目录
参考博客:
1、利用STM32F103精确控制步进电机_jl_mlh的博客-CSDN博客_stm32控制步进电机;
2、图文介绍步进电机的满步、半步、微步驱动原理-深圳东么川伺服控制有限公司;
3、【STM32】stm32驱动TB6600控制42/57步进电机的案例(TIM中断和PWM实验)_创客协会的阿蛋°的博客-CSDN博客_stm32驱动42步进电机程序;
4、STM32之TIM定时器驱动42步进电机-驱动器型号TB6600_为丽力的博客-CSDN博客_stm32驱动42步进电机;
参考论文:
1、侯艳霞. 混合式步进电机工作原理及其PLC控制;
完成步进电机的正转(不通过串口控制、非可移动供电)。
某宝店家提供资料如下: 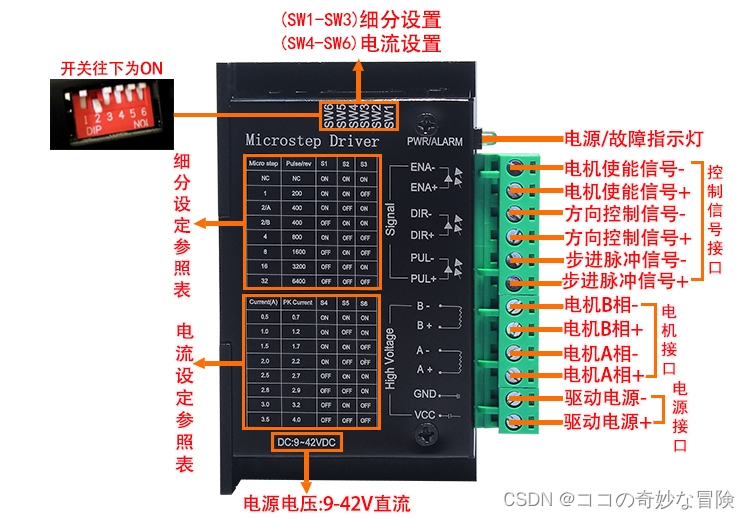



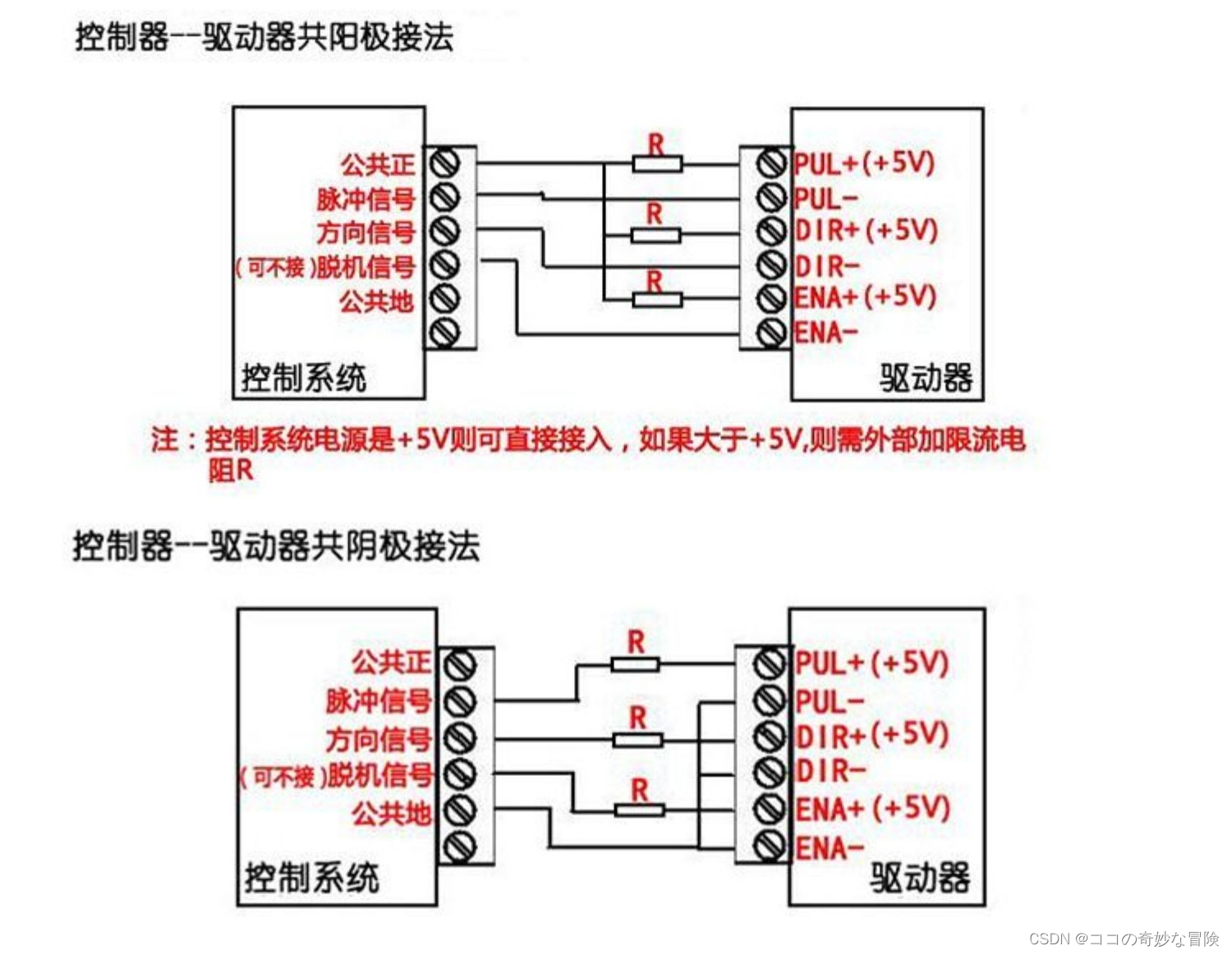
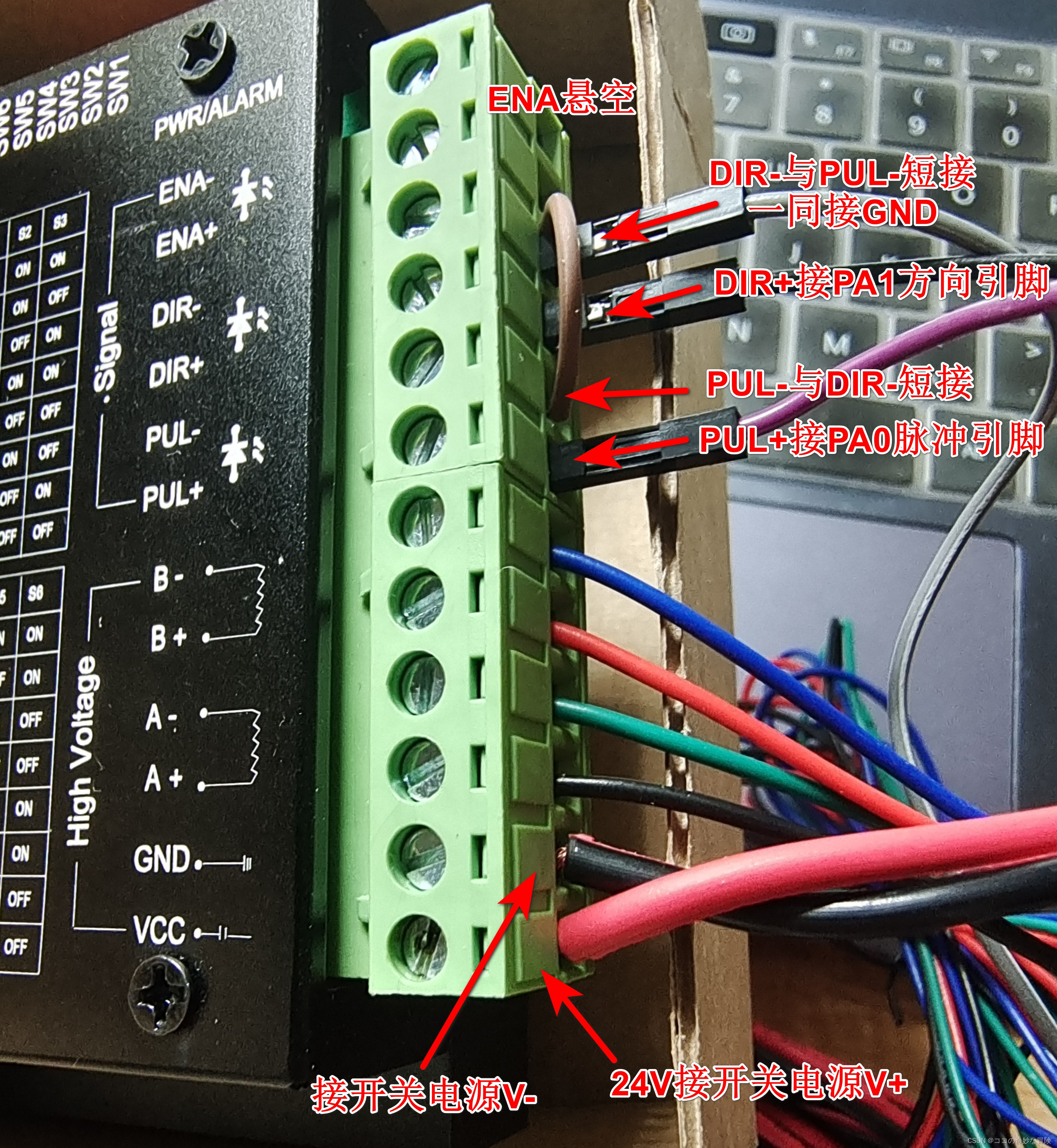
共阴:
驱动器 —— stm32
DIR- 与 PUL- —— GND
DIR+ —— 方向引脚
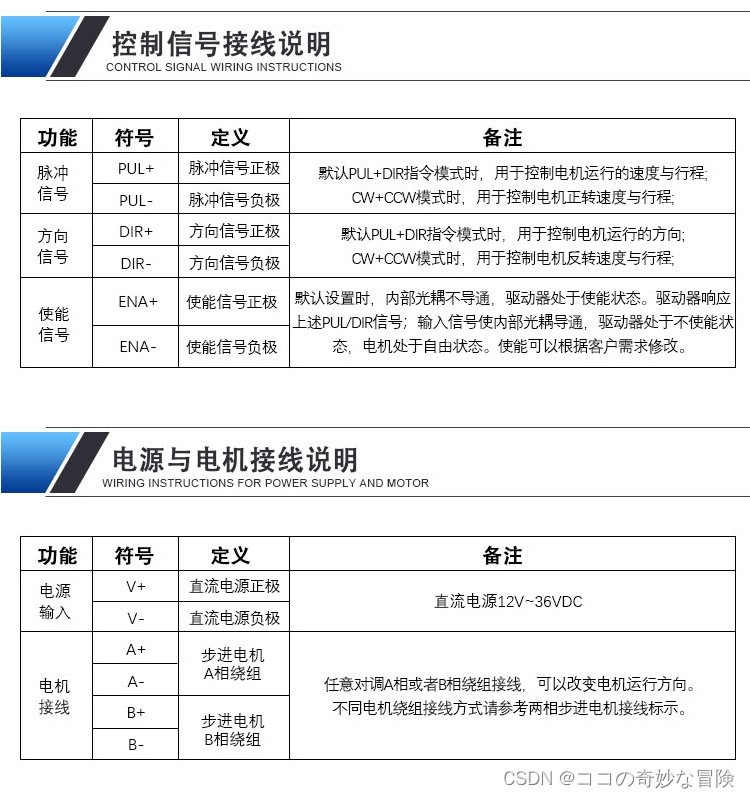
PUL+ —— 脉冲引脚共阳:
驱动器 —— stm32
DIR+ 与 PUL+ —— +5V
DIR- —— 方向引脚
PUL- —— 脉冲引脚

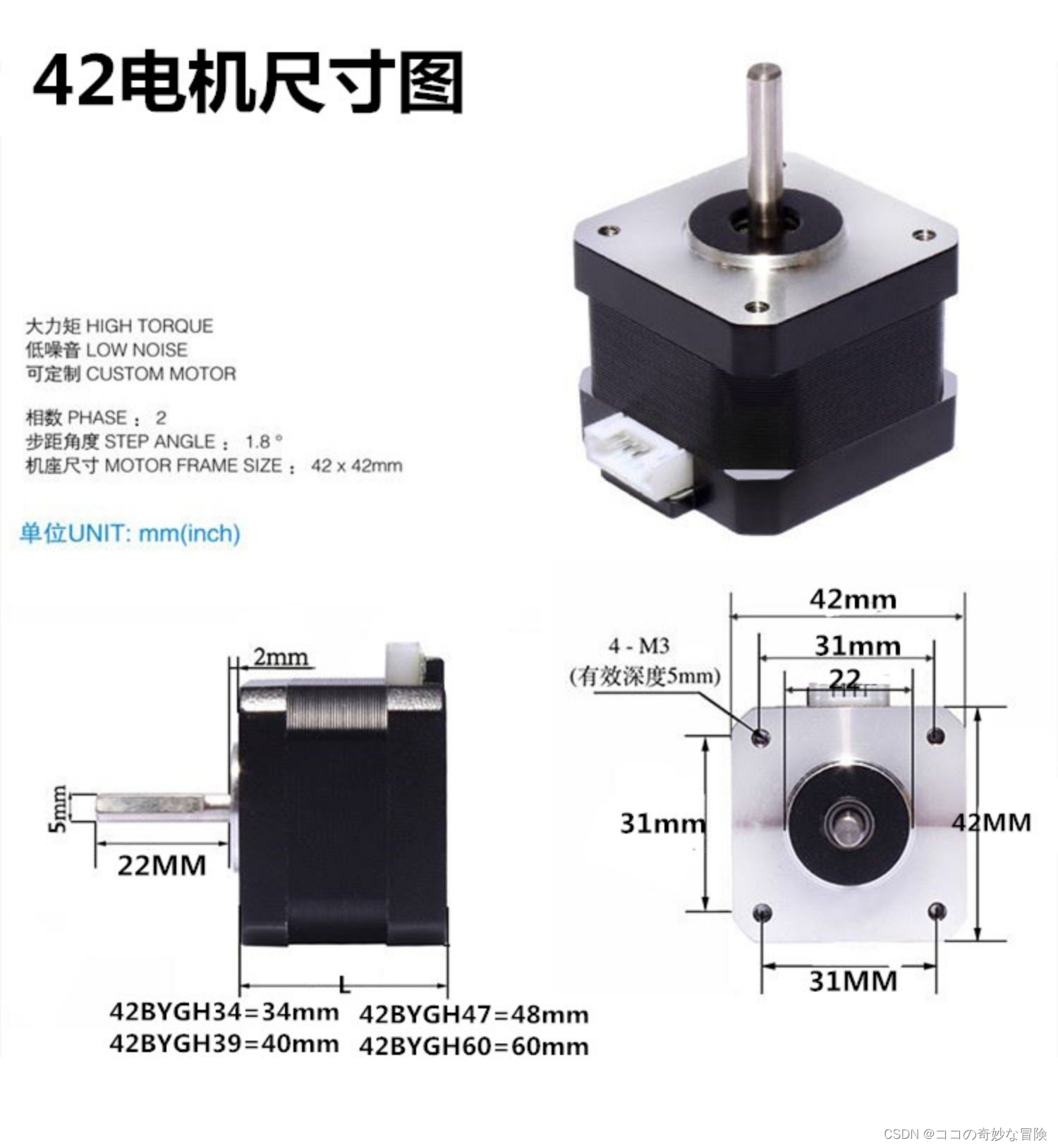
由商家提供资料可知:42步进电机的相数为2(A、B两相,每相并联支路数为2,每条支路串联2个线圈)、步距角为1.8°(满步时)、转子齿数为50。
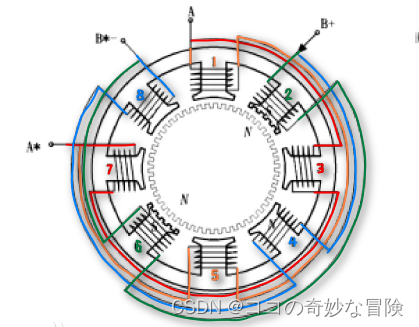
每拍只有一相绕组通电,四拍构成一个循环。上图中,定子的B相通电,磁极2的5个齿与转子齿对齿(如下图4),由分析可知,磁极6也同转子齿对齿,而磁极4和8是齿对槽(如下图2)。旁边的A相绕组的磁极3的5个齿和转子齿有1/4齿距的错位(如下图3),即1.8°(360°/50/4)。

当B相断电A相通电时,磁极3产生N极性,吸合离它最近的S极转子齿,使得转子沿顺时针方向转过1.8°,实现磁极3和转子齿对齿,此时磁极4和转子齿有1/4齿距的错位。
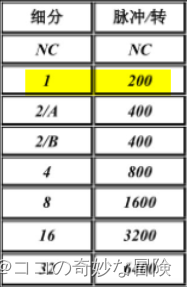
依次类推若继续按四拍的顺序通电,转子就按顺时针方向一步一步地转动,每通电一次(即每来一个脉冲)转子转过1.8°,即称步距角为1.8°,转子转过一圈需要360°/1.8° =200个脉冲。与表相符。
【参数及公式可参阅文章:利用STM32F103精确控制步进电机_jl_mlh的博客-CSDN博客】
① 拍数(N=km)——每一次循环所包含的通电状态数(电机转过一个齿距角所需脉冲数);
单拍制(k=1)——拍数 = 相数;双拍制(k=2)——拍数 = 相数的两倍;② 相数(m)——即电机内部的线圈组数。如果使用细分驱动器,则相数将变得没有意义,只需在驱动器上改变细分数,就可以改变步距角;
③ 转子齿数(Zr);
④ 步距角(θs)——步进机通过一个电脉冲转子转过的角度;
⑤ 转速(n)
电机的转速与脉冲频率成正比,电机转过的角度与脉冲数成正比。所以控制脉冲数和脉冲频率就可以精确调速。
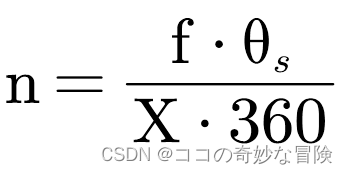
f:脉冲频率;θs:步距角;X:细分值;n:转速(rad/s)。
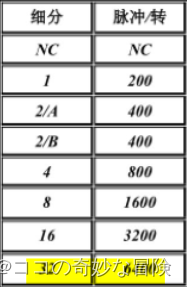
若已知步距角=1.8°,细分值=32,想要达到1rad/s的转速(每秒转一圈),则脉冲频率=1*32*360/1.8=6400,即6400个脉冲为一转,与所给表相符合。
【该部分摘自文章:图文介绍步进电机的满步、半步、微步驱动原理】
满步驱动(单拍满步驱动和双拍满步驱动 ):
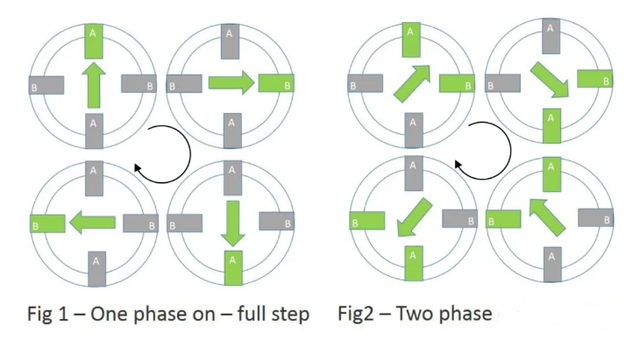
半步驱动:

半步驱动的好处是提高分辨率,但是缺点是扭矩只有满步驱动的70%,当然,也可以通过优化线圈中电流大小,来提高半步驱动扭矩。
微步驱动:
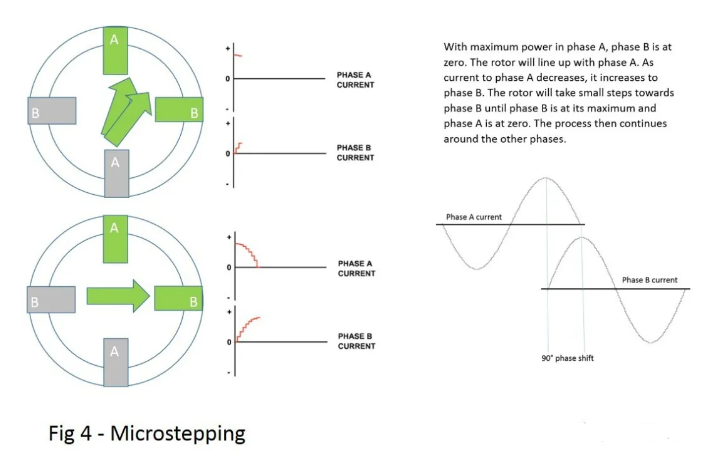
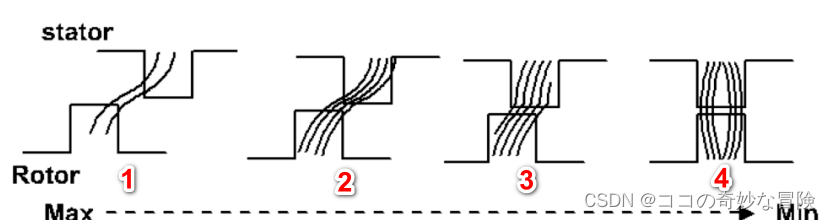
图上英文为:With maximum power in phase A, phase B is at zero. The rotor will line up with phase A. As current to phase A decreases, it increases to phase B. The rotor will take small steps towards phase B until phase B is at its maximum and phase A is at zero. The process then continues around the other phases.
翻译过来大致意思就是:A线圈开始有最大电流,B线圈电流为0,转子指向A线圈。如果A线圈电流慢慢减小,B线圈电流慢慢增大,转子就会慢慢的转向B线圈。
宏观来看,A、B线圈的电流变化都接近于三角函数曲线。电流每一步变化的大小,则决定了微步运动的大小。虽然步数越多,运动越平滑,但是扭矩也会相应的减小。

电流每一步的变化的大小,决定了微步运动的大小,右上图为1/4,1/8,1/16微步电流变化示意图。

微步运动举例:在图1中,A线圈通满电流,图2中A线圈通最大电流的0.92倍,而B线圈通最大电流的0.38倍,实现22.5°旋转。同理,图3中,A和B线圈同时通最大电流的0.71倍,可以实现45°旋转。
步数越多,可以获得越平滑的运动,噪声也越小,不容易失步(丢步),但是代价就是扭矩大大减小。
【基础配置见【STM32】1—零基础硬件软件配置 & 完成LED的闪烁_ココの奇妙な冒険的博客-CSDN博客_stm32配置软件】
原理图:



其输出引脚为PA0。
因希望其正转,则将电平拉高:
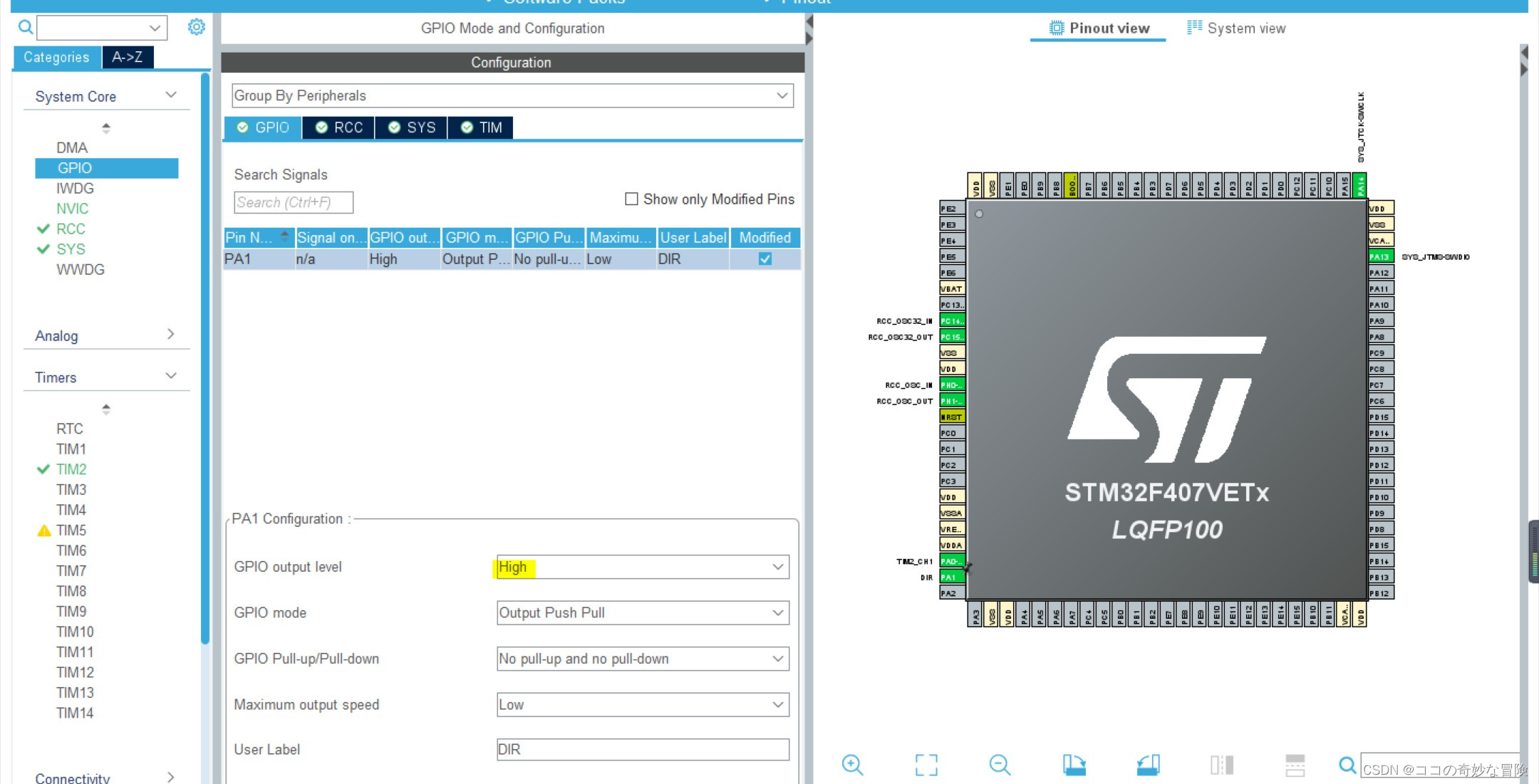
采用共阴接法:
相关见2.1.1
【代码参考博客STM32之TIM定时器驱动42步进电机-驱动器型号TB6600_stm32驱动42步进电机】
在自动生成代码的基础上需在main.c中增加:
定义变量:
int count;开启PWM中断并拉高引脚(后者可省去):
HAL_TIM_PWM_Start_IT(&htim2,TIM_CHANNEL_1);
HAL_GPIO_WritePin(DIR_GPIO_Port, DIR_Pin, GPIO_PIN_SET); 计数1000次后停转:
void HAL_TIM_PWM_PulseFinishedCallback(TIM_HandleTypeDef *htim)
{
if(htim == &htim2)
{
if(count <1000)
{
count++;
}
else
{
HAL_TIM_PWM_Stop_IT(&htim2, TIM_CHANNEL_1);
count = 0;
}
}
}
总代码如下:
main.c:
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2022 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "tim.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
int count;
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_TIM2_Init();
/* USER CODE BEGIN 2 */
HAL_TIM_PWM_Start_IT(&htim2,TIM_CHANNEL_1);
HAL_GPIO_WritePin(DIR_GPIO_Port, DIR_Pin, GPIO_PIN_SET);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI;
RCC_OscInitStruct.PLL.PLLM = 8;
RCC_OscInitStruct.PLL.PLLN = 168;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 4;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_5) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
void HAL_TIM_PWM_PulseFinishedCallback(TIM_HandleTypeDef *htim)
{
if(htim == &htim2)
{
if(count <1000)
{
count++;
}
else
{
HAL_TIM_PWM_Stop_IT(&htim2, TIM_CHANNEL_1);
count = 0;
}
}
}
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
gpio.c:
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file gpio.c
* @brief This file provides code for the configuration
* of all used GPIO pins.
******************************************************************************
* @attention
*
* Copyright (c) 2022 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "gpio.h"
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/*----------------------------------------------------------------------------*/
/* Configure GPIO */
/*----------------------------------------------------------------------------*/
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/** Configure pins as
* Analog
* Input
* Output
* EVENT_OUT
* EXTI
*/
void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOC_CLK_ENABLE();
__HAL_RCC_GPIOH_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(DIR_GPIO_Port, DIR_Pin, GPIO_PIN_SET);
/*Configure GPIO pin : PtPin */
GPIO_InitStruct.Pin = DIR_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(DIR_GPIO_Port, &GPIO_InitStruct);
}
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
tim.c:
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file tim.c
* @brief This file provides code for the configuration
* of the TIM instances.
******************************************************************************
* @attention
*
* Copyright (c) 2022 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "tim.h"
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
TIM_HandleTypeDef htim2;
/* TIM2 init function */
void MX_TIM2_Init(void)
{
/* USER CODE BEGIN TIM2_Init 0 */
/* USER CODE END TIM2_Init 0 */
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_OC_InitTypeDef sConfigOC = {0};
/* USER CODE BEGIN TIM2_Init 1 */
/* USER CODE END TIM2_Init 1 */
htim2.Instance = TIM2;
htim2.Init.Prescaler = 83;
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = 999;
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE;
if (HAL_TIM_Base_Init(&htim2) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim2, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_PWM_Init(&htim2) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 500;
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
if (HAL_TIM_PWM_ConfigChannel(&htim2, &sConfigOC, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM2_Init 2 */
/* USER CODE END TIM2_Init 2 */
HAL_TIM_MspPostInit(&htim2);
}
void HAL_TIM_Base_MspInit(TIM_HandleTypeDef* tim_baseHandle)
{
if(tim_baseHandle->Instance==TIM2)
{
/* USER CODE BEGIN TIM2_MspInit 0 */
/* USER CODE END TIM2_MspInit 0 */
/* TIM2 clock enable */
__HAL_RCC_TIM2_CLK_ENABLE();
/* TIM2 interrupt Init */
HAL_NVIC_SetPriority(TIM2_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(TIM2_IRQn);
/* USER CODE BEGIN TIM2_MspInit 1 */
/* USER CODE END TIM2_MspInit 1 */
}
}
void HAL_TIM_MspPostInit(TIM_HandleTypeDef* timHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(timHandle->Instance==TIM2)
{
/* USER CODE BEGIN TIM2_MspPostInit 0 */
/* USER CODE END TIM2_MspPostInit 0 */
__HAL_RCC_GPIOA_CLK_ENABLE();
/**TIM2 GPIO Configuration
PA0-WKUP ------> TIM2_CH1
*/
GPIO_InitStruct.Pin = GPIO_PIN_0;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
GPIO_InitStruct.Alternate = GPIO_AF1_TIM2;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* USER CODE BEGIN TIM2_MspPostInit 1 */
/* USER CODE END TIM2_MspPostInit 1 */
}
}
void HAL_TIM_Base_MspDeInit(TIM_HandleTypeDef* tim_baseHandle)
{
if(tim_baseHandle->Instance==TIM2)
{
/* USER CODE BEGIN TIM2_MspDeInit 0 */
/* USER CODE END TIM2_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_TIM2_CLK_DISABLE();
/* TIM2 interrupt Deinit */
HAL_NVIC_DisableIRQ(TIM2_IRQn);
/* USER CODE BEGIN TIM2_MspDeInit 1 */
/* USER CODE END TIM2_MspDeInit 1 */
}
}
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
42步进电机的转动
某宝店家提供资料如下:



我正在使用Rails3.1并在一个论坛上工作。我有一个名为Topic的模型,每个模型都有许多Post。当用户创建新主题时,他们也应该创建第一个Post。但是,我不确定如何以相同的形式执行此操作。这是我的代码:classTopic:destroyaccepts_nested_attributes_for:postsvalidates_presence_of:titleendclassPost...但这似乎不起作用。有什么想法吗?谢谢! 最佳答案 @Pablo的回答似乎有你需要的一切。但更具体地说...首先改变你View中的这一行对此#
按照目前的情况,这个问题不适合我们的问答形式。我们希望答案得到事实、引用或专业知识的支持,但这个问题可能会引发辩论、争论、投票或扩展讨论。如果您觉得这个问题可以改进并可能重新打开,visitthehelpcenter指导。关闭10年前。问题1)我想知道rubyonrails是否有功能类似于primefaces的gem。我问的原因是如果您使用primefaces(http://www.primefaces.org/showcase-labs/ui/home.jsf),开发人员无需担心javascript或jquery的东西。据我所知,JSF是一个规范,基于规范的各种可用实现,prim
本教程将在Unity3D中混合Optitrack与数据手套的数据流,在人体运动的基础上,添加双手手指部分的运动。双手手背的角度仍由Optitrack提供,数据手套提供双手手指的角度。 01 客户端软件分别安装MotiveBody与MotionVenus并校准人体与数据手套。MotiveBodyMotionVenus数据手套使用、校准流程参照:https://gitee.com/foheart_1/foheart-h1-data-summary.git02 数据转发打开MotiveBody软件的Streaming,开始向Unity3D广播数据;MotionVenus中设置->选项选择Unit
文章目录1.开发板选择*用到的资源2.串口通信(个人理解)3.代码分析(注释比较详细)1.主函数2.串口1配置3.串口2配置以及中断函数4.注意问题5.源码链接1.开发板选择我用的是STM32F103RCT6的板子,不过代码大概在F103系列的板子上都可以运行,我试过在野火103的霸道板上也可以,主要看一下串口对应的引脚一不一样就行了,不一样的就更改一下。*用到的资源keil5软件这里用到了两个串口资源,采集数据一个,串口通信一个,板子对应引脚如下:串口1,TX:PA9,RX:PA10串口2,TX:PA2,RX:PA32.串口通信(个人理解)我就从串口采集传感器数据这个过程说一下我自己的理解,
使用rspec-rails3.0+,测试设置分为spec_helper和rails_helper我注意到生成的spec_helper不需要'rspec/rails'。这会导致zeus崩溃:spec_helper.rb:5:in`':undefinedmethod`configure'forRSpec:Module(NoMethodError)对thisissue最常见的回应是需要'rspec/rails'。但这是否会破坏仅使用spec_helper拆分rails规范和PORO规范的全部目的?或者这无关紧要,因为Zeus无论如何都会预加载Rails?我应该在我的spec_helper中做
LL库和HAL库简介LL:Low-Layer,底层库HAL:HardwareAbstractionLayer,硬件抽象层库LL库和hal库对比,很精简,这实际上是一个精简的库。LL库的配置选择如下:在STM32CUBEMX中,点击菜单的“ProjectManager”–>“AdvancedSettings”,在下面的界面中选择“AdvancedSettings”,然后在每个模块后面选择使用的库总结:1、如果使用的MCU是小容量的,那么STM32CubeLL将是最佳选择;2、如果结合可移植性和优化,使用STM32CubeHAL并使用特定的优化实现替换一些调用,可保持最大的可移植性。另外HAL和L
我以为它已经安装了,但在我的gemfile中有gem"jquery-rails"但是在我的asset/javascripts文件夹中accounts.js.coffeeapplication.js都被注释掉了这是我的虚拟railsapplication但是在源代码中没有jQuery并且删除链接不起作用......任何想法都丢失了 最佳答案 看看thisRailscast.您可能需要检查application.js文件并确保它包含以下语句。//=requirejquery//=requirejquery_ujs
我使用的是最新版本的Chrome(32.0.1700.107)和Chrome驱动程序(V2.8)。但是当我在Ruby中使用以下代码运行示例测试时:require'selenium-webdriver'WAIT=Selenium::WebDriver::Wait.new(timeout:100)$driver=Selenium::WebDriver.for:chrome$driver.manage.window.maximize$driver.navigate.to'https://www.google.co.in'defapps_hoverele_hover=$driver.find_
已修复。Rails中有一个错误。参见https://github.com/rails/rails/issues/2333我对FactoryGirlRails和Rails3.1.0.rc5有疑问当我多次执行user=FactoryGirl.create(:user)时出现错误。Failure/Error:user=FactoryGirl.create(:user)NameError:uninitializedconstantUser::User#./app/models/user.rb:17:in`generate_token'#./app/models/user.rb:4:in`blo
按照目前的情况,这个问题不适合我们的问答形式。我们希望答案得到事实、引用或专业知识的支持,但这个问题可能会引发辩论、争论、投票或扩展讨论。如果您觉得这个问题可以改进并可能重新打开,visitthehelpcenter指导。关闭9年前。多年来,我一直在使用多种语言进行编程,并且认为自己总体上相当擅长。但是,我从未编写过任何自动化测试:没有单元测试,没有TDD,没有BDD,什么都没有。我已经尝试开始为我的项目编写适当的测试套件。我可以看到在进行任何更改后能够自动测试项目中所有代码的理论值(value)。我可以看到像RSpec和Mocha这样的测试框架应该如何使设置和运行所述测试变得相当容易