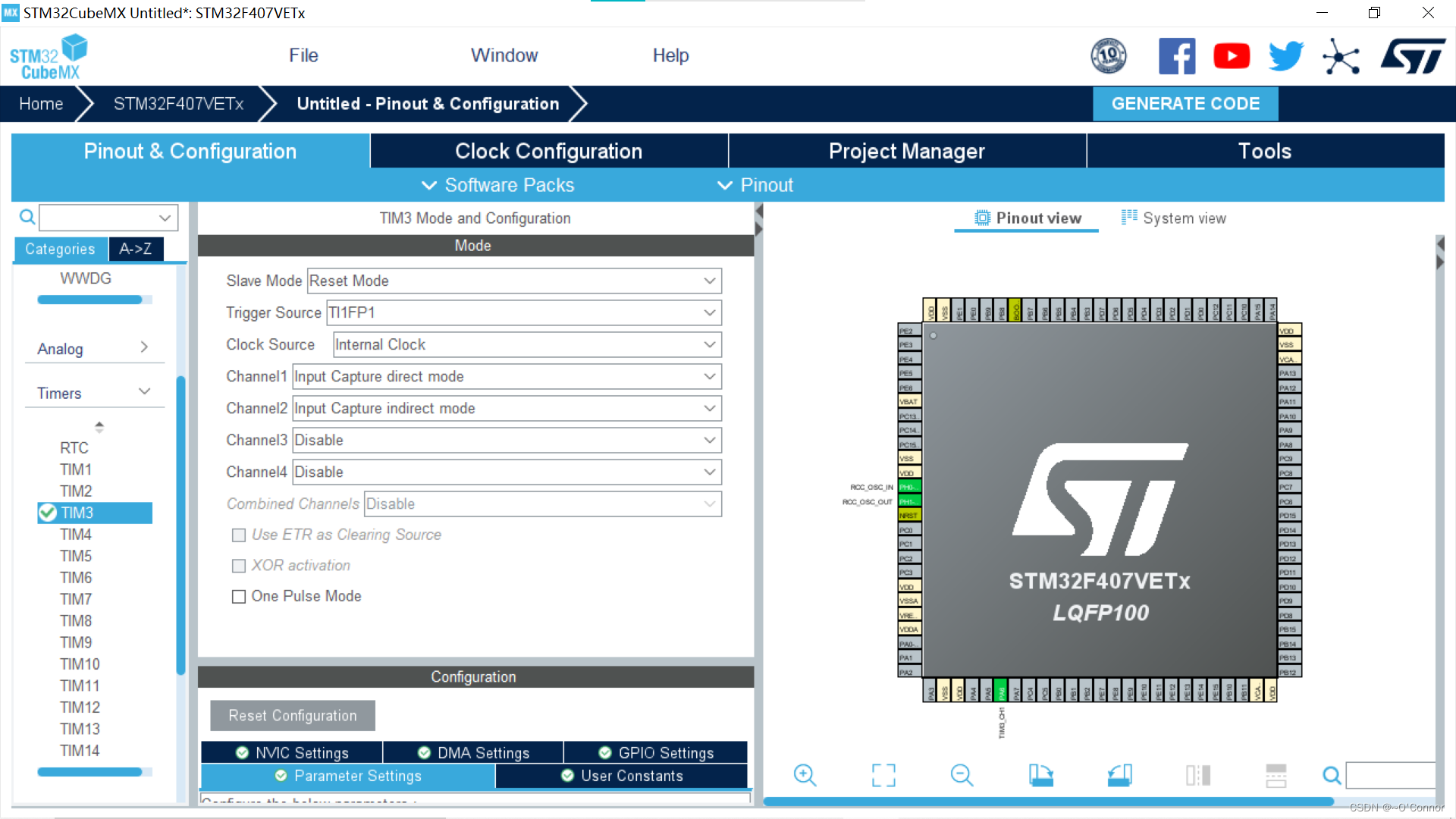
选择使用的定时器:
根据内部原理图:
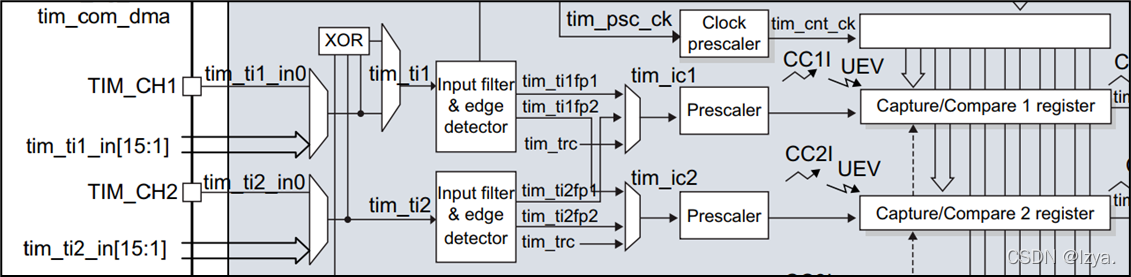
这里以TIM_CH1为例,当从CH1输入一个PWM波,通过输入滤波后将会产生两路信号:tim_ti1fp1 & tim_ti1fp2,分别送至tim_ic1 & tim_ic2,也就是说一个TI信号将会被映射成两路的IC信号,所以可以通过进行边沿检测来测量PWM的频率以及占空比。
具体步骤如下:
1、设置定时器Slave Mode为Reset Mode,也就是当检测到上升沿时,定时器复位;
2、PWM由CH1进入,触发源设置为TI1FP1,并设置IC1为上升沿捕获;
3、当第一次捕获到上升沿时,定时器复位,计数寄存器CNT清零;
4、当IC2捕获到下降沿时,计数器CNT的值将会被存到捕获寄存器CCR2中;
5、当IC1再次捕获到上升沿时,计数器CNT的值将会被存到捕获寄存器CCR1中,同时将定时器复位;
因此,CCR1的值就是周期,CCR2的值就是占空比。
配置如下:
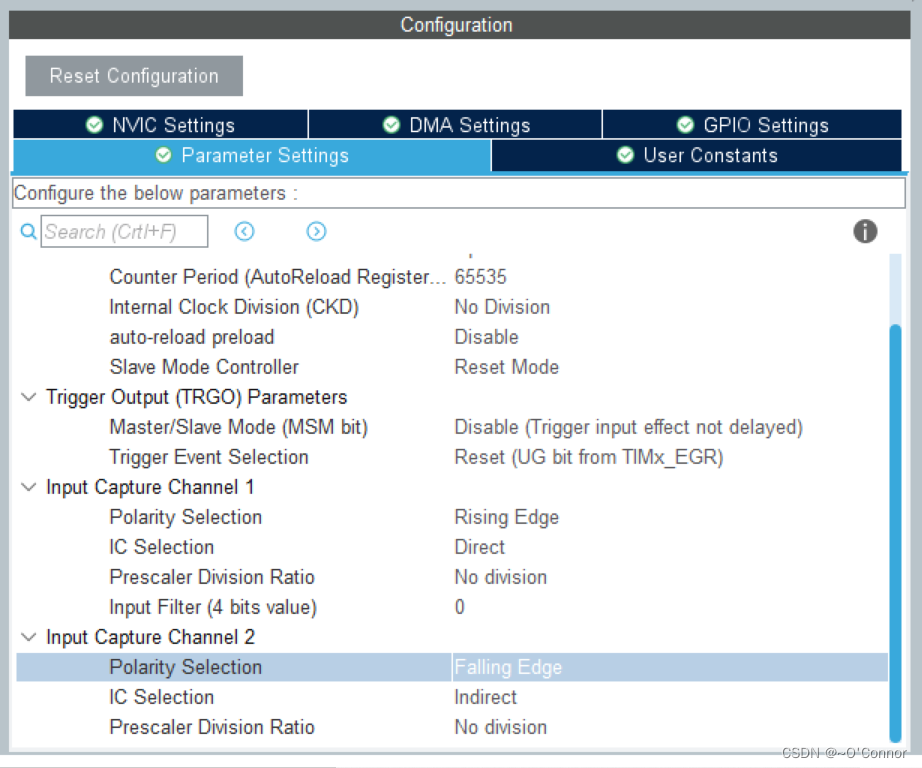
通道1设置为直接模式,通道2设置为间接模式。
而最终计算得到的频率值 = 分频后得到的时钟频率 / 上升沿个数
= ( 定时器时钟频率 / 预分频系数 )/ 上升沿个数 ;
最终计算的到的占空比 = 下降沿个数 / 上升沿个数;
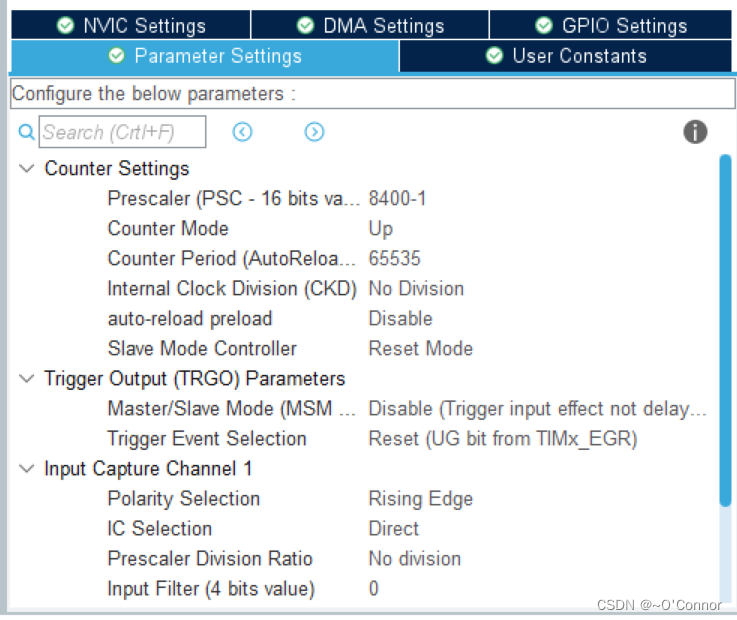
值得注意的是:要明确输入PWM波的大致范围,因为需要根据PWM波范围来确定预分频系数;比如说输入一个频率大概为50Hz,占空比为10%的PWM波,需要将预分频系数稍微设置大一些;(这是因为:定时器所能测量到的最小频率 = 定时器频率 / ( 预分频系数 * 自动重载值 ),而因为ARR(Auto-Reload-Register)是一个十六位寄存器,其最大值为65536,所以当需要测量的频率值较小时,必须要将预分频系数设为较大值)
以本次使用定时器TIM3为例,其时钟频率已配置为84MHz,再配置PSC(Prescaler)为(8400-1),因此,最终频率 = ( 84000000 / 8400 )/ PWM_RisingCount;
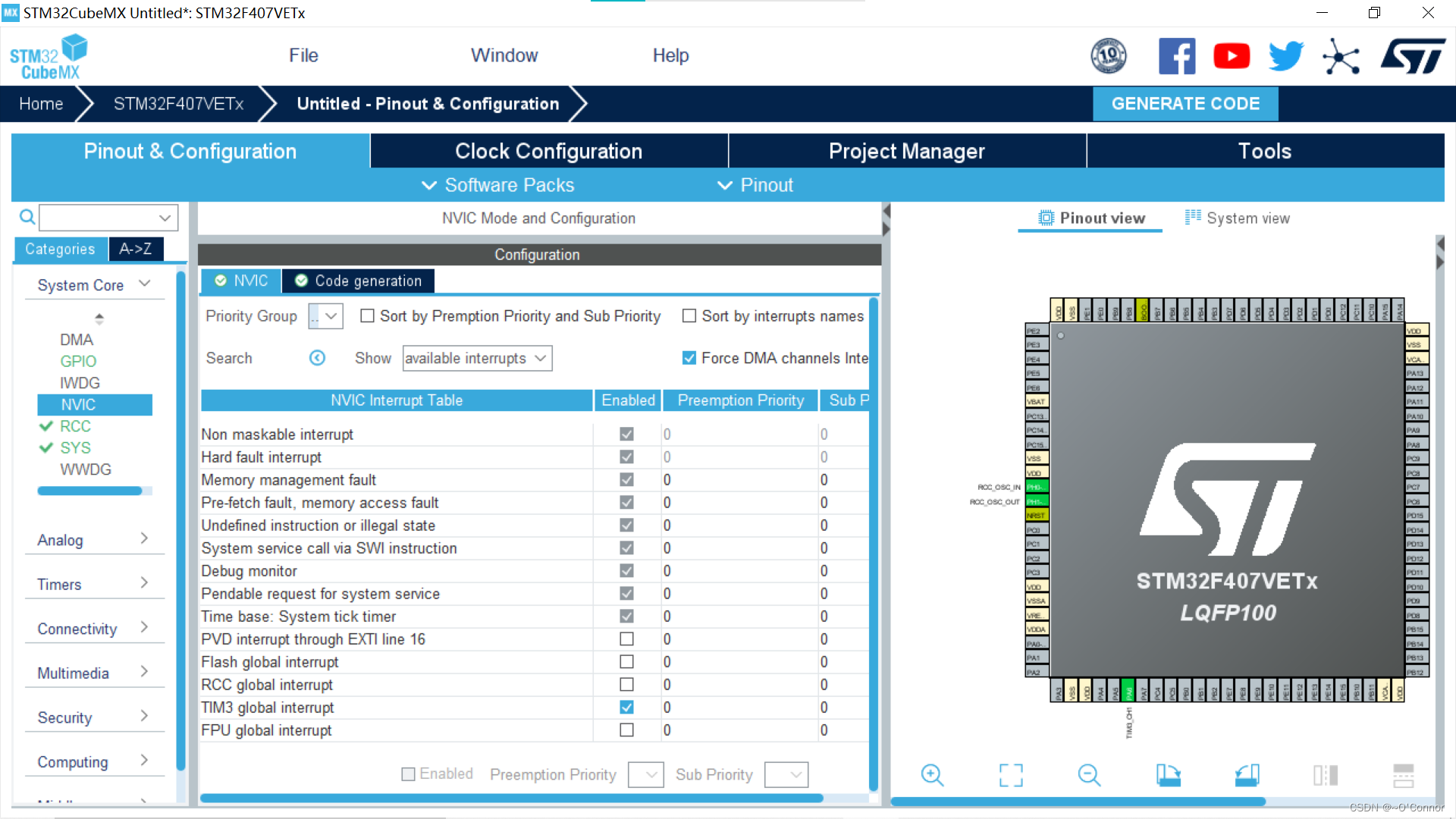
参数配置:
再打开定时器中断:
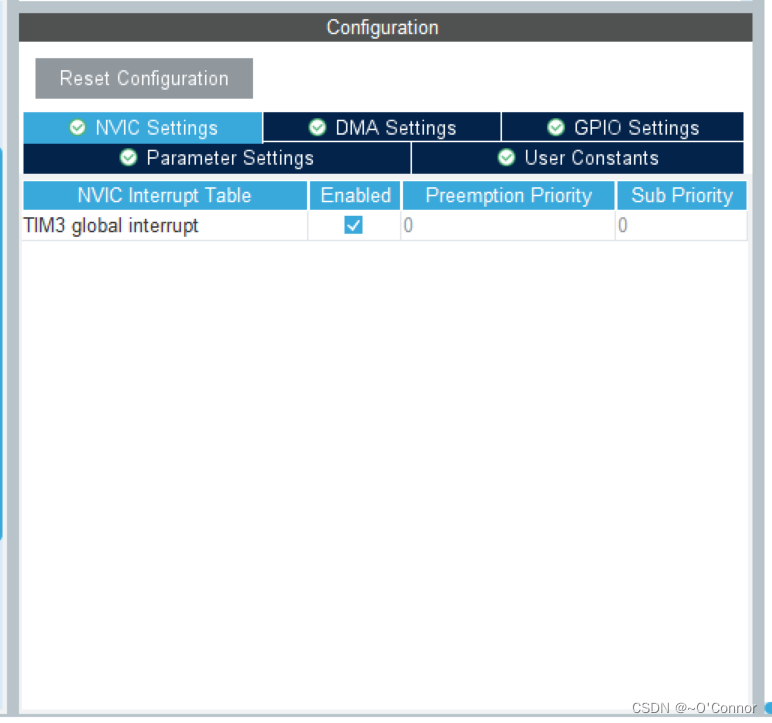
配置NVIC(Nested Vector Interrupt Controller):
代码:
1、全局变量以及主函数
/* USER CODE BEGIN 0 */
uint16_t PWM_RisingCount;
uint16_t PWM_FallingCount;
float duty;
/* USER CODE END 0 */
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_TIM3_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
HAL_TIM_IC_Start_IT(&htim3,TIM_CHANNEL_1);
HAL_TIM_IC_Start_IT(&htim3,TIM_CHANNEL_2);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
//每1秒输出一次
HAL_Delay(1000);
//这里的10000就是由定时器频率84000000/预分频系数8400 得到
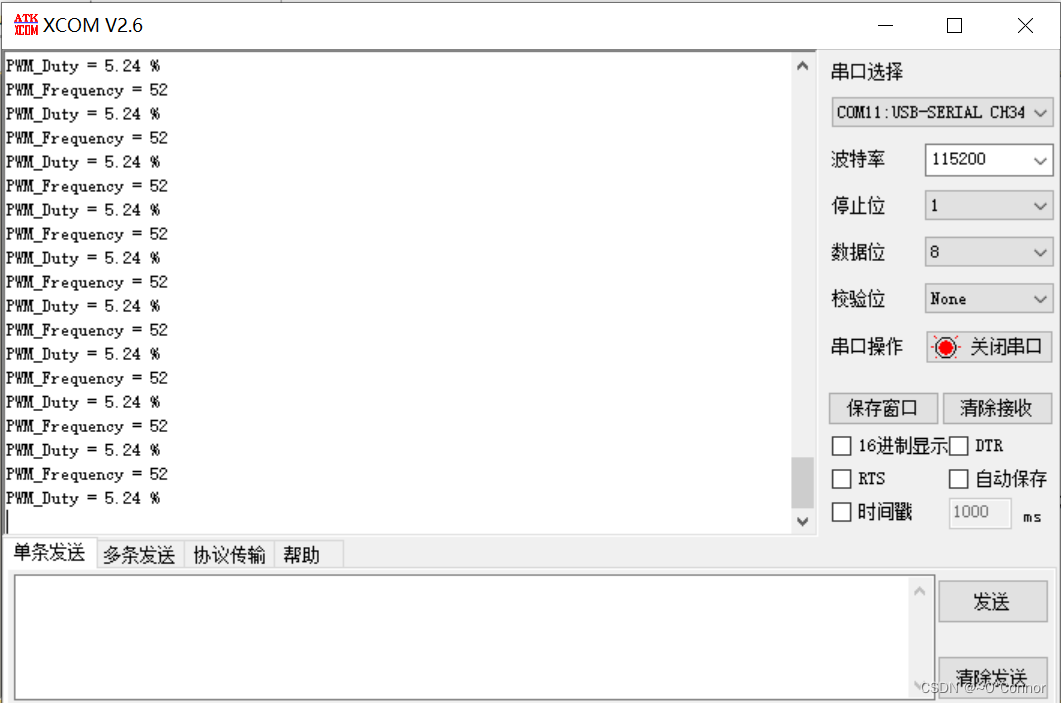
printf("PWM_Frequency = %d \r\n",(uint16_t)10000/PWM_RisingCount);
printf("PWM_Duty = %.2f %% \r\n",duty * 100);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
2、输入捕获中断回调函数
/* USER CODE BEGIN 4 */
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{
if(htim->Channel == HAL_TIM_ACTIVE_CHANNEL_1)
//注意这里为HAL_TIM_ACTIVE_CHANNEL_1而不是TIM_CHANNEL_1
{
PWM_RisingCount = HAL_TIM_ReadCapturedValue(&htim3,TIM_CHANNEL_1);
duty = (float)PWM_FallingCount / PWM_RisingCount;
}
if(htim->Channel == HAL_TIM_ACTIVE_CHANNEL_2)
{
PWM_FallingCount = HAL_TIM_ReadCapturedValue(&htim3,TIM_CHANNEL_2);
}
}
/* USER CODE END 4 */
最终结果如下:
(输入为另一块STM32产生的PWM波,频率为50Hz,占空比为5%,可以看到有些许误差,这是因为没有进行滤波的缘故)
我正在使用的第三方API的文档状态:"[O]urAPIonlyacceptspaddedBase64encodedstrings."什么是“填充的Base64编码字符串”以及如何在Ruby中生成它们。下面的代码是我第一次尝试创建转换为Base64的JSON格式数据。xa=Base64.encode64(a.to_json) 最佳答案 他们说的padding其实就是Base64本身的一部分。它是末尾的“=”和“==”。Base64将3个字节的数据包编码为4个编码字符。所以如果你的输入数据有长度n和n%3=1=>"=="末尾用于填充n%
我有一个在Linux服务器上运行的ruby脚本。它不使用rails或任何东西。它基本上是一个命令行ruby脚本,可以像这样传递参数:./ruby_script.rbarg1arg2如何将参数抽象到配置文件(例如yaml文件或其他文件)中?您能否举例说明如何做到这一点?提前谢谢你。 最佳答案 首先,您可以运行一个写入YAML配置文件的独立脚本:require"yaml"File.write("path_to_yaml_file",[arg1,arg2].to_yaml)然后,在您的应用中阅读它:require"yaml"arg
我已经在Sinatra上创建了应用程序,它代表了一个简单的API。我想在生产和开发上进行部署。我想在部署时选择,是开发还是生产,一些方法的逻辑应该改变,这取决于部署类型。是否有任何想法,如何完成以及解决此问题的一些示例。例子:我有代码get'/api/test'doreturn"Itisdev"end但是在部署到生产环境之后我想在运行/api/test之后看到ItisPROD如何实现? 最佳答案 根据SinatraDocumentation:EnvironmentscanbesetthroughtheRACK_ENVenvironm
在应用开发中,有时候我们需要获取系统的设备信息,用于数据上报和行为分析。那在鸿蒙系统中,我们应该怎么去获取设备的系统信息呢,比如说获取手机的系统版本号、手机的制造商、手机型号等数据。1、获取方式这里分为两种情况,一种是设备信息的获取,一种是系统信息的获取。1.1、获取设备信息获取设备信息,鸿蒙的SDK包为我们提供了DeviceInfo类,通过该类的一些静态方法,可以获取设备信息,DeviceInfo类的包路径为:ohos.system.DeviceInfo.具体的方法如下:ModifierandTypeMethodDescriptionstatic StringgetAbiList()Obt
之前在培训新生的时候,windows环境下配置opencv环境一直教的都是网上主流的vsstudio配置属性表,但是这个似乎对新生来说难度略高(虽然个人觉得完全是他们自己的问题),加之暑假之后对cmake实在是爱不释手,且这样配置确实十分简单(其实都不需要配置),故斗胆妄言vscode下配置CV之法。其实极为简单,图比较多所以很长。如果你看此文还配不好,你应该思考一下是不是自己的问题。闲话少说,直接开始。0.CMkae简介有的人到大二了都不知道cmake是什么,我不说是谁。CMake是一个开源免费并且跨平台的构建工具,可以用简单的语句来描述所有平台的编译过程。它能够根据当前所在平台输出对应的m
文章目录1.开发板选择*用到的资源2.串口通信(个人理解)3.代码分析(注释比较详细)1.主函数2.串口1配置3.串口2配置以及中断函数4.注意问题5.源码链接1.开发板选择我用的是STM32F103RCT6的板子,不过代码大概在F103系列的板子上都可以运行,我试过在野火103的霸道板上也可以,主要看一下串口对应的引脚一不一样就行了,不一样的就更改一下。*用到的资源keil5软件这里用到了两个串口资源,采集数据一个,串口通信一个,板子对应引脚如下:串口1,TX:PA9,RX:PA10串口2,TX:PA2,RX:PA32.串口通信(个人理解)我就从串口采集传感器数据这个过程说一下我自己的理解,
注意:本文主要掌握DCN自研无线产品的基本配置方法和注意事项,能够进行一般的项目实施、调试与运维AP基本配置命令AP登录用户名和密码均为:adminAP默认IP地址为:192.168.1.10AP默认情况下DHCP开启AP静态地址配置:setmanagementstatic-ip192.168.10.1AP开启/关闭DHCP功能:setmanagementdhcp-statusup/downAP设置默认网关:setstatic-ip-routegeteway192.168.10.254查看AP基本信息:getsystemgetmanagementgetmanaged-apgetrouteAP配
作为新的阿里云用户,您可以50免费试用多种优惠,价值高达1,700美元(或8,500美元)。这将让您了解和体验阿里云平台上提供的一系列产品和服务。如果您以个人身份注册免费试用,您将获得价值1,700美元的优惠。但是,如果您是注册公司,您可以选择企业免费试用,提交基本信息通过企业实名注册验证,即可开始价值$8,500的免费试用!本教程介绍了如何设置您的帐户并使用您的免费试用版。关于免费试用在我们开始此试用之前,您还必须遵守以下条款和条件才能访问您的免费试用:只有在一年内创建的账户才有资格获得阿里云免费试用。通过此免费试用优惠,用户可以免费试用免费试用活动页面上列出的每种产品一次。如果您有多个帐
1.1.1 YARN的介绍 为克服Hadoop1.0中HDFS和MapReduce存在的各种问题⽽提出的,针对Hadoop1.0中的MapReduce在扩展性和多框架⽀持⽅⾯的不⾜,提出了全新的资源管理框架YARN. ApacheYARN(YetanotherResourceNegotiator的缩写)是Hadoop集群的资源管理系统,负责为计算程序提供服务器计算资源,相当于⼀个分布式的操作系统平台,⽽MapReduce等计算程序则相当于运⾏于操作系统之上的应⽤程序。 YARN被引⼊Hadoop2,最初是为了改善MapReduce的实现,但是因为具有⾜够的通⽤性,同样可以⽀持其他的分布式计算模
我是ruby的新手,正在配置IRB。我喜欢pretty-print(需要'pp'),但总是输入pp来漂亮地打印它似乎很麻烦。我想做的是默认情况下让它漂亮地打印出来,所以如果我有一个var,比如说,'myvar',然后键入myvar,它会自动调用pretty_inspect而不是常规检查。我从哪里开始?理想情况下,我将能够向我的.irbrc文件添加一个自动调用的方法。有什么想法吗?谢谢! 最佳答案 irb中默认pretty-print对象正是hirb被迫去做。Theseposts解释hirb如何将几乎所有内容转换为ascii表。虽