本篇文章是记录我个人在学习机械臂时的一些想法,我只是初学者,如果各位有发现某些错误,麻烦在评论区批评或指出,我会第一时间改正,谢谢。
此篇为解析法的实现,我的另一篇博客详细说明了数值法的实现,同样都给出了MATLAB代码,地址如下:https://blog.csdn.net/qq_43557907/article/details/125353210
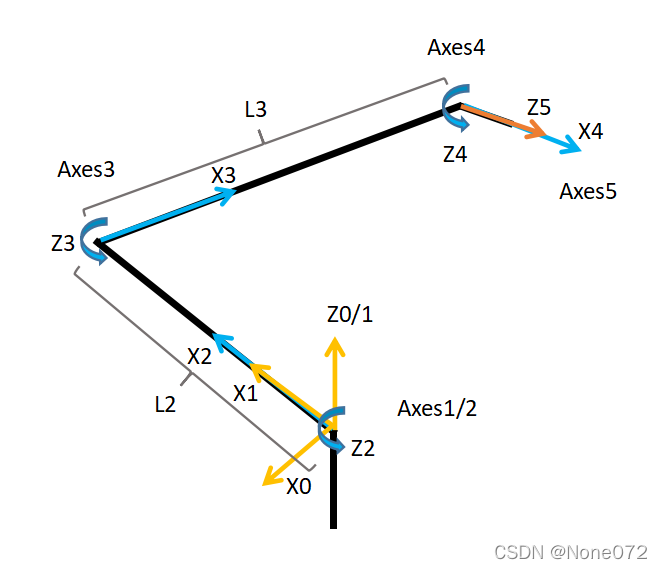
对于某宝上常见的5DOFs机械手臂,应用MDH(改进D-H)参数可建立如下坐标系:
MDH参数表:
| i | alphai-1 | ai-1 | di | thetai |
|---|---|---|---|---|
| 1 | 0 | 0 | 0 | theta1 |
| 2 | -pi/2 | 0 | 0 | theta2 |
| 3 | 0 | L2 | 0 | theta3 |
| 4 | 0 | L3 | 0 | theta4 |
| 5 | -pi/2 | 0 | 0 | theta5 |
MATLAB程序如下:
clear;
close all;
clc;
clear L;
angle=pi/180; %角度转换
L1 = 0; L2 = 80; L3 = 60; L4 = 0;
%D-H参数表
theta1 = 0; D1 = 0; A1 = 0; alpha1 = 0;
theta2 = 0; D2 = 0; A2 = 0; alpha2 = -pi/2;
theta3 = 0; D3 = 0; A3 = L2; alpha3 = 0;
theta4 = 0; D4 = 0; A4 = L3; alpha4 = 0;
theta5 = 0; D5 = 0; A5 = 0; alpha5 = -pi/2;
%% DH法建立模型,关节转角,关节距离,连杆长度,连杆转角,关节类型(0转动,1移动),关节范围
L(1) = Link([theta1, D1, A1, alpha1, 0], 'modified');L(1).qlim =[-180*angle, 180*angle];
L(2) = Link([theta2, D2, A2, alpha2, 0], 'modified');L(2).qlim =[-180*angle, 180*angle];
L(3) = Link([theta3, D3, A3, alpha3, 0], 'modified');L(3).qlim =[-180*angle, 180*angle];
L(4) = Link([theta4, D4, A4, alpha4, 0], 'modified');L(4).qlim =[-180*angle, 180*angle];
L(5) = Link([theta5, D5, A5, alpha5, 0], 'modified');L(5).qlim =[-180*angle, 180*angle];
%% 显示机械臂
robot0 = SerialLink(L,'name','five');
theta = [0 -60 90 0 90]*angle; %初始关节角度
figure(1)
robot0.plot(theta);
title('五轴机械臂模型');
%% 运动学计算
T = robot0.fkine(theta).T; %运动学正解
t = DOF5_fkine(theta, L1, L2, L3, L4);
theta_ikine = DOF5_ikine(T, L1, L2, L3, L4);%逆解

计算齐次变换矩阵,

function t_fkine = DOF5_fkine(theta, l1, l2, l3, l4)
c1 = cos(theta(1));c2 = cos(theta(2));c3 = cos(theta(3));c4 = cos(theta(4));c5 = cos(theta(5));
s1 = sin(theta(1));s2 = sin(theta(2));s3 = sin(theta(3));s4 = sin(theta(4));s5 = sin(theta(5));
r11 = c1*c4*c5*(c2*c3-s2*s3) - c1*s4*c5*(c2*s3+s2*c3) + s1*s5;
r12 = -c1*c4*s5*(c2*c3-s2*s3) + c1*s4*s5*(c2*s3+s2*c3) + s1*c5;
r13 = -c1*s4*(c2*c3-s2*s3) - c1*c4*(c2*s3+s2*c3);
r21 = s1*c4*c5*(c2*c3-s2-s3) - s1*s4*c5*(c2*s3+s2*c3) - c1*s5;
r22 = -s1*c4*s5*(c2*c3-s2-s3) + s1*s4*s5*(c2*s3+s2*c3) - c1*c5;
r23 = -s1*s4*(c2*c3-s2*s3) - s1*c4*(c2*s3+s2*c3);
r31 = c4*c5*(-s2*c3-c2*s3) + s4*c5*(s2*s3-c2*c3);
r32 = -c4*s5*(-s2*c3-c2*s3) - s4*s5*(s2*s3-c2*c3);
r33 = -s4*(-s2*c3-c2*s3) + c4*(s2*s3-c2*c3);
px = (-s4*l4+l3)*(c1*c2*c3-c1*s2*s3) + c4*l4*(-c1*c2*s3-c1*s2*c3) + c1*c2*l2;
py = (-s4*l4+l3)*(s1*c2*c3-s1*s2*s3) + c4*l4*(-s1*c2*s3-s1*s2*c3) + s1*c2*l2;
pz = (-s4*l4+l3)*(-s2*c3-c2*s3) + c4*l4*(s2*s3-c2*c3) - s2*l2;
t_fkine = [r11 r12 r13 px; r21 r22 r23 py; r31 r32 r33 pz; 0 0 0 1];
end
令 theta = [0 -60 90 0 90]*angle;
Transformation Matrix:


与机器人工具箱中fkine()函数得到的矩阵一致。




MATLAB程序:
function theta_ikine = DOF5_ikine(oT, ol1, ol2, ol3, ol4)
%5自由度逆解运算
l1 = ol1; l2 = ol2; l3 = ol3; l4 = ol4;
r11 = oT(1, 1);r12 = oT(1, 2);r13 = oT(1, 3);px = oT(1, 4);
r21 = oT(2, 1);r22 = oT(2, 2);r23 = oT(2, 3);py = oT(2, 4);
r31 = oT(3, 1);r32 = oT(3, 2);r33 = oT(3, 3);pz = oT(3, 4);
% theta1 两个解
theta1_1 = atan2(py, px) - atan2(0, (px^2 + py^2)^0.5);
%theta1_2 = atan2(py, px) - atan2(0, -(px^2 + py^2)^0.5);
s1 = sin(theta1_1);
c1 = cos(theta1_1);
% theta3 两个解
c3 = ((px*c1)^2 + 2*px*py*s1*c1 + (py*s1)^2 + pz^2 - l2^2 - l3^2) / (2*l2*l3);
theta3_1 = atan2(sqrt(1-c3^2), c3);
theta3_2 = atan2(-sqrt(1-c3^2), c3);
s3_1 = sin(theta3_1);
s3_2 = sin(theta3_2);
% theta2 两个解
s2_1 = (pz*(c3*l3+l2)+s3_1*l3*(c1*px+s1*py))/(-(c3*l3+l2)^2-(s3_1*l3)^2);
s2_2 = (pz*(c3*l3+l2)+s3_2*l3*(c1*px+s1*py))/(-(c3*l3+l2)^2-(s3_2*l3)^2);
c2_1 = ((c1*px+s1*py)+s2_1*s3_1*l3)/(c3*l3+l2);
c2_2 = ((c1*px+s1*py)+s2_2*s3_2*l3)/(c3*l3+l2);
theta2_1 = atan2(s2_1, c2_1);
theta2_2 = atan2(s2_2, c2_2);
% theta5 一个解
theta5 = atan2(s1*r11-c1*r21, s1*r12-c1*r22);
% theta4 四个解
theta4_1_1 = atan2(s2_1*c3+c2_1*s3_1, s2_1*s3_1-c2_1*c3) + atan2(sqrt((s2_1*s3_1-c2_1*c3)^2+(s2_1*c3+c2_1*s3_1)^2-r33^2), r33);
theta4_1_2 = atan2(s2_1*c3+c2_1*s3_1, s2_1*s3_1-c2_1*c3) - atan2(sqrt((s2_1*s3_1-c2_1*c3)^2+(s2_1*c3+c2_1*s3_1)^2-r33^2), r33);
theta4_2_1 = atan2(s2_2*c3+c2_2*s3_2, s2_2*s3_2-c2_2*c3) + atan2(sqrt((s2_2*s3_2-c2_2*c3)^2+(s2_2*c3+c2_2*s3_2)^2-r33^2), r33);
theta4_2_2 = atan2(s2_2*c3+c2_2*s3_2, s2_2*s3_2-c2_2*c3) - atan2(sqrt((s2_2*s3_2-c2_2*c3)^2+(s2_2*c3+c2_2*s3_2)^2-r33^2), r33);
theta_ikine = [theta1_1 theta2_1 theta3_1 theta4_1_1 theta5;
theta1_1 theta2_1 theta3_1 theta4_1_2 theta5;
theta1_1 theta2_2 theta3_2 theta4_2_1 theta5;
theta1_1 theta2_2 theta3_2 theta4_2_2 theta5];
end
结果如下:

验证: 第一组解theta = [-0.0000 -1.0472 1.5708 5.2360 1.5708];
** 第二组解theta = [-0.0000 -1.0472 1.5708 -0.0000 1.5708];
第三、四组解皆成立。
在上面的基础上加入虚拟关节Axes6作为末端执行器,它的D-H参数为
theta6 = 0; D6 = L4; A6 = 0; alpha6 = 0; %虚拟关节
其中L4为Axes5到Axes6的距离。
1.建立{P}相对于{5}的T矩阵:
%% 手爪中心点{P}的T矩阵
T_P25 = [1 0 0 0;
0 1 0 0;
0 0 1 L4;
0 0 0 1];
2.建立{0}相对于世界坐标{W}的T矩阵:
%% 世界坐标{W}的T矩阵
T_02W= [1 0 0 0;
0 1 0 0;
0 0 1 L1;
0 0 0 1];
其中L1为世界坐标原点距离Axes0的距离。
3.建立{P}相对{W}的T矩阵:
%% {P}相对{W}的T矩阵
px = 50;py = 50; pz = 50;
T_P2W = [1 0 0 px;
0 1 0 py;
0 0 1 pz;
0 0 0 1];
T_P2W为P点在世界坐标系下的位姿,这里默认与{W}的旋转矩阵一致。
4.最后,我们可以得到0到5的T矩阵:
T = inv(T_02W)*T_P2W*inv(T_P25);
此时,可以通过逆解得到theta1-5的角度,即实现了使机械臂运动到指定坐标的任务。
例如,给定坐标{50, 50, 50},结果为



1.《机器人学导论》第四版
2.https://openrsl.blog.csdn.net/article/details/95792841
3.https://blog.csdn.net/weixin_42454034/article/details/109681661
我有一个用户工厂。我希望默认情况下确认用户。但是鉴于unconfirmed特征,我不希望它们被确认。虽然我有一个基于实现细节而不是抽象的工作实现,但我想知道如何正确地做到这一点。factory:userdoafter(:create)do|user,evaluator|#unwantedimplementationdetailshereunlessFactoryGirl.factories[:user].defined_traits.map(&:name).include?(:unconfirmed)user.confirm!endendtrait:unconfirmeddoenden
matlab打开matlab,用最简单的imread方法读取一个图像clcclearimg_h=imread('hua.jpg');返回一个数组(矩阵),往往是a*b*cunit8类型解释一下这个三维数组的意思,行数、数和层数,unit8:指数据类型,无符号八位整形,可理解为0~2^8的数三个层数分别代表RGB三个通道图像rgb最常用的是24-位实现方法,即RGB每个通道有256色阶(2^8)。基于这样的24-位RGB模型的色彩空间可以表现256×256×256≈1670万色当imshow传入了一个二维数组,它将以灰度方式绘制;可以把图像拆分为rgb三层,可以以灰度的方式观察它figure(1
华为OD机试题本篇题目:明明的随机数题目输入描述输出描述:示例1输入输出说明代码编写思路最近更新的博客华为od2023|什么是华为od,od薪资待遇,od机试题清单华为OD机试真题大全,用Python解华为机试题|机试宝典【华为OD机试】全流程解析+经验分享,题型分享,防作弊指南华为o
C#实现简易绘图工具一.引言实验目的:通过制作窗体应用程序(C#画图软件),熟悉基本的窗体设计过程以及控件设计,事件处理等,熟悉使用C#的winform窗体进行绘图的基本步骤,对于面向对象编程有更加深刻的体会.Tutorial任务设计一个具有基本功能的画图软件**·包括简单的新建文件,保存,重新绘图等功能**·实现一些基本图形的绘制,包括铅笔和基本形状等,学习橡皮工具的创建**·设计一个合理舒适的UI界面**注明:你可能需要先了解一些关于winform窗体应用程序绘图的基本知识,以及关于GDI+类和结构的知识二.实验环境Windows系统下的visualstudio2017C#窗体应用程序三.
MIMO技术的优缺点优点通过下面三个增益来总体概括:阵列增益。阵列增益是指由于接收机通过对接收信号的相干合并而活得的平均SNR的提高。在发射机不知道信道信息的情况下,MIMO系统可以获得的阵列增益与接收天线数成正比复用增益。在采用空间复用方案的MIMO系统中,可以获得复用增益,即信道容量成倍增加。信道容量的增加与min(Nt,Nr)成正比分集增益。在采用空间分集方案的MIMO系统中,可以获得分集增益,即可靠性性能的改善。分集增益用独立衰落支路数来描述,即分集指数。在使用了空时编码的MIMO系统中,由于接收天线或发射天线之间的间距较远,可认为它们各自的大尺度衰落是相互独立的,因此分布式MIMO
遍历文件夹我们通常是使用递归进行操作,这种方式比较简单,也比较容易理解。本文为大家介绍另一种不使用递归的方式,由于没有使用递归,只用到了循环和集合,所以效率更高一些!一、使用递归遍历文件夹整体思路1、使用File封装初始目录,2、打印这个目录3、获取这个目录下所有的子文件和子目录的数组。4、遍历这个数组,取出每个File对象4-1、如果File是否是一个文件,打印4-2、否则就是一个目录,递归调用代码实现publicclassSearchFile{publicstaticvoidmain(String[]args){//初始目录Filedir=newFile("d:/Dev");Datebeg
通常,数组被实现为内存块,集合被实现为HashMap,有序集合被实现为跳跃列表。在Ruby中也是如此吗?我正在尝试从性能和内存占用方面评估Ruby中不同容器的使用情况 最佳答案 数组是Ruby核心库的一部分。每个Ruby实现都有自己的数组实现。Ruby语言规范只规定了Ruby数组的行为,并没有规定任何特定的实现策略。它甚至没有指定任何会强制或至少建议特定实现策略的性能约束。然而,大多数Rubyist对数组的性能特征有一些期望,这会迫使不符合它们的实现变得默默无闻,因为实际上没有人会使用它:插入、前置或追加以及删除元素的最坏情况步骤复
在ruby中,你可以这样做:classThingpublicdeff1puts"f1"endprivatedeff2puts"f2"endpublicdeff3puts"f3"endprivatedeff4puts"f4"endend现在f1和f3是公共(public)的,f2和f4是私有(private)的。内部发生了什么,允许您调用一个类方法,然后更改方法定义?我怎样才能实现相同的功能(表面上是创建我自己的java之类的注释)例如...classThingfundeff1puts"hey"endnotfundeff2puts"hey"endendfun和notfun将更改以下函数定
我目前有一个reddit克隆类型的网站。我正在尝试根据我的用户之前喜欢的帖子推荐帖子。看起来K最近邻或k均值是执行此操作的最佳方法。我似乎无法理解如何实际实现它。我看过一些数学公式(例如k表示维基百科页面),但它们对我来说并没有真正意义。有人可以推荐一些伪代码,或者可以查看的地方,以便我更好地了解如何执行此操作吗? 最佳答案 K最近邻(又名KNN)是一种分类算法。基本上,您采用包含N个项目的训练组并对它们进行分类。如何对它们进行分类完全取决于您的数据,以及您认为该数据的重要分类特征是什么。在您的示例中,这可能是帖子类别、谁发布了该项
我查看了Stripedocumentationonerrors,但我仍然无法正确处理/重定向这些错误。基本上无论发生什么,我都希望他们返回到edit操作(通过edit_profile_path)并向他们显示一条消息(无论成功与否)。我在edit操作上有一个表单,它可以POST到update操作。使用有效的信用卡可以正常工作(费用在Stripe仪表板中)。我正在使用Stripe.js。classExtrasController5000,#amountincents:currency=>"usd",:card=>token,:description=>current_user.email)

