本节介绍稳定性分析的原理以及代数稳定性判据(劳斯判据)
本节介绍系统稳态误差的定义及计算方法
本节介绍时域校正方法
文章目录
以下内容,均针对线性系统
稳定性的定义:
在扰动作用下系统偏离了原来的平衡状态,如果扰动消除后,系统能够以足够的准确度恢复到原来的平衡状态,则系统是稳定的。否则系统不稳定。
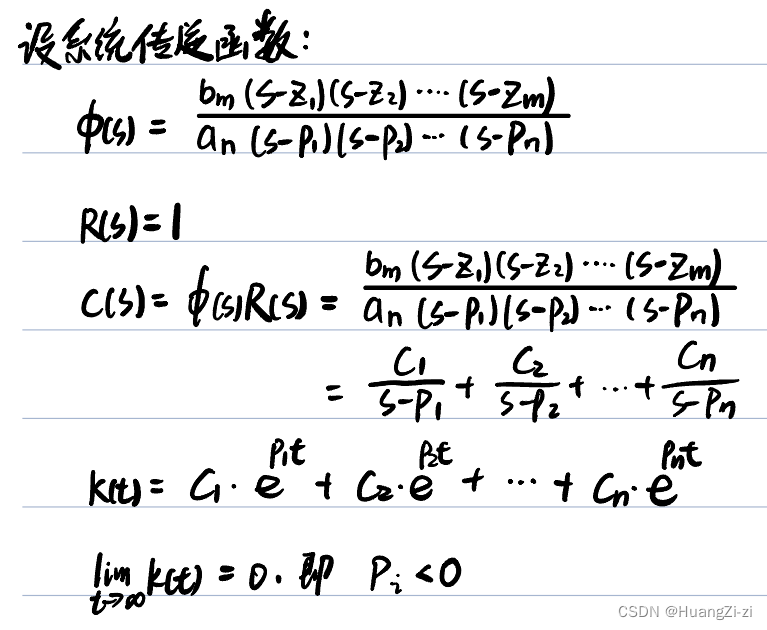
充要条件
扰动发生后要求回到原来的平衡状态,也就是单位脉冲响应为0。(认为单位脉冲为典型扰动输入)
lim
t
→
∞
k
(
t
)
=
0
\lim \limits_{t\rightarrow \infty}k(t)=0
t→∞limk(t)=0
c
i
c_i
ci是
s
=
−
p
i
s=-p_i
s=−pi处的留数。因此
lim
t
→
∞
k
(
t
)
=
0
\lim \limits_{t\rightarrow \infty}k(t)=0
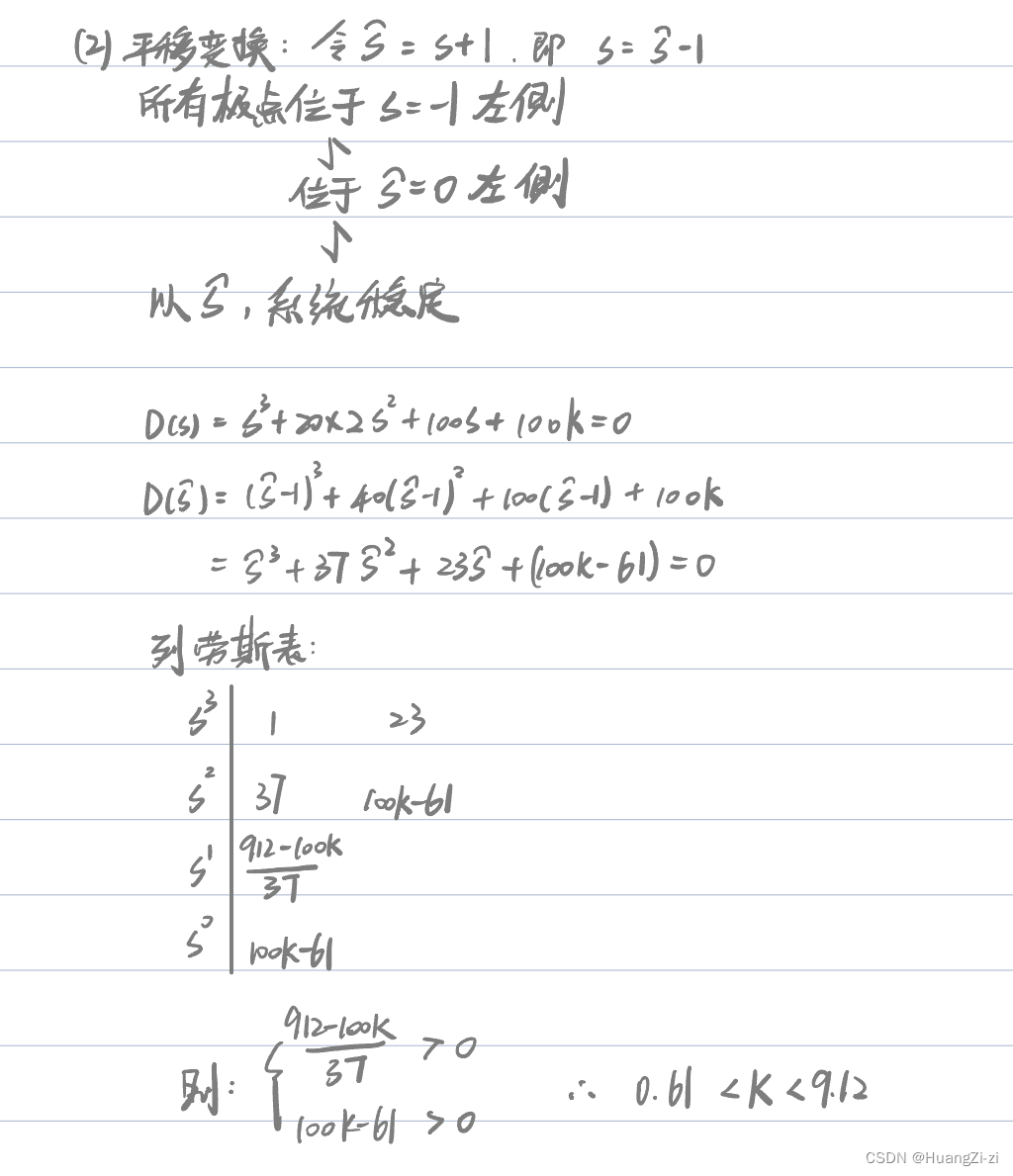
t→∞limk(t)=0的充要条件是:特征根具有负实部,也就是系统的闭环极点全部位于左半s平面
必要条件
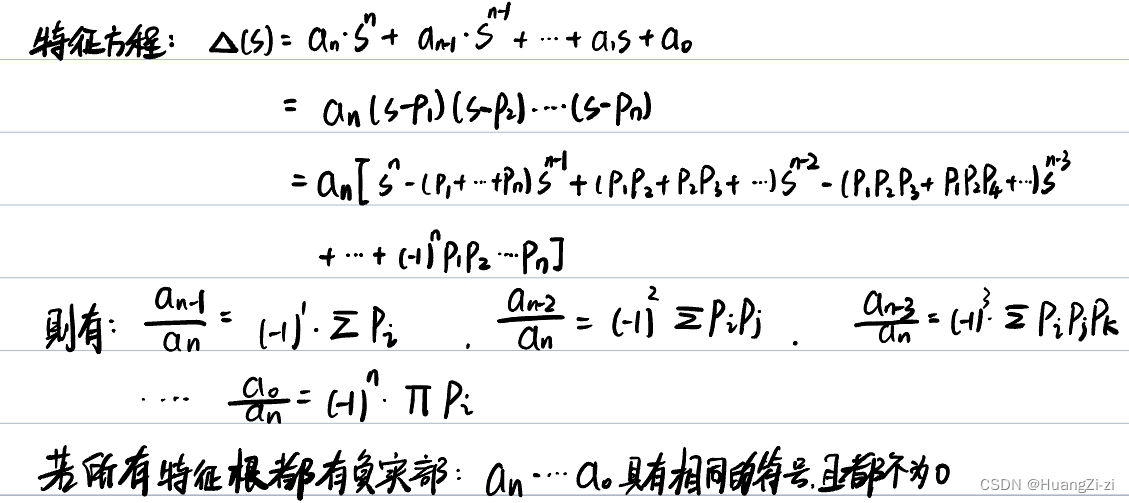
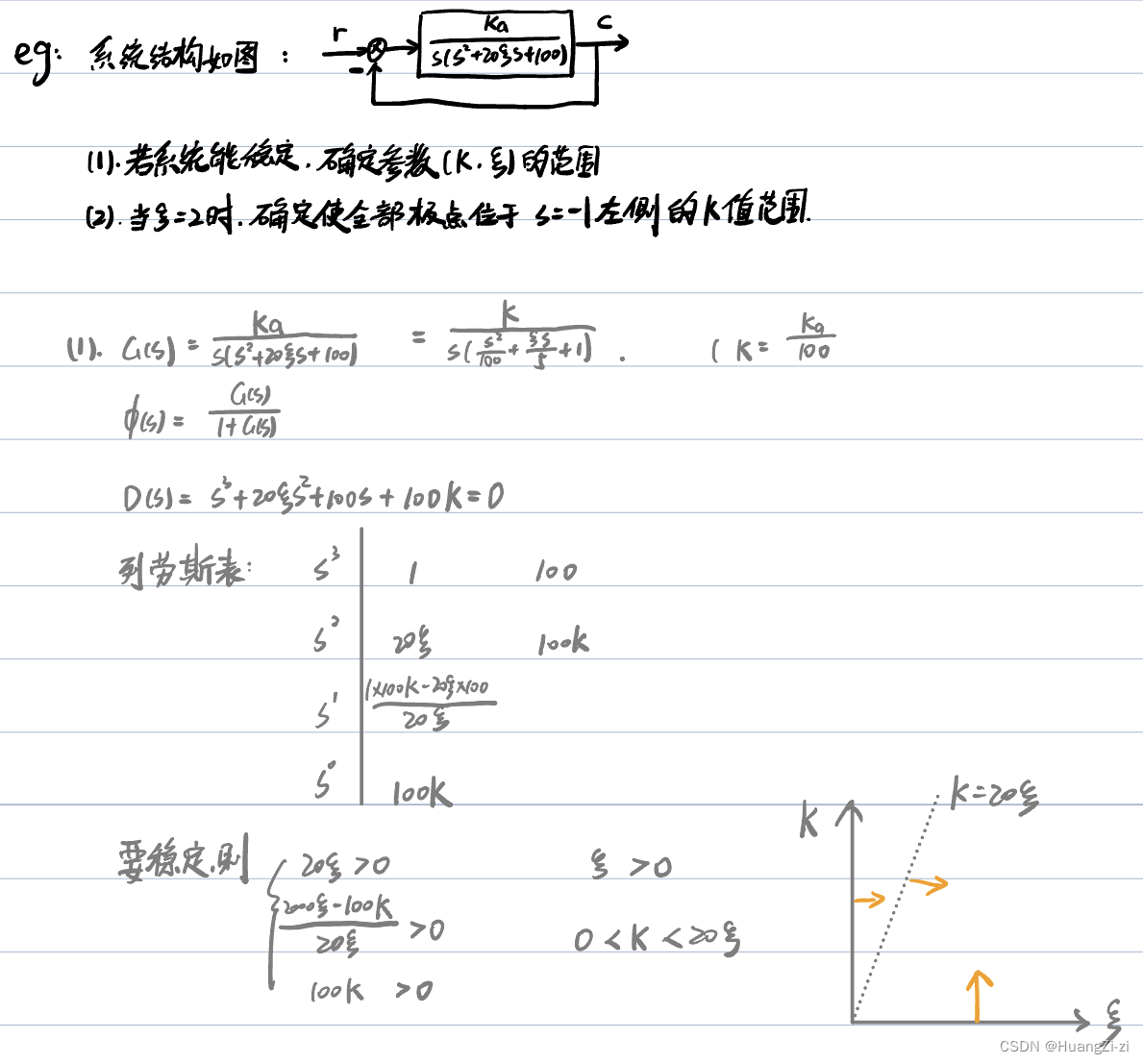
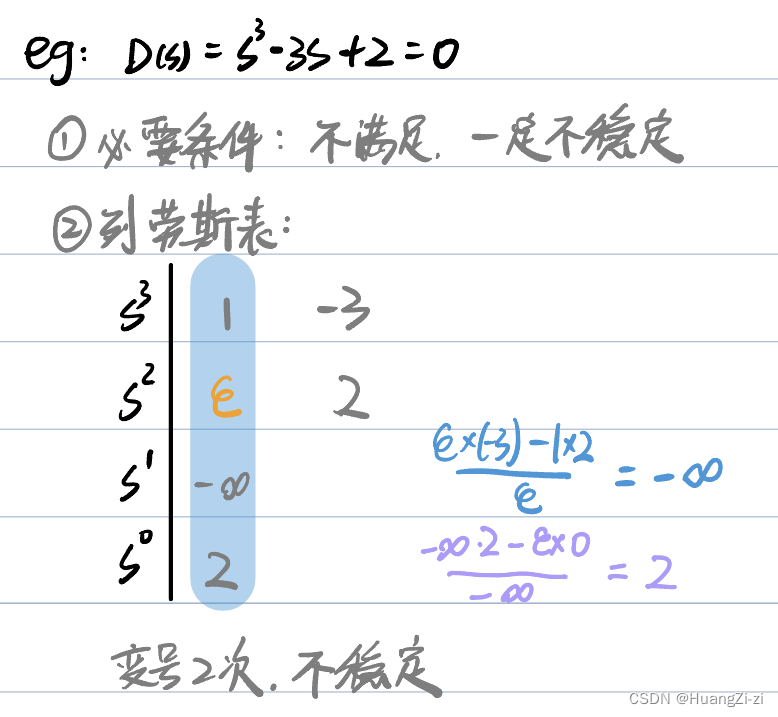
控制系统稳定的必要条件是:特征方程的各项系数具有相同的符号,且都不为0
在计算代数稳定判据之前可以先行做初步判断
列出劳斯表:
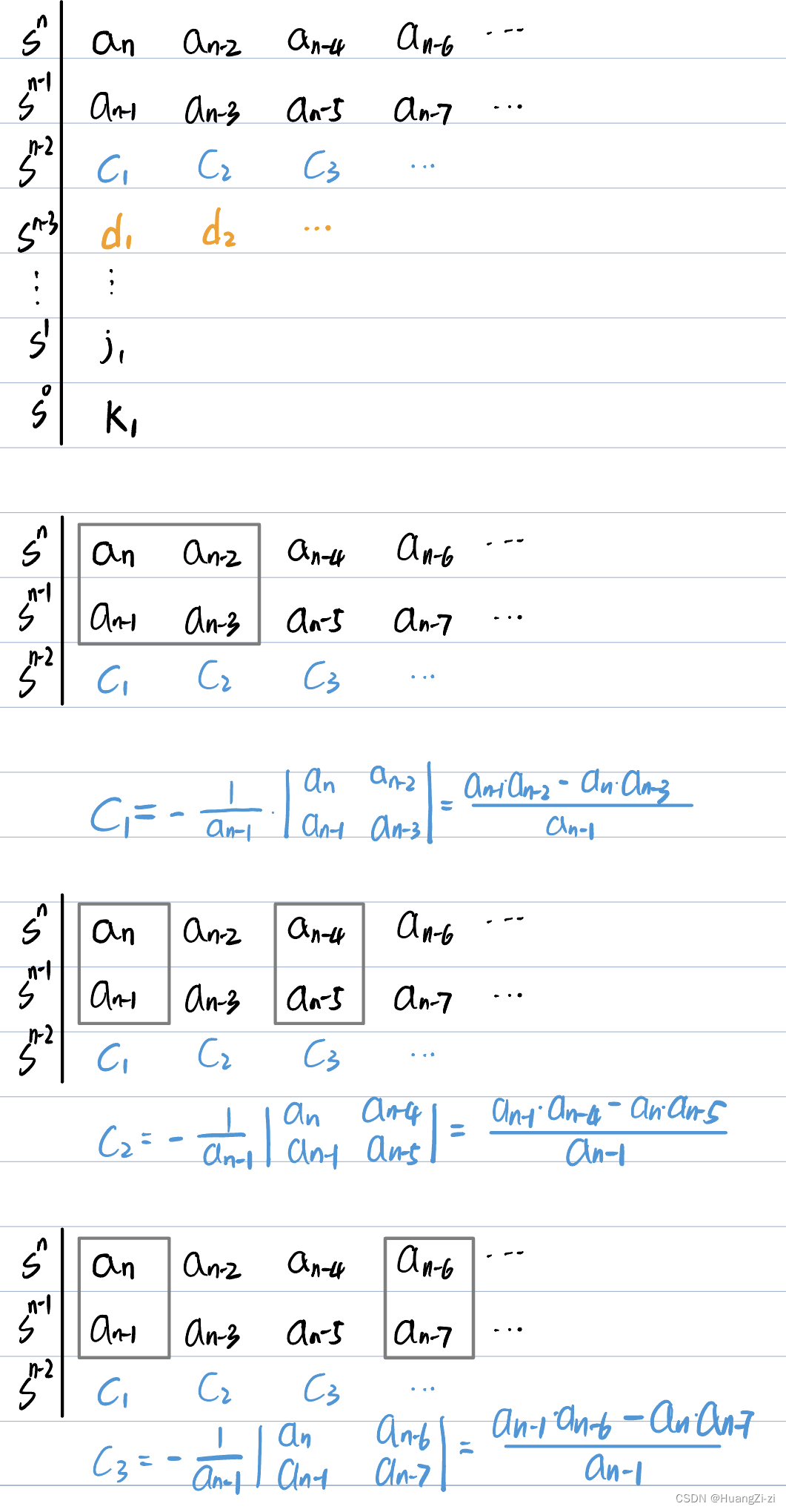
特征方程各项按照幂次从高到低排序,劳斯表第一行是奇数项(第1,3,5,7,9项)系数。第二行是偶数项(第2,4,6,8,10项)系数。
之后第x行的第y个元素等于
−
1
第
x
−
1
行的第一个元素
⋅
第
x
−
1
和
x
−
2
行的第
1
和第
i
+
1
个元素组成的行列式
-\frac{1}{第x-1行的第一个元素}\cdot 第x-1和x-2行的第1和第i+1个元素组成的行列式
−第x−1行的第一个元素1⋅第x−1和x−2行的第1和第i+1个元素组成的行列式
计算到最后s1、s0的时候,劳斯表一行只有一个元素。可以通过这个检查是否计算正确。
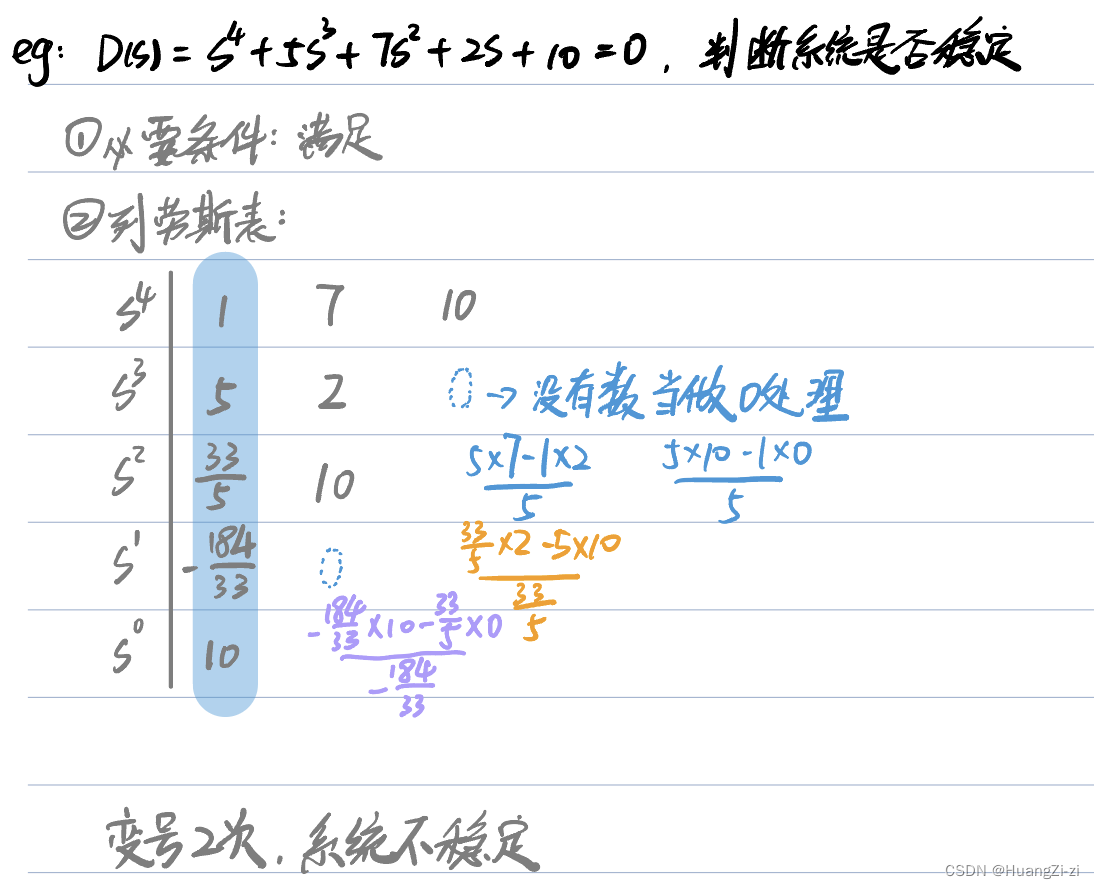
劳斯判据 :劳斯表第一列元素符号改变次数=特征方程在右半平面内的根的个数。
因此,当劳斯表第一列元素具有相同的符号,则系统稳定。
在计算时,某一行元素同时乘或除某一个数不影响最终的稳定性结论,因此遇到分数或者过大的数,可以先去分母\约分处理以简化运算。(后面例题为了直观并没有这样操作)
某行的第一列为0,但这一行不全为0
使用一个很小的正数
ε
\varepsilon
ε代替0,继续运算
某一行全部为0
用上一行元素构建辅助方程,对s求导一次,用新方程的系数代替全零行的系数继续运算
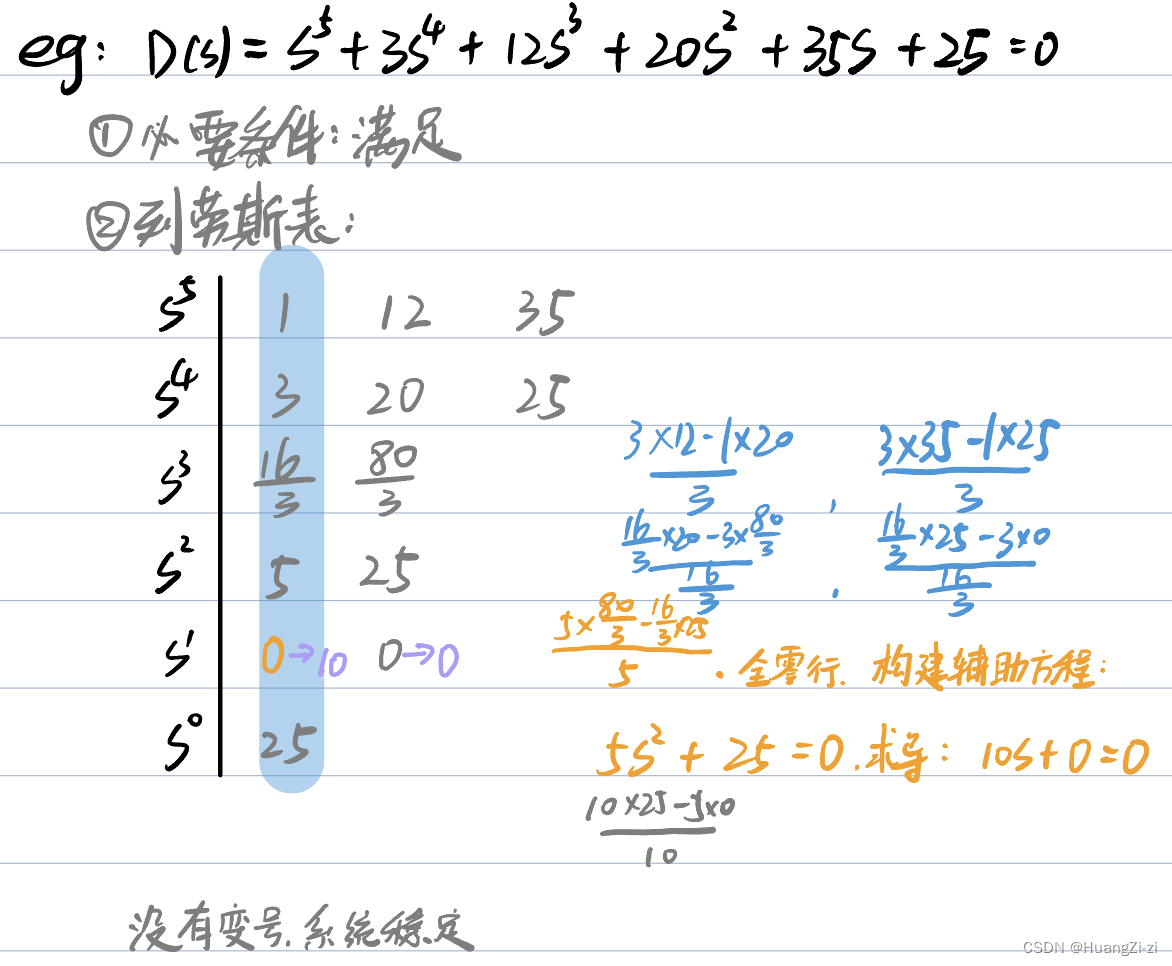
出现全零行的一定是奇次行。
出现全零行有可能是:特征方程有以原点对称的实根、以原点对称的虚根、以虚轴对称的共轭复根。具体是哪一种,需要令辅助方程=0,求解。
稳态误差是系统的稳态性能指标,是对系统控制精度的度量。
误差包括永久性误差,比如由于参数漂移、元件老化等带来的误差,还有原理性误差,即由于系统结构、参数引入的误差。这里只讨论原理性误差
通常把阶跃输入下没有原理性稳态误差的系统称为无差系统,反之称为有差系统
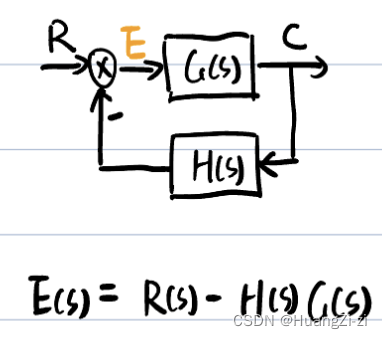
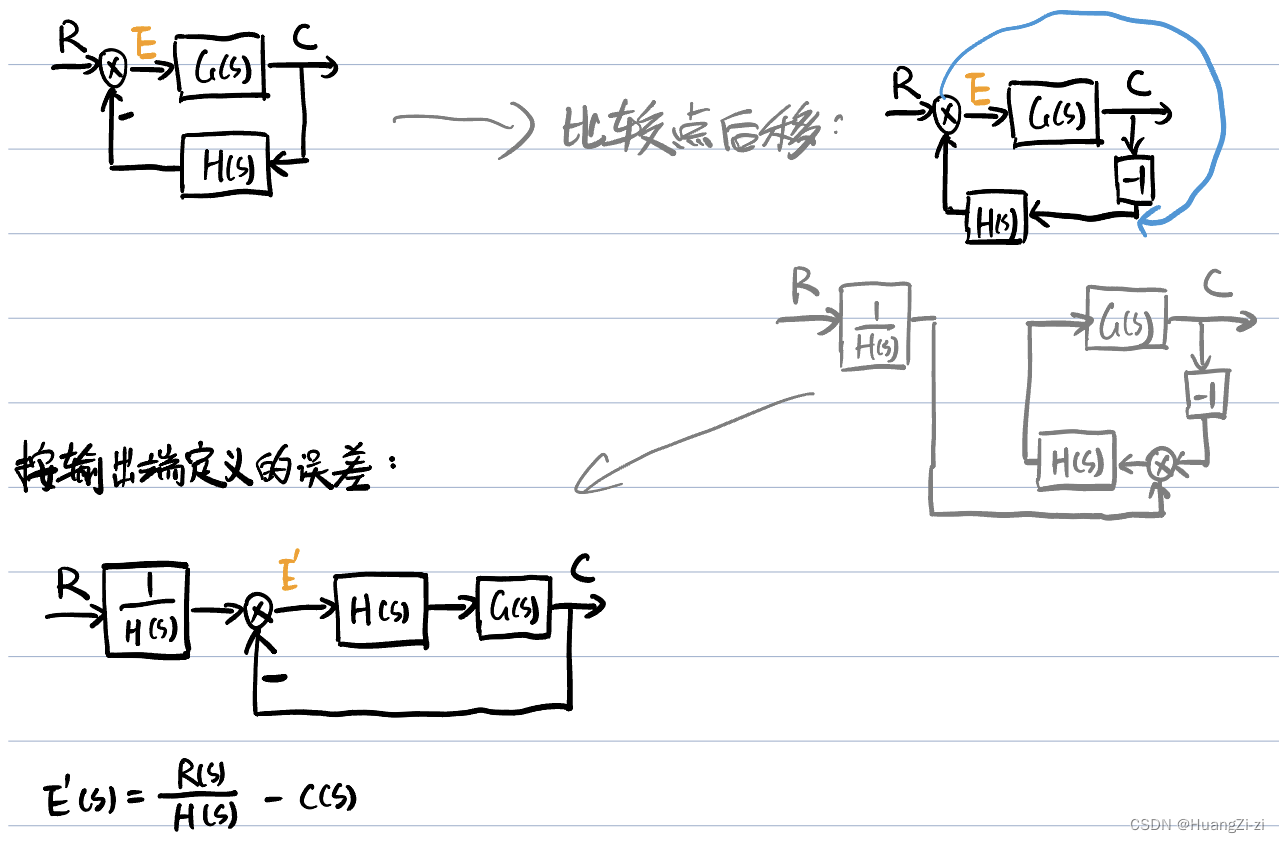
以下的分析都是基于输入端定义的误差进行的。
来看一道例题:
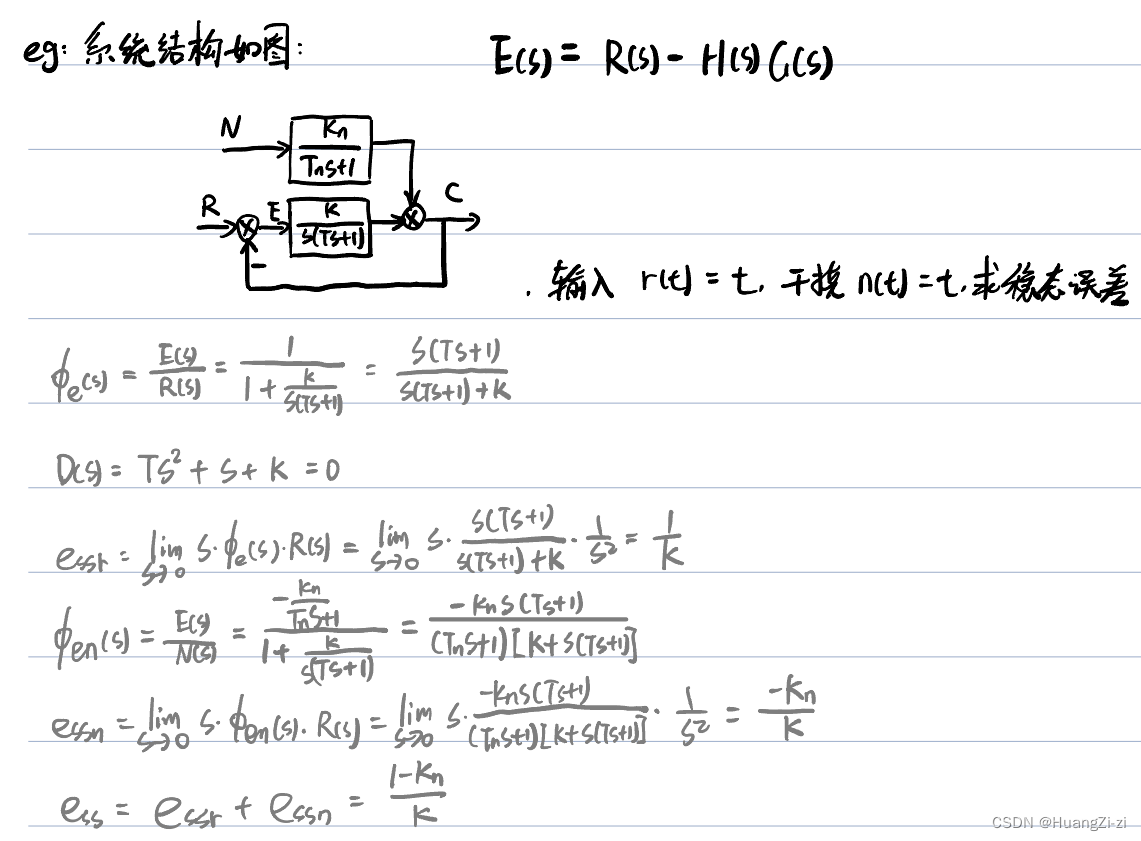
一般方法虽然实用但一般不会使用它。下面介绍静态误差系数法:
构建如下的系统:
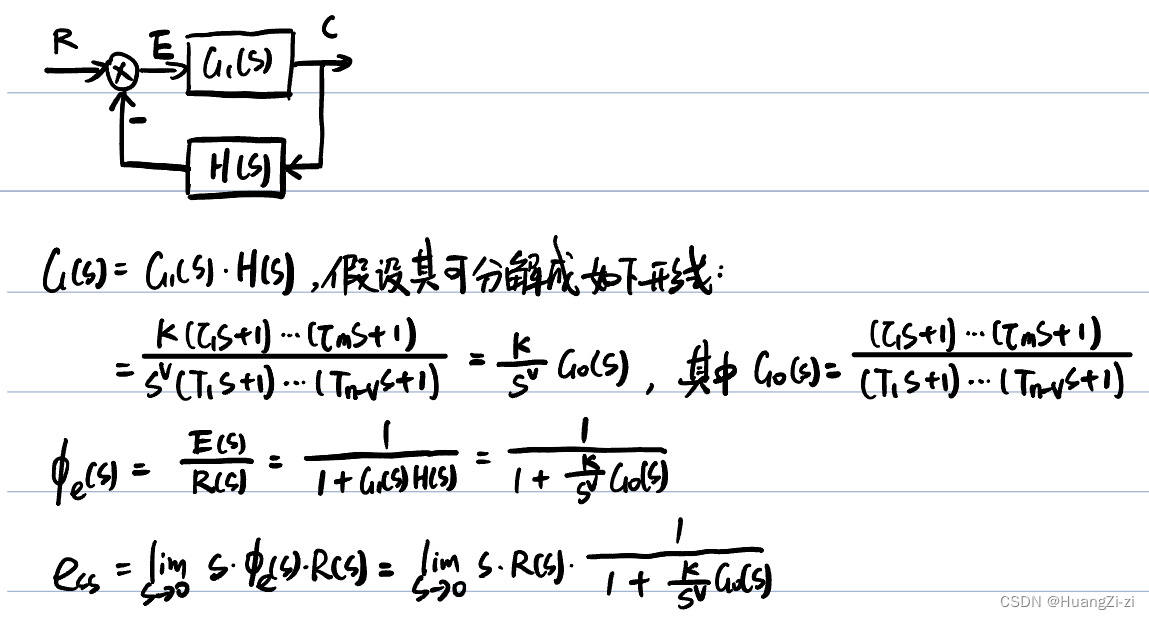
开环传递函数
G
(
s
)
=
K
s
v
G
0
(
s
)
G(s)=\frac{K}{s^v}G_0(s)
G(s)=svKG0(s)
G0化成尾1标准型所以K是开环增益
v是系统型别(就是一个分类标准,v=0叫做0型,v=1叫做1型)
仍然使用一般方法计算稳态误差。
根据不同的输入,分别代入求解,由此引出静态位置误差系数、静态速度误差系数、静态加速度误差系数的定义。
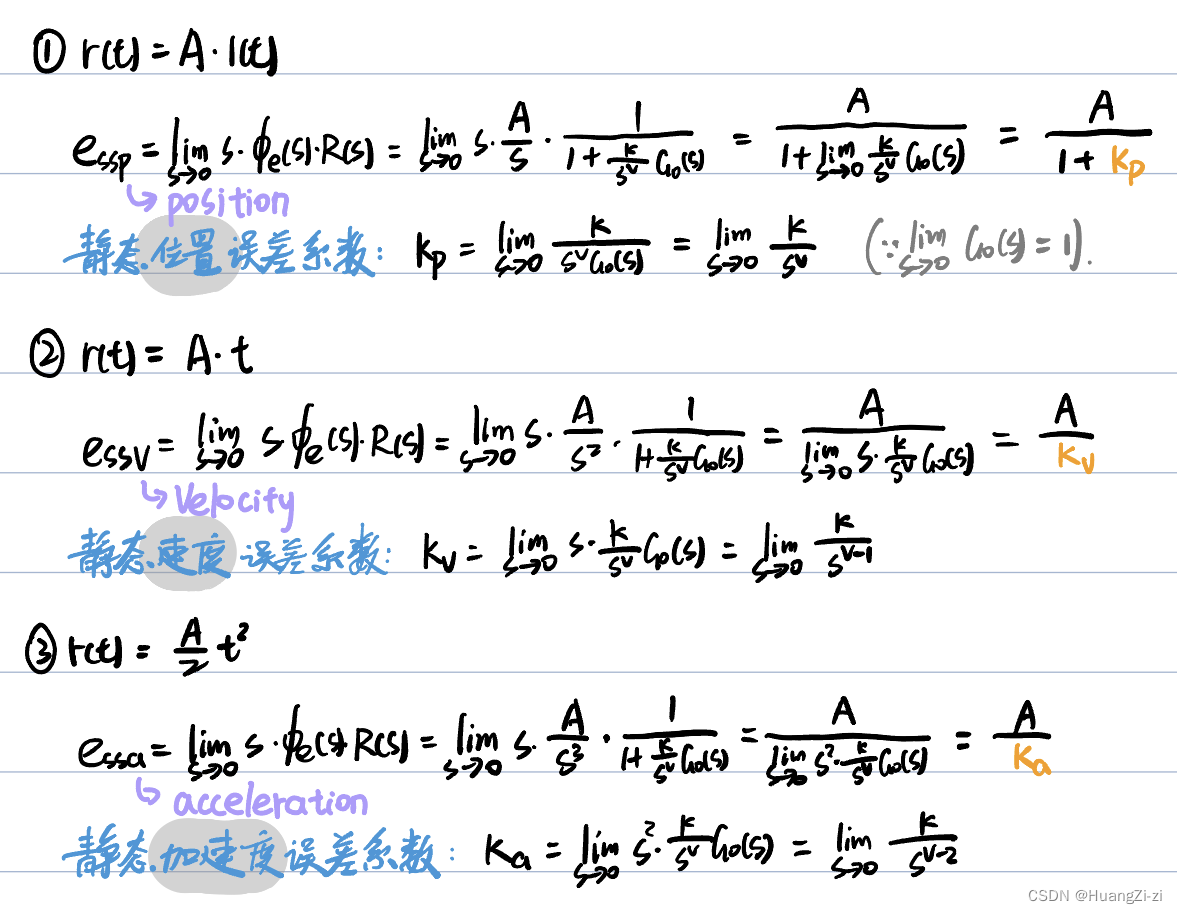
再根据不同的系统型别,分别计算出三个静态误差系数:
| 型别v | Kp | Kv | Ka |
|---|---|---|---|
| 0 | K | 0 | 0 |
| 1 | ∞ \infty ∞ | K | 0 |
| 2 | ∞ \infty ∞ | ∞ \infty ∞ | K |
再带回,计算系统的稳态误差:
| 型别v | essp | essv | essa |
|---|---|---|---|
| 0 | A 1 + K \frac{A}{1+K} 1+KA | ∞ \infty ∞ | ∞ \infty ∞ |
| 1 | 0 | A K \frac{A}{K} KA | ∞ \infty ∞ |
| 2 | 0 | 0 | A K \frac{A}{K} KA |
有了这两个表,就可以很方便的计算系统的误差了,来看一道例题:
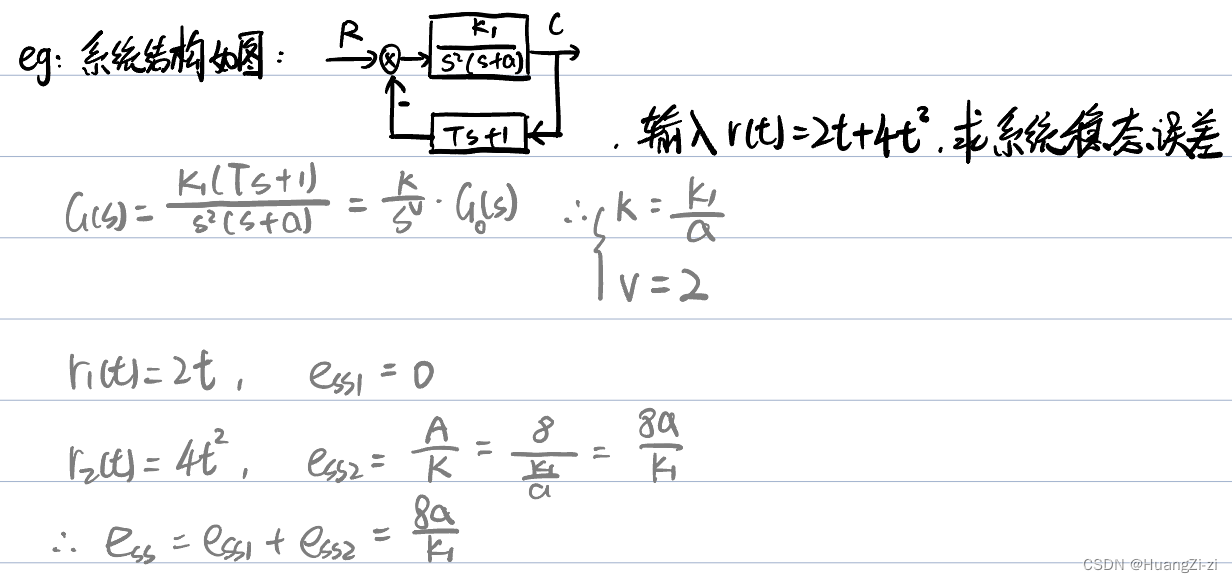
例题2:
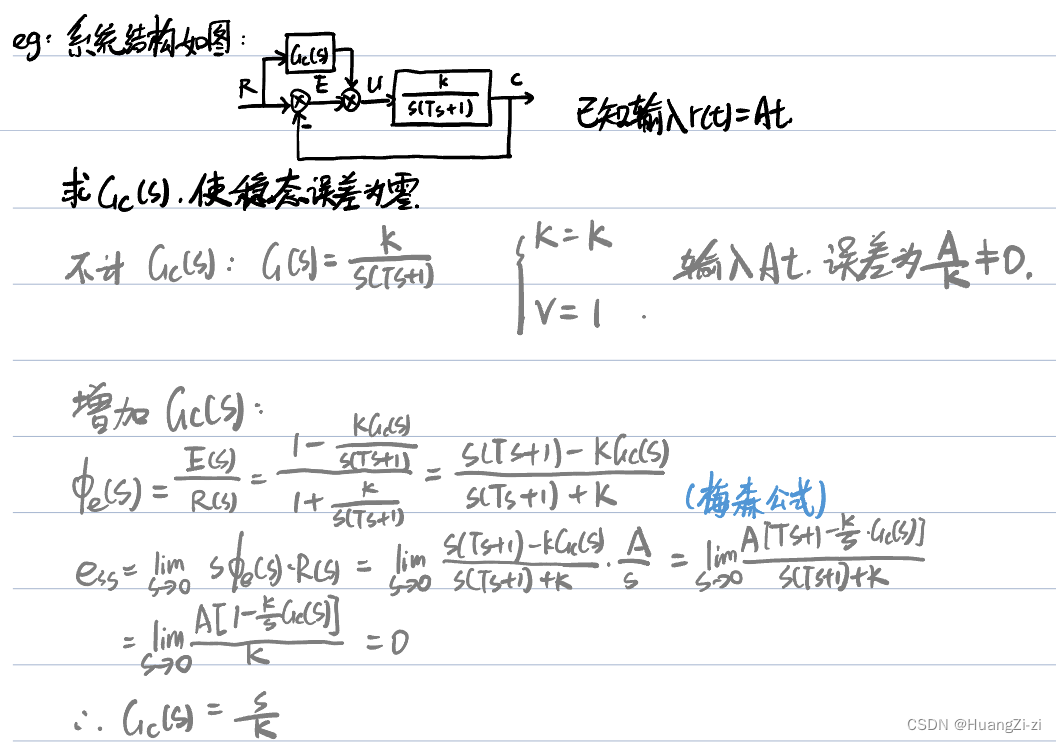
从这道例题里面可以看出:按前馈补偿的复合控制方案可以提高系统的稳态精度
例题3:
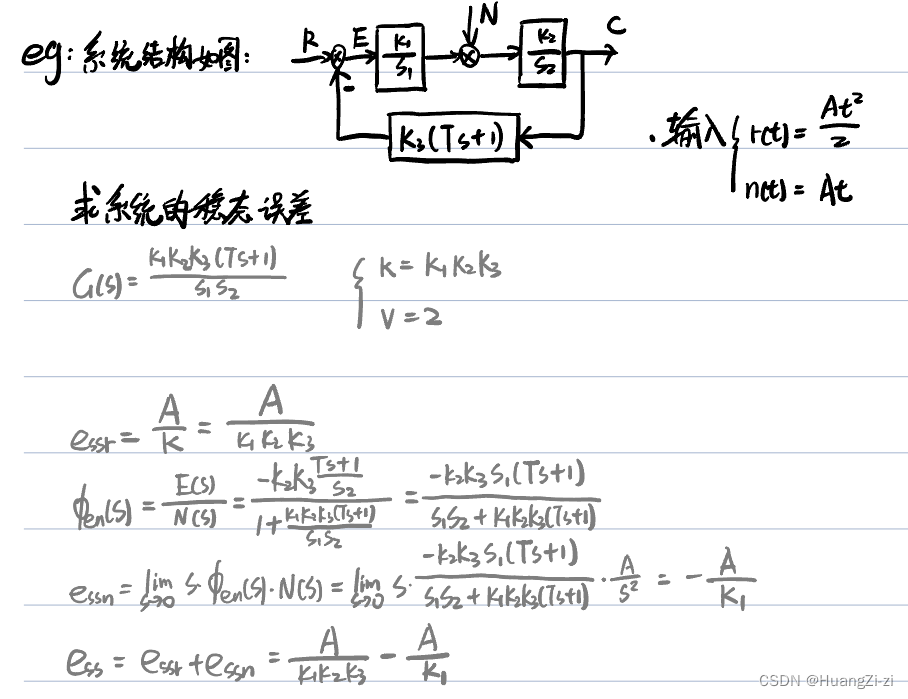
从这道例题可以看出:在主反馈口到干扰作用点之前的前向通道中提高增益、引入积分环节,可以同时减小或消除输入和干扰作用下产生的稳态误差。。
例题4:

在这道例题里面,我们一定注意,在计算稳态误差等等性能指标之前,一定确定系统是稳定的。尤其是这种需要自定义参数的题目。
静态误差系数法只能求出最终的误差稳态值ess。而使用动态误差系数法可以研究误差中的稳态分量es(t)随时间的变换规律
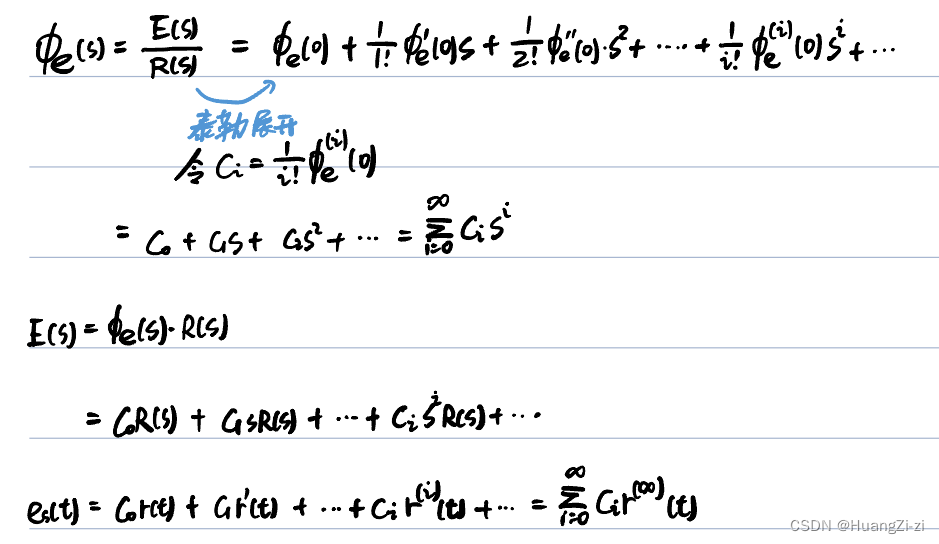
首先把误差传递函数展开,称E(s)的泰勒展开为误差级数。
C
i
=
1
i
!
Φ
e
(
i
)
(
0
)
C_i=\frac{1}{i!}\Phi_e^{(i)}(0)
Ci=i!1Φe(i)(0),称
C
i
C_i
Ci为动态误差系数
按照定义来算的话,
C
i
=
1
i
!
Φ
e
(
i
)
(
0
)
C_i=\frac{1}{i!}\Phi_e^{(i)}(0)
Ci=i!1Φe(i)(0)但是这样的计算方法比较繁琐所以一般使用长除法:
(将开环传递函数按升幂排列才能除出级数的形式)
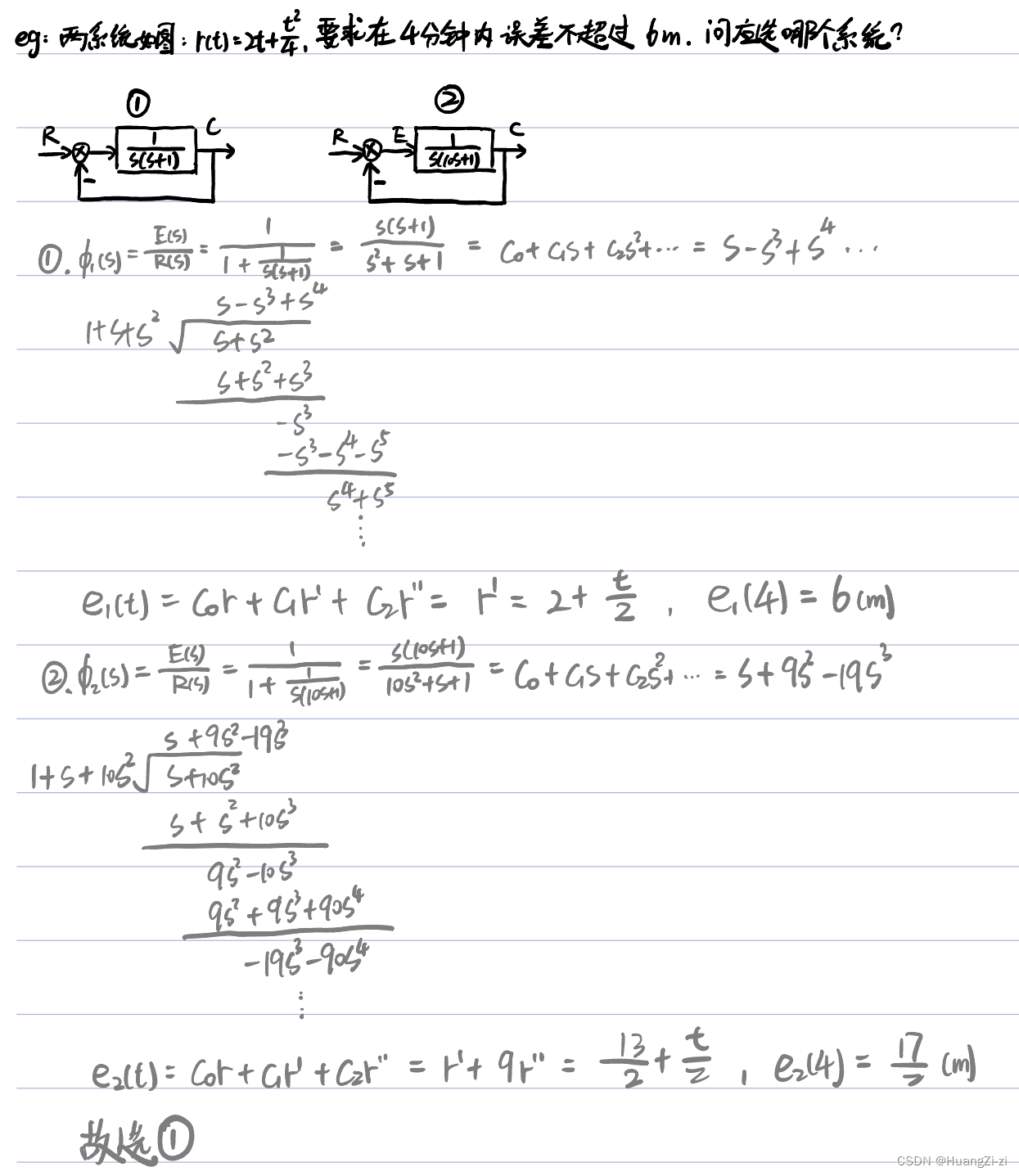
这个问题需要注意的是,即使稳态误差是无穷大,控制系统仍然是可用的。比如导弹的控制系统,导弹打出去几分钟就爆炸了,那么只要在这几分钟之内误差满足要求就好了。
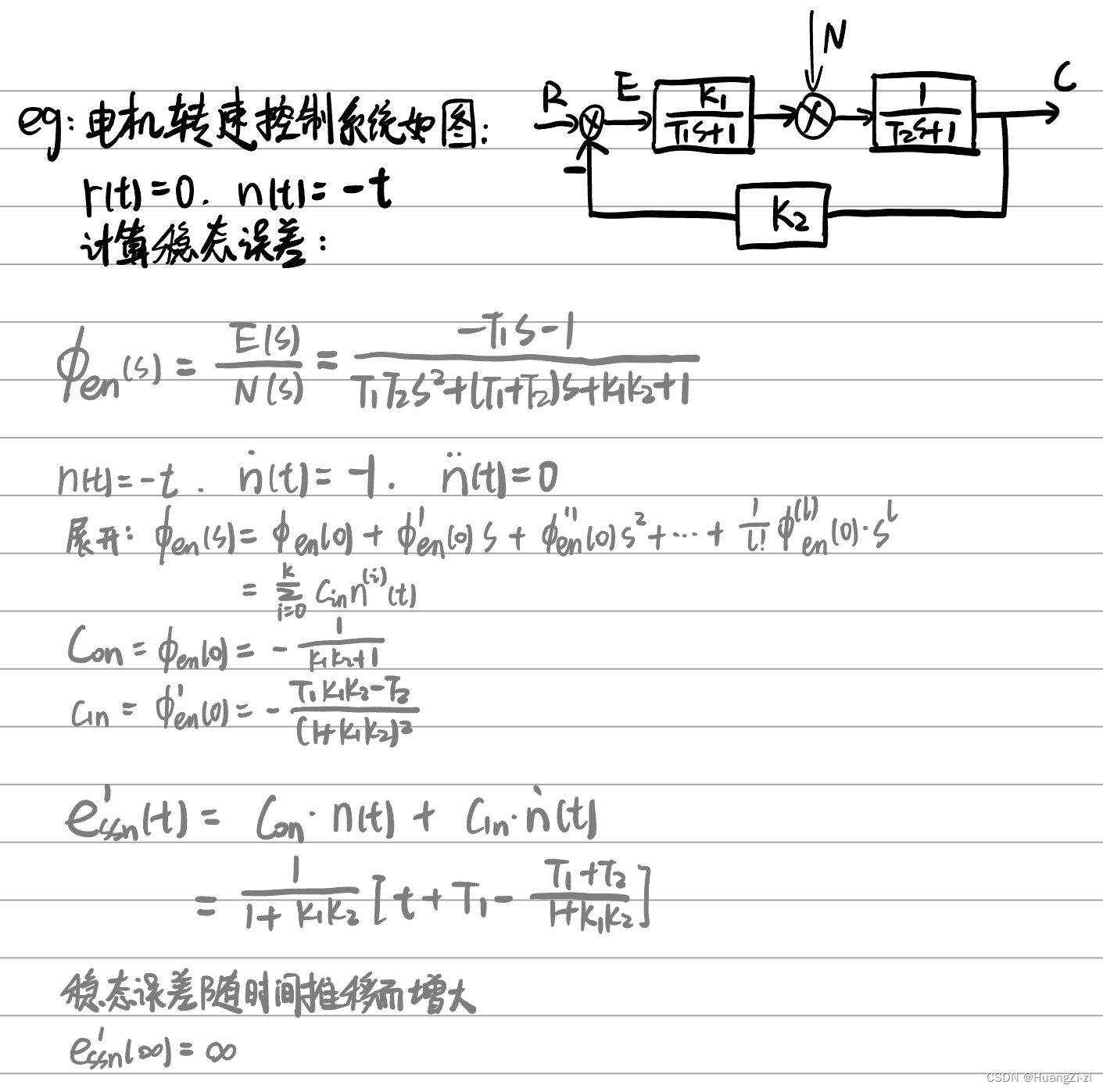
之前的讨论是从输入端直接有输入时造成的干扰。而接下来单独讨论某一个特定的扰动作用下产生的稳态误差。
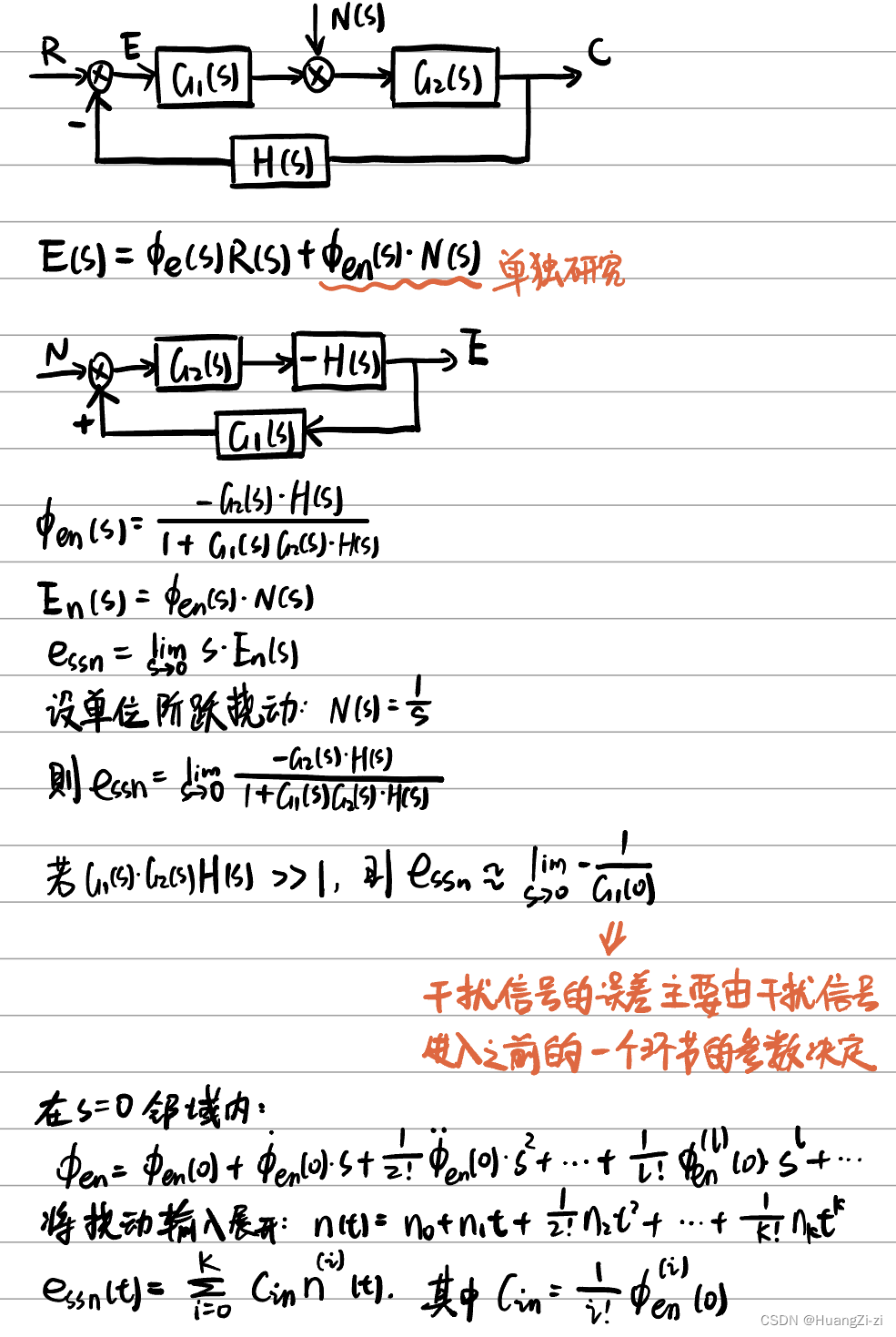
其实分析方法都是一样的,使用的是动态误差系数法。不同在于传递函数变成了误差传递函数
校正:采用适当的方式,在系统中加入一些校正装置,用以改善系统性能,使系统满足指标要求。
校正装置:结构和参数可调整的装置
校正方式:串连校正、反馈校正、复合校正
时域校正不怎么常用,了解即可
反馈的作用:
局部正反馈可以提高环节增益
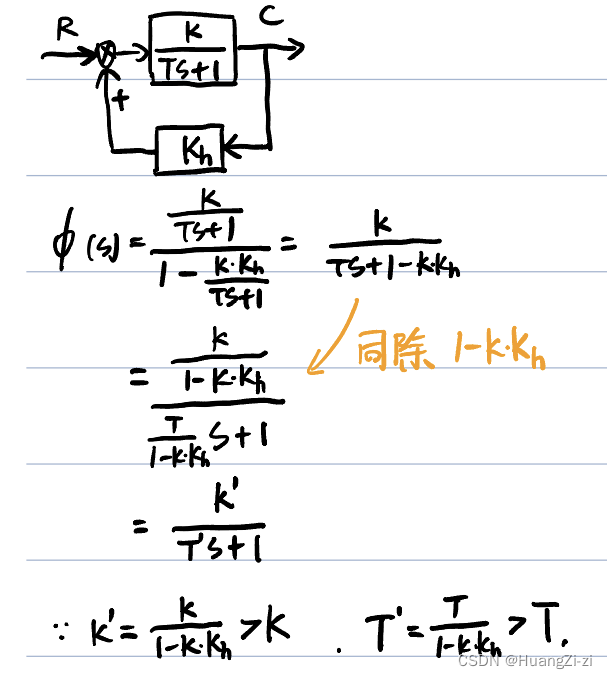
增加局部正反馈之后系统增益变大,调节时间变长。

增加局部反馈之前,系统不稳定。而增加这个反馈之后系统变得稳定,也就是被校正了。
复合校正就是串联校正加上反馈校正。串连校正前面没有讲过,其实就是加一个环节。
看下面这个例题:
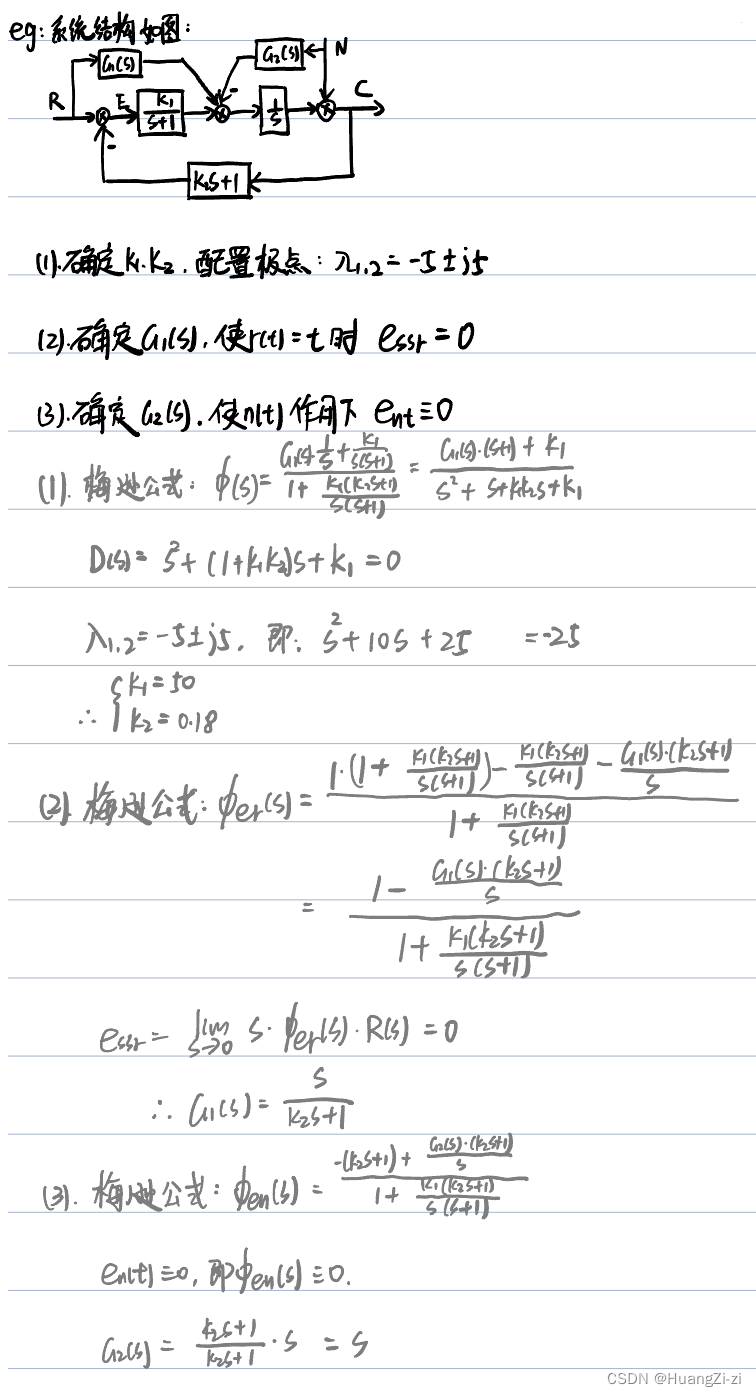
在这道题里面,G1G2属于前馈校正元件,K1是串连校正元件的增益,
1
s
\frac{1}{s}
s1是反馈校正元件。
我使用的是Firefox版本36.0.1和Selenium-Webdrivergem版本2.45.0。我能够创建Firefox实例,但无法使用脚本继续进行进一步的操作无法在60秒内获得稳定的Firefox连接(127.0.0.1:7055)错误。有人能帮帮我吗? 最佳答案 我遇到了同样的问题。降级到firefoxv33后一切正常。您可以找到旧版本here 关于ruby-无法在60秒内获得稳定的Firefox连接(127.0.0.1:7055),我们在StackOverflow上找到一个类
我想通过控制台手动创建一个用户:User.find_or_create_by(email:"user@mail.com",first_name:"Stan",last_name:"Smith",password:"password",password_confirmation:"password",confirmed_at:Time.now)我在过去的项目中多次这样做,但这次没有用。它没有获取Devise密码模型属性,所以这是我得到的错误:PG::UndefinedColumn:ERROR:columnusers.passworddoesnotexist我有Rails4.1.4和Dev
如何稳定地对数组进行排序?我要排序的值可能有很多重复项,我不确定ruby使用哪种排序算法。我认为插入排序最适合我。示例:a=[[:a,0],[:b,1],[:c,0],[:d,0]]a.sort_by{|x,y|y}#=>[[:a,0],[:d,0],[:c,0],[:b,1]]寻找[[:a,0],[:c,0],[:d,0],[:b,1]] 最佳答案 把你原本想排序的键和索引放到一个数组中,然后排序。a.sort_by.with_index{|(x,y),i|[y,i]}#=>[[:a,0],[:c,0],[:d,0],[:b,
文章目录认识unity打包目录结构游戏逆向流程Unity游戏攻击面可被攻击原因mono的打包建议方案锁血飞天无限金币攻击力翻倍以上统称内存挂透视自瞄压枪瞬移内购破解Unity游戏防御开发时注意数据安全接入第三方反作弊系统外挂检测思路狠人自爆实战查看目录结构用il2cppdumper例子2-森林whoishe后记认识unity打包目录结构dll一般很大,因为里面是所有的游戏功能编译成的二进制码游戏逆向流程开发人员代码被编译打包到GameAssembly.dll中使用il2ppDumper工具,并借助游戏名_Data\il2cpp_data\Metadata\global-metadata.dat
前言 Slowloris攻击是我在李华峰老师的书——《MetasploitWeb 渗透测试实战》里面看的,感觉既简单又使用,现在这种攻击是很容易被防护的啦。不过我也不敢真刀实战的去试,只是拿个靶机玩玩罢了。 废话还是写在结语里面吧。(划掉)结语可以不看(划掉)Slowloris攻击的原理 Slowloris是一种资源消耗类DoS攻击,它利用部分HTTP请求进行操作。也叫做慢速攻击,这里的慢速并不是说发动攻击慢,而是访问一条链接的速度慢。Slowloris攻击的功能是打开与目标Web服务器的连接,然后尽可能长时间的保持这些连接打开。如果由多台电脑同时发起Slo
目录一、原理部分1、什么是串行通信(1)并行通信与串行通信(2)串行通信的制式(3)串行通信的主要方式 2、配置串口(1)SCON和PCON:串行口1的控制寄存器(2)SBUF:串行口数据缓冲寄存器 (3)AUXR:辅助寄存器编辑(4)ES、PS:与串行口1中断相关的寄存器(5)波特率设置 3、串口框架编写二、程序案例一、原理部分1、什么是串行通信(1)并行通信与串行通信微控制器与外部设备的数据通信,根据连线结构和传送方式的不同,可以分为两种:并行通信和串行通信。并行通信:数据的各位同时发送与接收,每个数据位使用一条导线,这种方式传输快,但是需要多条导线进行信号传输。串行通信:数据一位一
例如,我一直看到称为String#split的方法,但从未见过String.split,这似乎更合乎逻辑。或者甚至可能是String::split,因为您可以认为#split位于String的命名空间中。当假定/隐含类(#split)时,我什至单独看到了该方法。我知道这是ri中识别方法的方式。哪个先出现?例如,这是为了区分方法和字段吗?我还听说这有助于区分实例方法和类方法。但这从哪里开始呢? 最佳答案 不同之处在于您如何访问这些方法。类方法使用::分隔符来表示消息可以发送到类/模块对象,而实例方法使用#分隔符表示消息可以发送到实例对
1、为什么压缩的原始数据一般采用YUV格式(1)利用人对图片感觉的生理特性,对于亮度信息比较敏感,对于色度信息不太敏感,所以视频编码是将Y分量和UV分量分开来编码,并且可以减少UV分量.2、视频压缩原理(1)空间冗余:图像相邻像素之间的相关性,比如一帧图片被划分成多个16x16的块之后,相邻的块之间有很多明显的相似性。(2)时间冗余:时间相差较近的两张图片变化较小。(3)视觉冗余:我们的眼睛对某些细节不太敏感,对图像中的高频信息的敏感度小于低频信息,可以去除一些高频信息。(4)编码冗余:一幅图片中不同像素出现的概率是不同的,对于出现次数较多的像素,用少的位数来编码,对于出现次数较少的像素,用多
Python程序运行原理Python是一种脚本语言,编辑完成的程序,也称源代码,可以直接运行。从计算机的角度看,Python程序的运行过程包含两个步骤:解释器将源代码翻译成字节码(即中间码),然后由虚拟机解释执行。Python程序文件的扩展名通常为.py。在执行时,首先由Python解释器将.py文件中的源代码翻译成中间码,这个中间码是一个扩展名为.pyc的文件,再由Python虚拟机(PythonVirtualMachine,PVM)逐条将中间码翻译成机器指令执行。需要说明的是,pyc文件保存在Python安装目录的pycache文件夹下,如果Python无法在用户的计算机上写人字节码,字节
我将其组合在一起,作为一种看似可靠的方式来调用不稳定的Web服务,该服务会出现超时和偶尔的名称解析或套接字错误或其他任何问题。我想我会把它放在这里以防它有用,或者更有可能被告知执行此操作的更好方法。require'net/http'retries=5beginurl=URI.parse('http://api.flakywebservice.com')http=Net::HTTP.new(url.host,url.port)http.read_timeout=600#beverypatientres=nilhttp.start{|http|req=Net::HTTP::Post.new