3D点云的姿态估计有时可以看作是点云配准的过程,其实就是计算场景点云Ps和模版点云Pm之间的位姿变换关系。这种变换一般都是刚性变换,包含平移和旋转。目前最常用的是采用两阶段的算法来进行位姿的精确估计。第一阶段,采用SAI-IA算法进行位姿粗估计,第二阶段,采用ICP迭代优化位姿,进行精确的位姿估计。
常见的特征描述子:FPFH,SHOT,3DSC具体实现就不写了,后期有时间的话慢慢补上。
这里详细讲一下特征描述子的作用。
首先举个例子,现在你家里人叫你去相亲,但是他们没有女方A的照片,为了防止你认错人,见过她的人给你描述了一番她的体型和长相:黑熊般一身粗肉,铁牛似遍体顽皮(体型),交加一字赤黄眉,双眼赤丝乱系,怒发浑如铁刷,狰狞好似狻猊(长相)。记下这些描述之后,你屁颠屁颠地跑去相亲,到了地方,发现有很多人,所以你把所有人的体型和长相都描述了一番,然后发现有个人的描述和见过A的人的描述很相似,所以你就可以认为她就是女方A了。
我们把这个过程类比到点云特征描述中,现在计算机对模版点云Pm中某一点A按照一定的规则(体型,长相)进行了特征描述(一般是一个一维的向量),然后采用同样的方法对场景点云Ps中的所有点进行了描述,这样给每个点都生成了一个特征描述向量(与A的描述向量长度相同)。接下来就是找哪个点和A的特征描述向量最接近了,很自然地想到,就是计算两个向量之间的差距呗,如何计算呢?最简单的就是求两个向量之间的欧氏距离,也就是两个向量相减然后求平方和。所有的距离中,对应最小距离的那个点或者距离小于一定阈值的点就是场景点云中对应点A的点了。
说到这,应该理解点云特征描述的作用了。但是你还可能会产生如下的问题:
1.如果所有点的距离都很大怎么办?
答:那就说明不存在对应的点
2.如果有很多点距离都很小怎么办?
答:那就说明你的描述不够详细,无法通过给出的这些条件筛选出正确的点。相当于你去了相亲的地方,发现很多人都满足“黑熊般一身粗肉,铁牛似遍体顽皮,交加一字赤黄眉,双眼赤丝乱系,怒发浑如铁刷,狰狞好似狻猊。”那应该咋办呢?很简单,打电话给见过A的人,叫她再对A从别的角度描述几句,直到你可以认出A。
3.为什么要非要描述,不能直接给照片吗?
答:因为在三维的点云空间中,这些点只具备空间位置属性,很难直接配对,生成特征描述相当于将他们提升到了高维空间,在高维空间中他们会和很接近,更加容易配对。
SAI-IA(采样一致性初始配准算法)的核心思想:
(1) 从待配准点云P中选取n个采样点,为了尽量保证所采样的点具有不同的FPFH特征,采样点两两之间的距离应满足大于预先给定最小距离阈值d。
(2) 在目标点云Q中查找与点云P中采样点具有相似FPFH特征的一个或多个点,从这些相似点中随机选取一个点作为点云P在目标点云Q中的一一对应点。
(3) 计算对应点之间刚体变换矩阵, 然后通过求解对应点变换后的“距离误差和”函数来判断当前配准变换的性能。此处的距离误差和函数多使用Huber罚函数表示。te为设定的阈值。
迭代最近点算法(Iterative Cloest Point, ICP)
ICP算法基于SVD,其大致思路如下:
(1) 将初始配准后的两片点云P′(经过坐标变换后的源点云)和Q,作为精配准的初始点集;
(2) 对源点云P’中的每一点pi,在目标点云Q中寻找距离最近的对应点qi,作为该点在目标点云中的对应点,组成初始对应点对;
(3) 初始对应点集中的对应关系并不都是正确的,错误的对应关系会影响最终的配准结果,采用方向向量阈值剔除错误的对应点对;
(4) 计算旋转矩阵R和平移向量T,使最小,即对应点集之间的均方误差最小;
(5) 设定某一阈值ε=dk-dk-1和最大迭代次数Nmax, 将上一步得到的刚体变换作用于源点云P′,得到新点云P”,计算P”和Q的距离误差,,如果两次迭代的误差小于阈值ε或者当前迭代次数大于Nmax,则迭代结束,否则将初始配准的点集更新为P”和Q,继续重复上述步骤,直至满足收敛条件
在两点云相差较大的情况下,ICP算法容易陷入局部最优解,从而无法得到较好的匹配结果,故需要先给定一个初始变换矩阵,一般由SAI-IA确定。
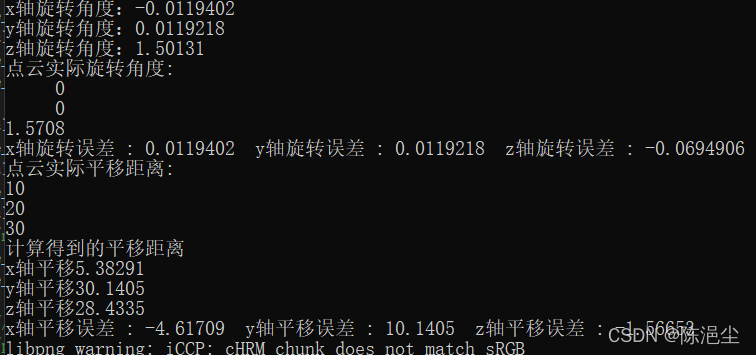
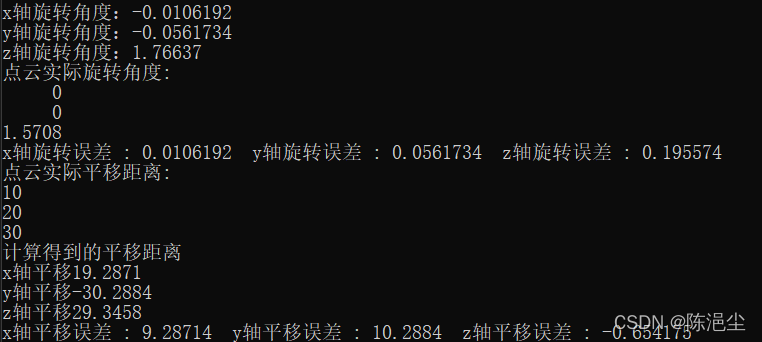
为了定量地分析算法的效果,使用PCL对点云进行一个给定的变换。将点云沿着XYZ轴分别平移10mm、20mm和30mm,并绕Z轴旋转90°。这个变换对应的变换矩阵为:
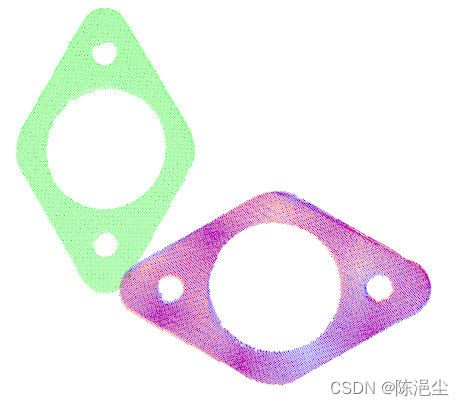
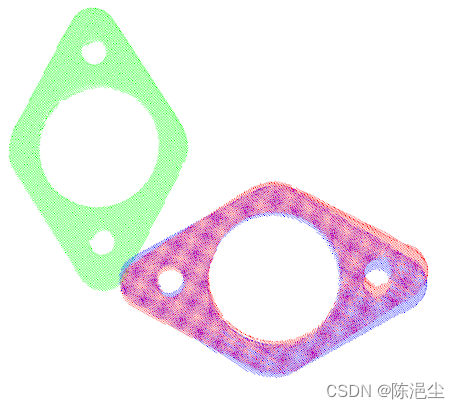
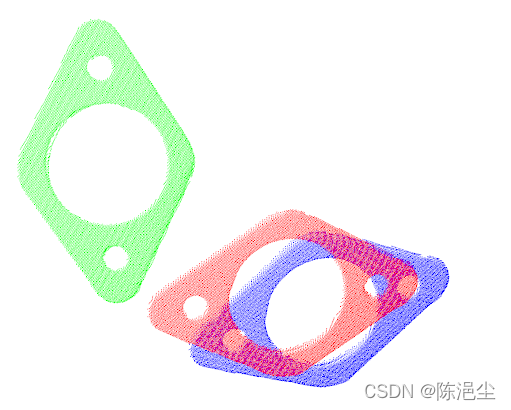
绿色为原始点云,红色为进行位姿变化之后的点云,蓝色为采用位姿估计矩阵对原始点云进行变化的结果,可见效果还是很好滴。
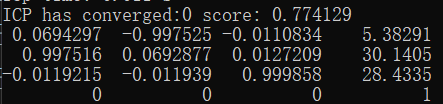
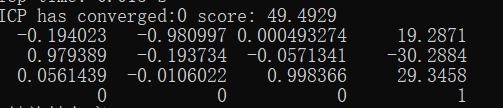
变换矩阵结果:
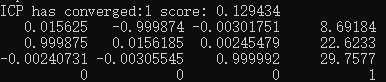
误差:
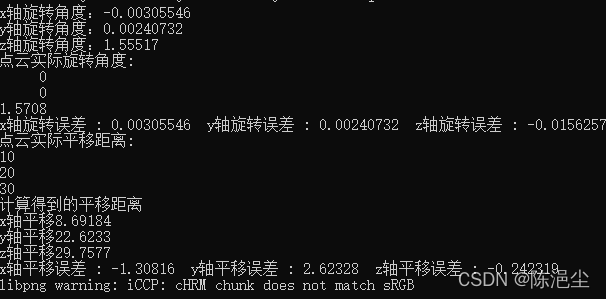
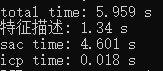
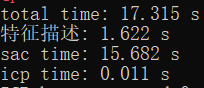
运行时间:
变换矩阵结果:
误差:
运行时间:
变换矩阵结果:
误差:
运行时间:
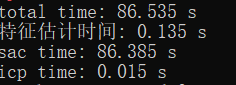
从上述计算结果可以看出:
耗时:FPFH<SHOT<3Dsc
误差:FPFH<3Dsc<SHOT
代码后续大家点个赞有需要再附上吧。
我有一个用户工厂。我希望默认情况下确认用户。但是鉴于unconfirmed特征,我不希望它们被确认。虽然我有一个基于实现细节而不是抽象的工作实现,但我想知道如何正确地做到这一点。factory:userdoafter(:create)do|user,evaluator|#unwantedimplementationdetailshereunlessFactoryGirl.factories[:user].defined_traits.map(&:name).include?(:unconfirmed)user.confirm!endendtrait:unconfirmeddoenden
无论您是想搭建桌面端、WEB端或者移动端APP应用,HOOPSPlatform组件都可以为您提供弹性的3D集成架构,同时,由工业领域3D技术专家组成的HOOPS技术团队也能为您提供技术支持服务。如果您的客户期望有一种在多个平台(桌面/WEB/APP,而且某些客户端是“瘦”客户端)快速、方便地将数据接入到3D应用系统的解决方案,并且当访问数据时,在各个平台上的性能和用户体验保持一致,HOOPSPlatform将帮助您完成。利用HOOPSPlatform,您可以开发在任何环境下的3D基础应用架构。HOOPSPlatform可以帮您打造3D创新型产品,HOOPSSDK包含的技术有:快速且准确的CAD
华为OD机试题本篇题目:明明的随机数题目输入描述输出描述:示例1输入输出说明代码编写思路最近更新的博客华为od2023|什么是华为od,od薪资待遇,od机试题清单华为OD机试真题大全,用Python解华为机试题|机试宝典【华为OD机试】全流程解析+经验分享,题型分享,防作弊指南华为o
本教程将在Unity3D中混合Optitrack与数据手套的数据流,在人体运动的基础上,添加双手手指部分的运动。双手手背的角度仍由Optitrack提供,数据手套提供双手手指的角度。 01 客户端软件分别安装MotiveBody与MotionVenus并校准人体与数据手套。MotiveBodyMotionVenus数据手套使用、校准流程参照:https://gitee.com/foheart_1/foheart-h1-data-summary.git02 数据转发打开MotiveBody软件的Streaming,开始向Unity3D广播数据;MotionVenus中设置->选项选择Unit
这篇文章是继上一篇文章“Observability:从零开始创建Java微服务并监控它(一)”的续篇。在上一篇文章中,我们讲述了如何创建一个Javaweb应用,并使用Filebeat来收集应用所生成的日志。在今天的文章中,我来详述如何收集应用的指标,使用APM来监控应用并监督web服务的在线情况。源码可以在地址 https://github.com/liu-xiao-guo/java_observability 进行下载。摄入指标指标被视为可以随时更改的时间点值。当前请求的数量可以改变任何毫秒。你可能有1000个请求的峰值,然后一切都回到一个请求。这也意味着这些指标可能不准确,你还想提取最小/
Unity自动旋转动画1.开门需要门把手先动,门再动2.关门需要门先动,门把手再动3.中途播放过程中不可以再次进行操作觉得太复杂?查看我的文章开关门简易进阶版效果:如果这个门可以直接打开的话,就不需要放置"门把手"如果门把手还有钥匙需要旋转,那就可以把钥匙放在门把手的"门把手",理论上是可以无限套娃的可调整参数有:角度,反向,轴向,速度运行时点击Test进行测试自己写的代码比较垃圾,命名与结构比较拉,高手轻点喷,新手有类似的需求可以拿去做参考上代码usingSystem.Collections;usingSystem.Collections.Generic;usingUnityEngine;u
之前说过10之后的版本没有3dScan了,所以还是9.8的版本或者之前更早的版本。 3d物体扫描需要先下载扫描的APK进行扫面。首先要在手机上装一个扫描程序,扫描现实中的三维物体,然后上传高通官网,在下载成UnityPackage类型让Unity能够使用这个扫描程序可以从高通官网上进行下载,是一个安卓程序。点到Tools往下滑,找到VuforiaObjectScanner下载后解压数据线连接手机,将apk文件拷入手机安装然后刚才解压文件中的Media文件夹打开,两个PDF图打印第一张A4-ObjectScanningTarget.pdf,主要是用来辅助扫描的。好了,接下来就是扫描三维物体。将瓶
C#实现简易绘图工具一.引言实验目的:通过制作窗体应用程序(C#画图软件),熟悉基本的窗体设计过程以及控件设计,事件处理等,熟悉使用C#的winform窗体进行绘图的基本步骤,对于面向对象编程有更加深刻的体会.Tutorial任务设计一个具有基本功能的画图软件**·包括简单的新建文件,保存,重新绘图等功能**·实现一些基本图形的绘制,包括铅笔和基本形状等,学习橡皮工具的创建**·设计一个合理舒适的UI界面**注明:你可能需要先了解一些关于winform窗体应用程序绘图的基本知识,以及关于GDI+类和结构的知识二.实验环境Windows系统下的visualstudio2017C#窗体应用程序三.
MIMO技术的优缺点优点通过下面三个增益来总体概括:阵列增益。阵列增益是指由于接收机通过对接收信号的相干合并而活得的平均SNR的提高。在发射机不知道信道信息的情况下,MIMO系统可以获得的阵列增益与接收天线数成正比复用增益。在采用空间复用方案的MIMO系统中,可以获得复用增益,即信道容量成倍增加。信道容量的增加与min(Nt,Nr)成正比分集增益。在采用空间分集方案的MIMO系统中,可以获得分集增益,即可靠性性能的改善。分集增益用独立衰落支路数来描述,即分集指数。在使用了空时编码的MIMO系统中,由于接收天线或发射天线之间的间距较远,可认为它们各自的大尺度衰落是相互独立的,因此分布式MIMO
遍历文件夹我们通常是使用递归进行操作,这种方式比较简单,也比较容易理解。本文为大家介绍另一种不使用递归的方式,由于没有使用递归,只用到了循环和集合,所以效率更高一些!一、使用递归遍历文件夹整体思路1、使用File封装初始目录,2、打印这个目录3、获取这个目录下所有的子文件和子目录的数组。4、遍历这个数组,取出每个File对象4-1、如果File是否是一个文件,打印4-2、否则就是一个目录,递归调用代码实现publicclassSearchFile{publicstaticvoidmain(String[]args){//初始目录Filedir=newFile("d:/Dev");Datebeg