无人车是一种可以进行路径规划和环境感知的智能自主车,已成为当前智能车辆的热门发展方向。无人车能够通过车载传感器识别周围情况和自身状态信息,自身具有导航、定位的功能,能够完成路径规划、寻找特定目标等过程,对于智能化无人车的研究,其核心内容是导航控制技术。
在不同天气、不同时间条件下,仅靠单一导航无法满足高精度定位与导航的需求,不同环境下无人车上会安装多种传感器,传感器的特性各不相同,目前常用的传感器有惯性测量元件(IMU)、超宽带(UWB)、轮式里程计等。
为了让无人车系统具有更高的自适应性和可靠性,哈尔滨工业大学的研究人员研究了基于多源传感器信息融合的导航系统,针对传感器信息异步融合问题和存在传感器失效的情况,使用因子图模型建立融合框架,将各个传感器信息抽象成因子,采用一种基于贝叶斯树形结构的增量平滑优化算法(ISAM2)对传感器信息进行处理和融合,该方法能够保证精度接近最小二乘方法的同时,也具有高效的计算效率,能够较大提高整个系统鲁棒性和可靠性。
研究主要针对室内环境,无人车已相对低速运行,融合惯性测量元件、超宽带、里程计三种传感器数据。为了验证算法的性能,研究人员搭建了多传感器信息融合平台。平台采用scout2.0移动机器四轮车,车载传感器包括MTi-G-700(IMU)、LinkTrack S(UWB) 和里程计(ODOM) ,实验平台基于Ubuntu系统,并利用ROS进行数据同步采集。

UWB基站布置位置

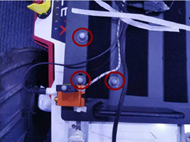
IMU、UWB安装位置
为了获取小车的位置真实值,实验中使用NOKOV度量动作捕捉系统,通过布置在场地上方的16个Mars系列动作捕捉镜头(场地约为5m×5m),对粘贴在小车上的三个反光标识点进行识别,从而确定无人车的真实位置。由于动作捕捉系统定位精度达到亚毫米级,是作为小车运动轨迹真值的最佳选择。

NOKOV度量动作捕捉系统
刚体安装位置
为了分析定位效果,实验主要将IMU+UWB+ODOM 融合数据和动捕系统采集的真实值做对比,同时分析对于单体传感器的定位效果与真实值的对比。
可以看出单传感器存在一定局限性,融合算法能够提升单传感器的定位效果,说明了本文算法的可行性。同时研究人员还分析了方法的效率和鲁棒性,证明了该方法极大的提高了计算效率,并具有一定鲁棒性,在部分传感器失效时也能获取较为准确的定位信息。
参考文献:沈贺兵. 无人车多源传感器信息融合导航技术研究[D].哈尔滨工业大学,2021.DOI:10.27061/d.cnki.ghgdu.2021.004020.
大约一年前,我决定确保每个包含非唯一文本的Flash通知都将从模块中的方法中获取文本。我这样做的最初原因是为了避免一遍又一遍地输入相同的字符串。如果我想更改措辞,我可以在一个地方轻松完成,而且一遍又一遍地重复同一件事而出现拼写错误的可能性也会降低。我最终得到的是这样的:moduleMessagesdefformat_error_messages(errors)errors.map{|attribute,message|"Error:#{attribute.to_s.titleize}#{message}."}enddeferror_message_could_not_find(obje
我主要使用Ruby来执行此操作,但到目前为止我的攻击计划如下:使用gemsrdf、rdf-rdfa和rdf-microdata或mida来解析给定任何URI的数据。我认为最好映射到像schema.org这样的统一模式,例如使用这个yaml文件,它试图描述数据词汇表和opengraph到schema.org之间的转换:#SchemaXtoschema.orgconversion#data-vocabularyDV:name:namestreet-address:streetAddressregion:addressRegionlocality:addressLocalityphoto:i
在应用开发中,有时候我们需要获取系统的设备信息,用于数据上报和行为分析。那在鸿蒙系统中,我们应该怎么去获取设备的系统信息呢,比如说获取手机的系统版本号、手机的制造商、手机型号等数据。1、获取方式这里分为两种情况,一种是设备信息的获取,一种是系统信息的获取。1.1、获取设备信息获取设备信息,鸿蒙的SDK包为我们提供了DeviceInfo类,通过该类的一些静态方法,可以获取设备信息,DeviceInfo类的包路径为:ohos.system.DeviceInfo.具体的方法如下:ModifierandTypeMethodDescriptionstatic StringgetAbiList()Obt
文章目录1.开发板选择*用到的资源2.串口通信(个人理解)3.代码分析(注释比较详细)1.主函数2.串口1配置3.串口2配置以及中断函数4.注意问题5.源码链接1.开发板选择我用的是STM32F103RCT6的板子,不过代码大概在F103系列的板子上都可以运行,我试过在野火103的霸道板上也可以,主要看一下串口对应的引脚一不一样就行了,不一样的就更改一下。*用到的资源keil5软件这里用到了两个串口资源,采集数据一个,串口通信一个,板子对应引脚如下:串口1,TX:PA9,RX:PA10串口2,TX:PA2,RX:PA32.串口通信(个人理解)我就从串口采集传感器数据这个过程说一下我自己的理解,
我遇到了这个奇怪的错误.../Users/gideon/Documents/ca_ruby/rubytactoe/lib/player.rb:13:in`gets':Isadirectory-spec(Errno::EISDIR)player_spec.rb:require_relative'../spec_helper'#theuniverseisvastandinfinite...itcontainsagame....butnoplayersdescribe"tictactoegame"docontext"theplayerclass"doit"musthaveahumanplay
我有两个文本文件,master.txt和926.txt。如果926.txt中有一行不在master.txt中,我想写入一个新文件notinbook.txt。我写了我能想到的最好的东西,但考虑到我是一个糟糕的/新手程序员,它失败了。这是我的东西g=File.new("notinbook.txt","w")File.open("926.txt","r")do|f|while(line=f.gets)x=line.chompifFile.open("master.txt","w")do|h|endwhile(line=h.gets)ifline.chomp!=xputslineendende
我使用raise(ConfigurationError.new(msg))引发错误我试着用rspec测试一下:expect{Base.configuration.username}.toraise_error(ConfigurationError,message)但这行不通。我该如何测试呢?目标是匹配message。 最佳答案 您可以使用正则表达式匹配错误消息:it{expect{Foo.bar}.toraise_error(NoMethodError,/private/)}这将检查NoMethodError是否由privateme
我最近一直在查看一些gem的源代码。我经常看到的一个习惯用法是使用嵌套模块,其中包含连接到版本字符串中的版本常量,即围绕此类事物的变体:moduleChunkyBaconmoduleVersionMAJOR=0MINOR=6TINY=2endVERSION=[Version::MAJOR,Version::MINOR,Version::TINY].compact*'.'end以这种方式存储库版本信息有什么好处(如果有的话)?为什么不这样做:moduleChunkyBaconVERSION='0.6.2'.freezeend 最佳答案
如何使用如下两个数组构建一个数组:名称=[a,b,c]how_many_of_each[3,5,2]得到my_array=[a,a,a,b,b,b,b,b,c,c] 最佳答案 使用zip、flat_map和数组乘法:irb(main):001:0>value=[:a,:b,:c]=>[:a,:b,:c]irb(main):002:0>times=[3,5,2]=>[3,5,2]irb(main):003:0>value.zip(times).flat_map{|v,t|[v]*t}=>[:a,:a,:a,:b,:b,:b,:b,:b
如何在Ruby中获取linux系统(这必须适用于Fedora、Ubuntu等)的软件/硬件信息? 最佳答案 Chef背后的优秀人才,拥有一颗名为Ohai的优秀gemhttps://github.com/opscode/ohai以散列形式返回系统信息,例如操作系统、内核、规范、fqdn、磁盘、空间、内存、用户、接口(interface)、sshkey等。它非常完整,非常好。它还会安装命令行二进制文件(也称为ohai)。 关于ruby-如何在Ruby中获取linux系统信息,我们在Stack