华为机试 HJ35 蛇形矩阵
描述
蛇形矩阵是由1开始的自然数依次排列成的一个矩阵上三角形。
例如,当输入5时,应该输出的三角形为:
1 3 6 10 15
2 5 9 14
4 8 13
7 12
11
输入描述:
输入正整数N(N不大于100)
输出描述:
输出一个N行的蛇形矩阵。
示例1
输入:
4
输出:
1 3 6 10
2 5 9
4 8
7
具体做法:
我们可以准备一个n∗n的二维矩阵,只填充矩阵上半个三角形,而填充顺序从每行的第一列开始,每次都往右上角方向填充元素,即矩阵行坐标递减,列坐标递增,而填充的数字依次增加就行了。

然后我们顺序遍历这个矩阵,将非零的元素依次输出即可。
#include<iostream>
#include<vector>
using namespace std;
int main(){
int n;
while(cin >> n){
vector<vector<int> > matrix(n, vector<int>(n, 0)); //定义一个n*n的矩阵
int num = 1;
for(int i = 0; i < n; i++){
int j = i, k = 0;
while(j >= 0){
matrix[j][k] = num; //录入数字
num++;
j--; //往右上方移
k++;
}
}
for(int i = 0; i < n; i++){ //遍历数组每一行
int j = 0;
while( j < n && matrix[i][j] != 0){ //每行只输出前面非零部分
cout << matrix[i][j] << " ";
j++;
}
cout << endl; //换行
}
}
return 0;
}
复杂度分析:
具体做法:
仔细观察这样的蛇形矩阵,我们可以尝试找规律:
对于每一行第一个元素,我们发现2与1之间相差为1,4与2之间相差为2,7与4之间相差为3,11与7之间相差为4,则第iii行的第一个元素与它的下一行是相差了个行号(从1开始)。
对于每一行的每个元素,我们发现3与1之间相差为2,6与3之间相差为3,10与6之间相差为4,15与10之间相差为5,则第jjj列与它的前一列相差为其列号(从1开始)。
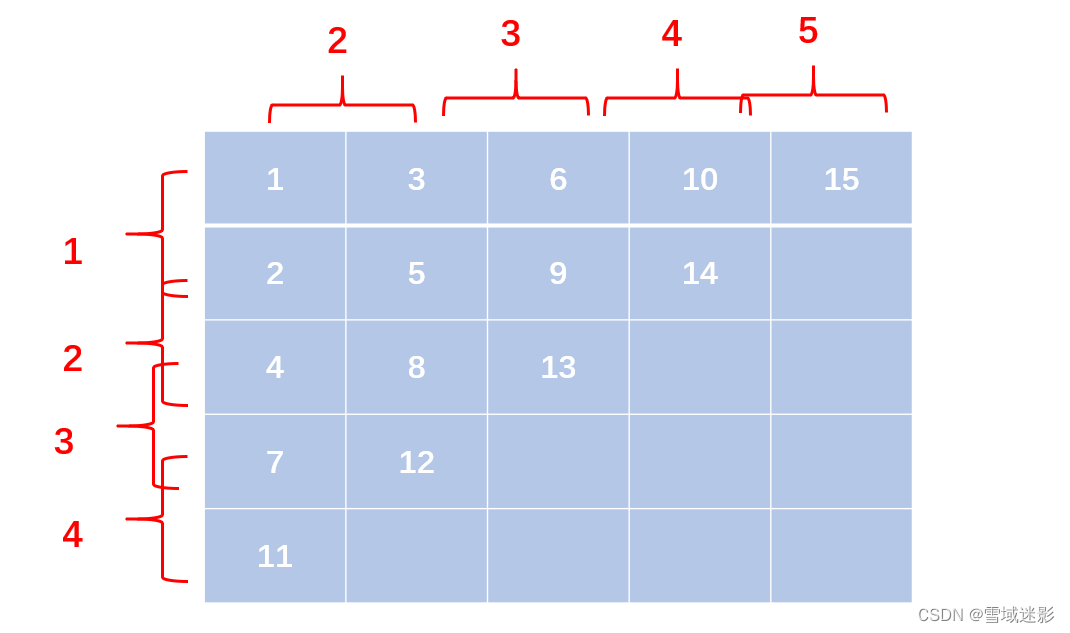
有了这个规律,我们遍历这样的上三角形,对每个位置累加出数字即可。
#include<iostream>
#include<vector>
using namespace std;
int main(){
int n;
while(cin >> n){
int k = 1; //起始元素为1
for(int i = 1; i <= n; i++){ //遍历每一行
cout << k << " "; //输出每行首
int temp = k;
for(int j = i + 1; j <= n; j++){ //遍历本行的数
temp += j; //每个数相差为j
cout << temp << " ";
}
cout << endl;
k += i; //下一行的首为这行首加上这行行号
}
}
return 0;
}
复杂度分析:
点向量坐标矩阵的几何意义介绍旋转矩阵的几何含义之前,先介绍一下点向量坐标矩阵的几何含义点:在一维空间下就是一个标量,如同一条直线上,以任意某一个位置为0点,以一定的尺度间隔为1,2,3...,相反方向为-1,-2,-3...;如此就形成了一维坐标系,这时候任何一个点都可以用一个数值表示,如点p1=5,即即从原点出发沿着x轴正方向移动5个尺度;点p2=-3,负方向移动3个尺度; 在一维坐标系上过原点做垂直于一维坐标系的直线,则形成了二维坐标系,此时描述一个点需要两个数值来表示点p3=(3,2),即从原点出发沿着x轴正方向移动3个尺度,在此基础上沿着y轴正方向移动两个尺度的位置就是点p3。
华为OD机试题本篇题目:明明的随机数题目输入描述输出描述:示例1输入输出说明代码编写思路最近更新的博客华为od2023|什么是华为od,od薪资待遇,od机试题清单华为OD机试真题大全,用Python解华为机试题|机试宝典【华为OD机试】全流程解析+经验分享,题型分享,防作弊指南华为o
system-view进入系统视图quit退到系统视图sysname交换机命名vlan20创建vlan(进入vlan20)displayvlan显示vlanundovlan20删除vlan20displayvlan20显示vlan里的端口20Interfacee1/0/24进入端口24portlink-typeaccessvlan20把当前端口放入vlan20undoporte1/0/10删除当前VLAN端口10displaycurrent-configuration显示当前配置02配置交换机支持TELNETinterfacevlan1进入VLAN1ipaddress192.168.3.100
所有题目均有五种语言实现。C实现目录、C++实现目录、Python实现目录、Java实现目录、JavaScript实现目录题目n行m列的矩阵,每个位置上有一个元素你可以上下左右行走,代价是前后两个位置元素值差的绝对值.另外,你最多可以使用一次传送阵(只能从一个数跳到另外一个相同的数)求从走上角走到右下角最少需要多少时间。输入描述:第一行两个整数n,m,分别代表矩阵的行和列。后面n行,每行m个整数,分别代表矩阵中的元素。输出描述:一个整数,表示最少需要多少时间。
西安华为OD面试体验开始投简历技术面试进展工作进展开始投简历去年一整年一直在考研和工作之间纠结,感觉自己的状态好像当时的疫情一样差劲。之前刚毕业的时候投了个大厂的简历,结果一面写算法的时候太拉跨了,虽然知道时dfs但是代码熟练度不够,放在平时给足时间自己可以调试通过,但是熟练度不够那面试当时就写不出来被刷了。说真的算法学到后期我感觉最重要的是熟练度和背板子(对于我这种普通玩家来说),面试题如果一上来短时间内想不出思路就完蛋了。然后由于当时找的工作不是很理想就又想考研了。但是考研是有风险的,我自我感觉自己可能冲不上那个学校,而找工作一个没成可以继续找嘛。本着抱着试试看的态度在boss上投了简历,
一、习惯约定图片来自PSINS(高精度捷联惯导算法)PSINS工具箱入门与详解.pptx二、基本旋转矩阵绕x轴逆时钟旋转α\alphaα角度Rx(α)=[ 1000cosαsinα0−sinαcosα]R_x(\alpha)=\begin{bmatrix}\1&0&0\\0&\cos\alpha&\sin\alpha\\0&-\sin\alpha&\cos\alpha\end{bmatrix}Rx(α)= 1000cosα−sinα0sinαcosα绕y轴逆时钟旋转α\alphaα角度Ry(α)=[ cosα0−sinα010sinα0cosα]R_y(\alpha
欧拉角、旋转矩阵及四元数1.简介2.欧拉角2.1欧拉角定义2.2右手系和左手系2.3转换流程3.旋转矩阵4.四元数4.1四元数与欧拉角和旋转矩阵之间等效变换4.2测试Matlab代码5.总结1.简介常用姿态参数表达方式包括方向余弦矩阵、欧拉轴/角参数、欧拉角、四元数以及罗德里格参数等。高分辨率光学遥感卫星主要采用欧拉角与四元数对姿态参数进行描述。这里着重讲解欧拉角、旋转矩阵和四元数。2.欧拉角2.1欧拉角定义欧拉角是表征刚体旋转的一种方法之一,由莱昂哈德·欧拉引入的三个角度,用于描述刚体相对于固定坐标系的方向。在摄影测量、空间科学或其它技术领域,一般用一组(三个)欧拉角描述两个空间坐标之间的旋
目录一、安装包链接二、安装详细步骤1.安装Wireshark和WinPcap2.安装OracleVMVirtualBox3.安装ensp三、安装后注册四、启动路由器出现40错误怎么解决一、安装包链接二、安装详细步骤链接:https://pan.baidu.com/s/1QbUUYMOMIV2oeIKHWP1SpA?pwd=xftx提取码:xftx1.安装Wireshark和WinPcap找到Wireshark安装包所在文件夹,双击它,按照以下步骤安装。2.安装OracleVMVirtualBox找到OracleVMVirtualBox安装包所在文件夹,双击它,按照以下步骤安装。注:可自定义安装
近日,上海证券交易所科创板披露的信息显示,嘉兴中润光学科技股份有限公司(下称“中润光学”)获得上市委会议通过。这意味着,中润光学的上市之路获得实质性进展,接下来将提交注册。据贝多财经了解,中润光学的招股书于2022年5月20日获得科创板受理,5个月后便获得上市委会议通过,进度不可谓不快。本次冲刺科创板上市,中润光学拟募资4.05亿元,计划用于高端光学镜头智能制造项目、高端光学镜头研发中心升级项目等。天眼查信息显示,中润光学成立于2012年8月,是一家以从事非金属矿物制品业为主的企业。当前,该公司的注册资本为6600万元,法定代表人为张平华。穿透股权可知,张平华也是该公司的实际控制人。据招股书介
三大公有云厂商,香港地区主机测评一、ping时延比对(厦门电信本地测试):Ping时延测试腾讯云阿里云华为云延迟率最低时延44ms,最高72ms,平均46ms47.242段:最低时延59ms,最高204ms,平均107ms最低时延45ms,最高93ms,平均47ms丢包率丢包率小有的ip段丢包率较大每个段都会有概率丢包阿里云:47.242段:最低时延59ms,最高204ms,平均107ms,有的ip段丢包率较大8.210段:最低时延64ms,最高232ms,平均119ms,丢包率较好腾讯云:最低时延44ms,最高72ms,平均46ms,丢包率小华为云:最低时延45ms,最高93ms,平均47m