
随着我们了解到机器人如何建立运动学模型和动力学模型之后,我们可以使用Matlab中的仿真工具箱内来对模型的准确性进行验证,并且可以通过内置的函数进行简单的轨迹规划和可视化观察,本节涉及到的工具箱是MATLAB自带的Robotics Toolbox工具箱。
下载工具箱文件夹:下载地址:Robotics Toolbox
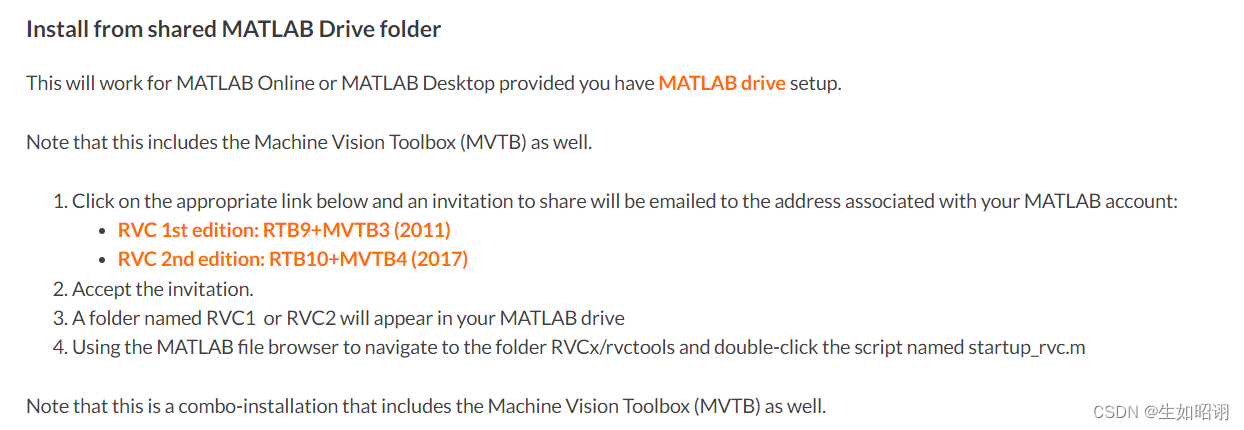
解压文件并放置于指定文件夹
将该文件夹路径添加到MATALB路径中:
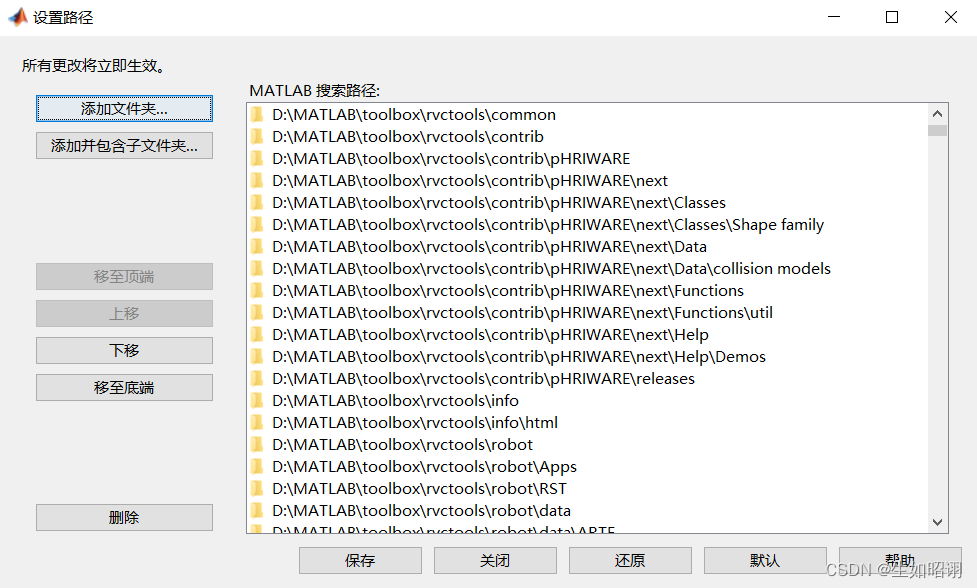
打开MATLAB命令行:窗口输入指令
startup_rvc
1)参数介绍:
alpha A theta D sigma convention 关节扭角 连杆长度 关节角度 关节偏置 区分转动关节(0)和移动关节(1) 区分modified和standard两种DH模型
2)代码示例:
% 各连杆参数(虚拟)
l1= 0.08;
l2= 0.2;
l3= 0.2;
% 基本偏置参数
thetaVal = zeROS(4,1);
% 定义各个连杆以及关节类型,默认为转动关节
% theta d a alpha
% 连杆偏距d 连杆长度 关节偏角alpha
L1=Link([ 0 0 0 0], 'modified'); % [四个DH参数], options
L2=Link([ 0 0 l1 -pi/2], 'modified');
L3=Link([ 0 0 l2 0], 'modified');
L4=Link([ 0 ,0 l3 0], 'modified');
1)参数介绍:
name offset 机器人名称 各连杆偏置参数
2)代码示例:
% 将连杆组成机械臂
robot=SerialLink([L1,L2,L3,L4]);
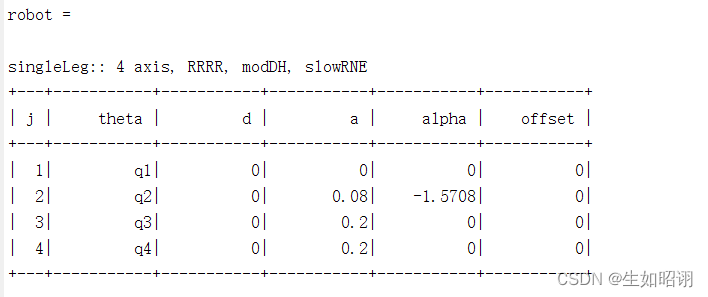
robot.name='singleLeg';
robot.offset=thetaVal;
3)输出窗口:
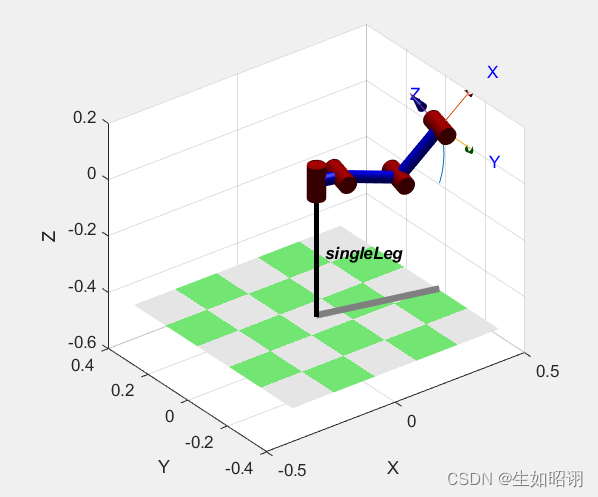
1)代码示例:
% 基本演示
robot.display();
view(3);
% 解决robot.teach()和plot的索引超出报错
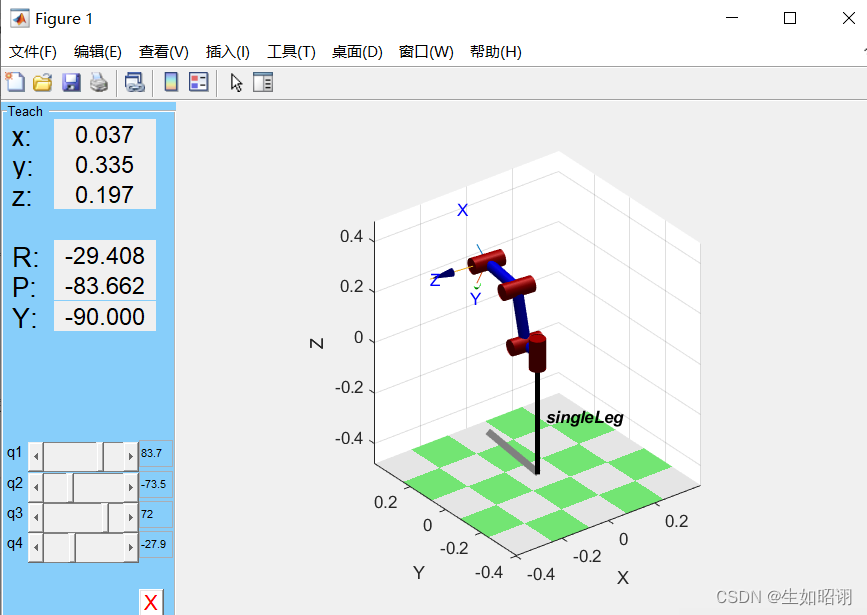
robot.teach();
2)可视化界面:
1)使用方法:
函数 输入 输出 备注 fkine 各关节变量值 齐次变换矩阵 默认弧度,输入为1*N矩阵 ikine 齐次变换矩阵、初始值 各关节变量值 默认计算6自由度以上的机械臂,需要mask通知
注:在实际过程中较少使用ikine函数,可自行编写运动学反解函数;
2)代码示例:
% 运动学正解验证
q1 = 30*pi/180;
q2 = 30*pi/180;
q3 = -60*pi/180;
qn = [q1 q2 q3 0];
T = robot.fkine(qn)
% 运动学逆解验证
% theta d a alpha sigma
L(1) = Link([ 0 0 10 0 0 ]);
L(2) = Link([ 0 0 20 0 0 ]);
% 正运动学解算,得到机器人末端的齐次变换矩阵
init = [0 pi/4];
targ = [pi/2 pi];
T0=robot.fkine(init);
TF=robot.fkine(targ);
% 得到机器人在变换过程中每一步(step)的齐次变换矩阵
step = 200;
TC=ctraj(T0,TF,step);
% 逆运动学计算
qq=robot.ikine(TC,'mask',[1 1 1 0 0 0]);
1)参数分析:
输入 始终点位姿、采样点个数 位姿:1*N弧度值 输出 各关节角度、角速度、角加速度 单位:弧度
2)代码示例:
% 五项式轨迹规划动态
% 设定位姿为(0.4,0.1,-0.1 -- 0.4,0.1,0.1)
%根据起始点位姿,得到起始点关节角
q1=[-14.036*pi/180 46.76*pi/180 -60*pi/180 0];
%根据终止点位姿,得到终止点关节角
q2=[-14.036*pi/180 13.24*pi/180 -60*pi/180 0];
%五次多项式轨迹,得到关节角度,角速度,角加速度,50为采样点个数
[q ,qd, qdd]=jtraj(q1,q2,50);
grid on
%根据插值,得到末端执行器位姿
T=robot.fkine(q);
nT=T.T;
plot3(squeeze(nT(1,4,:)),squeeze(nT(2,4,:)),squeeze(nT(3,4,:)));
名称 值 说明 实例 workplace W W为1×6的行向量,用来表示视野的xyz轴范围 w=[-20 20 -20 20 -20 20] floorlevel L 楼板的z坐标值(目前咱不了解) delay D 动画帧之间的延迟(单位:s),用这个可以用来控制动画中机器人动作的快慢 D=0.01 [no]loop 是否永远在轨道上循环 fps fps 每秒钟帧率,使用fps时候delay不起作用 fps=60 trail L 绘制机器人末端的轨迹,L的值表示轨迹颜色 L=‘r’ movie M 保存成动画到当前文件夹,M是文件名 M=‘test.gif’ scale S 关节大小的比例因子 S=0.5 view V V=[az el],通过方位角az和el来调整视角 L=[45,25]
robot.plot(q,'workspace',[-40 40 -40 40 -40 40],'delay',0.001,'fps',120,'trail','b','view',[30,50]);
% 注:在实际的简单操作中可以直接使用默认options,故只输入关节角度即可
2)代码示例:
[q ,qd, qdd]=jtraj(q1,q2,50);
grid on
%根据插值,得到末端执行器位姿
T=robot.fkine(q);
nT=T.T;
plot3(squeeze(nT(1,4,:)),squeeze(nT(2,4,:)),squeeze(nT(3,4,:)));
%输出末端轨迹
hold on
%动画演示
robot.plot(q);
3)动画界面:
jacob函数:求解雅克比矩阵

ctraj函数:计算在每一步(step)变换时的末端相对于首端的齐次变换矩阵;
transl函数:将齐次变换矩阵转换为坐标值;
isrevolute函数:测试关节是否可以转动
直线规划、圆规划测试代码:
clear ALL
close ALL
% startup_rvc
% theta表示关节角,d为偏置距离,a为杆长,alpha为杆扭角,sigma为0表示旋转关节
% theta d a alpha sigma 连杆的DH参数
L1 = Link([0 84.72 41.04 pi/2 0]);
L2 = Link([0 0 200 0 0]);
L3 = Link([0 0 214.8 0 0]);
% 限制转动角度
L1.qlim = [deg2rad(-170) deg2rad(170)];
L2.qlim = [deg2rad(-60) deg2rad(85)];
L3.qlim = [deg2rad(-90) deg2rad(10)];
mrbt = SerialLink([L1 L2 L3], 'name', '机械臂仿真');
% 模式1,控制关节角拖动变化
view(3);
mrbt.teach() %调出figure界面模拟控制关节角
% % 模式2,直线规划测试
% T1 = transl(300,220,40); %起点
% T2 = transl(320,-50,220); %终点
% %ctraj 利用匀加速匀减速规划轨迹
% T = ctraj(T1,T2,50);
% Tj = transl(T);
% %输出末端轨迹
% plot3(Tj(:,1),Tj(:,2),Tj(:,3));
% grid on;
%
% %当反解的机器人对象的自由度少于6时,要用mask vector减少自由度
% %无法直接调用ikine作为运动学反解函数
% q = mrbt.ikine(T,'mask',[1 1 1 0 0 0]);
%
% %调整了一下角度,方便观察
% view(113,23);
% mrbt.plot(q,'tilesize',500);
% % 模式3,定义圆
% N = (0:0.5:100)';
% center = [275 150 50];
% radius = 50;
% theta = ( N/N(end) )*2*pi;
% points = (center + radius*[cos(theta) sin(theta) zeros(size(theta))])';
% plot3(points(1,:),points(2,:),points(3,:),'r');
% %
% % pionts矩阵是“横着”的,取其转置矩阵,进一步得到其齐次变换矩阵
% T = transl(points');
% %
% % 当反解的机器人对象的自由度少于6时,要用mask vector进行忽略某个关节自由度
% q = mrbt.ikine(T,'mask',[1 1 1 0 0 0]);
% hold on;
% % 调整了一下角度,方便观察
% view(153,23)
% mrbt.plot(q,'tilesize',500);
我想在一个没有Sass引擎的类中使用Sass颜色函数。我已经在项目中使用了sassgem,所以我认为搭载会像以下一样简单:classRectangleincludeSass::Script::FunctionsdefcolorSass::Script::Color.new([0x82,0x39,0x06])enddefrender#hamlengineexecutedwithcontextofself#sothatwithintemlateicouldcall#%stop{offset:'0%',stop:{color:lighten(color)}}endend更新:参见上面的#re
我正在尝试用ruby中的gsub函数替换字符串中的某些单词,但有时效果很好,在某些情况下会出现此错误?这种格式有什么问题吗NoMethodError(undefinedmethod`gsub!'fornil:NilClass):模型.rbclassTest"replacethisID1",WAY=>"replacethisID2andID3",DELTA=>"replacethisID4"}end另一个模型.rbclassCheck 最佳答案 啊,我找到了!gsub!是一个非常奇怪的方法。首先,它替换了字符串,所以它实际上修改了
我有一些代码在几个不同的位置之一运行:作为具有调试输出的命令行工具,作为不接受任何输出的更大程序的一部分,以及在Rails环境中。有时我需要根据代码的位置对代码进行细微的更改,我意识到以下样式似乎可行:print"Testingnestedfunctionsdefined\n"CLI=trueifCLIdeftest_printprint"CommandLineVersion\n"endelsedeftest_printprint"ReleaseVersion\n"endendtest_print()这导致:TestingnestedfunctionsdefinedCommandLin
导读:随着叮咚买菜业务的发展,不同的业务场景对数据分析提出了不同的需求,他们希望引入一款实时OLAP数据库,构建一个灵活的多维实时查询和分析的平台,统一数据的接入和查询方案,解决各业务线对数据高效实时查询和精细化运营的需求。经过调研选型,最终引入ApacheDoris作为最终的OLAP分析引擎,Doris作为核心的OLAP引擎支持复杂地分析操作、提供多维的数据视图,在叮咚买菜数十个业务场景中广泛应用。作者|叮咚买菜资深数据工程师韩青叮咚买菜创立于2017年5月,是一家专注美好食物的创业公司。叮咚买菜专注吃的事业,为满足更多人“想吃什么”而努力,通过美好食材的供应、美好滋味的开发以及美食品牌的孵
matlab打开matlab,用最简单的imread方法读取一个图像clcclearimg_h=imread('hua.jpg');返回一个数组(矩阵),往往是a*b*cunit8类型解释一下这个三维数组的意思,行数、数和层数,unit8:指数据类型,无符号八位整形,可理解为0~2^8的数三个层数分别代表RGB三个通道图像rgb最常用的是24-位实现方法,即RGB每个通道有256色阶(2^8)。基于这样的24-位RGB模型的色彩空间可以表现256×256×256≈1670万色当imshow传入了一个二维数组,它将以灰度方式绘制;可以把图像拆分为rgb三层,可以以灰度的方式观察它figure(1
如何在Ruby中按名称传递函数?(我使用Ruby才几个小时,所以我还在想办法。)nums=[1,2,3,4]#Thisworks,butismoreverbosethanI'dlikenums.eachdo|i|putsiend#InJS,Icouldjustdosomethinglike:#nums.forEach(console.log)#InF#,itwouldbesomethinglike:#List.iternums(printf"%A")#InRuby,IwishIcoulddosomethinglike:nums.eachputs在Ruby中能不能做到类似的简洁?我可以只
?博客主页:https://xiaoy.blog.csdn.net?本文由呆呆敲代码的小Y原创,首发于CSDN??学习专栏推荐:Unity系统学习专栏?游戏制作专栏推荐:游戏制作?Unity实战100例专栏推荐:Unity实战100例教程?欢迎点赞?收藏⭐留言?如有错误敬请指正!?未来很长,值得我们全力奔赴更美好的生活✨------------------❤️分割线❤️-------------------------
C#实现简易绘图工具一.引言实验目的:通过制作窗体应用程序(C#画图软件),熟悉基本的窗体设计过程以及控件设计,事件处理等,熟悉使用C#的winform窗体进行绘图的基本步骤,对于面向对象编程有更加深刻的体会.Tutorial任务设计一个具有基本功能的画图软件**·包括简单的新建文件,保存,重新绘图等功能**·实现一些基本图形的绘制,包括铅笔和基本形状等,学习橡皮工具的创建**·设计一个合理舒适的UI界面**注明:你可能需要先了解一些关于winform窗体应用程序绘图的基本知识,以及关于GDI+类和结构的知识二.实验环境Windows系统下的visualstudio2017C#窗体应用程序三.
说在前面这部分我本来是合为一篇来写的,因为目的是一样的,都是通过独立按键来控制LED闪灭本质上是起到开关的作用,即调用函数和中断函数。但是写一篇太累了,我还是决定分为两篇写,这篇是调用函数篇。在本篇中你主要看到这些东西!!!1.调用函数的方法(主要讲语法和格式)2.独立按键如何控制LED亮灭3.程序中的一些细节(软件消抖等)1.调用函数的方法思路还是比较清晰地,就是通过按下按键来控制LED闪灭,即每按下一次,LED取反一次。重要的是,把按键与LED联系在一起。我打算用K1来作为开关,看了一下开发板原理图,K1连接的是单片机的P31口,当按下K1时,P31是与GND相连的,也就是说,当我按下去时
MIMO技术的优缺点优点通过下面三个增益来总体概括:阵列增益。阵列增益是指由于接收机通过对接收信号的相干合并而活得的平均SNR的提高。在发射机不知道信道信息的情况下,MIMO系统可以获得的阵列增益与接收天线数成正比复用增益。在采用空间复用方案的MIMO系统中,可以获得复用增益,即信道容量成倍增加。信道容量的增加与min(Nt,Nr)成正比分集增益。在采用空间分集方案的MIMO系统中,可以获得分集增益,即可靠性性能的改善。分集增益用独立衰落支路数来描述,即分集指数。在使用了空时编码的MIMO系统中,由于接收天线或发射天线之间的间距较远,可认为它们各自的大尺度衰落是相互独立的,因此分布式MIMO